Documente Academic
Documente Profesional
Documente Cultură
Conceptos Basicos 2013 PDF
Încărcat de
Sergio HernandezTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Conceptos Basicos 2013 PDF
Încărcat de
Sergio HernandezDrepturi de autor:
Formate disponibile
Tabla de Cntenido
Rolando Maroo Rodrguez 1
INSTITUTO TECNOLGICO DE VERACRUZ
2013
MECANISMOS
Conceptos bsicos de los
mecanismos
Rolando Maroo Rodrguez
D E P A R T A ME N T O D E ME T A L - ME C N I C A
Tabla de Contenido
Rolando Maroo Rodrguez 3
TABLA DE CONTENIDO
Conceptos Fundamentales ................................................................................................. 5
Definicin de Mquina ................................................................................................... 5
Clasificacin de las mquinas ......................................................................................... 6
Eslabn ........................................................................................................................... 7
Tipos de Movimientos ...................................................................................................... 10
Pares Cinemticos ............................................................................................................ 13
Cadena cinemtica ........................................................................................................... 17
Definicin de Mecanismo ................................................................................................. 18
Representacin cinemtica de mecanismos .................................................................... 19
Clasificacin de los Mecanismos ...................................................................................... 23
Diferencia entre mecanismos y mquina ......................................................................... 23
Movilidad de un Mecanismo ............................................................................................ 24
Ecuacin de Gruebler ....................................................................................................... 25
Paradojas en los mecanismos ........................................................................................... 26
Transmisin del Movimiento ............................................................................................ 27
Mecanismo Articulado de Cuatro Barras ......................................................................... 31
Inversin cinemtica ......................................................................................................... 32
Mecanismos Diversos ....................................................................................................... 32
Mecanismos de retorno rpido .................................................................................... 32
Mecanismos de lnea recta ........................................................................................... 35
Pantgrafo .................................................................................................................... 36
Historia de la Cinemtica .................................................................................................. 36
La Antigudad ............................................................................................................... 36
La Edad Media .............................................................................................................. 39
El Renacimiento ............................................................................................................ 39
En el Siglo XVII .............................................................................................................. 43
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez
En el Siglo XVIII ............................................................................................................. 44
En el Siglo XIX ................................................................................................................ 45
Bibliografa ........................................................................................................................ 49
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 5
CONCEPTOS FUNDAMENTALES
La Cinemtica es la parte de la Mecnica Clsica que estudia las
leyes del movimiento sin considerar las fuerzas o causas necesarias
para producirlo. As que puede decirse que la cinemtica se limita a
estudiar la trayectoria del movimiento como una funcin del
tiempo.
En la cinemtica se utiliza un sistema de coordenadas para describir
las trayectorias y se le llama sistema de referencia. Este concepto es
fundamental. La velocidad es la razn de cambio de la posicin;
mientras que la aceleracin es la razn de cambio de la velocidad.
La velocidad y la aceleracin son las dos principales cantidades que
describen cmo cambia la posicin de una partcula o cuerpo en
funcin del tiempo.
Por su parte la Cintica es aquella parte de la Mecnica que estudia
las fuerzas en los sistemas en movimiento.
DEFI NI CI N DE MQUI NA
Aun cuando prcticamente todas las personas usan cotidianamente
un gran nmero de mquinas, pocos son los que pueden definir con
claridad lo que se puede entender por mquina. Ni siquiera los
especialistas han llegado a una definicin clara y nica de este
concepto, debido, entre otras razones, a su gran complejidad y a los
diferentes enfoques que se le pueden dar a la propia mquina.
El diccionario de la Real Academia Espaola de la Lengua define
mquina como cualquier artificio que sirve para aprovechar, dirigir
o regular la accin de una fuerza. Segn Rouleaux, mquina es
una combinacin de slidos resistentes, dispuestos de manera que
obligan a las fuerzas de la naturaleza a efectuar un trabajo,
producindose ciertos movimientos respuesta en funcin de
movimientos de entrada ejecutados y previstos. Otra definicin
parecida a la de Rouleaux es que mquina es un mecanismo o
conjunto de mecanismos que transmiten fuerza desde una fuente
de energa hasta la resistencia que se debe vencer.
Modernamente la mquina se considera el resultado de un diseo
(de una construccin) en el que intervienen dos grupos de factores:
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 6
unos de naturaleza puramente mecnica (las piezas y los
mecanismos que la constituyen) y otros de naturaleza no mecnica
(esttica, mercados, impacto social, rgimen poltico imperante,
etc.). Ambos conjuntos de factores hacen que las mquinas
modernas adquieran diversas configuraciones y caractersticas
segn el entorno sociopoltico y econmico en el que se disean,
construyen y utilizan.
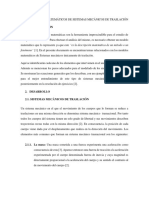
Un ejemplo tpico de mquina es el motor de combustin interna
mostrado en la Figura 1.
FIGURA 1. MOTOR DE COMBUSTIN I NTERNA.
CLASI FI CACI N DE LAS MQUI NAS
Una mquina simple es un mecanismo o conjunto de mecanismos
que que transforman una fuerza aplicada en otra saliente, habiendo
modificado la magnitud de la fuerza, su direccin, su sentido o una
combinacin de ellas.
Las mquinas simples son aquellas que en un solo paso realizan su
tarea y se clasifican como:
Palanca. Es una barra rgida con un punto de apoyo, a la que se
aplica una fuerza y que, girando sobre el punto de apoyo, vence una
resistencia. Se cumple la conservacin de la energa y, por tanto, la
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 7
fuerza aplicada por su espacio recorrido ha de ser igual a la fuerza
de resistencia por su espacio recorrido.
Polea: Una polea simple transforma el sentido de la fuerza;
aplicando una fuerza descendente se consigue una fuerza
ascendente. El valor de la fuerza aplicada y la resultante son iguales,
pero de sentido opuesto.
Cua: Transforma una fuerza vertical en dos horizontales
antagonistas. El ngulo de la cua determina la proporcin entre las
fuerzas aplicada y resultante, de un modo parecido al plano
inclinado.
Plano Inclinado: En un plano inclinado se aplica una fuerza segn el
plano inclinado, para vencer la resistencia vertical del peso del
objeto a levantar. Dada la conservacin de la energa, cuando el
ngulo del plano inclinado es ms pequeo se puede levantar ms
peso con una misma fuerza aplicada pero, a cambio, la distancia a
recorrer ser mayor.
Torno: Se denomina torno a un conjunto de mquinas herramientas
que permiten mecanizar piezas de forma geomtrica de revolucin.
Estas mquinas-herramienta operan haciendo girar la pieza a
mecanizar mientras una o varias herramientas de corte son
empujadas en un movimiento regulado de avance contra la
superficie de la pieza, cortando la viruta de acuerdo con las
condiciones tecnolgicas de mecanizado adecuadas.
Polipasto: La proporcin es distinta a la polea, pero se conserva
igualmente la energa.
Por otro lado, las mquinas compuestas pueden utilizar una
cantidad de pasos que supera ampliamente la deduccin de
cualquier persona y slo aquellos que se dedican a construirla o
estudiarla pueden entender su complejo funcionamiento.
ESLABN
Un eslabn es un cuerpo rgido que tiene dos o ms pares o
elementos de conexin por medio de los cuales se puede conectar
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 8
a otros cuerpos con el fin de transmitir fuerza o movimiento. Los
puntos por donde un eslabn se conecta a otro se llaman nodos.
Por lo general un eslabn es un miembro rgido que tiene en ambos
extremos la posibilidad de conectarse a otros dos eslabones. Sin
embargo, esto se puede extender a tres, cuatro o incluso ms
conexiones, como se muestra en la Figura 2 y no necesariamente
sern piezas rectas, como se observa en la misma figura.
(a) (b) (c)
FIGURA 2. DIFERENTES TIPOS DE ESLABONES.
Incluso pueden tener ms elementos de conexin, como se muestra
en la Figura 3, en donde aparece un motor de combustin en
estrella, que suele utilizarse en los aviones de hlice por el ahorro
de espacio. En este motor la biela maestra se conecta con las otras
cuatro bielas secundarias y al cigeal, as que posee cinco
conexiones.
Biela maestra
Biela secundaria
Pistn
FIGURA 3. MOTOR DE COMBUSTIN EN ESTRELLA.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 9
Existen varios tipos de eslabones que por realizar una funcin
especial reciben un nombre especfico como se muestra a
continuacin.
Eslabn fijo o bastidor. Es aquel que se encuentra unido firmemente
al marco de referencia y por lo tanto no se mueve. Usualmente se le
realza con algn tipo de rayado o sombreado. Se le reconoce
fcilmente ya que es el nico eslabn que muestra explcitamente
slo una junta o unin, como se muestra en la Figura 4.
FIGURA 4. ESLABN FIJO O BASTIDOR.
Manivela. Es un eslabn que puede realizar una rotacin completa
sobre una de sus uniones, no necesariamente respecto al eslabn
fijo. En la Figura 5 la manivela es la salida hacia el eje motriz del
motor.
Manivela
Acoplador
FIGURA 5. ESLABONES MANIVELA Y ACOPLADOR.
Acoplador. Es el eslabn que se conecta en sus extremos con otros
eslabones que presentan movimiento. Normalmente presenta
movimientos de traslacin y rotacin simultneamente, como se
muestra en la Figura 5.
1
2
3
4
1
Eslabn fijo
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 10
Oscilador. Eslabn que presenta un movimiento angular alternativo,
sin llegar a realizar una revolucin completa. El ejemplo ms comn
son las plumillas limpiadoras de un parabrisas de auto.
Corredera. Eslabn que realiza un movimiento alternativo sobre una
gua, la cual puede ser recta o curva. En la Figura 6 se presentan dos
ejemplos de correderas sobre guas rectas y uno sobre guas curvas.
Corredera
Corredera
FIGURA 6. EJEMPLOS DE ESLABONES CORREDERAS.
TIPOS DE MOVIMIENTOS
En el estudio de los mecanismos es necesario definir los distintos
tipos de movimientos producidos por ellos.
Un cuerpo rgido libre de moverse en un marco de referencia
tendr, por lo general, un movimiento complejo, el cual es una
combinacin de rotacin y traslacin. En el espacio tri-dimensional,
puede haber rotacin alrededor de cualquier eje (cualquier eje que
se establezca o alrededor de uno los tres ejes principales) y
simultneamente traslacin, la cual puede resolverse en
componentes sobre los tres ejes. En el plano, o espacio bi-
dimensional, el movimiento complejo se convierte en una
combinacin de rotacin sobre un eje (perpendicular al plano) y
tambin traslacin que se resuelve en componentes a lo largo de los
dos ejes del plano.
Con estas ideas en mente se pueden establecer los siguientes tipos
de movimientos.
Movimiento plano
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 11
Traslacin. Cuando un cuerpo rgido se mueve en tal forma que la
posicin de cada lnea recta del cuerpo es paralela a todas sus otras
posiciones, el cuerpo tiene movimiento de traslacin.
Traslacin rectilnea. La Figura 7 muestra la traslacin
rectilnea, en donde todos los puntos del cuerpo se mueven en
trayectorias de lneas rectas paralelas.
Traslacin
rectilnea
FIGURA 7. TRASLACIN RECTILNEA.
Cuando el cuerpo se mueve hacia atrs y hacia delante en esta
forma, se dice que tiene un movimiento reciprocante, como se
muestra en la Figura 8, en que la corredera 4 tiene un movimiento
reciprocante entre los lmites B y B, estos dos puntos se conocen
como posiciones extremas del mecanismo, ya que la corredera no
puede ir ms all de ellos..
1 1
3
4
B
2
Movimiento
rectilneo
B
m
k
Movimiento
rectilneo
FIGURA 8. EJEMPLOS DE MOVIMIENTO RECTILNEO RECIPROCANTE.
Traslacin curvilnea. Las trayectorias de todos los puntos son
curvas idnticas paralelas a un plano fijo, como se presenta en la
Figura 9.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 12
FIGURA 9. MOVIMIENTO CURVILNEO.
Rotacin. Si cada punto de un cuerpo rgido que tiene movimiento
plano permanece a una distancia constante de un punto fijo
llamado eje que est perpendicular al plano de movimiento, el
cuerpo tiene movimiento de rotacin. Un ejemplo tpico de rotacin
se presenta en los engranes, como en la Figura 10, en donde todos
los puntos de los engranes permanecen siempre a una distancia
constante del centro de cada uno de los engranes.
Ejes de
rotacin
FIGURA 10. MOVIMIENTO ROTATORIO.
Rotacin y traslacin. Muchos cuerpos tienen un movimiento que es
una combinacin de rotacin y traslacin.
Movimiento helicoidal. Cuando un cuerpo rgido se mueve de
manera que cada punto del mismo tiene movimiento de rotacin
alrededor de un eje fijo y al mismo tiempo tiene una traslacin
paralela al eje de rotacin, entonces el cuerpo tiene movimiento
helicoidal. Un ejemplo tpico de este movimiento es el de un
tornillo, como se muestra en la Figura 11.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 13
Tuerca
Traslacin paralela
al eje de rotacin
Rotacin alrededor
de un eje fijo
FIGURA 11. MOVIMIENTO HELICOIDAL.
Movimiento esfrico. Cuando el cuerpo se mueve de manera que
cada punto tiene movimiento alrededor de un punto fijo en tanto
que permanece a una distancia constante del mismo.
Movimiento espacial. El cuerpo tiene movimiento de rotacin
alrededor de tres ejes no paralelos y traslacin en tres direcciones
independientes.
PARES CINEMTICOS
Un par cinemtico es una conexin entre dos o ms eslabones (en
sus nodos), la cual permite algn movimiento relativo entre los
eslabones conectados. Los pares cinemticos tambin se llaman
juntas y se pueden clasificar de varias maneras:
1. Por el tipo de contacto entre los elementos: de punto, de lnea o
de superficie.
2. Por el nmero de grados de libertad permitidos en la junta.
3. Por el tipo de cierre fsico de la junta: cerrada por fuerza o
cerrada por forma.
4. Por el nmero de eslabones unidos.
Por otra parte, el trmino par cinemtico inferior describe a las
juntas en las que la conexin entre los eslabones se realiza por
contacto superficial. Existen seis pares cinemticos inferiores, como
se muestra en la Figura 12.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 14
Par
Cinemtico
nicamente permite
la rotacin del
eslabn.
Slo permite la
traslacin lineal del
eslabn.
Permite la rotacin y
traslacin lineal del
eslabn, pero no son
independientes.
Prismtico
1 GDL
Contiene: P
Revoluta
1 GDL
Contiene: R
Helicoidal
1 GDL
Contiene: RP
Cilndrico
2 GDL
Contiene: RP
Esfrico
3 GDL
Contiene: RRR
Plano
3 GDL
Contiene: RPP
Permite la rotacin y
traslacin lineal del
eslabn, cada
movimiento es
independiente del
otro.
Permite 3 rotaciones
independientes del
eslabn.
Permite 2
traslaciones lineales
y una rotacin del
eslabn. Todos los
movimientos son
independientes.
Caractersticas
Smbolo: R
Smbolo: H
Smbolo: C
Smbolo: S
Smbolo: F
Smbolo: P
FIGURA 12. CLASIFICACIN DE LOS PARES INFERIORES.
En dicha figura se muestran los seis pares cinemticos inferiores
posibles, sus grados de libertad, sus smbolos y una pequea
descripcin de sus movimientos. Los pares de revoluta (R) y los
prismticos (P) son los nicos pares inferiores tiles en un
mecanismo plano. Los pares helicoidal o de tornillo (H), cilndrico
(C), esfrico (S) y par inferior plano (F) son combinaciones de los
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 15
pares de revoluta y/o prismticos y se utilizan en los mecanismos
espaciales o tridimensionales.
El trmino par cinemtico superior se utiliza para designar aquellas
juntas o conexin en donde el contacto se realiza en un punto o
sobre una lnea, como ocurre entre los dientes de dos engranes, en
un rodamiento de bolas y entre una leva y su seguidor, como se
muestra en la Figura 13.
Punto de
contacto
Leva
Seguidor
FIGURA 13. EJEMPLO DE UN PAR SUPERIOR.
Una manera ms til de clasificar los pares cinemticos es por el
nmero de grados de libertad que permiten entre los dos
elementos unidos. Las uniones de pasador (revolutas) permiten un
solo grado de libertad, de rotacin y un par cinemtico prismtico
(como en una corredera), tambin permite un grado de libertad,
pero de traslacin. Estos dos tipos de uniones se conocen como
juntas completas, es decir, una junta completa posee un solo grado
de libertad. En cambio, cualquier otro tipo de unin con ms de un
grado de libertad se conoce como semijunta, como las mostradas
en la Figura 14.
x
q
x
q
FIGURA 14. EJEMPLOS DE UNIONES DE DOS GRADOS DE LIBERTAD.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 16
Observe que un par cinemtico helicoidal no tiene dos grados de
libertad. Ya que el ngulo de la hlice tiene un valor fijo, la posicin
de traslacin se puede determinar en cualquier momento en
trminos de la rotacin y viceversa; as que hay un solo grado de
libertad.
Una junta o par cinemtico con cierre de forma se mantiene unida o
cerrada por su geometra. Un pasador en un orificio o una corredera
en una ranura de dos caras son juntas con cierre de forma. En la se
muestran ejemplos de este tipo.
FIGURA 15. EJEMPLOS DE PARES CON CIERRE DE FORMA.
En contraste, una junta con cierre de fuerza requieren una fuerza
externa para mantenerlas en contacto o cerradas, como puede ser
una corredera sobre una sola superficie o una leva y su seguidor sin
ninguna asistencia.
w
Par cinemtico
superior
Leva
Cierre por fuerza
(resorte)
Seguidor
B
a
n
c
a
d
a
Corredera
FIGURA 16. EJEMPLOS DE PARES CON CIERRE DE FUERZA.
La fuerza para mantener la junta puede ser proporcionada por un
resorte o por la gravedad o por cualquier otro medio externo.
Puede haber deferencias sustanciales en el comportamiento de un
mecanismo debido a la eleccin del cierre de fuerza o de forma,
como se ver particularmente en el caso de las levas.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 17
El orden de un par cinemtico es el nmero de eslabones
conectados menos uno. Se requieren dos eslabones para formar
una junta simple, por lo tanto, la combinacin ms simple de dos
eslabones es una junta de orden uno (2-1) Conforme se van
colocando ms eslabones en la misma junta, el orden de sta se
incrementa de uno en uno. El orden de la junta tiene importancia en
la determinacin apropiada del grado de libertad total del
ensamble. La Figura 17 muestra ejemplos de pares cinemticos de
orden 1 y 2, respectivamente.
2
1
3
2
1
ORDEN =2 ORDEN =1
FIGURA 17. ORDEN DE LOS PARES CI NEMTICOS.
CADENA CINEMTICA
Una cadena cinemtica puede definirse como la agrupacin de
varios pares elementales, de modo que todos los miembros formen
parte, al mismo tiempo, de dos pares simultneamente; en otras
palabras, que todos los pares estn ligados entre s. Sin embargo,
puede haber algn miembro que no est ligado ms que a otro.
Las cadenas cinemticas pueden clasificarse como cadenas
cerradas, cuando todos sus miembros se unen a otros dos, como se
muestra en la Figura 18.
1
2
3
4
1
1
FIGURA 18. EJEMPLOS DE CADENAS CERRADAS.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 18
En cambio, se denominan cadenas abiertas, cuando hay un
miembro no unido a otros dos. La Figura 19 muestra dos ejemplos
de este tipo de cadenas.
2
1
3
FIGURA 19. EJEMPLOS DE CADENAS ABIERTAS.
Una cadena cinemtica puede estar constituida por pares
superiores, inferiores o ambos simultneamente. Al mismo tiempo,
tambin puede contener pares de igual o de diferente grado.
La cadena cinemtica ms sencilla contendr slo dos miembros (un
par), siendo necesariamente abierta. Un ejemplo puede constituirlo
la cadena formada por un tornillo y su tuerca.
Las cadenas cinemticas cerradas ms simples pueden formarse con
slo tres miembros. Sin embargo, no siempre con tres miembros
puede formarse una cadena cinemtica, dependiendo para lograrlo
del tipo del tipo de pares que la formen.
DEFINICIN DE MECANISMO
Un mecanismo es una cadena cinemtica a la que se le ha
inmovilizado uno de sus miembros. A este miembro fijo se le llama
bastidor. Otra definicin es: Un mecanismo es una combinacin de
cuerpos rgidos o no deformables conectados de tal manera que se
mueven uno sobre el otro con un movimiento relativo definido. La
funcin de un mecanismo es producir, transformar o controlar un
movimiento.
En cambio, Mecanismos, como materia de estudio es la parte del
diseo de mquinas que se interesa del diseo cinemtico de los
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 19
mecanismos de eslabones articulados, levas, engranes y trenes de
engranes.
REPRESENTACIN CI NEMTICA DE MECANISMOS
Con el fin de simplificar el estudio de los mecanismos, nunca se
dibujan estos en su totalidad, con la forma y dimensiones de cada
uno de sus miembros y pares, sino que se sustituye el conjunto por
un esquema, formado generalmente por los ejes de los diferentes
miembros o por las lneas de unin de los centros de cada una de
sus articulaciones. Estas articulaciones no se dibujan por regla
general (aunque a veces puedan representarse por pequeos
crculos, rectngulos, etc.). Dicho esquema se conoce con el nombre
de diagrama cinemtico del mecanismo. La Figura 20 muestra la
manera comn de esquematizar los eslabones planos en la
representacin cinemtica de los mecanismos.
Eslabn tipo barra
Eslabn plano general
Eslabn fijo
FIGURA 20. ESQUEMATIZACIN TPICA DE ESLABONES.
Por otra parte, la Figura 21 muestra los pares cinemticos o uniones
ms empleados en la cinemtica de los mecanismos. Los elementos
mostrados en esta figura y la anterior son de gran ayuda a la hora
de presentar los mecanismos.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 20
Par de revolucin o
articulacin
Entre eslabones Con el suelo o marco fijo
Par prismtico o
gua-corredera
Par cilndrico
Par esfrico o rtula
Corredera con
articulacin
Articulacin en
medio de barras
Junta universal
Par helicoidal
Par gua-botn
FIGURA 21. REPRESENTACIN DE PARES CINEMTICOS COMUNES.
En el estudio de mecanismos, por lo general el eslabn fijo o
bastidor se designa como el 1, numerando los eslabones restantes
por orden creciente con nmeros sucesivos 2, 3, etc.
A las articulaciones fijas (unin de un miembro mvil con el
bastidor) se les denomina con la letra O, y el subndice
correspondiente al eslabn mvil, as, por ejemplo la unin del
eslabn 4 con el bastidor se representa con O
4
. Otra nomenclatura
utiliza los subndices de los dos eslabones que se unen, as la misma
unin del eslabn 4 con el bastidor se denota como O
14
. En cambio,
las articulaciones mviles se designan por letras maysculas sin
subndices, esto se muestra en la Figura 22.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 21
1 1
45.0
O
6
O
2
1
2
3
4
5
6
D
B
C
A
FIGURA 22. EJEMPLO DE NOTACIN DE LOS MECANISMOS.
Para realizar la representacin cinemtica de un mecanismo se
puede proceder de la siguiente forma:
1. Sobre el mecanismo real, maqueta, la fotografa o el dibujo de
que se disponga identifique el bastidor o eslabn fijo. El primer
paso para construir un diagrama cinemtico es decidir la pieza
que ser designada como bastidor o bancada. El movimiento de
todos los dems eslabones ser relativo con respecto al
bastidor. En otras palabras, este eslabn es el que se considera
firmemente unido a la tierra o marco de referencia. Si ningn
eslabn est fijo a la tierra, la seleccin del bastidor ser
arbitraria.
2. Identifique los dems eslabones. Cuidadosamente observe el
mecanismo y numere los eslabones restantes.
3. Identifique los pares cinemticos y mrquelos con letras.
(Respete lo que anteriormente se mencion sobre las uniones
fijas). todos los eslabones y pares cinemticos (Recuerde que los
eslabones se numeran y los pares o conexiones se designan con
letras).
4. Identifique algn punto de inters particular.
5. Situar los smbolos de los pares cinemticos en un dibujo, de
manera que su disposicin espacial se aproxime a la real, y unir
mediante segmentos (barras) o superficies poligonales los que
pertenecen a un mismo miembro.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 22
Como ejemplo, considere el mecanismo mostrado en la Figura 23, el
cual corresponde a un tipo de bisagra. Este mecanismo consta de 6
eslabones (incluyendo al fijo) y tambin seis conexiones (rotuladas
de la A a la E y O
2
). Observe en la figura que el eslabn 6 y la
conexin E estn en el mismo lugar.
La Figura 24 muestra la representacin cinemtica del mecanismo
de bisagra. Se est suponiendo que la conexin E es una articulacin
que permite la rotacin del eslabn 5, por eso se utiliza una
corredera con articulacin para representar la conexin E. Tambin
podra suponerse que la conexin E no permite la rotacin del
eslabn 5, en tal caso se debe usar una conexin del tipo gua-botn
y se tendra que eliminar el eslabn 6. Se deja al estudiante que
trate de representar el mecanismo de esta segunda forma.
2
3
4
5
1
6
O
2
B
C
D
A
E
FIGURA 23. BISAGRA.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 23
1
6
E 5
2
C
3
D
O
2
B
4
1
A
FIGURA 24. REPRESENTACIN CINEMTICA DE LA BISAGRA.
CLASIFICACIN DE LOS MECANISMOS
De acuerdo con la movilidad de sus eslabones, los mecanismos
pueden denominarse como desmodrmicos o no desmodrmicos.
El primero corresponde a un mecanismo en el cual, al fijarse la
posicin de cualquiera de los eslabones mviles automticamente
queda definida la posicin de los miembros restantes; este tipo de
mecanismos tambin se llama de movilidad determinada.
DIFERENCIA ENTRE MECANISMOS Y MQUINA
Como se mencion anteriormente, un mecanismo es un dispositivo
que transforma el movimiento en un esquema deseable y que
tpicamente desarrolla fuerzas de muy baja intensidad,
transmitiendo poca potencia. En otras palabras, un mecanismo
permite el movimiento relativo de sus eslabones rgidos. Mientras
que una mquina es un mecanismo diseado para proporcionar
fuerzas significativas y transmitir potencia apreciable. Ejemplo de
estas son: la lavadora, el automvil, un taladro elctrico, etc.
Sin embargo, puede decirse que no hay una divisin bien definida
entre mecanismo y mquina, difieren en grado ms que en clase. Si
las fuerzas y los niveles de energa dentro del dispositivo son de
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 24
importancia, ste se considera una mquina, de lo contrario se
considera un mecanismo.
MOVILIDAD DE UN MECANISMO
La movilidad es un concepto fundamental en el estudio de los
mecanismos. El primer paso en el anlisis o diseo de un
mecanismo es determinar su movilidad. Sin embargo, para
establecer la definicin de movilidad es necesario introducir
primero la definicin de grado de libertad. Existen muchas
definiciones de grado de libertad, a continuacin se da una de las
ms sencillas que existen.
Grado de libertad (GDL). Es el nmero de coordenadas
independientes para definir la posicin de un punto o un cuerpo.
Movilidad de un mecanismo. Es el nmero de grados de libertad
que posee. Otra definicin equivalente de movilidad es: el nmero
mnimo de parmetros independientes requeridos para especificar
la posicin de cada uno de los eslabones de un mecanismo.
Un eslabn simple con movimiento plano, como el mostrado en la
Figura 25 (a) posee 3 grados de libertad .
x
y
(x,y)
q
L
x
y
(x
2
,y
2
)
q
2
L
2
(x
1
,y
1
)
q
1
L
1
(a) (b)
FIGURA 25. GRADOS DE LIBERTAD DE ESLABONES SIMPLES.
Dos eslabones simples no conectados poseen 6 GDL, 3 para cada
uno de ellos, como puede verse en la Figura 25 (b). Si los dos
eslabones se unen mediante una revoluta, este nuevo sistema
tendr 4 GDL
como puede verse en la Figura 26.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 25
x
y
(x,y)
q
1
L
1
q
2
L
2
FIGURA 26. GRADOS DE LIBERTAD PARA DOS ESLABONES UNI DOS.
Existen otras muchas combinaciones de parmetros que podran
emplearse para especificar la posicin de estos eslabones, pero slo
cuatro de ellos pueden ser independientes o 4 son la cantidad
mnima necesaria.
En este ejemplo, la unin de dos eslabones mediante una unin de
giro o revoluta tuvo el efecto de restarle dos grados de libertad al
sistema. En otras palabras, la revoluta permite un solo grado de
libertad entre los eslabones que conecta.
ECUACIN DE GRUEBLER
Es posible desarrollar una ecuacin general que ayude a predecir la
movilidad de cualquier mecanismo con movimiento plano.
Antes de realizar cualquier conexin, un sistema de n eslabones
tiene grados de libertad. Al fijar un eslabn con respecto al piso
hace que el mecanismo pierda 3 GDL. Esto deja al sistema un total
de grados de libertad. Cada unin de un grado
de libertad le quita dos grados de libertad al sistema. De manera
similar, cada unin de dos grados libertad le quita un grado de
libertad al sistema. La movilidad total del sistema est dada por la
ecuacin de Grubler:
En esta ecuacin es el nmero de grados de libertad,
representa el nmero de eslabones, incluyendo el suelo o bastidor,
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 26
es el nmero de uniones de un grado de libertad y
es el
nmero de uniones de dos grados de libertad.
Si el sistema es un mecanismo con M grados de libertad. Si
el sistema es una estructura estticamente determinada. Por
ltimo, si el sistema es una estructura estticamente
indeterminada.
PARADOJ AS EN LOS MECANISMOS
El criterio de Gruebler no presta atencin a la forma y tamaos de
los eslabones y por lo tanto, puede dar resultados errneos en el
caso de configuraciones geomtricas nicas. Por ejemplo, la Figura
27 muestra una estructura ( ) con los eslabones ternarios
(el tringulo y el eslabn fijo) de forma arbitraria. Este arreglo de
eslabones en ocasiones se conoce como quinteto E por su parecido
a la letra mayscula E y al hecho de que tiene cinco eslabones
incluyendo el fijo.
FIGURA 27. ESTRUCTURA CONOCIDA COMO QUINTETO E.
En cambio, la Figura 28 muestra el mismo quinteto E con eslabones
ternarios rectos y paralelos y con nodos equiespaciados. Los tres
eslabones binarios tambin son iguales en longitud. Con esta
peculiar configuracin geomtrica, se puede ver que la estructura se
mover aunque la ecuacin de Gruebler de cero como resultado, es
decir, la ecuacin predice que la estructura no se mover, lo cual
claramente est errado.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 27
FIGURA 28. PARADOJA DEL QUINTETO E.
TRANSMISIN DEL MOVIMIENTO
Existen tres formas de transmitir el movimiento:
Contacto directo, como entre una leva y su seguidor.
Por medio de un eslabn intermedio o biela.
Por un conector flexible, como una banda o cadena
La relacin de velocidades angulares est determinada para el caso
de dos miembros en contacto directo. Considere la leva y seguidor
mostrados en la Figura 29.
FIGURA 29. TRANSMISIN DEL MOVIMIENTO POR CONTACTO DIRECTO.
La leva tiene rotacin en el sentido de las manecillas del reloj y la
velocidad del punto en el cuerpo est representada por el
vector
. La lnea es normal a las dos superficies en el punto
y se conoce como normal comn, lnea de transmisin o lnea de
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 28
accin. La tangente comn a los dos cuerpos y est
representada por la lnea . El vector
puede resolverse en
una componente normal a lo largo de la normal comn y una
componente tangencial
a lo largo de la lnea . Debido al
hecho de que la leva y el seguidor deben permanecer en contacto,
la componente normal de como un punto en el cuerpo debe ser
igual a la componente normal de la velocidad de como un punto
del cuerpo . Tambin se sabe que la velocidad de como un punto
en el cuerpo es perpendicular al radio
y su componente
normal permite encontrar la velocidad
. A partir de este vector
se puede encontrar la velocidad angular del seguidor
utilizando
la relacin :
En los mecanismos de contacto directo, con frecuencia es necesario
determinar la velocidad de deslizamiento. En el mecanismo de la
Figura 29 es la diferencia vectorial entre las componentes
tangenciales de las velocidades en los puntos de contacto. Esta
diferencia est dada por la distancia
, dado que las velocidades
tienen direcciones opuestas. Si
estuvieran del
mismo lado de , entonces la distancia se resta. Si el punto de
contacto est sobre la lnea de centros
, entonces los
vectores
son iguales y estn en la misma direccin.
Tambin deben ser iguales las componentes tangenciales y estar en
la misma direccin, de manera que la velocidad de deslizamiento
sea igual a cero. En ese instante los dos miembros tienen
movimiento de rodamiento puro. En consecuencia, se puede decir
que la condicin para el rodamiento puro es que el punto de
contacto se encuentre en la lnea de centros.
Para el mecanismo de la misma Figura 29, el movimiento entre la
leva y el seguidor es una combinacin de deslizamiento y
rodamiento. El rodamiento puro slo puede existir cuando el punto
de contacto cae sobre la lnea de centros de los cuerpos en
cuestin. Sin embargo, el contacto en este punto puede no ser
posible debido a las proporciones del mecanismo. El deslizamiento
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 29
puro no puede ocurrir entre la leva 2 y el seguidor 3. Para que ello
ocurra, un punto de un eslabn dentro de los lmites de su
recorrido, debe entrar en contacto con todos los puntos sucesivos
en la superficie activa del otro eslabn.
Es posible determinar una relacin de manera que la relacin de
velocidades angulares de dos miembros en contacto directo se
pueda determinar sin pasar por la construccin geomtrica de
antes. Desde
trace perpendiculares a la normal comn
tocndola en y , respectivamente. Se comprueba que las
siguientes relaciones son vlidas:
as que
Del hecho que
son tringulos semejantes, se tiene
Tambin
son tringulos semejantes; en consecuencia
Y por lo tanto,
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 30
Con la normal comn intersecando la lnea de centros en , los
tringulos
tambin son semejantes y en
consecuencia:
En consecuencia, para un par de superficies curvas en contacto
directo, las velocidades angulares son inversamente proporcionales
a los segmentos en que se cortan la lnea de los centros mediante la
normal comn. De esto se deduce que para tener una relacin
constante de velocidades angulares, la normal comn debe
intersecar la lnea de los centros en un punto fijo.
Tambin es posible obtener las relaciones anteriores para la
transmisin del movimiento por medio de un eslabn intermedio o
de una biela (vase la Figura 30), y para la transmisin del
movimiento por medio de un conector flexible.
K
2
3
4
w
2
w
4
O
2
O
4
FIGURA 30. UBICACIN DE K PARA LA TRANSMISIN DE MOVIMIENTO POR BI ELA.
En ambos casos, la relacin de velocidades angulares est dada por:
Para el caso de las poleas, como se muestra en la Figura 31, la
relacin
es independiente de la distancia entre centros
.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 31
O
4 O
2
K
FIGURA 31. UBICACIN DE K PARA LA TRANSMISIN DE MOVIMIENTO POR CONECTOR FLEXIBLE.
MECANISMO ARTICULADO DE CUATRO BARRAS
El mecanismo plano de barras bsico es el llamado cuadriltero
articulado, una de cuyas mltiples formas se representa en la
Figura.
FIGURA 32. MECANISMO DE CUATRO BARRAS.
Este mecanismo est formado por cuatro eslabones (barras), uno de
ellos fijo (bastidor). Los miembros que giran unidos al eslabn fijo se
llaman manivelas o balancines, segn que puedan dar o no una
revolucin completa; estos sern los eslabones 2 y 4 de la Figura 32.
El miembro intermedio, que no tiene eje de rotacin fijo y que sirve
de enlace para los dos anteriores se llama biela; ste es el eslabn 3
de la misma figura.
El mecanismo est formado por cuatro pares de primer grado, de
rotacin, inferiores y de contacto con deslizamiento.
En este mecanismo, si el eslabn 2 al motor de accionamiento ser
el eslabn conductor, el cual arrastra al eslabn conducido 4 por
intermedio de la biela 3.
1
2
3
4
1
Eslabn fijo
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 32
INVERSIN CINEMTICA
Si se permite mover el eslabn que originalmente estaba fijo en un
mecanismo y se fija otro eslabn, se dice que el mecanismo se
invierte. La inversin de un mecanismo no cambia el movimiento
relativo de sus eslabones, aunque s cambia sus movimientos
absolutos. Esta es una definicin muy sencilla, pero ms adelante en
el curso, se volver a estudiar el concepto de inversin cinemtica.
MECANISMOS DIVERSOS
MECANI SMOS DE RETORNO RPI DO
Este tipo de mecanismos se caracterizan por tener una carrera lenta
de avance y una carrera rpida de retroceso o retorno para una
velocidad angular constante de la manivela de entrada. La
aplicacin ms comn de estos mecanismos es en las mquinas
herramientas, como se muestra en la Figura 33.
FIGURA 33. CORTADORA DE METALES.
Los mecanismos de retorno rpido son una combinacin simple de
eslabones como el mecanismo de cuatro barras o el manivela-biela-
corredera.
Existen varios tipos de mecanismos de retorno rpido que se
describen a continuacin:
Mecanismo de eslabn de arrastre. Este mecanismo se
obtiene a partir de un mecanismo de cuatro barras como se
muestra en la Figura 34. Para una velocidad angular
constante del eslabn 2, el 4 gira a velocidad uniforme. El
martinete 6 se mueve con velocidad casi constante en casi
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 33
toda la carrera para dar una carrera ascendente lenta y una
carrera descendente rpida cuando el eslabn motriz 2 gira
en sentido de las manecillas del reloj.
2
1 1
3 4
5
6
1
FIGURA 34. MECANISMOS DE ARRASTRE.
Mecanismo Whitworth. Esta es una variante del mecanismo
manivela-biela-corredera. En este mecanismo, que se
muestra en la Figura 35 tanto el eslabn 2 como el eslabn 4
giran revoluciones completas.
2
1
3
4
6
1
1
FIGURA 35. MECANISMOS DE WHITWORTH.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 34
Mecanismo de cepillo. Este es otra variacin del mecanismo
manivela-biela-corredera, en donde se mantiene fija la biela.
La Figura 36 muestra el mecanismo en la cual el eslabn dos
gira completamente y el 4 oscila.
4
3
5
1
1
1
6
FIGURA 36. MECANISMO DE CEPILLO.
Mecanismo de palanca. Este mecanismo se utiliza en
aquellas aplicaciones en donde hay que vencer una gran
resistencia empleando una pequea fuerza motriz, como lo
es en una prensa, o una quebradora de piedra. Un ejemplo
de este mecanismo se muestra en la Figura 37.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 35
P
F
FIGURA 37. MECANISMO DE PALANCA.
MECANI SMOS DE L NEA RECTA
Este tipo de mecanismos estn diseados de manera que un punto
de los eslabones se mueva en lnea recta. Dependiendo del
mecanismo esta lnea puede ser una recta aproximada o una recta
tericamente correcta. Dos ejemplos de estos mecanismos son el de
Watt (Figura 38) y el de Peaucellier (Figura 39). En el mecanismo de
Watt el punto P genera una lnea recta aproximada. En el
mecanismo de Peaucellier, el punto P genera una lnea recta
exacta.
P
FIGURA 38. MECANISMO DE LNEA RECTA DE WATT.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 36
P
FIGURA 39. MECANISMOS DE LNEA RECTA DE PEAUCELLIER.
PANTGRAFO
Este mecanismo se emplea como dispositivo de copiado. Cuando se
hace que un punto del mecanismo siga determinada trayectoria,
otro punto del mecanismo traza una trayectoria idntica implicada
o reducida. La Figura 40 muestra un dibujo del mismo. Si se requiere
dibujar a una escala reducida, el patrn se sigue con el punto P y se
traza con el punto Q. Si se desea obtener una ampliacin, el patrn
se sigue con el punto Q y se traza con el punto Q.
P
Q
FIGURA 40. MECANISMO PANTGRAFO.
HISTORIA DE LA CINEMTICA
LA ANTI GUDAD
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 37
Ya en el 260 a. de C. parece que exista en China el llamado carro
que mira hacia el sur, como se muestra en Figura 41, un ingenioso
mecanismo montado en un carro que a merced de un tren
epicicloidal de engranes- mantena el brazo de una figura humana
apuntando siempre hacia el Sur, independientemente de en qu
direccin se moviera el carro, y era utilizado como brjula por los
viajeros que atravesaban el desierto de Gobi.
FIGURA 41. CARRO QUE MIRA HACIA EL SUR (MODELO DEL MUSEO SMI THSONIANO).
En poemas de la literatura hind, compuestos hacia el ao 1700 a.
de C., se mencionan carros y ruedas, lo que permite suponer que ya
entonces haba mecanismos suficientemente conocidos.
Homero, cuya existencia se sita hacia el siglo X a. de C., se refiri a
una manivela en la Ilada (XVI, 775) y en la Odisea (XXIV, 39), as
como a un dispositivo para taladrar en la Odisea (IX, 384).
Fueron los sabios griegos quienes se preguntaron por primera vez
por la naturaleza del movimiento. Sus observaciones trascienden
generalmente la contingencia de lo fenomnico para intentar
profundizar en aquello que permanece como substrato de todo
movimiento.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 38
Aristteles (384-322 a. de C.) estableci un co-principio potencial y
pasivo que permanece en todo movimiento y otro co-principio
actual que explica la propia realidad del movimiento (teora
hilemrfica). Sin embargo, a lo largo de sus obras trat aspectos
puramente mecnicos como la composicin geomtrica de fuerzas y
la cada libre de los cuerpos, a la que dio una respuesta errnea:
para idntico volumen, los cuerpos caen ms rpidamente cuanto
ms pesados son; probablemente porque no lleg a captar el
concepto de movimiento en el vaco, ni tuvo la oportunidad de
realizar una rigurosa experimentacin.
Arqumedes (287-212 a. de C.) tiene indudablemente una
trascendencia superior, y en l ven algunos al verdadero iniciador
de la Mecnica como ciencia. Defini el centro de gravedad de un
sistema material, estableci las leyes de la palanca Dadme un
punto de apoyo y mover la Tierra-, enunci el principio que lleva
su nombre en Mecnica de Fluidos y desarroll numerosos ingenios
blicos para la defensa de Siracusa (Sicilia) de donde era originario y
en donde resida.
Ctesebio (285 a. de C.), un genio de la intuicin tcnica, desarroll
numerosos inventos, tales como un fusil de aire comprimido, un
instrumento musical de aire alimentado por un fuelle, una bomba
aspirante-impelente y un dispositivo para regular la posicin de un
espejo de saln.
Unos cien aos ms tarde, la influencia de la cultura helnica
traspasa las fronteras de Grecia y aparece en la ciudad de Alejandra
una floreciente plyade de sabios, que subsiste durante varios
siglos. Hern de Alejandra (siglo I d. de C.) fue el primero que
emple el vapor de agua como generador de potencia y escribi
tres libros en los que describe muchas mquinas, tales como la
prensa de tornillo y un sofisticado odmetro que permita medir
fracciones de milla.
El mundo romano, tan notable en la jurisprudencia y en la milicia,
apenas se manifest en el campo de las matemticas y de las
ciencias de la naturaleza. nicamente cabra citar a escritores
romanos que transmitieron las investigaciones griegas: Vitrubio (85
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 39
a. de C.), arquitecto del emperador Augusto, escribi De
Architectura, resea tecnolgica de la poca; y Boecio (480-525 d.
de C.), recopil en el Quadrivium la herencia cientfica helenstica.
LA EDAD MEDI A
El periodo que abarca el final del imperio romano y toda la Edad
Media, es decir algo ms de diez siglos, es un tiempo de una cierta
decadencia tcnica y cientfico-experimental. Se reprodujeron y
mejoraron ligeramente los ingenios existentes, pero con una casi
total carencia de creatividad mecnica.
EL RENACI MI ENTO
Fue un momento histrico de resurgimiento en todas las reas del
saber humano, caracterizado por la aparicin de grandes genios,
algunos de los cuales centraron su atencin en los problemas
mecnicos. Una de las personalidades ms destacadas fue, sin duda,
Leonardo da Vinci (1452-1519), en cuyos famosos diseos de
mquinas se han inspirado tantos otros autores posteriormente. En
sus apuntes se encuentran diseos de gras (con poleas,
engranajes), ingenios voladores, dispositivos para respirar bajo el
agua, mecanismos de transformacin del movimiento (rotacin en
translacin alternativa), odmetros, etc. La Figura 42 presenta slo
algunos pequeos ejemplos de la creatividad de este genio del
renacimiento.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 40
FIGURA 42. DISEO DE MQUINAS DE LEONARDO DA VINCI .
Gerolamo Cardano (1501-1576) invent la junta de transmisin que
lleva su nombre, como se muestra en la Figura 43 y estudi la
trayectoria de un punto de una circunferencia que rueda por el
interior de otra circunferencia de dimetro doble.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 41
FIGURA 43. JUNTA DE CARDANO O JUNTA UNIVERSAL.
La Esttica, prcticamente olvidada desde Arqumedes,
experiment un notable desarrollo merced a los trabajos de Simon
Stevin (1548-1620), quien public a principios del siglo XVII (1605-
1608) su obra Hypomnemata Mathematica *1+, cuya primera
pgina se muestra en la Figura 44 y en la que trata del equilibrio en
un plano inclinado y de las poleas, empleando con soltura y
seguridad la descomposicin de fuerzas por el mtodo del
paralelogramo.
FIGURA 44. PRIMERA PGINA DE LA HYPOMNEMATA MATHEMATICA DE SIMON STEVIN.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 42
La mxima figura de la poca renacentista fue, sin lugar a dudas, el
italiano Galileo Galilei (1564-1642) filsofo, matemtico y fsico que
ejerci sus tareas docentes en Pisa, Padua y, ms tarde, en
Florencia. Vehemente defensor de la teora heliocntrica, se le
puede considerar como el iniciador de la Dinmica. Estudi la cada
libre de los cuerpos, separando los aspectos cinemtico y dinmico,
y restringiendo su actividad al primero de ellos. No pretendi
explicar el movimiento sino describirlo: Una vez que se conoce con
exactitud cmo caen los cuerpos, entonces se puede probar a
establecer las leyes profundas que los rigen. Oponindose a la
teora aristotlica afirm que los cuerpos caen en el vaco con la
misma velocidad.
Galileo no fue solamente un hbil experimentador, sino que mostr
tambin un agudo ingenio inductivo. Por razonamientos tericos
fue capaz de formular las leyes del movimiento uniformemente
acelerado, y dedujo la trayectoria parablica de un proyectil lanzado
horizontalmente y sometido a la accin de la gravedad. Conoci la
fuerza centrfuga y enunci la ley del sincronismo del pndulo,
estableciendo que el periodo del movimiento era proporcional a la
raz cuadrada de su longitud e independiente de su masa. En sus
trabajos de Esttica, emple la construccin del paralelogramo para
la composicin de fuerzas y defini una nueva magnitud: el
momento de una fuerza.
Los trabajos de Galileo fueron continuados por una plyade de
discpulos, en su mayora italianos, entre quienes merece destacar a
Evangelista Torricelli. En su obra De Motu Gravium Naturaliter
Descendentium et Projectorum abord tambin la cada de los
cuerpos. Fue el primero en afirmar que la Mecnica es una rama de
las Matemticas en la que aparecen unas magnitudes nuevas, tales
como la fuerza, y un concepto tambin nuevo, el movimiento. En su
obra se produjo, de hecho, la emancipacin del movimiento y de las
fuerzas dentro de una Mecnica racional.
En el ao 1561, naci en Londres F. Bacon, creador del empirismo
ingls. De raz plenamente filosfica su obra tiene unas indudables
repercusiones en el desarrollo de las ciencias fsico-naturales.
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 43
EN EL SI GLO XVII
En l la Mecnica alcanza una cierta madurez como ciencia,
logrndose al fin proporcionar una cierta unidad a los
conocimientos desarrollados hasta entonces. Es la poca de los
grandes sabios: Descartes, Pascal y Mariot en Francia, Huygens en
Holanda, Boyle, Hooke y Newton en Inglaterra.
Ren Descartes (1596-1650) formul correctamente la ley de la
inercia, aunque no lleg a captar bien el concepto de aceleracin.
Sus seguidores sostuvieron una controversia con Leibnitz (1646-
1716) acerca de la eficacia del movimiento. Para los cartesianos la
eficacia era proporcional a la velocidad; mientras que para Leibnitz
lo era a su cuadrado. Analizando con detenimiento se observa que
este desacuerdo es tan slo una discrepancia de puntos de vista
sobre un mismo hecho. Para Descartes la eficacia se contaba por el
tiempo, y para Leibnitz por el espacio... y ambos tienen razn. Sin
embargo, esta disputa constituye el primer momento histrico en
que se presentan dos concepciones radicales de la Mecnica: la
Mecnica vectorial y la Mecnica variacional.
Christian Huygens (1629-1695) describi los relojes de pndulo de
su poca e invent el pndulo cicloidal, cuyo periodo es
independiente de la amplitud del movimiento (tautocronismo).
Estableci la reciprocidad entre los centros de suspensin y
oscilacin (teorema de Huygens), y parece que fue tambin
precursor de la ecuacin de Euler-Savary.
Probablemente el cientfico ms importante de la poca fue Isaac
Newton (1642-1727). En l finaliza una poca y con l se inicia otra.
Sistematiz todos los conocimientos inconexos anteriores dndoles
una estructura lgica definitiva. En su obra Principia Mathematica
Philosophiae Naturae estableci las tres leyes fundamentales de la
Dinmica. Matiz de forma definitiva la diferencia entre masa y
peso, y enunci la Ley de la Gravitacin Universal, basndose en la
descripcin que haba hecho Johannes Kepler (1571-1630) del
movimiento planetario.
Philippe de la Hire (1640-1718) present en la Academia de Ciencias
de Pars el trabajo Trait des Roulettes, en el que introdujo los
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 44
conceptos de base y ruleta para el estudio del movimiento plano de
un slido indeformable.
Jean Bernoulli (1661-1748) intervino activamente en el desarrollo
de la Mecnica de Fluidos y reconoci el principio de los trabajos
virtuales como un principio general de la Esttica. Tambin
desarroll el concepto de centro instantneo de rotacin en el
movimiento plano.
EN EL SI GLO XVIII
A lo largo de este siglo se va perfilando la Cinemtica como ciencia,
si bien no se consolidar como tal hasta el siglo siguiente. Jacob
Leupold (1674-1727) escribi la obra Teatrum Machinarium (9
volmenes), una autntica recopilacin de los inventos mecnicos
de siglos precedentes, proporcionando la primera definicin de
mquina: Sistema artificial capaz de producir un movimiento
ventajoso y de mover los cuerpos con ahorro de tiempo y de
fuerza.
Leonhard Euler (1707-1783), discpulo de Jean Bernoulli, estableci
que el movimiento plano de un slido indeformable puede
describirse como la composicin de una traslacin y una rotacin
alrededor de un punto. Este principio, extendido a la velocidad y
aceleracin, constituye el origen del anlisis grfico de
mecanismos. Tambin se le atribuyen las ecuaciones dinmicas del
movimiento de rotacin de un slido en el espacio.
James Watt (1736-1819) dedic un gran esfuerzo a la sntesis de
movimientos, abordando el problema de la trayectoria de un
punto del acoplador del cuadriltero articulado y logrando generar
un movimiento rectilneo aproximado. Estos estudios le permitieron
perfeccionar la mquina de vapor, a la que dot de un mecanismo
capaz de transmitir la fuerza en ambos sentidos.
Gaspard Monge (1746-1818) contribuy a la estructuracin de la
enseanza tcnica superior. Fundador de l'Ecole Polytechnique de
Pars, propuso un curso sobre Elementos de Mquinas, a los que
defini como aquellos medios capaces de modificar la direccin del
movimiento. A su vez, las obras de P. Lanz y A. Betancourt, Essai
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 45
sur la composition des machines (1808) y de J.N. Hachette, Trait
lementaire des machines (1811) contienen la organizacin
propuesta por Monge y L.M.N. Carnot -que la haba ampliado
sustancialmente- en la que clasifican los mecanismos por la tarea
que pueden realizar (por ejemplo, convertir un movimiento circular
continuo en otro rectilneo alternativo).
EN EL SI GLO XIX
Durante este siglo, los conocimientos que constituyen hoy la Teora
de Mquinas se fueron consolidando y madurando. La Geometra y
el Anlisis Matemtico contribuyeron notablemente a este
progreso, motivado por el rpido crecimiento tecnolgico. Los
estudiosos del siglo en esta rea pueden agruparse principalmente
en tres grandes escuelas: la Francesa, la Alemana y la Inglesa.
ESCUELA FRANCESA
Andr Marie Ampre (1775-1836) reconoci la posibilidad de
estudiar el movimiento de los mecanismos con independencia de
las fuerzas que lo producen, y en su obra Essai sur la Philosophie
des Sciences (1834) acu el trmino cinemtica, traduccin del
vocablo griego que significa movimiento. A partir de este momento,
la Cinemtica comenz a ser considerada como ciencia.
Gustave Gaspard de Coriolis (1792-1843), ingeniero de profesin y
director de l'Ecole Polytechnique (Pars), defini la componente de
la aceleracin que lleva su nombre y fue un precursor de la
Mecnica Aplicada moderna.
Michel Chasles (1793-1880) y Louis Poinsot (1777-1859)
generalizaron respectivamente los conceptos de centro
instantneo de rotacin - ya introducido por Jean Bernoulli - y
de eje instantneo de rotacin.
ESCUELA ALEMANA
La Cinemtica moderna comenz con Franz Reuleaux (1829-1905),
profesor de Cinemtica en el Politcnico de Zurich y en Berln, a la
vez que director de la Real Academia de la Industria de Alemania.
Fue el primero en analizar los Mecanismos de modo sistemtico y
profundo, definiendo los conceptos de elemento, para, cadena
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 46
cinemtica e inversin. Clasific los pares en "superiores" (contacto
puntual o a lo largo de la lnea) e "inferiores" y apunt la idea de la
expansin de los pares de revolucin. Redujo toda mquina a una
combinacin de componentes: barras, ruedas, levas, etc. Fue el
creador de la sntesis de tipo (sntesis de Reuleaux), centrada en la
seleccin del mecanismo adecuado para generar un movimiento
preestablecido.
R. Mehmke y Karl Friedrich Mhr (1806-1879) introdujeron en
Alemania los mtodos grficos para el anlisis de mecanismos, tales
como el cinema de velocidades (Mehmke).
Sigfrid Aronhold (1819) enunci, con anticipacin a Kennedy, el
teorema de los tres centros, si bien ambos desarrollaron el
trabajo por separado.
Ludwig Burmester (1840-1927), profesor de Geometra Descriptiva y
Cinemtica en Munich, desarroll mtodos geomtricos para la
sntesis dimensional, y fue el iniciador de lo que ms tarde sera la
Escuela Alemana, que ostent la primaca de la Cinemtica hasta
bien entrado el siglo actual.
Martn Grbler (1851-1935), profesor en las Universidades de
Zurich, Riga, Berln y Dresde, estableci el criterio de movilidad
para mecanismos planos y espaciales que sirvi como punto de
partida para abordar el problema de la sntesis de nmero.
ESCUELA INGLESA
Robert Willis (1800-1875), ingeniero y antroplogo, fue profesor de
la Universidad de Cambridge. En su obra, Principles of
Mechanisms (1841) propuso un criterio de clasificacin de los
mecanismos en base a la relacin de transmisin del movimiento
entre los elementos de entrada y salida.
Esta concepcin del problema supuso una ruptura radical con la
tradicin anterior, representada por Monge, cuyo enfoque era
fundamentalmente descriptivo. Sugiri la posibilidad de una
aproximacin sistemtica a la hora de proyectar mecanismos, lo que
origin extraordinarios avances en el terreno de la Sntesis de
Mecanismos. Su obra ejerci una influencia tal que, en poco tiempo,
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 47
la clasificacin por l propuesta fue adoptada por todos los autores.
Consider que todas las combinaciones simples de mecanismos
pueden agruparse en tres clases.
William John MacQuorn Rankine (1820-1872), profesor de la
Universidad de Glasgow, public la obra A Manual of Machinery
and Millwork (1869 ), en la que dedic cerca de trescientas pginas
a la Cinemtica de las Mquinas, que l llam geometra de las
mquinas. Sigui los criterios de Willis, pero aport el empleo
generalizado de las propiedades del centro instantneo de rotacin
para determinar el campo de velocidades del slido indeformable
en el caso plano.
Samuel Roberts (1827-1893), abogado estudioso de las
matemticas, demostr la existencia de tres tipos diferentes de
cuadrilteros articulados capaces de trazar idnticas curvas de
acoplador.
Alexander Blake William Kennedy (1847-1928), profesor del
University College (Londres), formul el algoritmo grfico para la
determinacin del polo del movimiento relativo entre dos
elementos de un Mecanismo (teorema de los tres centros) y tradujo
al ingls la obra de F. Reuleaux contribuyendo a su difusin.
Robert Henry Smith (1825-1916), profesor de Mecnica
Aplicada,desarroll su actividad docente en Japn. Introdujo el
empleo de mtodos grficos para el anlisis de velocidades en los
mecanismos, tcnica que se generalizara a partir de 1930.
OTRAS ESCUELAS
Giuseppe Antonio Borgnis (1780), profesor de Mecnica en la
Universidad de Pava, sugiri la divisin de los componentes de las
mquinas en seis tipos: receptores, comunicadores, modificadores,
soportes, reguladores y operadores. Esta clasificacin fue
simplificada por De Coriolis que redujo las partes de una mquina a
tres: elementos receptores de la accin externa, elementos
transmisores del movimiento y elementos conducidos.
Pafnutij Chebyshev (1821-1894), profesor de matemticas en la
Universidad de San Petesburgo y creador de la Escuela rusa de
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 48
Cinemtica, se dedic al dimensionamiento del cuadriltero
articulado capaz de generar trayectorias rectas y circulares con
error mnimo, utilizando para ello los polinomios que llevan su
nombre.
EL SI GLOXX
El comienzo del siglo se encuentra dominado por las Escuelas
Alemana y Rusa. La primera - fundada por Burmester - se polariz
hacia los problemas de sntesis dimensional, sobre todo en su
aplicacin a los mecanismos planos. En Rusia, los discpulos de
Chebyshev prosiguieron sus trabajos en las tcnicas de ajustes y
aproximacin de curvas, desarrollando mtodos especiales y nuevas
herramientas matemticas. Entre ellos son particularmente
notables: S. Bloch, que introdujo los nmeros complejos en la
sntesis cinemtica, J.H. Dimentberg, que utiliz los nmeros duales
en el anlisis de mecanismos espaciales, y S.G. Kislitsin, que emple
por primera vez el clculo tensorial.
Hasta la Segunda Guerra Mundial, se puede encontrar un gran
nmero de investigadores, en su mayor parte europeos, que
contribuyeron al desarrollo de la Cinemtica, y con el denominador
comn de que sus mtodos de trabajo se apoyaban fuertemente en
la Geometra. Terminada la guerra, surge con gran mpetu la Escuela
Americana (A. Svoboda, J.A. Hrones y G.L. Nelson) donde pronto se
empez a utilizar profusamente la computadora, promoviendo el
desarrollo de nuevos mtodos algebraicos y numricos, mucho ms
generales que los mtodos grficos previamente utilizados.
Hoy en da, un gran porcentaje de los mtodos en uso estn
orientados a la computadora y la investigacin se dirige, no slo
hacia la mejora de los propios mtodos, sino tambin hacia un
mejor aprovechamiento de las capacidades informticas. Una de las
capacidades ms interesantes es la de resolver problemas de modo
interactivo, lo cual tiene enormes posibilidades tanto en el campo
del diseo como en el de la enseanza.
Limitndose a los tres ltimos decenios, y con la seguridad de omitir
muchos nombres importantes, cabra citar las aportaciones al
mundo de los mecanismos de: Freudenstein, Roth, Sandor, Soni,
Conceptos bsicos de los mecanismos
Rolando Maroo Rodrguez 49
Tesar, Uicker y Chace en Estados Unidos; Bottema y Dijksman, en
Holanda; Crossley y Hunt, en Australia; y muchos otros esparcidos
por toda la geografa mundial.
El desarrollo de las Escuelas Cinemticas mencionadas trajo consigo
un fenmeno marginal enormemente significativo: se constat que
entre el 45% y el 67% de las referencias bibliogrficas citadas en un
artculo escrito en un determinado pas correspondan a trabajos
realizados en ese mismo pas, lo que manifestaba una notable falta
de intercambio de informacin entre las Escuelas. En 1965, se
celebra en Varna (Bulgaria) el Primer Congreso Internacional sobre
Teora de Mquinas y Mecanismos, en el que participaron 120
ingenieros e investigadores de 11 pases. Durante el mismo, la
delegacin blgara propuso la creacin de una Federacin
Internacional para la Teora de Mquinas y Mecanismos. La idea fue
aceptada y, al cabo de 4 aos, la IFToMM (International Federation
for the Theory of Machines and Mechanisms) celebr su Asamblea
Inaugural el 27 de septiembre de 1969 en Zacopane (Polonia). En las
ltimas dcadas, con el nacimiento y consolidacin de la IFToMM,
los estudios de la disciplina de Teora de Mquinas se han hecho
realmente universales. Espaa ingres provisionalmente como
miembro de la IFToMM en 1975, y de forma definitiva en el V
Congreso en Montreal (Canad, 1979).
BIBLIOGRAFA
S-ar putea să vă placă și
- Administración - Ética y Responsabilidad SocialDocument15 paginiAdministración - Ética y Responsabilidad SocialSergio HernandezÎncă nu există evaluări
- Lista de MedicosDocument5 paginiLista de MedicosSergio HernandezÎncă nu există evaluări
- Protocolo de Investigacion Proyecto Brazo Robot 2016 LlenoDocument10 paginiProtocolo de Investigacion Proyecto Brazo Robot 2016 LlenoSergio Hernandez100% (1)
- Calendario 2016-2017 ITV 091216 1Document7 paginiCalendario 2016-2017 ITV 091216 1Sergio HernandezÎncă nu există evaluări
- U2. Analisis de Mecanismos. EjemplosDocument8 paginiU2. Analisis de Mecanismos. EjemplosSergio HernandezÎncă nu există evaluări
- Coordenadas Curvilineas - Huarcaya Meza Nync - Chambi Hidalgo LuisDocument10 paginiCoordenadas Curvilineas - Huarcaya Meza Nync - Chambi Hidalgo LuisMishell Ines Pucuhuayla CollachaguaÎncă nu există evaluări
- 0, MD II. Tema 1. SRNI. 02sep2020Document3 pagini0, MD II. Tema 1. SRNI. 02sep2020Amairany Araujo FuentesÎncă nu există evaluări
- Mapeo Campo EléctricoDocument2 paginiMapeo Campo EléctricoRINKONMETALKK0% (1)
- Trabajo Práctico Unidad I - Gomez DixonDocument8 paginiTrabajo Práctico Unidad I - Gomez DixonDixon GomezÎncă nu există evaluări
- 2018-1 Presentación Algebra LinealDocument12 pagini2018-1 Presentación Algebra Linealdiego camiloÎncă nu există evaluări
- Calculo Vectorial y Ec, ParametricasDocument2 paginiCalculo Vectorial y Ec, ParametricasCheíto FerrerÎncă nu există evaluări
- E22EPB3000004CsNat1FundFICHAS PDFDocument23 paginiE22EPB3000004CsNat1FundFICHAS PDFAlicia CierezkoÎncă nu există evaluări
- Tif CalculoDocument3 paginiTif CalculoLaisha AvendañoÎncă nu există evaluări
- Fund Mat05Document8 paginiFund Mat05Francisco CuevasÎncă nu există evaluări
- Fisica Aplicada PDFDocument3 paginiFisica Aplicada PDFMaximiliano Boschi100% (1)
- Control Cinemática de VelocidadDocument20 paginiControl Cinemática de VelocidadJose Maximo Alvarado OyolaÎncă nu există evaluări
- Clase Fisica 10aDocument25 paginiClase Fisica 10aJorge Mario Gallardo EscobarÎncă nu există evaluări
- Editoriales1 Bach MatematicasDocument140 paginiEditoriales1 Bach MatematicasAna SolaÎncă nu există evaluări
- Espacio Vectorial UnitarioDocument3 paginiEspacio Vectorial UnitarioAriel Alejandro AcostaÎncă nu există evaluări
- Boletín 1 Análisis Vectorial, Magnitudes y UnidadesDocument2 paginiBoletín 1 Análisis Vectorial, Magnitudes y UnidadesCeliaÎncă nu există evaluări
- Problemas MaterialesDocument19 paginiProblemas MaterialesIsaac Guillén Núñez100% (3)
- Dinámica y Cinemática de RotaciónDocument67 paginiDinámica y Cinemática de RotaciónSantiago MatuteÎncă nu există evaluări
- EJERCICIOSNº1Estatica VectoresDocument20 paginiEJERCICIOSNº1Estatica Vectoresjhorshbate100% (1)
- Teoría General de La Conexión AfínDocument35 paginiTeoría General de La Conexión AfínWenceslaoSeguraGonzálezÎncă nu există evaluări
- CalculoIntegralVectorial Actividad 3Document6 paginiCalculoIntegralVectorial Actividad 3Darío Fernando LemaÎncă nu există evaluări
- Fisica TallerDocument15 paginiFisica TallerSaraÎncă nu există evaluări
- Aprender A Programar, Con MATLABDocument134 paginiAprender A Programar, Con MATLABJuventino VegaÎncă nu există evaluări
- Campos Escalares y VectorialesDocument3 paginiCampos Escalares y VectorialesJohana Carolina BetancurÎncă nu există evaluări
- Ecuaciones de Rectas y Planos en Coordenadas CartesianasDocument7 paginiEcuaciones de Rectas y Planos en Coordenadas CartesianasDeener Paredes GarridoÎncă nu există evaluări
- Transformaciones IsometricasDocument9 paginiTransformaciones IsometricasANGE_FERÎncă nu există evaluări
- Modelos Matemáticos para TraslaciónDocument8 paginiModelos Matemáticos para TraslaciónDaniel Andrés Albán RuizÎncă nu există evaluări
- Ejercicios Resueltos de Vectores en El Espacio. Vector Libre. MasMates. Matemáticas de SecundariaDocument1 paginăEjercicios Resueltos de Vectores en El Espacio. Vector Libre. MasMates. Matemáticas de SecundariaSebastian andres Argote gonzaLezÎncă nu există evaluări
- Fisica Universal Sears Zemansky Young FreedmanDocument866 paginiFisica Universal Sears Zemansky Young FreedmanFelipe GarciaÎncă nu există evaluări
- 3-11-2020 Rotacional y Divergencia Campo Vectorial PDFDocument8 pagini3-11-2020 Rotacional y Divergencia Campo Vectorial PDFWilliam SebastianÎncă nu există evaluări
- Instrumentación - Cálculo Vectorial PDFDocument15 paginiInstrumentación - Cálculo Vectorial PDFCs De AnhejÎncă nu există evaluări