S-ar putea să vă placă și
- Methods of Radar Cross-section AnalysisDe la EverandMethods of Radar Cross-section AnalysisJ.W. Jr. CrispinÎncă nu există evaluări
- Land GearDocument18 paginiLand Geardatav44Încă nu există evaluări
- Integrated Landing Gear System PDFDocument14 paginiIntegrated Landing Gear System PDFMario Di PisaÎncă nu există evaluări
- Design and Analysis of Modified Oleo Strut Shock Absorber System in Aircraft Landing GearDocument4 paginiDesign and Analysis of Modified Oleo Strut Shock Absorber System in Aircraft Landing GearMisbah PatelÎncă nu există evaluări
- crj-1000 FSB PDFDocument152 paginicrj-1000 FSB PDFSEBASTIAN SALAMANCA SERRAÎncă nu există evaluări
- General Dynamics F-16 Fighting Falcon-Tech SheetDocument19 paginiGeneral Dynamics F-16 Fighting Falcon-Tech Sheetrock67% (3)
- Aces II EjectionSeat RestorationDocument2 paginiAces II EjectionSeat RestorationEastWest IndustriesÎncă nu există evaluări
- Ejection SeatDocument5 paginiEjection SeatBlake Sheppard WingmanÎncă nu există evaluări
- $MP 015 25Document12 pagini$MP 015 25Mohammad Sli100% (1)
- Afi11 2f 16v3 - 944fwsup1Document21 paginiAfi11 2f 16v3 - 944fwsup1yoyoÎncă nu există evaluări
- Fim CRJ-200Document6 paginiFim CRJ-200David Camilo Limachi QuispeÎncă nu există evaluări
- F-16d BLK 50 AlbaceteDocument40 paginiF-16d BLK 50 AlbacetedimÎncă nu există evaluări
- Duracell Ultra SLA General Purpose Product Sheet ID3713Document2 paginiDuracell Ultra SLA General Purpose Product Sheet ID3713Caja FuegoÎncă nu există evaluări
- Overview of The Full Scale Durability Tests On F-35 Lightning II ProgramDocument21 paginiOverview of The Full Scale Durability Tests On F-35 Lightning II ProgrampuhumightÎncă nu există evaluări
- Service News Vol 30 No 2 2005 PDFDocument14 paginiService News Vol 30 No 2 2005 PDFangelo marraÎncă nu există evaluări
- To BMS1F 16CM 1Document207 paginiTo BMS1F 16CM 1Michael EvansÎncă nu există evaluări
- FS2004 - The Aircraft - CFG FileDocument5 paginiFS2004 - The Aircraft - CFG FiletumbÎncă nu există evaluări
- Matlab Based Software For Aircraft Structural Analysis and DesignDocument11 paginiMatlab Based Software For Aircraft Structural Analysis and DesignsaadÎncă nu există evaluări
- Analysis of Different Designed Landing Gears For A Light AircraftDocument4 paginiAnalysis of Different Designed Landing Gears For A Light AircraftarulmuruguÎncă nu există evaluări
- Esna CatalogDocument12 paginiEsna Catalogbalaji_jayadeva9546Încă nu există evaluări
- Aircraft Flight Control System ModellingDocument10 paginiAircraft Flight Control System ModellingMahmoudÎncă nu există evaluări
- Testing of The V-22 Flight Control SystemDocument16 paginiTesting of The V-22 Flight Control SystemliuhkÎncă nu există evaluări
- Fighters Performance EvaluationDocument35 paginiFighters Performance Evaluationavenger001Încă nu există evaluări
- Landing Gear Articolo Stress - 2 PDFDocument9 paginiLanding Gear Articolo Stress - 2 PDFAB1984Încă nu există evaluări
- ADS 33E RotorcraftDocument103 paginiADS 33E RotorcraftEmmanuelÎncă nu există evaluări
- Datasheet F404 FamilyDocument2 paginiDatasheet F404 FamilyhÎncă nu există evaluări
- Optimization: of Joined-Wing AircraftDocument10 paginiOptimization: of Joined-Wing AircraftSagar KulkarniÎncă nu există evaluări
- A Perspective On The Requirements and Design For Advanced Cruise MissilesDocument7 paginiA Perspective On The Requirements and Design For Advanced Cruise Missilesgrindormh53100% (1)
- Aircraft Conceptual Design - DraftDocument25 paginiAircraft Conceptual Design - DraftFrank Rubio CÎncă nu există evaluări
- Design and Analysis of Wing Fuselage AttachmentDocument6 paginiDesign and Analysis of Wing Fuselage AttachmentAbrahamJPulickalÎncă nu există evaluări
- Energy-Maneuverability MethodsDocument5 paginiEnergy-Maneuverability Methodsaleemsalman55Încă nu există evaluări
- A479056 PDFDocument37 paginiA479056 PDFkisariÎncă nu există evaluări
- Design and Analysis of The Main Assembly Jig For A Multirole Civilian Aircraft's Main DoorDocument6 paginiDesign and Analysis of The Main Assembly Jig For A Multirole Civilian Aircraft's Main DoorPrasanta Kumar SamalÎncă nu există evaluări
- Mil C 9084CDocument20 paginiMil C 9084CNick AlanenÎncă nu există evaluări
- Control Techniques of Tilt Rotor Unmanned Aerial Vehicle Systems A ReviewDocument18 paginiControl Techniques of Tilt Rotor Unmanned Aerial Vehicle Systems A Reviewchen4567Încă nu există evaluări
- Preliminary Design and Structural Analysis of Nose Landing Gear Oleo-Pneumatic Shock Absorber For Cessna 172S AircraftDocument56 paginiPreliminary Design and Structural Analysis of Nose Landing Gear Oleo-Pneumatic Shock Absorber For Cessna 172S AircraftTewelde WorkuÎncă nu există evaluări
- Design of Bomber Aircraft: Department of Aeronautical Engineering Gojan School of Business and TechnologyDocument51 paginiDesign of Bomber Aircraft: Department of Aeronautical Engineering Gojan School of Business and TechnologyThilak KumarÎncă nu există evaluări
- Accessory DrivesDocument2 paginiAccessory Drivesbassumudhol100% (1)
- Mettler Bernard 2000 1Document25 paginiMettler Bernard 2000 1sanjesh100% (1)
- 1107 02 MainDocument36 pagini1107 02 MainbganongÎncă nu există evaluări
- PC6 StolDocument14 paginiPC6 StolHtain WinÎncă nu există evaluări
- Flight Test #2 ReportDocument38 paginiFlight Test #2 ReportBsharrellÎncă nu există evaluări
- Section3 Flight TestDocument30 paginiSection3 Flight TestOmri AmayaÎncă nu există evaluări
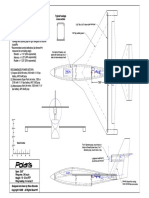
- Polaris Assembly Drawing (Nontiled) PDFDocument1 paginăPolaris Assembly Drawing (Nontiled) PDFSavu DanielÎncă nu există evaluări
- Autopilot HistoryDocument20 paginiAutopilot HistoryKamesh PrasadÎncă nu există evaluări
- Dassault Falcon 000dx Ex StructureDocument30 paginiDassault Falcon 000dx Ex StructureAB1984Încă nu există evaluări
- Hondajet BrochureDocument17 paginiHondajet BrochureranoÎncă nu există evaluări
- Performance Envelopes For Preliminary Sizing of Aircraft StructuresDocument257 paginiPerformance Envelopes For Preliminary Sizing of Aircraft StructuresRaghunandan BSÎncă nu există evaluări
- Swept WingsDocument4 paginiSwept WingsAmal JoyÎncă nu există evaluări
- Thank You.: Texstars, Inc. TEL: 972.647.1366 FAX: 972.641.2800Document24 paginiThank You.: Texstars, Inc. TEL: 972.647.1366 FAX: 972.641.2800Balwinder GherhaÎncă nu există evaluări
- SONEX Do SNX-W07-02 Squaring and Skinning The Wings InstructionDocument2 paginiSONEX Do SNX-W07-02 Squaring and Skinning The Wings InstructionNZHHÎncă nu există evaluări
- Landing Gear Design and DevelopmentDocument12 paginiLanding Gear Design and DevelopmentC V CHANDRASHEKARAÎncă nu există evaluări
- Avions Marcel Dassault: Maintenance ManualDocument4 paginiAvions Marcel Dassault: Maintenance ManualSergio VázquezÎncă nu există evaluări
- Aerodynamic Design Schemes of The Inlet Guide VaneDocument9 paginiAerodynamic Design Schemes of The Inlet Guide VanedbÎncă nu există evaluări
- Weapons ChecklistDocument8 paginiWeapons ChecklistAlejandro VelezÎncă nu există evaluări
- Compass Module Application Note PDFDocument8 paginiCompass Module Application Note PDFrokbraihan2Încă nu există evaluări
- Multhopp Method NASADocument81 paginiMulthopp Method NASAGabriel PiresÎncă nu există evaluări
- 30 - Hansen 110607 MACC BriefingDocument25 pagini30 - Hansen 110607 MACC BriefingMuhammad FayyadhÎncă nu există evaluări
- A Review On Bird Strike Capability On Service-Age Aircraft CanopyDocument14 paginiA Review On Bird Strike Capability On Service-Age Aircraft Canopytomzee1Încă nu există evaluări
- Speed Palmistry: by Pt. V.R SharmaDocument32 paginiSpeed Palmistry: by Pt. V.R Sharmasiev29Încă nu există evaluări
- Stress Course For Liasion EngineersDocument240 paginiStress Course For Liasion EngineersiorquizaÎncă nu există evaluări
- A Matlab Program To Study Gust Loading On A Simple Aircraft ModelDocument83 paginiA Matlab Program To Study Gust Loading On A Simple Aircraft Modelmohammadrezamadadi100% (5)
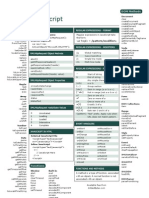
- Javascript Cheat SheetDocument1 paginăJavascript Cheat Sheetdanielle leigh100% (4)
- Corrosion and PreventionDocument2 paginiCorrosion and PreventionmukeshdtÎncă nu există evaluări
- Catia V5 R16 - Assembly DesignDocument551 paginiCatia V5 R16 - Assembly DesignHarsh100% (33)
- HHHHDocument1 paginăHHHHmukeshdtÎncă nu există evaluări
- TtpodDocument1 paginăTtpodmukeshdtÎncă nu există evaluări
- Simulating Drop Tests in Solidworks Software: White PaperDocument7 paginiSimulating Drop Tests in Solidworks Software: White Paperakhilesh120Încă nu există evaluări
- Topic 4: Classification, Properties and Applications of S.G. and C.G.Iron S.G.IRONDocument11 paginiTopic 4: Classification, Properties and Applications of S.G. and C.G.Iron S.G.IRONsandeep kumarÎncă nu există evaluări
- Course Syllabus - SIT CollegeDocument82 paginiCourse Syllabus - SIT CollegenagasundaramÎncă nu există evaluări
- SpringerwiennewyorkDocument579 paginiSpringerwiennewyorkNhân NguyễnÎncă nu există evaluări
- Vibration Isolation - Mounting SystemsDocument67 paginiVibration Isolation - Mounting Systemsnaveenmg201100% (1)
- Load-Bearing Glass StructuresDocument16 paginiLoad-Bearing Glass StructuresSocheata channÎncă nu există evaluări
- Fatigue of MetalsDocument54 paginiFatigue of MetalsMuhammad UreedÎncă nu există evaluări
- 1.1.1 Reinforced Concrete: ReinforcementDocument18 pagini1.1.1 Reinforced Concrete: ReinforcementiffahÎncă nu există evaluări
- Water Hammer FormingDocument7 paginiWater Hammer FormingHariÎncă nu există evaluări
- BSC FYP Thesis, by GL - Abu Bakar MalikDocument73 paginiBSC FYP Thesis, by GL - Abu Bakar Malikshahid aliÎncă nu există evaluări
- Structural Maintenance DocksideDocument35 paginiStructural Maintenance DocksidefjalzinaÎncă nu există evaluări
- 5.04 Sai Singh KhongrymmaiDocument27 pagini5.04 Sai Singh Khongrymmaij krishnanÎncă nu există evaluări
- Rankawat - Nonlinear Seismic Evaluation of Confined Masonry Structures Using Equivalent Truss ModelDocument18 paginiRankawat - Nonlinear Seismic Evaluation of Confined Masonry Structures Using Equivalent Truss ModelSergio Alonso SunleyÎncă nu există evaluări
- Bolt Clamping ForceDocument4 paginiBolt Clamping ForceGary YuenÎncă nu există evaluări
- Structural MasonryDocument309 paginiStructural MasonryFanis88% (8)
- In 738 Alloy Strain CharacteristicsDocument7 paginiIn 738 Alloy Strain CharacteristicsJJÎncă nu există evaluări
- Cispm MSDocument8 paginiCispm MSDacianMÎncă nu există evaluări
- Knuckle Joints DesignDocument10 paginiKnuckle Joints DesignKvrd Prasad100% (1)
- Etabs 2013Document26 paginiEtabs 2013laurentiu_paciogluÎncă nu există evaluări
- 1 s2.0 S0921509304006136 MainDocument5 pagini1 s2.0 S0921509304006136 MainVenkatesh PandianÎncă nu există evaluări
- Design Optimization of IC Engine Rocker-Arm Using Taguchi Based Design of ExperimentsDocument5 paginiDesign Optimization of IC Engine Rocker-Arm Using Taguchi Based Design of ExperimentsWylieÎncă nu există evaluări
- David Roylance - Mechanics of MaterialsDocument357 paginiDavid Roylance - Mechanics of MaterialsHezi HilikÎncă nu există evaluări
- Experimental Evaluation of Bamboo Reinforced Concrete Slab PanelsDocument9 paginiExperimental Evaluation of Bamboo Reinforced Concrete Slab PanelsAlemayehu Darge100% (1)
- Report For Suspension Design - Group - 12Document47 paginiReport For Suspension Design - Group - 12member2 mtriÎncă nu există evaluări
- CENG 5503: Design of Steel & Timber StructuresDocument37 paginiCENG 5503: Design of Steel & Timber StructuresBern Moses DuachÎncă nu există evaluări
- Enhancement of ECCS Design RecomendationDocument252 paginiEnhancement of ECCS Design Recomendationnoambar1Încă nu există evaluări
- Fracture Mechanic ACIDocument71 paginiFracture Mechanic ACIHarun AlrasyidÎncă nu există evaluări
- Foundation Design For A High Bay Warehouse With A Steel Fibre Reinforced Concrete SlabDocument13 paginiFoundation Design For A High Bay Warehouse With A Steel Fibre Reinforced Concrete SlabEstetika chinta PertiwiÎncă nu există evaluări
- CIGRE Vol1Document141 paginiCIGRE Vol1reinscÎncă nu există evaluări
- ASTM D4014 - Elastomeric BearingDocument7 paginiASTM D4014 - Elastomeric BearingLai DieuÎncă nu există evaluări