S-ar putea să vă placă și
- Neplan SimpowDocument8 paginiNeplan SimpowNelson Augusto Contreras RojasÎncă nu există evaluări
- Ee2257 LMDocument104 paginiEe2257 LMthamizmaniÎncă nu există evaluări
- Psoc 2015 NewDocument20 paginiPsoc 2015 Newvenki249Încă nu există evaluări
- Research On Differential Protection Algorithms of Power TransformersDocument6 paginiResearch On Differential Protection Algorithms of Power TransformersrstppÎncă nu există evaluări
- Digital Signal Processor Based Vbyf Control of Speed of Induction MotorDocument24 paginiDigital Signal Processor Based Vbyf Control of Speed of Induction MotorManu JainÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- PVarray Demos HelpDocument4 paginiPVarray Demos HelpManav Kumar0% (1)
- Investigation of Three-Phase Grid-Connected Inverter For Photovoltaic ApplicationDocument6 paginiInvestigation of Three-Phase Grid-Connected Inverter For Photovoltaic ApplicationAmran MaulanaÎncă nu există evaluări
- New CS ManualDocument68 paginiNew CS ManualmindsharpÎncă nu există evaluări
- Fuzzy Logic Based Photovoltaic Peak Power Tracking ControllerDocument46 paginiFuzzy Logic Based Photovoltaic Peak Power Tracking ControllerAlexandra Moinhos100% (1)
- Renewable Energy Training SystemsDocument28 paginiRenewable Energy Training SystemsTeodora Iorgulescu100% (1)
- PSP Assignment1 MzeeshanDocument11 paginiPSP Assignment1 MzeeshanMuhammad ZeeshanÎncă nu există evaluări
- UPS SystemDocument4 paginiUPS Systemमृत्युंजय झाÎncă nu există evaluări
- E PDFDocument178 paginiE PDFVasu IyerÎncă nu există evaluări
- Simulasi MatlabDocument4 paginiSimulasi MatlabNurrachmanSukhoMahadyÎncă nu există evaluări
- Performance of A Simple Mixed-Signal Controller of Shunt Active Power Filter Using Ota-Based CircuitDocument6 paginiPerformance of A Simple Mixed-Signal Controller of Shunt Active Power Filter Using Ota-Based CircuitShivam AgarwalÎncă nu există evaluări
- Modular Multilevel Converter Control Strategy With Fault ToleranceDocument6 paginiModular Multilevel Converter Control Strategy With Fault TolerancesatyacvaÎncă nu există evaluări
- 100kw Grid Connected PV ModuleDocument3 pagini100kw Grid Connected PV ModuleKapil DevÎncă nu există evaluări
- Variable Frequency Digital PWM Control For Low-Power Buck ConvertersDocument5 paginiVariable Frequency Digital PWM Control For Low-Power Buck Convertersantonytechno100% (1)
- Modeling, Simulation and Control of D-Statcom Using Atp/EmtpDocument4 paginiModeling, Simulation and Control of D-Statcom Using Atp/EmtpKalyan SrinivasÎncă nu există evaluări
- Wind Power Plant Induction Generator LabDocument8 paginiWind Power Plant Induction Generator LabAHMED EL HAMRIÎncă nu există evaluări
- Esd Manual With Viva QuestionDocument100 paginiEsd Manual With Viva QuestionrubiniravichandranÎncă nu există evaluări
- PSCAD IntroductionDocument72 paginiPSCAD IntroductionksbwingsÎncă nu există evaluări
- Control System Lab ManualDocument76 paginiControl System Lab ManualYuvaraj Shan50% (2)
- Design of Multi-Level Inverter and Its Application As Statcom To Compensate Voltage Sags Due To FaultsDocument6 paginiDesign of Multi-Level Inverter and Its Application As Statcom To Compensate Voltage Sags Due To FaultsManpreet SinghÎncă nu există evaluări
- Lab 6. Simulation of Feedback Analog - Digital ConvertersDocument8 paginiLab 6. Simulation of Feedback Analog - Digital ConvertersIoanaNicoletaÎncă nu există evaluări
- Matlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesDocument22 paginiMatlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesAchraf BourassÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Architecture of NanogridDocument1 paginăArchitecture of NanogridshashiÎncă nu există evaluări
- PSCAD Course NotesDocument72 paginiPSCAD Course NotesPacha Mami100% (1)
- Detailed Model of A 100-kW Grid-Connected PV Array - MATLAB & SimulinkDocument3 paginiDetailed Model of A 100-kW Grid-Connected PV Array - MATLAB & SimulinkMuhammad Kamran Mustafa100% (1)
- Digsilent GMBH: P1843 - Optimization of The Protection Settings For The 115 KV Electrical Power System of PEA in ThailandDocument22 paginiDigsilent GMBH: P1843 - Optimization of The Protection Settings For The 115 KV Electrical Power System of PEA in ThailandGIngaa100% (1)
- ACCIONA - Grid Integration Experience CIGRE 2010ID31VER89Document23 paginiACCIONA - Grid Integration Experience CIGRE 2010ID31VER89enerconÎncă nu există evaluări
- Sliding Mode Control of SMPS: Ms. A. Jonisha, Mrs. V. Devi MaheswaranDocument11 paginiSliding Mode Control of SMPS: Ms. A. Jonisha, Mrs. V. Devi MaheswaranInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Three-Phase Overcurrent Relay Spaj 131 C: Product GuideDocument12 paginiThree-Phase Overcurrent Relay Spaj 131 C: Product GuideSharaf Ali ZyoudÎncă nu există evaluări
- Matlab-Simulink Controller DesignDocument4 paginiMatlab-Simulink Controller DesignMohamed SomaiÎncă nu există evaluări
- Ps Lab ManualDocument132 paginiPs Lab ManualRamkrishnaÎncă nu există evaluări
- Modelling and Simulation of Static Var Compensator with MatlabDocument6 paginiModelling and Simulation of Static Var Compensator with MatlabYasir AmmarÎncă nu există evaluări
- UPS SystemDocument4 paginiUPS SystemMadhu JbÎncă nu există evaluări
- Pscad PV THDDocument6 paginiPscad PV THDRavishankar KankaleÎncă nu există evaluări
- MPPT - Maximum Power Point TrackingDocument9 paginiMPPT - Maximum Power Point TrackingSanjeev ReddyÎncă nu există evaluări
- ANNA Univ. 2009 Reg M.E. - Power System EngineerinG SyllabusDocument23 paginiANNA Univ. 2009 Reg M.E. - Power System EngineerinG SyllabuschandueeeÎncă nu există evaluări
- Design and Simulation of Power ConvertersDocument48 paginiDesign and Simulation of Power ConvertersHoang NgoÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- (Doi 10.1109/ICMCS.2011.5945712) Amatoul, Fatima Zahra Lamchich, Moulay Tahar Outzourhit, Abdel - (IEEE 2011 International Conference On Multimedia Computing and Systems (ICMCS) - Ouarzazate, MorDocument6 pagini(Doi 10.1109/ICMCS.2011.5945712) Amatoul, Fatima Zahra Lamchich, Moulay Tahar Outzourhit, Abdel - (IEEE 2011 International Conference On Multimedia Computing and Systems (ICMCS) - Ouarzazate, MorDiego Quintana ValenzuelaÎncă nu există evaluări
- Energy Management Solutions Monitoring and SavingsDocument28 paginiEnergy Management Solutions Monitoring and SavingsTapelea Cristian100% (1)
- Smart Audio Amplifier: Josue Zarate V, Enrique Muñoz C, Ruben Diaz CDocument20 paginiSmart Audio Amplifier: Josue Zarate V, Enrique Muñoz C, Ruben Diaz CArmen Aria DanlyÎncă nu există evaluări
- Design and Implementation of An Automatic High-Performance Voltage StabilizerDocument11 paginiDesign and Implementation of An Automatic High-Performance Voltage StabilizerRANAIVOARILALA FanomezantsoaÎncă nu există evaluări
- Analysis and Design of A Multiple Feedback Loop Control Strategy For Single Phase Voltage Source UPS InvertersDocument10 paginiAnalysis and Design of A Multiple Feedback Loop Control Strategy For Single Phase Voltage Source UPS InvertersFelipeFalconiÎncă nu există evaluări
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 paginiDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourÎncă nu există evaluări
- Short-Circuit Calculations PDFDocument11 paginiShort-Circuit Calculations PDFkgunaÎncă nu există evaluări
- Improving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshDocument5 paginiImproving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshsarathÎncă nu există evaluări
- Non-Linear Predictive Control of A DC-to-DC ConverterDocument5 paginiNon-Linear Predictive Control of A DC-to-DC ConvertermenguemengueÎncă nu există evaluări
- Wattrouter M - User ManualDocument66 paginiWattrouter M - User Manualtouny112Încă nu există evaluări
- ESPE03Document9 paginiESPE03Karthi KeyanÎncă nu există evaluări
- Full Control of A PWM DCAC Converter For AC Voltage RegulationDocument9 paginiFull Control of A PWM DCAC Converter For AC Voltage RegulationAndrés Felipe CelisÎncă nu există evaluări
- Irjet V4i4113Document4 paginiIrjet V4i4113sambit dasÎncă nu există evaluări
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDe la EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorÎncă nu există evaluări
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetEvaluare: 2 din 5 stele2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetÎncă nu există evaluări
- Albania Oil and Gas and Energy 2015Document262 paginiAlbania Oil and Gas and Energy 2015sdiamanÎncă nu există evaluări
- 2 Value For Money EvaluationDocument3 pagini2 Value For Money Evaluationsdiaman100% (1)
- Boiler Design AutomationDocument61 paginiBoiler Design Automationsdiaman100% (2)
- Air Pollution Control Systems Methods For Boilers UFC PDFDocument123 paginiAir Pollution Control Systems Methods For Boilers UFC PDFsdiamanÎncă nu există evaluări
- Introduction to Large Combustion Plant (LCP) Directive ComplianceDocument37 paginiIntroduction to Large Combustion Plant (LCP) Directive CompliancesdiamanÎncă nu există evaluări
- 3 Kovacs MolnarDocument4 pagini3 Kovacs MolnarsdiamanÎncă nu există evaluări
- Renew Efficiency with Air Preheater Seal UpgradesDocument11 paginiRenew Efficiency with Air Preheater Seal UpgradessdiamanÎncă nu există evaluări
- Analysis of South-East Europe TransmissiDocument8 paginiAnalysis of South-East Europe TransmissisdiamanÎncă nu există evaluări
- 01 Ind-02 ButterlinDocument7 pagini01 Ind-02 ButterlinsdiamanÎncă nu există evaluări
- 10c Allemand Egtei BilthovenDocument11 pagini10c Allemand Egtei BilthovensdiamanÎncă nu există evaluări
- P 42Document15 paginiP 42sdiamanÎncă nu există evaluări
- Purvil Khakharia PHD Dissertation 2015 PDFDocument170 paginiPurvil Khakharia PHD Dissertation 2015 PDFsdiamanÎncă nu există evaluări
- Combination of SNCR and SCR NOx Emission Control SystemsDocument8 paginiCombination of SNCR and SCR NOx Emission Control SystemssdiamanÎncă nu există evaluări
- Wet FGD Types and Fundamentals 8-08Document42 paginiWet FGD Types and Fundamentals 8-08Aticky Bain-MarieÎncă nu există evaluări
- Clna17669enc 001 PDFDocument372 paginiClna17669enc 001 PDFsdiamanÎncă nu există evaluări
- ML051920220 Fme PDFDocument25 paginiML051920220 Fme PDFsdiamanÎncă nu există evaluări
- 4.5 Large Combustion Plants - FinalDocument11 pagini4.5 Large Combustion Plants - FinalsdiamanÎncă nu există evaluări
- Foreign Material Exclusion PDFDocument22 paginiForeign Material Exclusion PDFsdiamanÎncă nu există evaluări
- Environmental Policy Brief Kosovo 2008 PDFDocument17 paginiEnvironmental Policy Brief Kosovo 2008 PDFsdiamanÎncă nu există evaluări
- SE - Ang 26.12 PDFDocument41 paginiSE - Ang 26.12 PDFsdiamanÎncă nu există evaluări
- Directive 2010-75-EU On Industrial EmissionsDocument103 paginiDirective 2010-75-EU On Industrial EmissionsRoberto MoralesÎncă nu există evaluări
- Magarini Atomic Spectroscopy For Enviro 01 08Document115 paginiMagarini Atomic Spectroscopy For Enviro 01 08Mohd SyafiqÎncă nu există evaluări
- KFW Coal Briefing April2013Document8 paginiKFW Coal Briefing April2013sdiamanÎncă nu există evaluări
- Environment Protection and Energy Efficency PDFDocument12 paginiEnvironment Protection and Energy Efficency PDFsdiamanÎncă nu există evaluări
- Magarini Atomic Spectroscopy For Enviro 01 08Document115 paginiMagarini Atomic Spectroscopy For Enviro 01 08Mohd SyafiqÎncă nu există evaluări
- 1StateofNature PDFDocument135 pagini1StateofNature PDFsdiamanÎncă nu există evaluări
- Sivacon S4Document50 paginiSivacon S4ulasÎncă nu există evaluări
- Effect of Amino-Desulphurization On The Concentration Retrieval of SO2 PDFDocument4 paginiEffect of Amino-Desulphurization On The Concentration Retrieval of SO2 PDFsdiamanÎncă nu există evaluări
- Global Wind Energy Outlook 2016Document44 paginiGlobal Wind Energy Outlook 2016sdiaman100% (1)
- A Low Cost and High Efficient Facility For Removal of SO2 and NOx in The Flue Gas From Coal Fire Power Plant PDFDocument3 paginiA Low Cost and High Efficient Facility For Removal of SO2 and NOx in The Flue Gas From Coal Fire Power Plant PDFsdiamanÎncă nu există evaluări
- Roebuck 1942Document12 paginiRoebuck 1942Imam Saja DechÎncă nu există evaluări
- Ice-Lined Refrigerator ManualDocument8 paginiIce-Lined Refrigerator ManualEmilioPerezBallesterosÎncă nu există evaluări
- PML Rev-I Preferred Manufacturer List for PT Pertamina EPDocument12 paginiPML Rev-I Preferred Manufacturer List for PT Pertamina EPAndreas Schlager100% (1)
- Lg938l - Operation & Maintenance ManualDocument114 paginiLg938l - Operation & Maintenance ManualMuhammad Nadim MakhlufÎncă nu există evaluări
- Nature of Acidity and Lime Requirement in Acid Soils of ManipurDocument8 paginiNature of Acidity and Lime Requirement in Acid Soils of ManipurIJASRETÎncă nu există evaluări
- Consolidation: By. Rajesh S.GujarDocument33 paginiConsolidation: By. Rajesh S.Gujardarshan_dave17Încă nu există evaluări
- Fajs FSXDocument8 paginiFajs FSXJunhy Bandeira CassandraÎncă nu există evaluări
- Filter DesignDocument4 paginiFilter Designhassan11783Încă nu există evaluări
- Ashrae - 2009 I-P - F09 - AddDocument2 paginiAshrae - 2009 I-P - F09 - AddSergio SemmÎncă nu există evaluări
- Grounding Vs BondingDocument2 paginiGrounding Vs BondingVictor HutahaeanÎncă nu există evaluări
- A03_Grader_IRCD_InstructionsDocument2 paginiA03_Grader_IRCD_InstructionsClausulaLover24Încă nu există evaluări
- Sad Thesis Guidelines FinalsDocument13 paginiSad Thesis Guidelines FinalsJes RamosÎncă nu există evaluări
- Civil 3 8sem PDFDocument43 paginiCivil 3 8sem PDFG0utham100% (1)
- Customize ADFS sign-in page brandingDocument4 paginiCustomize ADFS sign-in page brandingmicu0% (1)
- How to Operate AAS with SignPal & PhotoPRINTDocument25 paginiHow to Operate AAS with SignPal & PhotoPRINTLucian DogariuÎncă nu există evaluări
- Cs 180 Notes UCLADocument3 paginiCs 180 Notes UCLAnattaq12345Încă nu există evaluări
- SRDK Cryocooler Service Manual: For Service Personnel OnlyDocument151 paginiSRDK Cryocooler Service Manual: For Service Personnel OnlyOtávio PagnoncelliÎncă nu există evaluări
- DMD Documentation Error - Freetronics ForumDocument3 paginiDMD Documentation Error - Freetronics ForumapofviewÎncă nu există evaluări
- Manual Service Aoc - E943fwskDocument51 paginiManual Service Aoc - E943fwskEduardo BentoÎncă nu există evaluări
- List of Projects Related To Transportation Highway and BridgesDocument5 paginiList of Projects Related To Transportation Highway and BridgesOyedotun TundeÎncă nu există evaluări
- Airflex 728 Vinyl Acetate-Ethylene Copolymer Modified With Vinyl ChlorideDocument2 paginiAirflex 728 Vinyl Acetate-Ethylene Copolymer Modified With Vinyl ChlorideNissim Hazar CasanovaÎncă nu există evaluări
- XZX ZX ZXDocument4 paginiXZX ZX ZXWong VoonyeeÎncă nu există evaluări
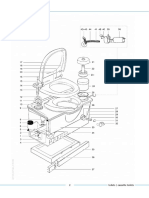
- Cassette toilet spare parts guide for models C2, C3 and C4Document21 paginiCassette toilet spare parts guide for models C2, C3 and C4georgedragosÎncă nu există evaluări
- 02 - Critical Customers Complains enDocument8 pagini02 - Critical Customers Complains enKJDNKJZEF100% (1)
- Excellent Hex Key Wrench: English VersionDocument54 paginiExcellent Hex Key Wrench: English Versionmg pyaeÎncă nu există evaluări
- QUS 303 CONSTRUCTION ECONOMICSDocument21 paginiQUS 303 CONSTRUCTION ECONOMICSjudexnams1on1Încă nu există evaluări
- Brochure 45 AntasariDocument11 paginiBrochure 45 AntasariFisio Terapi100% (1)
- Pressure Vessel Rivets Welded Joints MDSP PrimeDocument16 paginiPressure Vessel Rivets Welded Joints MDSP PrimeIvanÎncă nu există evaluări
- Anchors and Fall Arrest System A Guide To Good Practice: PublicationDocument22 paginiAnchors and Fall Arrest System A Guide To Good Practice: PublicationEdward C100% (1)