S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- 3D Model of Fuel Tank For System Simulation (En)Document78 pagini3D Model of Fuel Tank For System Simulation (En)BeaÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- J. David Powell, N.: P. Fekete, and Chen-Fang ChangDocument12 paginiJ. David Powell, N.: P. Fekete, and Chen-Fang Changdimoi6640Încă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Informed Trade in Spot Foreign Exchange MarketsDocument23 paginiInformed Trade in Spot Foreign Exchange Marketsdimoi6640Încă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- 08 Bubbles and Crashes - Eco525 - 17Document46 pagini08 Bubbles and Crashes - Eco525 - 17dimoi6640Încă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Hima16 SM 11Document53 paginiHima16 SM 11vahid teymooriÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- FPGA Implementation of CORDIC Processor: September 2013Document65 paginiFPGA Implementation of CORDIC Processor: September 2013lordaranorÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- JEE Class Companion Physics: Module-2Document7 paginiJEE Class Companion Physics: Module-2neoisonlyoneÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- EzIdentity MFA-TechnicalWriteupDocument20 paginiEzIdentity MFA-TechnicalWriteupVikram SareenÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Irodov Fundamental Laws of Mechanics PDFDocument139 paginiIrodov Fundamental Laws of Mechanics PDFsedanya67% (3)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Ojimc 2021 (Imo Mock)Document8 paginiOjimc 2021 (Imo Mock)NonuÎncă nu există evaluări
- 2-Angle Pair Relationships PDFDocument4 pagini2-Angle Pair Relationships PDFLeigh YahÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- p8 1c MiniaturetrainDocument10 paginip8 1c Miniaturetrainapi-249926147Încă nu există evaluări
- Course Notes MGT338 - Class 5Document3 paginiCourse Notes MGT338 - Class 5Luciene20Încă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- PQ - With - Id - PDF fkj1 PDFDocument17 paginiPQ - With - Id - PDF fkj1 PDFWorse To Worst SatittamajitraÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- FANUC Series 16i 18i 21i Expansion of Custom Macro Interface SignalDocument10 paginiFANUC Series 16i 18i 21i Expansion of Custom Macro Interface Signalmahdi elmayÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Liquid Holdup in PackedDocument11 paginiLiquid Holdup in PackedVictor VazquezÎncă nu există evaluări
- A Scheduling Approach For Ship Design Project With Fields Constraint in Tasks and Human ResourcesDocument6 paginiA Scheduling Approach For Ship Design Project With Fields Constraint in Tasks and Human ResourcesavciahmÎncă nu există evaluări
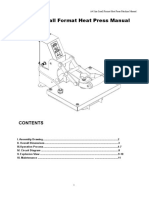
- A4 Heat Press Manual PDFDocument13 paginiA4 Heat Press Manual PDFmapache66Încă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Bunt Wall CalcualtionDocument2 paginiBunt Wall CalcualtionPowerand ControlÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Mba 09 41 Strategic Management - SyllabusDocument2 paginiMba 09 41 Strategic Management - SyllabusVinooj ViswanathanÎncă nu există evaluări
- Mean and Median.Document3 paginiMean and Median.shailesh100% (1)
- Playing With Blends in CoreldrawDocument12 paginiPlaying With Blends in CoreldrawZubairÎncă nu există evaluări
- James Bird Centrality and The Cities Chapters 2-4Document28 paginiJames Bird Centrality and The Cities Chapters 2-4Humberto DelgadoÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Sotoudeh Zahra 201108 PHDDocument110 paginiSotoudeh Zahra 201108 PHDnoneofyourbusineesÎncă nu există evaluări
- Design of Formed VesselDocument16 paginiDesign of Formed VesselTito FebriantoÎncă nu există evaluări
- Bike Talk KTH 2006Document66 paginiBike Talk KTH 2006jdpatel28Încă nu există evaluări
- Operations On FilesDocument12 paginiOperations On FilesVinayKumarSinghÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Equilibrium and Elasticity: Powerpoint Lectures ForDocument26 paginiEquilibrium and Elasticity: Powerpoint Lectures Forbarre PenroseÎncă nu există evaluări
- LG2 CryptographyDocument19 paginiLG2 CryptographyDr Patrick CernaÎncă nu există evaluări
- Machine Design - Spur GearsDocument5 paginiMachine Design - Spur GearsKleeanne Nicole UmpadÎncă nu există evaluări
- HANAtization Checklist v1.0Document14 paginiHANAtization Checklist v1.0topankajsharmaÎncă nu există evaluări
- Sr. No. A B C D Ans: Engineering Mechanics (2019 Pattern) Unit 2Document14 paginiSr. No. A B C D Ans: Engineering Mechanics (2019 Pattern) Unit 2Ajit MoreÎncă nu există evaluări
- Inductive and Deductive ReasoningDocument37 paginiInductive and Deductive ReasoningGadela KevinÎncă nu există evaluări
- Express LibraryDocument24 paginiExpress LibraryPrakhar SikarwarÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)