S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- 74HC HCT299Document24 pagini74HC HCT299rajivsharma1610Încă nu există evaluări
- OxidationDocument19 paginiOxidationrajivsharma1610Încă nu există evaluări
- SRAMDocument22 paginiSRAMrajivsharma1610Încă nu există evaluări
- LPDDR4 SDRAM Controller CoreDocument1 paginăLPDDR4 SDRAM Controller Corerajivsharma1610Încă nu există evaluări
- Mos, Cmos, Transmission GatesDocument17 paginiMos, Cmos, Transmission GatesSynthiya VinothiniÎncă nu există evaluări
- TCL BASICSDocument12 paginiTCL BASICSrajivsharma1610Încă nu există evaluări
- Verilog ExampleDocument41 paginiVerilog ExampleReddaiah YedotiÎncă nu există evaluări
- Memory BasicsDocument25 paginiMemory Basicsrajivsharma1610Încă nu există evaluări
- CDesignerDocument506 paginiCDesignerrajivsharma1610100% (2)
- 02 Adder 11Document13 pagini02 Adder 11Yermakov Vadim IvanovichÎncă nu există evaluări
- Cadence Tut 1, Cadence TutorialDocument91 paginiCadence Tut 1, Cadence Tutorialrajivsharma1610Încă nu există evaluări
- VFTF09Document60 paginiVFTF09rajivsharma1610Încă nu există evaluări
- Exam Notice Ese EnglishDocument8 paginiExam Notice Ese EnglishMyameSirameÎncă nu există evaluări
- Tutorial 2Document12 paginiTutorial 2shuddhasattwaÎncă nu există evaluări
- LM 181102Document86 paginiLM 181102rajivsharma1610Încă nu există evaluări
- CDesignerDocument506 paginiCDesignerrajivsharma1610100% (2)
- BE ETC Syllabus 2012 Course Revised SyllabusDocument61 paginiBE ETC Syllabus 2012 Course Revised Syllabusaniket5941Încă nu există evaluări
- Master Matlab Fundamentals for Image ProcessingDocument18 paginiMaster Matlab Fundamentals for Image ProcessingdansileshiÎncă nu există evaluări
- Questa Getting StartedDocument12 paginiQuesta Getting StartedSanjai RadhakrishnanÎncă nu există evaluări
- Image Import, Processing & Export in MATLABDocument5 paginiImage Import, Processing & Export in MATLABrajivsharma1610Încă nu există evaluări
- Verilog ExampleDocument41 paginiVerilog ExampleReddaiah YedotiÎncă nu există evaluări
- Sta 9 1Document125 paginiSta 9 1Jayaprakash Polimetla100% (1)
- Draft Copy of BE (E & TC) Proposed Syllabus Wef AY 2015-16Document59 paginiDraft Copy of BE (E & TC) Proposed Syllabus Wef AY 2015-16contrasterÎncă nu există evaluări
- Prekidačka NapajanjaDocument48 paginiPrekidačka NapajanjaDamir PranjkovicÎncă nu există evaluări
- TE - E & TC - Syllabus 2012 CourseDocument48 paginiTE - E & TC - Syllabus 2012 Courseaniket5941Încă nu există evaluări
- High Uniformity Monolithic 1x4 CouplersDocument15 paginiHigh Uniformity Monolithic 1x4 Couplersrajivsharma1610Încă nu există evaluări
- Static Timing AnalysisDocument32 paginiStatic Timing Analysisrajivsharma1610Încă nu există evaluări
- 3-Dimensional Analysis On The GIDL Current of Body-Tied Triple Gate FinFETDocument4 pagini3-Dimensional Analysis On The GIDL Current of Body-Tied Triple Gate FinFETMyunghwan RyuÎncă nu există evaluări
- VHDL FSM TutorialDocument8 paginiVHDL FSM TutorialSalah-Eddine NasmiÎncă nu există evaluări
- Quick Union Reference Tables: Pressure Control EquipmentDocument1 paginăQuick Union Reference Tables: Pressure Control EquipmentMiguel FÎncă nu există evaluări
- Multiple-Choice QuestionsDocument8 paginiMultiple-Choice Questionsvijayganesh pinisettiÎncă nu există evaluări
- Optimal Design & Operation of RO Systems 3-Day SeminarDocument10 paginiOptimal Design & Operation of RO Systems 3-Day SeminarasankandessÎncă nu există evaluări
- Verilog Interview Questions & AnswersDocument6 paginiVerilog Interview Questions & AnswersKrishna Saroja SankaÎncă nu există evaluări
- Wind Load CompututationsDocument31 paginiWind Load Compututationskim suarezÎncă nu există evaluări
- FTS ScaleoEUserManualEN 10 1082177Document2.044 paginiFTS ScaleoEUserManualEN 10 1082177JÎncă nu există evaluări
- Mechanical Testing of MaterialsDocument38 paginiMechanical Testing of MaterialsAanand Rishabh DagaÎncă nu există evaluări
- Sasirekha Computer ProjectDocument90 paginiSasirekha Computer ProjectAkurati RupendraÎncă nu există evaluări
- Phase Diagrams IntroductionDocument76 paginiPhase Diagrams IntroductionGikiTopiÎncă nu există evaluări
- 3M Cold Shrink Cable Joints MV HV 11kV 33kV 66kV BrochureDocument4 pagini3M Cold Shrink Cable Joints MV HV 11kV 33kV 66kV BrochureMohammed MustafaÎncă nu există evaluări
- Ejercicios Propuestos Temas Hasta Primer PrevioDocument2 paginiEjercicios Propuestos Temas Hasta Primer PrevioJuan De DiosÎncă nu există evaluări
- Introduction to Generators, Protection Schemes, Relays and MaintenanceDocument44 paginiIntroduction to Generators, Protection Schemes, Relays and MaintenancerahulNrana100% (1)
- Elink For Windows: List of Pages in This Trip KitDocument130 paginiElink For Windows: List of Pages in This Trip KitAhmed GvÎncă nu există evaluări
- Belgas P630R IOMDocument3 paginiBelgas P630R IOMSMcÎncă nu există evaluări
- Axle, Front - Differential and Carrier - Jee0123251Document3 paginiAxle, Front - Differential and Carrier - Jee0123251Husi NihaÎncă nu există evaluări
- Physicaltestingofrubberrogerbrown2006 Book 150514103634 Lva1 App6892Document389 paginiPhysicaltestingofrubberrogerbrown2006 Book 150514103634 Lva1 App6892AbdelhamidHarratÎncă nu există evaluări
- Tractor 2017 Catalogue WebDocument36 paginiTractor 2017 Catalogue WebAnonymous 1XBCMXÎncă nu există evaluări
- ATS1801 - Interface PC - ImpDocument8 paginiATS1801 - Interface PC - ImpluismantonioÎncă nu există evaluări
- 59-Form and Plot Frame Editor PDFDocument70 pagini59-Form and Plot Frame Editor PDFAries TsaiÎncă nu există evaluări
- Fire Drencher System - Base-Engineer PDFDocument2 paginiFire Drencher System - Base-Engineer PDFpequenita34100% (1)
- Ricoh 2090Document832 paginiRicoh 2090cosmin176100% (1)
- WWW - Incar.tw-Kobelco SK 75 Service ManualDocument5 paginiWWW - Incar.tw-Kobelco SK 75 Service Manualpurnomo0% (1)
- Chapter 15. Applications of Integration: Exercises 15.2Document2 paginiChapter 15. Applications of Integration: Exercises 15.2Donghyun AhnÎncă nu există evaluări
- E380b PDFDocument12 paginiE380b PDFanaÎncă nu există evaluări
- Abbreviations Plumbing Symbols: Fort Worth DistrictDocument21 paginiAbbreviations Plumbing Symbols: Fort Worth DistrictDenzel NgÎncă nu există evaluări
- 06 - 1 Cutting Tools - 2013 - LRDocument17 pagini06 - 1 Cutting Tools - 2013 - LRBaggerkingÎncă nu există evaluări
- Electrical Measurements and InstrumentationDocument17 paginiElectrical Measurements and InstrumentationRinita Datta100% (1)
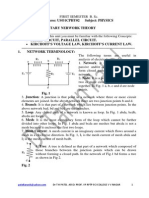
- Us01cphy02 Unit 1 2014 THPDocument18 paginiUs01cphy02 Unit 1 2014 THPapi-264723824Încă nu există evaluări
- Infiltration Ventilation LeakageDocument42 paginiInfiltration Ventilation LeakageBulut YildizÎncă nu există evaluări
- TF Section - MICET 2016Document21 paginiTF Section - MICET 2016Eddie D SouzaÎncă nu există evaluări