S-ar putea să vă placă și
- Plano Electrico 1HLDocument2 paginiPlano Electrico 1HLRamon Hidalgo100% (1)
- Af0zp0ba (COMBIAC2-ing) PDFDocument65 paginiAf0zp0ba (COMBIAC2-ing) PDFtaurusÎncă nu există evaluări
- Differential Forms on Electromagnetic NetworksDe la EverandDifferential Forms on Electromagnetic NetworksEvaluare: 4 din 5 stele4/5 (1)
- 2011 Design and Construction of Axial Flux Permanent Magnet Generator For Wind Turbine Generated DC Voltage at Rated Power 1500 W (Office)Document4 pagini2011 Design and Construction of Axial Flux Permanent Magnet Generator For Wind Turbine Generated DC Voltage at Rated Power 1500 W (Office)Fazal Karim Mahsud100% (1)
- A STUDY ON DETERMINATION OF PARAMETERS FOR PERMANENT MAGNET SynchroDocument6 paginiA STUDY ON DETERMINATION OF PARAMETERS FOR PERMANENT MAGNET SynchroGrettel QuintanaÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- Method of Clean Earthing or Grounding in Electrical SystemDocument10 paginiMethod of Clean Earthing or Grounding in Electrical System김윤식100% (1)
- 4143314-Instant Download Triumph Bonneville T100 Repair ManualDocument482 pagini4143314-Instant Download Triumph Bonneville T100 Repair Manualnerak999986% (36)
- Permanent Magnet Synchronous MachineDocument7 paginiPermanent Magnet Synchronous MachineSantiago DavidÎncă nu există evaluări
- Comparison of DTC and FOCDocument5 paginiComparison of DTC and FOCJuseverck JuniorÎncă nu există evaluări
- A High-Efficiency PM-Assisted Synchronous Reluctance Motor DriveDocument6 paginiA High-Efficiency PM-Assisted Synchronous Reluctance Motor DrivejalilemadiÎncă nu există evaluări
- Modeling of Permanent Magnet Motor Drives: Ieee Transactions On Industrial Electronics, Vol. NO 4, NovemberDocument5 paginiModeling of Permanent Magnet Motor Drives: Ieee Transactions On Industrial Electronics, Vol. NO 4, NovemberMeena RamÎncă nu există evaluări
- DQ InductanceDocument11 paginiDQ Inductancegthulasi789193Încă nu există evaluări
- A STUDY ON DETERMINATION OF PARAMETERS FOR PERMANENT MAGNET Synchro PDFDocument6 paginiA STUDY ON DETERMINATION OF PARAMETERS FOR PERMANENT MAGNET Synchro PDFPolo DelgadoÎncă nu există evaluări
- Arindam Seminar 11Document6 paginiArindam Seminar 11Arindam BhattacharjeeÎncă nu există evaluări
- Iust v7n4p241Document8 paginiIust v7n4p241Reshmi Parikal RaghavanÎncă nu există evaluări
- 15 - ISSN - 1392-1215 - Investigation of Effects of Rotor Pole Geometry and Permanent Magnet To Line Start Permanent Magnet Synchronous Motors EfficiencyDocument6 pagini15 - ISSN - 1392-1215 - Investigation of Effects of Rotor Pole Geometry and Permanent Magnet To Line Start Permanent Magnet Synchronous Motors EfficiencykfaliÎncă nu există evaluări
- Analysis of Detent Torque in Hybrid Stepping Motors: Jonathan U AgberDocument7 paginiAnalysis of Detent Torque in Hybrid Stepping Motors: Jonathan U AgbertheijesÎncă nu există evaluări
- Dynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelDocument5 paginiDynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelenmnabilÎncă nu există evaluări
- Synchronous Motor ThesisDocument6 paginiSynchronous Motor Thesissandyharwellevansville100% (2)
- Improved Design For Reduction of Torque Ripple of Brushless DC MotorDocument4 paginiImproved Design For Reduction of Torque Ripple of Brushless DC MotorPhạm Văn TưởngÎncă nu există evaluări
- Optimal Design of Interior Permanent Magnet - Lee - 2013Document6 paginiOptimal Design of Interior Permanent Magnet - Lee - 2013Maycon MaranÎncă nu există evaluări
- Dps Module3 NoteDocument8 paginiDps Module3 NoteDivya BabuÎncă nu există evaluări
- Efficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsDocument7 paginiEfficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsNeeraj GahlainÎncă nu există evaluări
- Simulation Modelling Practice and Theory: Abdallah Barakat, Slim Tnani, Gérard Champenois, Emile MouniDocument15 paginiSimulation Modelling Practice and Theory: Abdallah Barakat, Slim Tnani, Gérard Champenois, Emile Mounigurunathan14Încă nu există evaluări
- Simulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelDocument7 paginiSimulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelPabloNalogowskiÎncă nu există evaluări
- Shi Guobiao, Zhao Songhui, Min JunDocument6 paginiShi Guobiao, Zhao Songhui, Min JunnajibÎncă nu există evaluări
- A Permanent Magnet Synchronous Motor Traction Applications Electric VehiclesDocument7 paginiA Permanent Magnet Synchronous Motor Traction Applications Electric VehiclesJavad Rahmany FardÎncă nu există evaluări
- Normalized Dynamic Simulation of 3-Phase Induction Motor Using Matlab/SimulinkDocument6 paginiNormalized Dynamic Simulation of 3-Phase Induction Motor Using Matlab/SimulinkMallikarjunBhiradeÎncă nu există evaluări
- SIMULATION MODEL of Permanent Magnet Synchronous MotorDocument9 paginiSIMULATION MODEL of Permanent Magnet Synchronous MotorSri MathiÎncă nu există evaluări
- Induction Motor FattynessDocument6 paginiInduction Motor FattynessMuhammad Ali Masood CheemaÎncă nu există evaluări
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 paginiSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيÎncă nu există evaluări
- Electromagnetic Design of SynchronousDocument6 paginiElectromagnetic Design of SynchronousedumacerenÎncă nu există evaluări
- Two PH IM Old 2004Document9 paginiTwo PH IM Old 2004srilakshmisiriÎncă nu există evaluări
- Induction Motor Equivalent Circuit For Dynamic SimulationDocument6 paginiInduction Motor Equivalent Circuit For Dynamic Simulationmareymorsy2822Încă nu există evaluări
- IEEE Transactions On Conversion, Vol. 8, No. 1, 1993Document7 paginiIEEE Transactions On Conversion, Vol. 8, No. 1, 1993doud98Încă nu există evaluări
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocument5 paginiAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaÎncă nu există evaluări
- 404 Vol. Reference Frame Analysis of A Slip Energy Recovery SystemDocument5 pagini404 Vol. Reference Frame Analysis of A Slip Energy Recovery SystemApekshit BhowateÎncă nu există evaluări
- A Comparison of Power Density For Axial Flux Machines Based On General Purpose Sizing EquationsDocument8 paginiA Comparison of Power Density For Axial Flux Machines Based On General Purpose Sizing EquationsMostafa AhmadiÎncă nu există evaluări
- Design and Simulation of Field Oriented Control of VSI Fed Induction Motor DriveDocument10 paginiDesign and Simulation of Field Oriented Control of VSI Fed Induction Motor Drivesuhail ahmadÎncă nu există evaluări
- Steady State Analysis of PMSG PDFDocument16 paginiSteady State Analysis of PMSG PDF1balamanianÎncă nu există evaluări
- Simulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab MethodsDocument4 paginiSimulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab Methodsபொன்னியின் செல்வன்Încă nu există evaluări
- 7 - 2017 Prediction of Losses and Efficiency For Three-Phase Induction Machines Equipped With Combined Star-Delta WindingsDocument9 pagini7 - 2017 Prediction of Losses and Efficiency For Three-Phase Induction Machines Equipped With Combined Star-Delta WindingsAnonymous Nyv3dRÎncă nu există evaluări
- Simulation and Analysis of Modified DTC of PMSMDocument10 paginiSimulation and Analysis of Modified DTC of PMSMpreetivermaeeeÎncă nu există evaluări
- Elementary Analysis of Segmental StatorDocument7 paginiElementary Analysis of Segmental StatordafÎncă nu există evaluări
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument5 paginiIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)Încă nu există evaluări
- Très Important - Dimensionnement D2LDocument8 paginiTrès Important - Dimensionnement D2LSafaAffiÎncă nu există evaluări
- Nonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorDocument6 paginiNonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorAkshay ArksaliÎncă nu există evaluări
- Modelling of Induction Machines For Electric DrivesDocument6 paginiModelling of Induction Machines For Electric DrivesItipun SakunwanthanasakÎncă nu există evaluări
- A CD Rive Final StrategyDocument4 paginiA CD Rive Final Strategyjiwani87Încă nu există evaluări
- Park's Vector Approach For Online Fault Diagnosis of Induction MotorDocument7 paginiPark's Vector Approach For Online Fault Diagnosis of Induction Motoritcmiguel100% (1)
- Dd6da66a 33a3 410F A2e4 4ad5ce71d30fDocument7 paginiDd6da66a 33a3 410F A2e4 4ad5ce71d30fmarris09Încă nu există evaluări
- Magnetic Models of Saturated Interior Permanent Magnet Motors Based On FEADocument8 paginiMagnetic Models of Saturated Interior Permanent Magnet Motors Based On FEAomokhafeÎncă nu există evaluări
- Horizontal Axis Wind Turbine Working at Maximum Power Coefficient ContinuouslyDocument6 paginiHorizontal Axis Wind Turbine Working at Maximum Power Coefficient ContinuouslyLiviu MateescuÎncă nu există evaluări
- Design of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerDocument3 paginiDesign of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerhooshyarÎncă nu există evaluări
- Speed Control of Induction Motor Fed From Wind Turbine Via Particle Swarm Optimization Based PI ControllerDocument13 paginiSpeed Control of Induction Motor Fed From Wind Turbine Via Particle Swarm Optimization Based PI ControllerHanan MouchtakiriÎncă nu există evaluări
- Jjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorDocument6 paginiJjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorhassenbbÎncă nu există evaluări
- SIMULATION MODEL of Permanent Magnet Synchronous MotorDocument9 paginiSIMULATION MODEL of Permanent Magnet Synchronous MotorSri MathiÎncă nu există evaluări
- Direct Torque Control of Symmetrical and Asymmetrical Single Phase Induction MotorDocument4 paginiDirect Torque Control of Symmetrical and Asymmetrical Single Phase Induction MotorBook4AllÎncă nu există evaluări
- Finite-Element Models For Electrical Machines by HennebergerDocument12 paginiFinite-Element Models For Electrical Machines by HennebergermuhassadiÎncă nu există evaluări
- Modeling and Control of Hybrid Stepping MotorsDocument6 paginiModeling and Control of Hybrid Stepping MotorsMeriam BadriÎncă nu există evaluări
- Pspice Simulation of SPIMDocument7 paginiPspice Simulation of SPIMMohammad SubhanÎncă nu există evaluări
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDe la EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkÎncă nu există evaluări
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesDe la EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesÎncă nu există evaluări
- A Phase Variable Model of Brushless DC MotorsDocument4 paginiA Phase Variable Model of Brushless DC MotorsenmnabilÎncă nu există evaluări
- Modeling of Line-Starting of Reluctance Synchronous Motors Considering Magnetic Saturation, With Experimental ValidationDocument6 paginiModeling of Line-Starting of Reluctance Synchronous Motors Considering Magnetic Saturation, With Experimental ValidationenmnabilÎncă nu există evaluări
- PMSM Electric VehicleDocument95 paginiPMSM Electric VehicleHuynh Thanh AnhÎncă nu există evaluări
- A Study On The Calculation and Reduction Method of Torque Ripple For PDFDocument1 paginăA Study On The Calculation and Reduction Method of Torque Ripple For PDFenmnabilÎncă nu există evaluări
- [doi 10.1109_ESTS.2009.4906501] Vartanian, Robert; Toliyat, Hamid A. -- [IEEE 2009 IEEE Electric Ship Technologies Symposium (ESTS 2009) - Baltimore, MD, USA (2009.04.20-2009.04.22)] 2009 IEEE Electr.pdfDocument6 pagini[doi 10.1109_ESTS.2009.4906501] Vartanian, Robert; Toliyat, Hamid A. -- [IEEE 2009 IEEE Electric Ship Technologies Symposium (ESTS 2009) - Baltimore, MD, USA (2009.04.20-2009.04.22)] 2009 IEEE Electr.pdfenmnabilÎncă nu există evaluări
- Torque Ripple Reduction in Reluctance Synchronous MachinesDocument5 paginiTorque Ripple Reduction in Reluctance Synchronous MachinesenmnabilÎncă nu există evaluări
- SVPWMDocument24 paginiSVPWMenmnabilÎncă nu există evaluări
- Abstract 3Document1 paginăAbstract 3enmnabilÎncă nu există evaluări
- Dynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelDocument5 paginiDynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelenmnabilÎncă nu există evaluări
- SpaceVector PWM InverterDocument35 paginiSpaceVector PWM Invertersolomong50% (2)
- [doi 10.1109_aupec.2007.4548117] Baktash, Amir; Vahedi, Abolfazl; Masoum, M.A.S. -- [IEEE 2007 Australasian Universities Power Engineering Conference (AUPEC) - Perth, Australia (2007.12.9-2007.12.12)] 2007 A.pdfDocument5 pagini[doi 10.1109_aupec.2007.4548117] Baktash, Amir; Vahedi, Abolfazl; Masoum, M.A.S. -- [IEEE 2007 Australasian Universities Power Engineering Conference (AUPEC) - Perth, Australia (2007.12.9-2007.12.12)] 2007 A.pdfenmnabilÎncă nu există evaluări
- An Improved MPPT .EltamalyDocument7 paginiAn Improved MPPT .EltamalyenmnabilÎncă nu există evaluări
- 05573149Document4 pagini05573149enmnabilÎncă nu există evaluări
- PWM ModullationDocument29 paginiPWM ModullationPola RismaÎncă nu există evaluări
- 4 Direct Torque Control of Induction Motor Using SimulinkDocument6 pagini4 Direct Torque Control of Induction Motor Using Simulinkapi-19508046Încă nu există evaluări
- Windows-1256 FUZZ DTCDocument3 paginiWindows-1256 FUZZ DTCenmnabilÎncă nu există evaluări
- Windows-1256 - PHOTOVOLTAIC PUMPING SYSTEMS PDFDocument24 paginiWindows-1256 - PHOTOVOLTAIC PUMPING SYSTEMS PDFenmnabilÎncă nu există evaluări
- Application of Space Vector Modulation in Direct Torque Control of PMSMDocument4 paginiApplication of Space Vector Modulation in Direct Torque Control of PMSMenmnabilÎncă nu există evaluări
- 27 640Document11 pagini27 640enmnabilÎncă nu există evaluări
- Windows-1256 DTC DTDTC DSCDocument14 paginiWindows-1256 DTC DTDTC DSCenmnabilÎncă nu există evaluări
- 00536389Document4 pagini00536389enmnabilÎncă nu există evaluări
- 2do Congreso Iberoamericano de Estudiantes de IngenierÍaDocument5 pagini2do Congreso Iberoamericano de Estudiantes de IngenierÍaluckyani2005Încă nu există evaluări
- A New Mathematical Model and Control of A Three-Phase Ac-Dc Voltage Source ConverterDocument8 paginiA New Mathematical Model and Control of A Three-Phase Ac-Dc Voltage Source ConverterenmnabilÎncă nu există evaluări
- Application of Space Vector Modulation in Direct Torque Control of PMSMDocument4 paginiApplication of Space Vector Modulation in Direct Torque Control of PMSMenmnabilÎncă nu există evaluări
- Windows-1256 00349655Document8 paginiWindows-1256 00349655enmnabilÎncă nu există evaluări
- 080Document6 pagini080enmnabilÎncă nu există evaluări
- Space Phasor SPMDocument15 paginiSpace Phasor SPMenmnabilÎncă nu există evaluări
- Serial Communication MFM384-C: Operating Instructions Outline Dimensions (In MM) Panel Cutout Dimensions (In MM)Document4 paginiSerial Communication MFM384-C: Operating Instructions Outline Dimensions (In MM) Panel Cutout Dimensions (In MM)Nirmalya PalÎncă nu există evaluări
- KB6206 - Compatible Positive Voltage RegulatorsDocument6 paginiKB6206 - Compatible Positive Voltage RegulatorsLangllyÎncă nu există evaluări
- OSI Op To Electronics CatalogDocument118 paginiOSI Op To Electronics Catalogshantanu142Încă nu există evaluări
- Flame Detector Uv2Document4 paginiFlame Detector Uv2Valentin AgacheÎncă nu există evaluări
- AEE311L Experiment 7 8Document8 paginiAEE311L Experiment 7 8Fe BaltazarÎncă nu există evaluări
- Bio083 Practical 1Document7 paginiBio083 Practical 12023499618Încă nu există evaluări
- NCP1216 DDocument18 paginiNCP1216 DDavid Isaias Jaimes Reyes100% (1)
- Literature ReviewDocument18 paginiLiterature Reviewroyal1979Încă nu există evaluări
- Understanding The Parts-6253Document3 paginiUnderstanding The Parts-6253Kumar S pÎncă nu există evaluări
- Electricity 1 Nov01 4. Nov 02Document6 paginiElectricity 1 Nov01 4. Nov 02Coolman PoonÎncă nu există evaluări
- Lm3446 Corriente Constante para LedsDocument22 paginiLm3446 Corriente Constante para LedsLionel ValaccoÎncă nu există evaluări
- Three-Phase Brushless Motor Pre-Driver For Paper Feed Use: BA6680FS, BD6761FS, BD6762FVDocument25 paginiThree-Phase Brushless Motor Pre-Driver For Paper Feed Use: BA6680FS, BD6761FS, BD6762FVlutfu saribulutÎncă nu există evaluări
- Catalogo de Maquina de Soldar Marca Miller XMT 304 CC CV MA410427ADocument36 paginiCatalogo de Maquina de Soldar Marca Miller XMT 304 CC CV MA410427ALuis Eugenio Hernandez QuijaiteÎncă nu există evaluări
- Datasheet PDFDocument2 paginiDatasheet PDFEka Hikmah PratiwiÎncă nu există evaluări
- Curriculum Vitae Gaurav Sharma: Professional ExperienceDocument2 paginiCurriculum Vitae Gaurav Sharma: Professional Experiencegaurav sharmaÎncă nu există evaluări
- 3RW40566BB44 Datasheet enDocument5 pagini3RW40566BB44 Datasheet enfararÎncă nu există evaluări
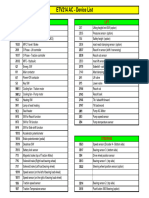
- ETV214 AC - Device List: Traction LiftDocument41 paginiETV214 AC - Device List: Traction LiftKiều Văn TrungÎncă nu există evaluări
- Determination of The Interference and Diffraction of Light (Edited)Document4 paginiDetermination of The Interference and Diffraction of Light (Edited)Marco ConopioÎncă nu există evaluări
- IPC-TM-650 Test Methods Manual: 3000 Lakeside Drive, Suite 309S Bannockburn, IL 60015-1249Document24 paginiIPC-TM-650 Test Methods Manual: 3000 Lakeside Drive, Suite 309S Bannockburn, IL 60015-1249Alberto SaldivarÎncă nu există evaluări
- Pre LABbDocument5 paginiPre LABbRʌʜɘɘɭ AŋsʌʀɩÎncă nu există evaluări
- 20MEP-155 - Workshop Practice Sample Viva Questions With AnswersDocument12 pagini20MEP-155 - Workshop Practice Sample Viva Questions With AnswersVerbala RastogiÎncă nu există evaluări
- SEMINAR ON IgctDocument22 paginiSEMINAR ON Igctapi-19757160Încă nu există evaluări
- CMOS InverterDocument16 paginiCMOS Invertersreekanthreddy peramÎncă nu există evaluări
- Efficiency Optimization of A Standalone Solar Energy System Using Perturb and Observe Based MPPT TechniqueDocument135 paginiEfficiency Optimization of A Standalone Solar Energy System Using Perturb and Observe Based MPPT TechniqueIhechiluru Anyahara100% (1)
- Experiment 3. Single Stage BJT Amplifiers: Names: 1. Buse YILBAŞ - 2376119 2. Elif CABRİ - 2374668 Section: 10Document5 paginiExperiment 3. Single Stage BJT Amplifiers: Names: 1. Buse YILBAŞ - 2376119 2. Elif CABRİ - 2374668 Section: 10Buse YılbaşÎncă nu există evaluări
- LG W1943SSDocument32 paginiLG W1943SSRuben RiveroÎncă nu există evaluări




































































![[doi 10.1109_ESTS.2009.4906501] Vartanian, Robert; Toliyat, Hamid A. -- [IEEE 2009 IEEE Electric Ship Technologies Symposium (ESTS 2009) - Baltimore, MD, USA (2009.04.20-2009.04.22)] 2009 IEEE Electr.pdf](https://imgv2-2-f.scribdassets.com/img/document/242918612/149x198/c330b967b2/1413272390?v=1)




![[doi 10.1109_aupec.2007.4548117] Baktash, Amir; Vahedi, Abolfazl; Masoum, M.A.S. -- [IEEE 2007 Australasian Universities Power Engineering Conference (AUPEC) - Perth, Australia (2007.12.9-2007.12.12)] 2007 A.pdf](https://imgv2-2-f.scribdassets.com/img/document/242918609/149x198/5a80d87f19/1413272389?v=1)