S-ar putea să vă placă și
- Iso 281:2007Document6 paginiIso 281:2007Daniel LiawÎncă nu există evaluări
- One Degree of Freedom, Harmonically Excited Vibrations: Forced Harmonic VibrationDocument15 paginiOne Degree of Freedom, Harmonically Excited Vibrations: Forced Harmonic VibrationUmair Mirza100% (1)
- Real Analysis and Probability: Solutions to ProblemsDe la EverandReal Analysis and Probability: Solutions to ProblemsÎncă nu există evaluări
- Microsoft PowerPoint 2010 TutorialDocument10 paginiMicrosoft PowerPoint 2010 Tutorialchronos65340% (1)
- Blessings of The Cross PDFDocument48 paginiBlessings of The Cross PDFZwesty Rimba100% (2)
- Rayleigh Ritz MethodDocument7 paginiRayleigh Ritz Methodrameshbabu_197963% (8)
- Vibrations in Engineering: Faculty of Civil Engineering and Applied MechanicsDocument133 paginiVibrations in Engineering: Faculty of Civil Engineering and Applied Mechanicsvuhoangdai90Încă nu există evaluări
- Vibration Under General Forcing ConditionsDocument48 paginiVibration Under General Forcing ConditionsEpimerianos AberianosÎncă nu există evaluări
- DC1 Guide To Dark Conspiracy (1st Edition) (2085857)Document10 paginiDC1 Guide To Dark Conspiracy (1st Edition) (2085857)James StevensÎncă nu există evaluări
- Final Demo A Detailed Lesson Plan in Math 1Document8 paginiFinal Demo A Detailed Lesson Plan in Math 1Brenda PelicanoÎncă nu există evaluări
- 7 Steps IAPDocument61 pagini7 Steps IAPCdrrmc DigosÎncă nu există evaluări
- Life Cycle of GISDocument12 paginiLife Cycle of GISNikin JayswalÎncă nu există evaluări
- Control Systems II Course OverviewDocument78 paginiControl Systems II Course Overview34plt34Încă nu există evaluări
- Continuous and Discrete Time Signals and Systems (Mandal & Asif) Solutions - Chap02Document36 paginiContinuous and Discrete Time Signals and Systems (Mandal & Asif) Solutions - Chap02Lyubomir Hristov91% (11)
- Translation Mechanical System Transfer FunctionDocument28 paginiTranslation Mechanical System Transfer FunctionMichael MagpantayÎncă nu există evaluări
- 3850 Mathematics Stage 3 Marking Guide Sample 2Document1 pagină3850 Mathematics Stage 3 Marking Guide Sample 2AshleeGedeliahÎncă nu există evaluări
- AppendixC 2012Document6 paginiAppendixC 2012Daniel LiawÎncă nu există evaluări
- Signals Systems Question PaperDocument14 paginiSignals Systems Question PaperCoeus Apollo100% (1)
- Nbody DissipativeDocument44 paginiNbody DissipativeFulana SchlemihlÎncă nu există evaluări
- Elementary Tutorial: Fundamentals of Linear VibrationsDocument51 paginiElementary Tutorial: Fundamentals of Linear VibrationsfujinyuanÎncă nu există evaluări
- Lagrange's Equations and Variational PrinciplesDocument11 paginiLagrange's Equations and Variational PrinciplesBrennan MaceÎncă nu există evaluări
- Applications of Finite Element Method To Scalar Transport ProblemsDocument5 paginiApplications of Finite Element Method To Scalar Transport ProblemsSaumya SinhaÎncă nu există evaluări
- App PDEDocument83 paginiApp PDEbmandarÎncă nu există evaluări
- Mechanical-Electrical Analogy ModelsDocument3 paginiMechanical-Electrical Analogy Modelsmssaber77Încă nu există evaluări
- HD 6 Numerical Integration of SDOF 2008Document17 paginiHD 6 Numerical Integration of SDOF 2008concord1103Încă nu există evaluări
- Ufabccapitulo 1Document121 paginiUfabccapitulo 1Leonardo De Avellar FredericoÎncă nu există evaluări
- Chapter 2 - Mathematical ModellingDocument84 paginiChapter 2 - Mathematical ModellingDyrul SyaznanÎncă nu există evaluări
- Notes LT3Document12 paginiNotes LT3veteron56Încă nu există evaluări
- FALLSEM2013-14 CP1806 30-Oct-2013 RM01 II OptimalControl UploadedDocument10 paginiFALLSEM2013-14 CP1806 30-Oct-2013 RM01 II OptimalControl UploadedRajat Kumar SinghÎncă nu există evaluări
- Classnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityDocument51 paginiClassnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityGürkan YamanÎncă nu există evaluări
- Applications of Hamilton's Principle and Euler-Lagrange Equations for Continuum BarsDocument12 paginiApplications of Hamilton's Principle and Euler-Lagrange Equations for Continuum BarsGeof180Încă nu există evaluări
- Vibration of Single Degree of Freedom SystemDocument31 paginiVibration of Single Degree of Freedom SystemEnriqueGDÎncă nu există evaluări
- Assignment CoverpageDocument12 paginiAssignment Coverpageajay shresthaÎncă nu există evaluări
- Physics problem solutionsDocument8 paginiPhysics problem solutionsserkansancakÎncă nu există evaluări
- Lagrange's Equations: T X B T F T KX T FDocument8 paginiLagrange's Equations: T X B T F T KX T FccÎncă nu există evaluări
- Error FunDocument10 paginiError FunIkram Ben SalemÎncă nu există evaluări
- Fundamentals of Vibration TheoryDocument11 paginiFundamentals of Vibration TheoryKavya M BhatÎncă nu există evaluări
- 316s Answer10 PDFDocument3 pagini316s Answer10 PDFjisteeleÎncă nu există evaluări
- Vibration Analysis of Forced Harmonic OscillationDocument19 paginiVibration Analysis of Forced Harmonic OscillationRakesh BhaskerÎncă nu există evaluări
- Chapter 1Document8 paginiChapter 1hitesh89Încă nu există evaluări
- Chapter-6: Energy Method (Lagrange's Method)Document35 paginiChapter-6: Energy Method (Lagrange's Method)ideepujÎncă nu există evaluări
- Dynamic Response of Second Order Mechanical Systems: Handout #2a (Pp. 1-39)Document39 paginiDynamic Response of Second Order Mechanical Systems: Handout #2a (Pp. 1-39)Oliver KrausÎncă nu există evaluări
- Mathematical Modeling of Mechanical Systems and Electrical SystemsDocument49 paginiMathematical Modeling of Mechanical Systems and Electrical SystemsMary DunhamÎncă nu există evaluări
- LAPLACE TRANSFORM CIRCUIT ANALYSISDocument56 paginiLAPLACE TRANSFORM CIRCUIT ANALYSISSando CrisiasaÎncă nu există evaluări
- HhjkaDocument22 paginiHhjkaAshenafi AbuyeÎncă nu există evaluări
- 3 SLAjitprasadDocument17 pagini3 SLAjitprasadJaya JvÎncă nu există evaluări
- Ps 4 SolDocument23 paginiPs 4 SolEmÎncă nu există evaluări
- PH2130C 2006 Exam PaperaDocument7 paginiPH2130C 2006 Exam PaperabbteenagerÎncă nu există evaluări
- Fluid Systems State EquationsPipe 1R1Tank 2BPipe 2R2Pipe 3R3Document10 paginiFluid Systems State EquationsPipe 1R1Tank 2BPipe 2R2Pipe 3R3JulienBapÎncă nu există evaluări
- Modeling in The Frequency Domain: Prof. Ju-Jang LeeDocument32 paginiModeling in The Frequency Domain: Prof. Ju-Jang LeeMohammad HassanÎncă nu există evaluări
- 1 Free Vibration Damping For ClassDocument22 pagini1 Free Vibration Damping For ClassAshok JohnÎncă nu există evaluări
- University of Mauritius: December 2008Document4 paginiUniversity of Mauritius: December 2008Damree EmirÎncă nu există evaluări
- Abstract. We Extend The Applicability of The Kantorovich Theorem (KT) ForDocument8 paginiAbstract. We Extend The Applicability of The Kantorovich Theorem (KT) ForPaco DamianÎncă nu există evaluări
- INTRODUCTION TO DYNAMIC ANALYSIS OF SIMPLE STRUCTURESDocument37 paginiINTRODUCTION TO DYNAMIC ANALYSIS OF SIMPLE STRUCTURESyuchunieÎncă nu există evaluări
- Output-Feedback Stabilization of Stochastic Nonlinear Systems Driven by Noise of Unknown CovarianceDocument10 paginiOutput-Feedback Stabilization of Stochastic Nonlinear Systems Driven by Noise of Unknown CovarianceEva KaslikÎncă nu există evaluări
- Ch2-Energy Conservation PDFDocument28 paginiCh2-Energy Conservation PDFSarvesh KanaujiaÎncă nu există evaluări
- Final Formula SheetDocument3 paginiFinal Formula SheetwhatnononoÎncă nu există evaluări
- Some Basic Formulae:: Quadratic FormulaDocument6 paginiSome Basic Formulae:: Quadratic FormulaBlazingStudiosÎncă nu există evaluări
- ME4213 Tutorial 2aDocument4 paginiME4213 Tutorial 2aLinShaodun100% (1)
- EE 351 Spring 2021 Homework 1 SolutionsDocument4 paginiEE 351 Spring 2021 Homework 1 SolutionsKalenÎncă nu există evaluări
- Sdof DynDocument29 paginiSdof DynAnkur KurmiÎncă nu există evaluări
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeDe la EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeÎncă nu există evaluări
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesDe la EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesÎncă nu există evaluări
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)De la EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Încă nu există evaluări
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesDe la EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesÎncă nu există evaluări
- More About Plastics: (Continued On Following Page)Document3 paginiMore About Plastics: (Continued On Following Page)Daniel LiawÎncă nu există evaluări
- More About Plastics: (Continued On Following Page)Document3 paginiMore About Plastics: (Continued On Following Page)Daniel LiawÎncă nu există evaluări
- Physics 2016 Curriculum Data BookletDocument15 paginiPhysics 2016 Curriculum Data Bookletrayban262Încă nu există evaluări
- Chemical Resistance Guide CPVCDocument22 paginiChemical Resistance Guide CPVCEsteban David Mena AriasÎncă nu există evaluări
- More About Plastics: (Continued On Following Page)Document3 paginiMore About Plastics: (Continued On Following Page)Daniel LiawÎncă nu există evaluări
- FlawlessDocument1 paginăFlawlessDaniel LiawÎncă nu există evaluări
- Displacement and Velocity MeasurementDocument8 paginiDisplacement and Velocity MeasurementDaniel LiawÎncă nu există evaluări
- Smoothly Does It: Case StudyDocument2 paginiSmoothly Does It: Case StudyDaniel LiawÎncă nu există evaluări
- Delrin AFDocument2 paginiDelrin AFDaniel LiawÎncă nu există evaluări
- Instrumentation ElectronicsDocument8 paginiInstrumentation ElectronicsDaniel LiawÎncă nu există evaluări
- Test Plan and CalibrationDocument8 paginiTest Plan and CalibrationDaniel LiawÎncă nu există evaluări
- Smoothly Does It: Case StudyDocument2 paginiSmoothly Does It: Case StudyDaniel LiawÎncă nu există evaluări
- Temperature MeasurementDocument7 paginiTemperature MeasurementDaniel LiawÎncă nu există evaluări
- AppendixB 2013Document3 paginiAppendixB 2013Daniel LiawÎncă nu există evaluări
- Strain ForceDocument6 paginiStrain ForceDaniel LiawÎncă nu există evaluări
- Digital Signals and DAQDocument12 paginiDigital Signals and DAQDaniel LiawÎncă nu există evaluări
- Mechanical Engineering vs Engineering Physics ProgramsDocument4 paginiMechanical Engineering vs Engineering Physics ProgramsDaniel LiawÎncă nu există evaluări
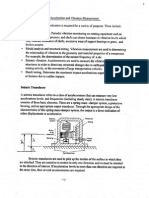
- Acceleration and VibrationDocument6 paginiAcceleration and VibrationDaniel LiawÎncă nu există evaluări
- AppendixF USES of FRF 2012Document13 paginiAppendixF USES of FRF 2012ettypasewangÎncă nu există evaluări
- Passion Digital BookletDocument10 paginiPassion Digital BookletDaniel LiawÎncă nu există evaluări
- Conservation of Mechanical Energy, Linear MomentumDocument6 paginiConservation of Mechanical Energy, Linear MomentumDaniel LiawÎncă nu există evaluări
- Appendix D 2008Document14 paginiAppendix D 2008Daniel LiawÎncă nu există evaluări
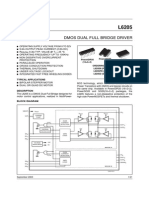
- L6205 Data SheetDocument21 paginiL6205 Data SheetDaniel LiawÎncă nu există evaluări
- SkyTrain SysDocument1 paginăSkyTrain SysSara NiuÎncă nu există evaluări
- Passion Digital BookletDocument10 paginiPassion Digital BookletDaniel LiawÎncă nu există evaluări
- My Lesson Plan in Computer HardwareDocument6 paginiMy Lesson Plan in Computer HardwareSeiji PosaÎncă nu există evaluări
- ROHR2 InterfacesDocument16 paginiROHR2 InterfacesMarcia Akutsu MainardiÎncă nu există evaluări
- Harvard Negotiation Insight Initiative Program on Negotiation at Harvard Law School Summer Learning Forum The EnneagramDocument1 paginăHarvard Negotiation Insight Initiative Program on Negotiation at Harvard Law School Summer Learning Forum The EnneagramRay GurdÎncă nu există evaluări
- Standard Equations of Motion For Submarine Simulation: Graul R. LhgenDocument42 paginiStandard Equations of Motion For Submarine Simulation: Graul R. LhgenVamsi GuptaÎncă nu există evaluări
- Prof. Vlado Šakić - Rat U BiH 1991. - 1995.Document241 paginiProf. Vlado Šakić - Rat U BiH 1991. - 1995.Bistrica87Încă nu există evaluări
- Nilsen J Top 4000 Vocabulary Test For ThaiDocument9 paginiNilsen J Top 4000 Vocabulary Test For ThaiplopÎncă nu există evaluări
- Opera Rus MandrivaDocument118 paginiOpera Rus Mandrivaapi-3837985Încă nu există evaluări
- Costco Cover Letter ExamplesDocument6 paginiCostco Cover Letter Examplesxwxxoyvhf100% (1)
- Rudy and Grusec 2006 PDFDocument11 paginiRudy and Grusec 2006 PDFMuhammad NabeelÎncă nu există evaluări
- The - Belly - Book - A - Nine-Month - Journal 253 - For PDFDocument3 paginiThe - Belly - Book - A - Nine-Month - Journal 253 - For PDFShyam ParsanaÎncă nu există evaluări
- Plagiarism: Giving Credit Where Credit Is DueDocument16 paginiPlagiarism: Giving Credit Where Credit Is DueAshish GuptaÎncă nu există evaluări
- Chips-Maintenance InformatiqueDocument11 paginiChips-Maintenance InformatiqueFOUAD EL BRAHMI100% (1)
- Google Syllabus: Logical Reasoning Verbal ReasoningDocument4 paginiGoogle Syllabus: Logical Reasoning Verbal ReasoningMohit PrajapatÎncă nu există evaluări
- Mario Tamitles Coloma JR.: POSITION DESIRE: Structural Welder/S.M.A.W/F.C.A.W ObjectivesDocument3 paginiMario Tamitles Coloma JR.: POSITION DESIRE: Structural Welder/S.M.A.W/F.C.A.W ObjectivesJune Kenneth MarivelesÎncă nu există evaluări
- Data Science CodealphaDocument11 paginiData Science CodealphaSharef Eddine ArarÎncă nu există evaluări
- TEC-1123 Datasheet 5144GDocument7 paginiTEC-1123 Datasheet 5144GSofyan AndikaÎncă nu există evaluări
- Yogesh Kumar Garg Resume Mechanical EngineerDocument3 paginiYogesh Kumar Garg Resume Mechanical EngineerYogeshGargÎncă nu există evaluări
- Quality Assurance in BacteriologyDocument28 paginiQuality Assurance in BacteriologyAuguz Francis Acena50% (2)
- Week 1 2 EstimationDocument71 paginiWeek 1 2 EstimationGerad TeoÎncă nu există evaluări
- (ENGL2112) Week 012-Course ModuleDocument3 pagini(ENGL2112) Week 012-Course ModuleKaraÎncă nu există evaluări
- Nihilism's Challenge to Meaning and ValuesDocument2 paginiNihilism's Challenge to Meaning and ValuesancorsaÎncă nu există evaluări
- Koolhaas SpotCheckConversation 1999Document21 paginiKoolhaas SpotCheckConversation 1999Lijani GriesselÎncă nu există evaluări
- KART STEERING SYSTEM OPTIMIZATION AND SIMULATIONDocument7 paginiKART STEERING SYSTEM OPTIMIZATION AND SIMULATIONgame_freakerboy_8346Încă nu există evaluări