Documente Academic
Documente Profesional
Documente Cultură
MMM PDF
Încărcat de
Domenico VerbicaroTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
MMM PDF
Încărcat de
Domenico VerbicaroDrepturi de autor:
Formate disponibile
_
Modelli
Matematici
della
Meccanica
Sergio Benenti
8 maggio 2013
_
`
Calcolo Differenziale
Cinematica del Punto
Cinematica del Corpo Rigido
Meccanica Newtoniana
Meccanica Lagrangiana
Meccanica Hamiltoniana
Meccanica Relativistica
i
_
`
c
1
c
2
c
3
e
1
e
2
e
3
N
...... ..... ... ... .. .. .. .. . .. . .. . . .. . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . .. . . . .. . .. .. . .. .. ... .. .... ..... ................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
. . . . . .
. . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . .. . . . . . . .. . . . .. . . . .. . . .. . . .. . .. . .. . .. . .. .. . .. .. .. .. .. ... .. ... ... .... ...... .......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... ..... ... ... .. .. .. .. . .. . .. . . ..
.
..
.
.
......
.
.
.
.
.
......
..
.
..
.
.
.
.
.
......
...
.
..
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
......
.
..
.
.
.
.
......
..
.
..
.
.
.
.
.
.
.
.
.....
...
..
..
.
.
.
.
.
.
.
.
.
.
.
.
....................................................................................................................................................................................................................................................................................................................
...... . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
.......................... . . . . . . . . . . . . . .. . . . . .
. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . ......................
.....................
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
.
.
.
.
. . . . . . . . . . . . .
.
.
.
.
. . . . . . . . . .
.
. . . . .
.
. . . . . . . . . . . . . . . . . . .
. .
.
. . . . . . . . . . . . . .
. .
.
.
.
. . . . . . . . . . .
.
.
.
. . . . . . . .
.
. . .
Indice
1 Calcolo negli spazi ani 1
1.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Spazi ani euclidei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Richiami sugli spazi vettoriali euclidei . . . . . . . . . . . . . . . . . . . . . 3
1.4 Coordinate curvilinee su di uno spazio ane . . . . . . . . . . . . . . . . . . 4
1.4.1 Coordinate polari del piano . . . . . . . . . . . . . . . . . . . . . . . 7
1.4.2 Coordinate cilindriche . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4.3 Coordinate sferiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5 Campi scalari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.6 Campi vettoriali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.7 Forme dierenziali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.8 Corrispondenza tra campi vettoriali e forme dierenziali . . . . . . . . . . . 14
1.9 Gradiente di un campo scalare . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.10 Curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.11 Superci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.12 Geometrie interna ed esterna di una supercie . . . . . . . . . . . . . . . . . 18
1.13 Sistemi dinamici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.13.1 Curve integrali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.13.2 Funzioni integrali o integrali primi . . . . . . . . . . . . . . . . . . . 25
1.13.3 Flussi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.14 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.15 Stabilit` a di punti critici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2 Cinematica del punto 42
2.1 Cinematica del punto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.2 Rappresentazione in coordinate curvilinee . . . . . . . . . . . . . . . . . . . 46
ii
iii
2.2.1 Calcolo dei simboli di Christoel . . . . . . . . . . . . . . . . . . . . 48
2.2.2 Calcolo diretto delle componenti dellaccelerazione . . . . . . . . . . 49
2.3 Rappresentazione polare di un moto piano . . . . . . . . . . . . . . . . . . . 51
2.4 Rappresentazione intrinseca . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.5 Moti centrali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.6 Dalle leggi di Kepler alla legge di gravitazione universale . . . . . . . . . . . 58
2.7 Moti di un punto su di una supercie . . . . . . . . . . . . . . . . . . . . . . 59
2.8 Moti geodetici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.8.1 Interpretazione variazionale delle geodetiche . . . . . . . . . . . . . . 64
2.8.2 Interpretazione dinamica delle geodetiche . . . . . . . . . . . . . . . 64
2.8.3 Superci sviluppabili . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.8.4 Superci di rotazione . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3 Cinematica del corpo rigido 69
3.1 Rotazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.1.1 Rappresentazione mediante simmetrie . . . . . . . . . . . . . . . . . 71
3.1.2 Rappresentazione esponenziale . . . . . . . . . . . . . . . . . . . . . 72
3.1.3 Rappresentazione di Cayley . . . . . . . . . . . . . . . . . . . . . . . 73
3.1.4 Rappresentazione quaternionale . . . . . . . . . . . . . . . . . . . . . 73
3.1.5 Rappresentazione versore-angolo . . . . . . . . . . . . . . . . . . . . 74
3.1.6 Angoli di Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.2 Moti di un corpo rigido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.3 Formule fondamentali della cinematica del corpo rigido . . . . . . . . . . . . 83
3.4 Cambiamenti di riferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.4.1 Il teorema dei moti relativi . . . . . . . . . . . . . . . . . . . . . . . 87
3.4.2 Il teorema di Coriolis . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.5 Moti rigidi particolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.5.1 Moti traslatori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.5.2 Moti rigidi con punto sso . . . . . . . . . . . . . . . . . . . . . . . . 90
3.5.3 Moti rigidi con asse sso . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.5.4 Moti rigidi piani . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.6 Moti rigidi composti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
3.7 Velocit` a angolare e angoli di Euler . . . . . . . . . . . . . . . . . . . . . . . 96
3.8 Moti di precessione regolare . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
iv
4 Meccanica newtoniana 101
4.1 Dinamica del punto libero . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4.2 Grandezze cinetiche fondamentali . . . . . . . . . . . . . . . . . . . . . . . . 106
4.3 Lo spazio-tempo di Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.4 Lequazione di Weierstrass . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
4.5 Dinamica del punto vincolato . . . . . . . . . . . . . . . . . . . . . . . . . . 122
4.6 Il moto dei gravi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
4.7 Il pendolo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
4.8 Moto di un punto in un campo centrale simmetrico . . . . . . . . . . . . . . 134
4.9 Moto di un punto in un campo newtoniano . . . . . . . . . . . . . . . . . . 137
4.10 Dinamica dei sistemi niti di punti . . . . . . . . . . . . . . . . . . . . . . . 142
4.11 Sistemi di vettori applicati . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
4.12 Baricentro di un sistema di masse . . . . . . . . . . . . . . . . . . . . . . . . 149
4.13 Dinamica del corpo rigido . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
4.14 Corpo rigido con un punto sso . . . . . . . . . . . . . . . . . . . . . . . . . 155
4.15 Moti alla Poinsot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
4.15.1 Moti stazionari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
4.15.2 Moti di precessione regolare . . . . . . . . . . . . . . . . . . . . . . . 159
4.15.3 Equazioni di Lax . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
4.16 Corpo rigido con un asse sso . . . . . . . . . . . . . . . . . . . . . . . . . . 163
4.17 Tensore dinerzia di un sistema di masse . . . . . . . . . . . . . . . . . . . . 165
5 Meccanica lagrangiana 172
5.1 Variet` a dierenziabili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
5.1.1 Sottovariet` a aperte . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
5.1.2 Sottovariet` a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
5.1.3 Applicazioni dierenziabili . . . . . . . . . . . . . . . . . . . . . . . . 177
5.1.4 Variet` a prodotto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
5.1.5 Superci regolari in uno spazio ane . . . . . . . . . . . . . . . . . . 178
5.1.6 Sottovariet` a denite da equazioni . . . . . . . . . . . . . . . . . . . . 179
5.1.7 La circonferenza S
1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
5.1.8 Le sfere S
n
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
5.1.9 I tori T
n
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
5.1.10 Gruppi di matrici, gruppi ortogonali . . . . . . . . . . . . . . . . . . 181
v
5.2 Fibrati tangenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
5.3 Campi vettoriali su variet` a . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
5.4 Forme dierenziali su variet` a . . . . . . . . . . . . . . . . . . . . . . . . . . 189
5.4.1 2-forme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
5.4.2 Prodotto tensoriale e prodotto esterno di 1-forme . . . . . . . . . . . 192
5.4.3 Dierenziale di 1-forme . . . . . . . . . . . . . . . . . . . . . . . . . 192
5.4.4 Prodotto esterno di 1-forme . . . . . . . . . . . . . . . . . . . . . . . 194
5.4.5 Rappresentazione locale delle p-forme . . . . . . . . . . . . . . . . . 194
5.4.6 Dierenziale di una p-forma . . . . . . . . . . . . . . . . . . . . . . . 195
5.4.7 Prodotto tensoriale e prodotto esterno . . . . . . . . . . . . . . . . . 196
5.5 Sistemi olonomi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
5.6 Sistemi olonomi a vincoli dipendenti dal tempo . . . . . . . . . . . . . . . . 203
5.7 Le equazioni di Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
5.8 Meccanica riemanniana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
5.9 Il potenziale e la lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . . 217
5.10 Il caso dello spazio euclideo tridimensionale . . . . . . . . . . . . . . . . . . 222
5.11 Sistemi lagrangiani . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
5.12 Integrali primi dei sistemi lagrangiani . . . . . . . . . . . . . . . . . . . . . 229
5.13 Il principio dellazione stazionaria . . . . . . . . . . . . . . . . . . . . . . . . 233
5.14 Cenni di calcolo delle variazioni . . . . . . . . . . . . . . . . . . . . . . . . . 238
5.15 Equilibrio e stabilit` a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
5.16 Piccole oscillazioni nellintorno di una congurazione di equilibrio stabile . . 244
6 Meccanica hamiltoniana 247
6.1 Fibrati cotangenti e sistemi hamiltoniani . . . . . . . . . . . . . . . . . . . . 248
6.2 La trasformata di Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . 252
6.3 Il metodo di Jacobi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
6.4 Parentesi di Poisson e integrali primi . . . . . . . . . . . . . . . . . . . . . . 262
6.5 Sottovariet` a lagrangiane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
6.6 Variet` a simplettiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
6.7 Sistemi hamiltoniani integrabili . . . . . . . . . . . . . . . . . . . . . . . . . 274
7 Meccanica relativistica 277
7.1 Spazi vettoriali iperbolici . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
7.2 Lo spazio-tempo di Minkowski . . . . . . . . . . . . . . . . . . . . . . . . . 283
vi
7.3 Riferimenti inerziali e tempo relativo . . . . . . . . . . . . . . . . . . . . . . 287
7.4 Decomposizioni relative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
7.5 Le trasformazioni di Lorentz . . . . . . . . . . . . . . . . . . . . . . . . . . . 294
7.6 Dinamica relativistica di una particella materiale . . . . . . . . . . . . . . . 300
7.7 Il campo elettromagnetico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
_
`
I vari modelli della meccanica che andremo ad esaminare formano un edicio co-
stituito da vari ambienti o o spazi, ciascuno caratterizzato da una particolare
geometria. In ognuna di queste geometrie si introducono gure e oggetti con i
quali si costruiscono delle tecniche di calcolo (calcolo vettoriale, calcolo tensoriale,
calcolo dierenziale, calcolo integrale, ecc.)
Ecco lelenco degli spazi su cui fonderemo i nostri modelli:
_
_
Spazi ani euclidei, Cap. 1 :
_
_
Cinematica del punto, Cap. 2.
Cinematica del corpo rigido, Cap. 3.
Meccanica newtoniana, Cap. 4.
Spazi ani pseudo-euclidei : Meccanica relativistica, Cap. 7.
Variet` a dierenziabili :
_
Variet` a riemanniane: Meccanica lagrangiana, Cap. 5.
Variet` a simplettiche: Meccanica hamiltoniana, Cap. 6.
_
`
............................................................................................................................................................................................................................................................................................................................................................................ . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
....................................................................................................................................................................................................................... ...............
.. ... ... .. .. . .. .
................................................ . . . . . . . . . . . . . . . . . . . . .
r
1
r
0
r r
2
(r)
r
0
r
1
r
2
.................... . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . .. . . . . . .. . . . .. . . .. . . .. . . .. . .. . .. . .. . .. . .. .. .. . .. .. .. .. .. .. ... .. .. ... ... ... ... ... .... .... ..... ...... .......... ........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ ........ ...... .... .... .... ... ... ... .. ... .. .. ... .. .. .. .. .. . .. .. .. . .. .. . .. . .. . .. . . .. . . .. . . .. . . . .. . . . . .. . . . . . . .. . . . . . . . . . . . . .
..................................................................................................................................................................................................... .... ... ... .. .. . .. .. . . .. . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . .. . . .. . .. .. .. .. ... ... ...... ... ...............................................................................................................................................................................................................
............................................................................................................................
a
1
................. .............
.... .. .. .. .
. . . . . .. . . . . . . . . . . . ............
...........
.........
...
...
...
...
...
...
...
...
...
...
...
...........
a
2
p
1
. . . . . . . . . . . . . . . . . . ............ ...........
.................... . . . . . . . . . .
. . . .. . .. . ..
. . . . . . . . . . .
a
3
p
2
. . .. . . . . . . . . .. . . . . ............
...........
.................... . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .
a
4
p
3
.................... . . . . . . . . . . . . . . . . . . . .
. . . . .. . . . .. . . .. .. .. ..
.... .... ... .... ..... ....................
....... ..... .... .. ...
...........
a
5
p
4
.................... . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . . . . . . . . . ............ ...........
...........
a
6
p
5
.. . .. . .. . .. . .. . .. . ............
...........
Capitolo 1
Calcolo negli spazi ani
1.1 Introduzione
Definizione 1.1.1 Uno spazio ane `e una terna (A, E, ) dove: A `e un insieme i
cui elementi sono detti punti, E `e uno spazio vettoriale reale di dimensione nita, detto
spazio vettoriale soggiacente allo spazio ane, : A A E `e unapplicazione
che ad ogni coppia ordinata di punti associa un vettore soddisfacente alle due seguenti
condizioni:
(i) per ogni coppia (P, v) A E esiste un unico punto Q A tale che (P, Q) = v;
(ii) per ogni terna di punti (P, Q, R) vale luguaglianza
(1.1) (P, Q) + (Q, R) = (P, R).
La dimensione di uno spazio ane `e per denizione la dimensione dello spazio vettoriale
associato.
Il vettore (P, Q) `e pi` u semplicemente denotato con PQ, o anche con Q P, per cui
luguaglianza (1.1) si scrive
PQ +QR = PR,
o anche
(QP) + (R Q) = R P,
assumendo in questo secondo caso laspetto di unidentit` a algebrica.
Un vettore v E `e anche detto vettore libero. Una coppia (P, v) A E `e detta
vettore applicato. Un vettore applicato (P, v) si identica con la coppia ordinata di
punti (P, Q) dove Q `e tale che PQ = v.
Un sottoinsieme B A `e un sottospazio ane di dimensione m se limmagine di
B B secondo `e un sottospazio di E di dimensione m. In particolare, una retta `e un
sottospazio ane di dimensione 1.
1
2 Capitolo 1. Calcolo negli spazi ani
Se si ssa un punto O A allora lo spazio A si identica con lo spazio vettoriale associato
E. Infatti, in base agli assiomi (i) e (ii) la corrispondenza che ad ogni vettore x E associa
il punto P A tale che x = OP `e biunivoca. Lorigine viene identicata col vettore nullo.
Il calcolo negli spazi ani `e sostanzialmente il calcolo delle funzioni a pi` u variabili reali,
poiche ogni spazio ane `e identicabile con R
n
, una volta assegnato un riferimento:
Definizione 1.1.2 Un riferimento cartesiano o ane di uno spazio ane (A, E, )
di dimensione n `e costituito da un punto O di A, detto origine, e una base (c
1
, . . . , c
n
)
dello spazio vettoriale E.
Una generica base di E sar` a denotata con (c
), intendendo lindice variabile da 1 a n, per
cui un generico riferimento ane sar` a denotato con (O, c
). Ad un riferimento cartesiano
corrisponde un sistema di coordinate cartesiane (x
) = (x
1
, . . . , x
n
). Queste sono le
componenti del generico vettore OP secondo la base (c
):
1
(1.2) OP = x
.
Risulta quindi denita una corrispondenza biunivoca fra lo spazio ane A e lo spazio R
n
.
Attraverso questa identicazione, su di uno spazio ane si possono considerare sistemi
di coordinate curvilinee, che denoteremo con (q
i
) con indice i variabile da 1 a n. Gli
esempi pi` u comuni di coordinate curvilinee, almeno per n = 2 e n = 3, sono illustrati al
1.4. Va sottolineato il fatto che quasi tutto quanto verr` a trattato del calcolo in coordinate
curvilinee negli spazi ani si trasporter` a pari pari al calcolo nelle variet` a dierenziabili.
Quando sar` a necessario specicare la dimensione n di uno spazio ane, lo si denoter` a con
A
n
.
1.2 Spazi ani euclidei
Definizione 1.2.1 Quando lo spazio vettoriale E soggiacente di uno spazio ane `e
dotato di un tensore metrico g, vale a dire di un prodotto scalare, con cui si misura
le lunghezza dei vettori, si dice che lo spazio ane `e euclideo, pi` u precisamente stret-
tamente euclideo se il tensore metrico `e denito positivo. Le coordinate (x
) generate
da un riferimento ane dove la base (c
) `e canonica, si dicono coordinate canoniche
o coordinate ortonormali.
1
Se non viene detto esplicitamente il contrario, per indici ripetuti sottintenderemo la sommatoria estesa a
tutto il loro campo di variabilit`a.
1.3. Richiami sugli spazi vettoriali euclidei 3
_
`
Le entit` a che si introducono negli spazi ani (e le loro propriet` a) si distinguono
in
puramente ani o euclidee,
a seconda che esse prescindano o dipendano dallesistenza di un tensore metrico.
La presenza di un tensore metrico consente di denire operazioni tipiche della
geometria euclidea, quali la misura di distanze, di angoli, di lunghezze di curve,
di aree di superci, di volumi, e cos` via, nonche speciali operazioni su campi
scalari, vettoriali e tensoriali.
Gli spazi ani euclidei di dimensione 3 e 4 forniscono lambiente in cui trattare
la cinematica e la meccanica newtoniana, Capitoli, 2, 3 e 4. Un particolare tipo di
spazio ane pseudo-euclideo di dimensione 4, detto spazio di Minkowski, sta invece
a supporto alla meccanica relativistica, cio`e alla Teoria della Relativit` a Ristretta,
Capitolo 7.
1.3 Richiami sugli spazi vettoriali euclidei
Definizione 1.3.1 Uno spazio vettoriale euclideo `e una coppia (E, g) dove E `e uno
spazio vettoriale (reale, a dimensione nita n) e g `e un tensore metrico su E, cio`e una
forma bilineare g: E E R: (u, v) g(u, v), simmetrica e non degenere; con ci` o
sintende che per g valgono le condizioni
_
_
_
g(u, v) = g(v, v),
g(u, v) = 0, v E = u = 0.
Denotiamo con | | la forma quadratica associata alla forma bilineare g. Poniamo cio`e
|v| = v v, e chiamiamo norma del vettore v questo numero.
2
Il numero reale g(u, v) prende il nome di prodotto scalare dei due vettori u e v e lo si
denota anche con u v. Due vettori si dicono ortogonali se u v = 0. Un vettore u si
dice unitario se u u = 1, isotropo se u u = 0.
Una base (c
) di (E, g) si dice canonica o anche ortonormale se i suoi elementi sono
mutuamente ortogonali,
c
= 0 per ,= ,
e unitari
[c
[ = 1.
Si dimostra che tali basi esistono e che il numero p dei vettori per cui |c
| = +1 (e quindi
il numero qnp di quelli per cui |c
| = 1) `e invariante. La coppia (p, q) prende il nome
di segnatura del tensore metrico.
2
In eetti non si tratta di una norma nel senso dellAnalisi.
4 Capitolo 1. Calcolo negli spazi ani
Uno spazio vettoriale E `e strettamente euclideo se su di esso `e denito un tensore
metrico la cui forma quadratica associata `e denita positiva, la cui segnatura `e quindi
(n, 0). In questo caso ad ogni vettore (non nullo) u corrisponde il numero (positivo)
[u[ =
_
|u| detto modulo di u. Un vettore di modulo unitario `e anche detto versore.
Si dimostra che vale la disuguaglianza (u v)
2
|u| |v| e si denisce quindi langolo
tra due vettori u e v ponendo
cos =
u v
[u[ [v[
.
Assegnata una qualsiasi base (e
i
) di E (i = 1, . . . , n), il tensore metrico si esprime
attraverso la matrice quadrata delle sue componenti denite da
g
ij
= e
i
e
j
,
detta matrice metrica: [g
ij
].
`
E una matrice simmetrica e regolare: g
ij
= g
ji
, det[g
ij
] ,= 0.
In una base canonica la matrice metrica `e diagonale, con sulla diagonale principale p volte
+1 e q volte 1.
Nel caso dello spazio vettoriale (strettamente) euclideo tridimensionale si denisce anche
il prodotto vettoriale di due vettori, che qui denotiamo con u v, ed il prodotto
misto di tre vettori u v w, le cui propriet` a e applicazioni sono argomento dei corsi
di calcolo vettoriale. Ricordiamo soltanto che il prodotto vettoriale e quindi quello misto
presuppongono la scelta di un orientamento dello spazio vettoriale E (di solito quello della
mano destra), e che il prodotto misto u v w fornisce, a meno del segno, il volume
del parallelepipedo individuato dai tre vettori.
1.4 Coordinate curvilinee su di uno spazio ane
Come si vedr` a, il concetto di sistema di coordinate, qui considerato per gli spazi
ani, si estende alle variet` a dierenziabili, di cui anzi costituisce il supporto della
denizione. In quellambito i domini D e D
vanno scelti aperti (nella topologia di
R
n
), mentre negli esempi sopra considerati non lo sono.
Denotiamo con x = (x
1
, x
2
, . . . , x
n
) il vettore posizione in uno spazio ane /
n
, dove le
x
sono coordinate ani di origine O e base (c
). Se x = OP, allora le (x
) si identicano
con le coordinate del generico punto P. Inoltre,
x = x
.
Unequazione vettoriale del tipo
(1.3) x = x(q
i
)
1.4. Coordinate curvilinee su di uno spazio ane 5
dove (q
i
) sono n parametri reali variabili in un dominio D
R
n
, che in componenti `e
equivalente ad un sistema di equazioni
(1.4) x
= x
(q
i
),
stabilisce unapplicazione di D
in un dominio D A
n
. Se questapplicazione `e invertibile
e se le funzioni (1.4) insieme alle inverse sono di classe C
1
almeno allora esse deniscono
un nuovo sistema di coordinate (q
i
) sul dominio D. In queste condizioni la matrice
quadrata [J
i
]
nn
delle derivate parziali
3
(1.5) J
i
=
x
q
i
=
i
x
`e ovunque regolare. Essa prende il nome di matrice jacobiana della trasformazione
di coordinate ((1.4). Ci` o equivale a dire che i vettori
(1.6) e
i
=
i
x
sono linearmente indipendenti in ogni punto del dominio D. Infatti le loro componenti
secondo la base (c
) sono le derivate parziali J
i
:
(1.7) e
i
=
i
x
= J
i
c
e questuguaglianza mostra che i vettori e
i
sono ottenuti dalla base c
mediante una
trasformazione lineare coinvolgente la matrice jacobiana [J
i
]
nn
che `e regolare. Si dice
che i vettori e
i
costituiscono il riferimento associato alle coordinate q
i
: in ogni punto
P D forniscono una base dello spazio vettoriale E soggiacente ad /
n
, base che varia da
punto a punto.
I vettori e
i
sono tangenti alle rispettive curve coordinate. Queste curve sono il luogo
dei punti caratterizzati da valori costanti per tutte le coordinate meno una. Per esempio,
se si ssano i valori delle coordinate (q
2
, . . . , q
n
) si ottiene una curva parametrizzata dalla
coordinata q
1
; il vettore e
1
`e tangente a tutte le curve ottenute in questo modo. Il
riferimento associato a coordinate cartesiane (x
) `e proprio il sistema dei vettori costanti
(c
).
Se lo spazio ane /
n
`e euclideo, cio`e se sullo spazio vettoriale E `e introdotto un tensore
metrico g o, come si usa dire una metrica, allora sul dominio D delle coordinate (q
i
) sono
denite le funzioni
(1.8) g
ij
= g(e
i
, e
j
) = e
i
e
j
3
Qui e nel seguito adottiamo le notazioni abbreviate
i =
q
i
, ij =
q
i
q
j
,
convenendo che gli indici greci , , . . . si riferiscano alle coordinate cartesiane e quelli latini i, j, . . . alle
nuove coordinate.
6 Capitolo 1. Calcolo negli spazi ani
che chiamiamo, in analogia con quanto stabilito per gli spazi vettoriali, componenti del
tensore metrico nelle coordinate (q
i
); esse formano una matrice simmetrica e regolare,
detta matrice metrica . Tuttavia in questo caso queste componenti non sono pi` u delle
costanti ma funzioni delle coordinate (q
i
).
Le coordinate (q
i
) sono dette ortogonali se la corrispondente matrice metrica [g
ij
] `e
ovunque diagonale:
g
ij
= 0, per i ,= j.
Ci` o signica che in ogni punto di D i vettori (e
i
) sono tra loro ortogonali.
Rispetto ad un qualunque sistema di coordinate (cartesiane o curvilinee) una metrica `e
dunque rappresentata dalla matrice [g
ij
], ma pu` o essere rappresentata da una scrittura
del tipo
(1.9) g = g
ij
dq
i
dq
j
che utilizza il prodotto tensoriale di 1-forme 5.4.2 oppure da una scrittura del tipo
(1.10) ds
2
= g
ij
dq
i
dq
j
Questa seconda notazione rende in eetti automatico il calcolo delle componenti della
metrica. Infatti, posto che in coordinate cartesiane ortonormali si ha
(1.11) ds
2
=
3
=1
_
dx
_
2
,
se si calcolano i dierenziali delle equazioni di trasformazione x
= x
(q
i
),
dx
=
x
q
i
dq
i
e si sostituiscono nella sommatoria (1.11), si trova un polinomio di secondo grado omogeneo
nei dierenziali dq
i
, cio`e unespressione del tipo (1.10), i cui coecienti sono prprio
g
ij
=
q
i
x
q
j
=
i
J
j
= e
i
e
j
,
a conferma della (1.8).
Vediamo qui di seguito, nei dettagli, alcuni dei pi` u comunemente usati si stemi di coordi-
nate curvilinee per n = 2 e n = 3. In base a quanto nelle righe precedenti, per calcolare
le componenti del tensore metrico, anzich`e calcolare i vettori e
i
ed eseguirne i prodotti
scalari, partiremo dalla scrittura
(1.12) ds
2
= dx
2
+dy
2
+ dz
2
(ds
2
= dx
2
+ dy
2
nel caso del piano)
e vi sostituiremo le espressioni dei dierenziali delle coordinate cartesiane in funzione delle
coordinate considerate. Inoltre denoteremo semplicemente con (i, j, k) la base canonica a
cui sono associate le coordinate (x, y, z).
1.4. Coordinate curvilinee su di uno spazio ane 7
1.4.1 Coordinate polari del piano
Le coordinate polari del piano (q
1
, q
2
) = (r, ) associate ad un sistema di coordinate
ortonormali (x, y) sono denite dalle equazioni
(1.13)
_
x = r cos ,
y = r sin,
con
D
=
_
r > 0,
0 < 2.
, D = R
2
O.
Lequazione vettoriale (1.3) `e in questo caso
(1.14) x = r (cos i + sin j) = r u,
introdotto il versore radiale
(1.15) u = cos i + sin j,
con (i, j) base relativa alle coordinate (x, y).
I vettori (1.6) sono
(1.16)
_
e
1
= e
r
=
r
x = cos i + sin j = u,
e
2
= e
x = r ( sin i + cos j) = r ,
dove
(1.17) = sin i + cos j
`e il versore trasverso a u nel verso di crescente. I vettori u e sono entrambi unitari
e fra loro ortogonali. I dierenziali delle trasformazioni (1.13) sono
_
dx = dr cos r sin d,
dy = dr sin + r cos d.
Sostituite queste espressioni nella (1.12) troviamo
(1.18) ds
2
= dr
2
+ r
2
d
2
Ordinando le coordinate, ponendo (q
1
, q
2
) = (r, ) troviamo che la matrice metrica `e
(1.19) [g
ij
] =
_
1 0
0 r
2
_
Essendo questa diagonale, si ha la conferma che le coordinate polari sono ortogonali.
8 Capitolo 1. Calcolo negli spazi ani
_
`
.......................................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......................
.....................
..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... ....................
.... ... .. ... . .. .. . .. .
x y
z
r
z
..................................................................... .....................................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..................................................
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...................................
.
.
.
.
.
.
.
. .
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
..
..........................
.
.
.
.
. .
.
.
.
. . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
..................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.................................
..
.
.
.
.
.
.
. .
.
.
.
.
. .
. . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
..........................
.
.
.
.
. .
.
.
.
. . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.................
.
.
.
.
e
r
e
e
z
Figura 1.1: Coordinate cilindriche.
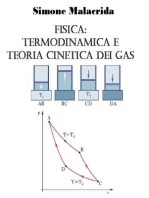
1.4.2 Coordinate cilindriche
Le coordinate cilindriche (q
1
, q
2
, q
3
) = (r, , z) si ottengono riferendo lo spazio ane a
coordinate ani (x, y, z) e considerando sul piano (x, y) le coordinate polari denite dalle
(1.13). Oltre alle (1.16) si ha e
3
= e
z
= k. Pertanto,
(1.20) ds
2
= dr
2
+r
2
d
2
+ dz
2
,
quindi
(1.21) [g
ij
] =
_
_
1 0 0
0 r
2
0
0 0 1
_
_
.
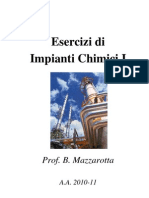
1.4.3 Coordinate sferiche
Le coordinate sferiche
4
(q
1
, q
2
, q
3
) = (r, , ) raggio, longitudine e co-latitudine
sono denite dalle equazioni
(1.22)
_
_
x = r sin cos ,
y = r sin sin,
z = r cos .
con D
=
_
_
r > 0,
0 < < ,
0 < 2,
D = R
3
(asse z).
4
Dette anche coordinate polari sferiche.
1.4. Coordinate curvilinee su di uno spazio ane 9
_
`
............................................................................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......................
.....................
....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... ....................
... ... ... .. .. .. . .. . ..
x
y
r
z
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
........................................
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.............................................................
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.............................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
e
r
e
Figura 1.2: Coordinate sferiche.
La co-latitudine pu` o essere sostituita dalla latitudine , langolo formato da OP e
lequatore, variabile quindi in (/2, /2). Si hanno in questo caso le equazioni
(1.23)
_
_
x = r cos cos ,
y = r cos sin,
z = r sin.
con D
=
_
_
r > 0,
2
< <
2
,
0 < 2,
D = R
3
(asse z).
Nel caso delle (1.22) i vettori del riferimento e
i
sono:
(1.24)
_
_
e
1
= e
r
= sin cos i + sin sinj + cos k = u,
e
2
= e
= r (sin cos j sin sini) ,
e
3
= e
= r (cos cos i + cos sin j sin k) ,
dove u `e il versore radiale, perpendicolare alle sfere coordinate, mentre e
e e
sono
10 Capitolo 1. Calcolo negli spazi ani
tangenti a queste e sono tra loro ortogonali. La matrice metrica `e
(1.25) [g
ij
] =
_
_
1 0 0
0 r
2
sin
2
0
0 0 r
2
_
_
,
e
(1.26) ds
2
= dr
2
+r
2
(d
2
+ sin
2
d
2
).
Nel caso delle (1.23) i vettori e
i
sono
(1.27)
_
_
e
1
= e
r
= cos cos i + cos sinj + sin k = u,
e
2
= e
= r cos (cos j sin i).
e
3
= e
= r sin (cos i + sinj).
La matrice metrica `e
(1.28) [g
ij
] =
_
_
1 0 0
0 r
2
0
0 0 r
2
sin
2
_
e
(1.29) ds
2
= dr
2
+r
2
_
d
2
+ sin
2
d
2
_
.
1.5 Campi scalari
Sono le funzioni reali sopra uno spazio ane. Si rappresentano tramite funzioni f(x)
del vettore posizione x o, equivalentemente, da una funzione f(x
) nelle n coordinate
cartesiane oppure da una funzione f(q
i
) nelle coordinate curvilinee scelte.
5
Ricordiamo
che una tale funzione `e di classe C
k
se ammette derivate parziali continue no allordine
k (k = 0 corrisponde alla continuit` a), di classe C
se ha derivate parziali continue di
qualunque ordine. Se non specicato altrimenti, le funzioni considerate si intenderanno
tacitamente di classe C
. Denotiamo con C
k
(A, R) o semplicemente con F
k
(A) linsieme
dei campi scalari di classe C
k
su A. Per k = usiamo semplicemente la notazione
F(A). Questi insiemi hanno la struttura di anello commutativo e di algebra associativa
e commutativa.
5
A rigore si dovrebbero scegliere simboli diversi per la f, a seconda della scelta delle coordinate. Se la
trattazione non comporta confusioni si usa lo stesso simbolo.
1.6. Campi vettoriali 11
1.6 Campi vettoriali
Definizione 1.6.1 Un campo vettoriale su si uno spazio ane /
n
`e una legge X che
associa ad ogni punto P A
n
un vettore X(P) applicato in P.
Fissato un riferimento cartesiano, un campo vettoriale ammette una rappresentazione del
tipo
(1.30) X = X
,
dove le (X
) sono funzioni reali su A: le componenti cartesiane.
Denotiamo con X
k
(A) linsieme dei campi vettoriali di classe C
k
su A. Per k =
usiamo semplicemente la notazione X(A). Questi insiemi hanno la struttura di modulo
su F
k
(A) e di spazio vettoriale reale a dimensione innita.
Per coordinate (curvilinee) qualsiasi (q
i
) vale una rappresentazione del tipo
(1.31) X = X
i
e
i
,
del tutto simile alla (1.30).
Definizione 1.6.2 La derivata di un campo scalare f rispetto ad un campo
vettoriale X `e il campo scalare Xf denito da
(1.32) Xf = X
f
x
ovvero, in un qualunque sistema di coordinate, da
(1.33) Xf = X
i
f
q
i
Si verica infatti che questa denizione non dipende dal sistema di coordinate scelto.
Lapplicazione X: F(A) F(A) : f Xf cos` denita `e lineare
(1.34) X(af +bg) = aXf + bXg (a, b R),
e soddisfa alla regola di Leibniz:
(1.35) X(fg) = gXf +fXg.
Una siatta applicazione prende il dome di derivazione sulle funzioni.
6
Come sar` a
giusticato nel paragrafo che segue, al posto di Xf useremo anche la notazione
X, df).
6
Si pu`o dimostrare che, viceversa, ogni operatore sulle funzioni soddisfacente a queste due condizioni si
identica con un campo vettoriale.
12 Capitolo 1. Calcolo negli spazi ani
Nota 1.6.1 Se nella denizione (1.33) si pone al posto di f una qualunque delle
coordinate (q
i
), per esempio q
1
, si trova
Xq
k
= X
i
q
k
q
i
.
Ma
q
k
q
i
=
k
i
,
per cui vale la formula
(1.36) X, dq
k
) = X
k
Questa mostra che in un qualunque sistema di coordinate (q
i
) la componente X
k
di un
campo vettoriale X coincide con la derivata della coordinata q
k
rispetto al campo stesso.
7
1.7 Forme dierenziali
Definizione 1.7.1 Una forma lineare o 1-forma sopra uno spazio ane A `e unap-
plicazione lineare : X(A) F(A), che ad ogni campo vettoriale X associa il campo
scalare denotato con
X, ).
In questo caso lineare signica che `e soddisfatta la propriet` a
fX +gY , ) = f X, ) + g Y , )
per ogni scelta delle funzioni f, g F(A) e dei campi vettoriali X, Y X(A).
Linsieme delle 1-forme sopra uno spazio ane A, che denotiamo con
1
(A), `e un modulo
sullanello F(A) e uno spazio vettoriale su R. La somma + di due forme lineari e il
prodotto f di una 1-forma per una funzione sono deniti da:
X, +) = X, ) +X, ), X, f ) = f X, ).
Lapplicazione bilineare
, ) : X(A)
1
(A) F(A) : (X, ) X, )
prende il nome di valutazione (tra una forma lineare e un campo vettoriale).
Un esempio fondamentale di forma lineare:
7
Questa propriet`a sar`a diverse volte applicata nel seguito.
1.7. Forme dierenziali 13
Definizione 1.7.2 Il dierenziale df di un campo scalare f `e la 1-forma denita
dalluguaglianza
(1.37) X, df) = Xf
dove a secondo membro sta la derivata di f rispetto al campo X.
Questa denizione `e corretta perche la linearit` a dellapplicazione df : X(A) F(A) : X
X, df) segue dal fatto che la derivata Xf, tenuto sso il campo scalare f, `e lineare rispetto
al campo vettoriale X.
Dalla regola di Leibniz per la derivata rispetto ad un campo vettoriale segue poi la regola
di Leibniz per il dierenziale:
(1.38) d(fg) = g df +f dg
Scelto un qualunque sistema di coordinate (q
i
), e denotati al solito con e
i
i vettori del
riferimento associato (1.6), ogni 1-forma `e determinata dalle sue componenti denite
da
(1.39)
i
= e
i
, )
Infatti, tenuto conto della (1.36), per ogni campo vettoriale X abbiamo:
X, ) = X
i
e
i
, ) = X
i
e
i
, ) = X
i
i
.
Questo mostra che in componenti la valutazione fra campi vettoriali e 1-forme `e data dalla
formula
(1.40) X, ) = X
i
i
cio`e che la valutazione tra un campo vettoriale ed una forma dierenziale `e la somma dei
prodotti delle componenti corrispondenti (o, come si usa dire, omologhe).
8
A sua volta la (1.40), vista ancora la (1.36), mostra che una forma dierenziale `e sempre
esprimibile come combinazione lineare dei dierenziali delle coordinate, ammette cio`e una
rappresentazione del tipo
(1.41) =
i
dq
i
dove le
i
sono proprio le componenti denite in (1.39).
Inne, particolarizzando la (1.41) al caso di un dierenziale e tenendo conto della (1.37)
si vede che
(1.42) df =
f
q
i
dq
i
Dunque: le componenti del dierenziale di una funzione sono le sue derivate parziali.
8
Ha allora anche senso valutare una 1-forma su di un vettore applicato v: `e il numero v, ) = v
i
i.
14 Capitolo 1. Calcolo negli spazi ani
1.8 Corrispondenza tra campi vettoriali e forme dierenziali
In analogia con quanto accade negli spazi vettoriali euclidei, la presenza del tensore metrico
stabilisce una corrispondenza biunivoca fra campi vettoriali e 1-forme. Ad ogni campo
vettoriale X corrisponde la 1-forma denotata con X
e denita dallequazione
(1.43) Y , X
) = Y X
per ogni campo vettoriale Y . Le componenti X
i
di questa 1-forma, che chiamiamo
componenti covarianti del campo X, sono date da
(1.44) X
i
= g
ij
X
j
.
Si ottengono dunque abbassando gli indici con la matrice metrica. Viceversa, ad una
1-forma =
i
dq
i
corrisponde un campo vettoriale
le cui componenti contravarianti
sono date da
(1.45)
i
= g
ij
j
,
dove [g
ij
] `e la matrice inversa della matrice metrica [g
ij
]. Le g
ij
sono le componenti
contravarianti del tensore metrico.
`
E importante osservare che vale la formula
(1.46) X, dq
k
) = X g
kh
e
h
,
cio`e che il dierenziale dq
k
di una coordinata opera su di un vettore X come il prodotto
scalare per il vettore
(1.47) e
k
= g
kh
e
h
.
1.9 Gradiente di un campo scalare
Quanto stabilito nel paragrafo precedente porta in particolare a denire il gradiente di
un campo scalare V come il campo vettoriale corrispondente al dierenziale dV :
(1.48) grad(V ) = (dV )
.
Il gradiente di V `e anche denotato con V . In componenti:
(1.49) (V )
i
= g
ij
j
V.
Adattando la denizione (1.43) al caso del gradiente possiamo scrivere
(1.50) v, dV ) = v V
per ogni vettore v.
Lutilit` a del gradiente `e messa in evidenza dal teorema del gradiente:
1.10. Curve 15
Teorema 1.9.1 Il gradiente di una funzione V `e ortogonale alle superci di livello (o
equipotenziali) V = costante ed `e orientato nel verso della crescita di V .
9
Dimostrazione. La condizione di tangenza ad una supercie equipotenziale del vettore v
`e v, dV ) = 0, vedi Nota 1.13.7 pi` u avanti. Dalla (1.50) segue allora v V = 0 per ogni v
tangente; questo signica che V `e ortogonale alla supercie. Inoltre, ancora dalla (1.50),
ponendo v = V si trova V, dV ) = (V )
2
> 0.
10
Questo signica che la derivata di V
rispetto al suo gradiente `e positiva. 2
Le condizioni necessarie e sucienti anche un campo vettoriale sia il gradiente di un
potenziale V sono note dallAnalisi (saranno comunque riviste in un contesto pi` u generale
nel Cap. 5).
1.10 Curve
Per curva su di uno spazio ane A intendiamo sempre (salvo avviso contrario) una curva
parametrizzata cio`e unapplicazione : I A da un intervallo reale I R in A. Una
curva ammette una rappresentazione vettoriale
(1.51) x = r(t)
che assegna il vettore posizione OP = x del punto P sulla curva per ogni valore del
parametro t I. Interpretando il parametro t come tempo, una curva pu` o essere
intesa come moto di un punto P(t) nello spazio ane. Chiameremo cammino o orbita
o traiettoria limmagine (I) della curva (si tratta di una curva non parametrizzata).
Rispetto ad un riferimento cartesiano la rappresentazione vettoriale (1.51) si traduce in
un sistema di n equazioni parametriche
(1.52) x
= r
(t).
Una curva `e di classe C
k
se tali sono tutte queste funzioni. Per ogni t I il limite
(1.53) v(t) = lim
h0
1
h
_
r(t + h) r(t)
_
`e un vettore tangente allorbita nel punto r(t). Nellinterpretazione cinematica della curva
`e la velocit` a istantanea.
`
E la derivata della funzione x(t):
11
(1.54) v =
dr
dt
= r.
Le componenti cartesiane di v sono le derivate delle funzioni (1.51):
(1.55) v
=
dr
dt
= r
.
9
Questo enunciato si riferisce a punti non critici di V , in cui cio`e dV ,= 0.
10
Abbiamo escluso i punti in cui dV = 0, cio`e V = 0; di qui la disuguaglianza forte > 0.
11
(Useremo il punto sovrapposto per denotare la derivata rispetto a t.
16 Capitolo 1. Calcolo negli spazi ani
Se la curva si sviluppa sul dominio D di un sistema di coordinate (q
i
) allora essa ammette
equazioni parametriche del tipo
(1.56) q
i
= q
i
(t).
Siccome il vettore r(t) pu` o pensarsi dipendere da t attraverso le coordinate (q
i
), risulta
v =
dr
dt
=
i
r
dq
i
dt
,
dove alle (q
i
) vanno sostituite le equazioni parametriche (1.56). Quindi:
(1.57) v = v
i
e
i
, v
i
=
dq
i
dt
= q
i
.
Questo mostra che le componenti del vettore tangente v secondo il riferimento associato
alle coordinate (q
i
) sono ancora le derivate prime delle equazioni parametriche in quelle
coordinate (come accade per le coordinate cartesiane).
1.11 Superci
Data una funzione F(x) su A, lequazione
(1.58) F(x) = 0
denisce un sottoinsieme Q A, pi` u precisamente una supercie regolare di dimen-
sione n 1 se in ogni punto di Q il dierenziale dF non `e nullo. I punti in cui dF = 0 si
dicono punti singolari di Q. Unequazione del tipo
(1.59) F(x) = c
denisce, al variare del parametro costante c in un opportuno sottoinsieme di R, una
famiglia si sottoinsiemi Q
c
. Due sottoinsiemi corrispondenti a valori distinti della costante
c non si intersecano. Nel caso in cui df ,= 0 su ogni sottoinsieme Q
c
, allora ognuno di questi
`e una supercie regolare. Si dice allora che lequazione (1.59) denisce un fogliettamento
dello spazio ane (eventualmente di un suo aperto).
Se invece si considera un sistema di k n equazioni
(1.60) F
a
(x) = 0 (a = 1, . . . , k)
e se in ogni punto x soddisfacente a queste i k dierenziali df
a
sono linearmente indipen-
denti, allora il sistema denisce una supercie regolare Q di dimensione n k.
Questo accade se e solo se la matrice k n delle derivate parziali F
a
/q
i
ha in ogni punto
di Q rango massimo ( = k):
(1.61) rank
_
F
a
q
i
_
= k
1.11. Superci 17
Pi` u in generale, un sistema di equazioni del tipo
(1.62) F
a
(x) = c
a
(a = 1, . . . , k)
al variare delle costanti c
a
in un opportuno dominio di R
k
denisce un fogliettamento di
codimensione k, sempreche la condizione (1.61) venga soddisfatta su tutto il campo di
denizione delle equazioni.
_
`
.......................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
q
1
......................................................................................................................................................................................................................................................................................................................................................................................................... ....................
.... ... .. ... . .. .. . .. .
q
2
U
....... .......... ...... ..... .... .... ... ... ... .. ... .. .. .. .. .. .. .. .. . .. .. . .. . .. . . .. . .. . . . .. . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . .. . . .. . . .. . .. . .. .. . .. .. .. .. .. .. .. .. .. ... ... .. .... ... .... .... ..... ........ ................................................................................................................................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................................................................
....................................................................................................................................................................................................
....................................................................................................................................................................................................
....................................................................................................................................................................................................
....................................................................................................................................................................................................
....................................................................................................................................................................................................
....................................................................................................................................................................................................
....................................................................................................................................................................................................
....................................................................................................................................................................................................
....................................................................................................................................................................................................
............................................................................................................................................................................................................................................ ....................
. .... ... .. .. .. .. . .. . .
............................................................................................................................................................... . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
............................................................................................................................................................................................................................ . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
x
y
z
e
1
e
2
N
r(q
1
, q
2
)
D
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......................
.....................
curva q
2
var.
..................................................................................................................................................... . . . . . . . . . . . . . . . . . . . .
.. . .. . .. .. ... ... .... .
curva q
1
var.
................................................................................................................................
.......................................................................................................................................................................................................
.............................................................................................................................................................................................................................................
........................................................................................................................................................................................................................................................
.........................................................................................................................................................................................................................................................
.................................................................................................................................................................................................................................
.................................................................................................................................................................................
............................................................................................................................
...................................................................................
........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.................................................................................................................................................................................................................................................................................................................................................................
..........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
..............................................................................................................................................................................................
Figura 1.3: Rappresentazione parametrica di una supecie in R
3
.
Il reticolato U in R
2
(a sinistra) viene trasformato in un reticolato D immerso in
R
3
.
Una supercie Q A
n
di dimensione m < n pu` o anche essere rappresentata, tutta o in
parte, da unequazione vettoriale parametrica
(1.63) x = r(q
i
)
con m parametri (q
i
) = (q
1
, . . . , q
m
) variabili in un dominio U R
m
, equazione che in
coordinate cartesiane si traduce in un sistema di n equazioni parametriche
(1.64) x
= r
(q
i
).
Al variare dei parametri in U si descrive un sottoinsieme D Q. Si richiede che tramite
le (1.63) in ogni punto di D gli m vettori
(1.65) e
i
=
i
r
18 Capitolo 1. Calcolo negli spazi ani
siano indipendenti. Questo equivale alla massimalit` a del rango della matrice m n delle
derivate parziali
i
x
.
(1.66) rank
_
x
q
i
_
= m
Queste formule sono simili a quelle di 1.4. Qui per` o i parametri (q
i
) sono m < n (e
quindi gli indici latini variano da 1 a m). I parametri (q
i
) prendono il nome di coordinate
superciali. Se la condizione dindipendenza dei vettori e
i
`e soddifatta si dice che la (1.63)
rappresenta unimmersione dellinsieme U R
m
nello spazio ane A
n
. In ogni punto
dellinsieme immagine D, sottoinsieme della supercie Q, questi vettori, detti vettori
coordinati, sono tangenti alla supercie e determinano quindi il piano tangente. Pi` u
precisamente essi sono tangenti alle rispettive curve coordinate. Queste curve, tra loro
trasverse, si ottengono facendo variare una coordinata mantenendo costanti le rimanenti.
Sono quindi le immagini secondo limmersione delle rette coordinate del piano R
m
dove
variano le (q
i
).
Esempio 1.11.1 Utilizzando coordinate polari sferiche dello spazio, la sfera S
2
di raggio
R centrata nellorigine pu` o essere descritta da equazioni parametriche del tipo
12
(1.67)
_
_
x = R cos cos ,
y = R cos sin,
z = R sin .
con U =
_
2
< <
2
,
0 < 2,
D = R
3
asse z.
Qui le coordinate superciali sono le coordinate geograche (q
1
, q
2
) = (, ), longitu-
dine e latitudine. I vettori coordinati sono
13
(1.68)
_
e
1
= e
= r cos (cos j sin i).
e
2
= e
= r sin (cos i + sin j).
1.12 Geometrie interna ed esterna di una supercie
Per ogni coppia di vettori (u, v) tangenti alla supercie in un medesimo punto, quindi
tali da essere rappresentati come combinazione lineare dei vettori coordinati, u = u
i
e
i
,
v = v
j
e
j
, il prodotto scalare assume la forma
(1.69) u v = A
ij
u
i
v
j
,
posto
(1.70) A
ij
= e
i
e
j
12
Confrontare con le (1.23).
13
Confrontare con le (1.27).
1.12. Geometrie interna ed esterna di una supercie 19
Si denisce in questo modo una matrice [A
ij
]
22
, funzione delle coordinate superciali,
simmetrica e regolare, detta matrice metrica superciale, quindi una forma bilineare
simmetrica A (ovvero una forma quadratica) sui vettori tangenti a Q in un medesimo
punto detta prima forma fondamentale della supercie. In altri termini, la prima
forma fondamentale `e la restrizione del tensore metrico g in E
3
ai vettori tangenti alla
supercie.
Consideriamo ora le derivate parziali rispetto alle q
i
dei vettori coordinati e
i
. Queste
generano dei campi vettoriali sulla supercie che in genere non sono pi` u tangenti. Intro-
ducendo il versore N ortogonale (normale) alla supercie, vedi Figura 1.3, sussister` a per
queste derivate una rappresentazione del tipo
(1.71)
i
e
j
=
k
ij
e
k
+B
ij
N
Risultano di conseguenza deniti due sistemi di funzioni,
h
ij
e B
ij
, entrambi simmetrici
negli indici in basso,
(1.72)
h
ij
=
h
ji
, B
ij
= B
ji
,
perche
i
e
j
=
i
j
r =
j
i
r =
j
e
i
. Le funzioni
h
ij
prendono il nome di simboli di
Christoel
14
della supercie associati alle coordinate q
i
. Le funzioni B
ij
si interpretano
come componenti di una forma bilineare simmetrica B sui vettori tangenti alla supercie,
detta seconda forma fondamentale. Moltiplicando scalarmente la (1.71) per il versore
normale N si ottiene la denizione esplicita delle B
ij
:
(1.73) B
ij
=
i
e
j
N =
i
N e
j
Dalla seconda di queste espressioni si vede che esse forniscono una misura del variare del
versore normale alla supercie e quindi una misura della curvatura della supercie stessa.
La prima forma fondamentale stabilisce una metrica sulla supercie e quindi una geome-
tria, in genere non euclidea, che chiamiamo geometria interna.
Si pensi ad una supercie (bidimensionale) materializzata in un foglio di carta sottile,
essibile ma inestendibile. Le propriet` a metriche delle gure che possono tracciarsi su
tale foglio, e che prescindono da relazioni con lo spazio ambiente esterno, sono invarianti
rispetto a essioni della supercie, fanno parte della geometria interna. Tali propriet` a
sono tutte determinate dalla prima forma fondamentale A e quindi, qualunque sia il
sistema di coordinate superciali q
i
, dalle sue componenti A
ij
e da tutte le loro derivate
parziali rispetto alle q
i
.
Per geometria esterna intendiamo invece quelle propriet` a della supercie che non sono
invarianti rispetto a essioni e che riguardano il modo con cui essa `e immersa nello spazio
ambiente. Queste propriet` a dipendono dalla seconda forma fondamentale.
14
Pi` u precisamente, Simboli Di C. di seconda specie.
20 Capitolo 1. Calcolo negli spazi ani
C`e per` o una grandezza geometrica dedotta dalla seconda forma fondamentale che dipen-
de dalla sola geometria interna, cio`e dalla prima forma afondamentale. Di questo fatto
sorprendente e paradossale si accorse il Gauss e lo enunci` o come theorema egregium:
Teorema 1.12.1 La curvatura totale di una supercie (bidimensionale) dipende solo
dalla geometria interna, cio`e dalla prima forma fondamentale.
In altri termini, comunque si etta la supercie, supposta inestendibile, la curvatura totale
in ogni punto non cambia.
Si chiamiamo curvature principali di una supercie gli autovalori della seconda forma
fondamentale rispetto alla prima, cio`e le radici
15
1
e
2
dellequazione algebrica
(1.74) det[B
ij
A
ij
] = 0.
Si chiamano poi curvatura media e curvatura totale le grandezze
(1.75) H =
1
2
(
1
+
2
), K =
1
2
,
rispettivamente.
Nota 1.12.1 Una supercie si dice (localmente) sviluppabile se ogni suo punto am-
mette un intorno la cui geometria interna `e quella del piano. Si dimostra che una supercie
`e sviluppabile se e solo se la curvatura totale `e nulla ovunque.
Nota 1.12.2 Nei testi classici le componenti della prima e della seconda forma fonda-
mentale di una supercie bidimensionale sono denotate rispettivamente con (E, F, G) e
(L, M, N); si pone cio`e:
(1.76)
_
E = A
11
, F = A
12
= A
21
, G = A
22
,
L = B
11
, M = B
12
= B
21
, N = B
22
.
Lequazione (1.74) diventa
det
_
L E M F
M F N G
_
= 0,
(E GF
2
)
2
+ (2 M F LGE N) + LN M
2
= 0.
Di qui segue:
(1.77) H =
2 M F LG EN
E GF
2
, K =
LN M
2
E G F
2
.
***
Su questi argomenti si ritorner` a nel capitolo sulla cinematica del punto, 2.7, dove la
nozione di geodetica di una supercie svolger` a un ruolo fondamentale nella costituzione
della geometria interna.
15
Entrambe reali, perche la forma quadratica A `e semi-denita positiva
1.13. Sistemi dinamici 21
1.13 Sistemi dinamici
Un campo vettoriale pu` o essere interpretato come sistema dinamico, vale a dire come
entit` a capace di generare moti.
Lassegnazione di un campo vettoriale X = X
su di una spazio ane A
n
genera due
tipi di equazioni dierenziali che qui scriviamo in forma intrinseca con, a anco, la loro
rappresentazione in un sistema di coordinate generiche (q
i
):
(1.78)
dx
dt
= X(x)
dq
i
dt
= X
i
(q
)
(1.79) X, dF) = 0 X
i
(q
)
F
q
i
= 0
Lequazione (1.78) equivale a un sistema di n equazioni dierenziali ordinarie del primo
ordine (in forma normale e autonome) nelle n funzioni incognite q
i
(t). Le sue soluzioni
sono dette curve integrali di X.
Lequazione (1.79) si traduce in unequazione dierenziale alle derivate parziali del primo
ordine, lineare e omogenea, nella funzione incognita a n variabili F(q
i
). Le sue soluzioni
sono dette funzioni integrali o integrali primi di X.
1.13.1 Curve integrali
Definizione 1.13.1 Una curva integrale di un campo vettoriale X `e una curva x(t)
su A
n
tale che per ogni t I il valore del campo X nel punto x(t) coincide col vettore
velocit` a v(t): X
_
x(t)
_
= v(t).
Si assume che gli intervalli di denizione delle curve integrali siano aperti e contengano lo
zero, detto istante iniziale.
Dunque, essendo x = v, una curva integrale x(t) soddisfa identicamente (cio`e per ogni
t I) lequazione dierenziale (1.78).
Definizione 1.13.2 Una curva integrale si dice basata nel punto P
0
(di vettore x
0
)
se P(0) = P
0
, cio`e se x(0) = x
0
. Si dice anche che P
0
`e il punto base o il punto
iniziale della curva.
Nota 1.13.1 Si consideri uno spazio ane A
n
(si pensi per semplicit` a a caso n = 2, cio`e
al piano ane) invaso da un uido in moto stazionario, cio`e tale che in ogni pressato
punto di A
n
il vettore velocit` a delle particelle del uido che vi transitano `e costante nel
tempo. In queste condizioni i vettori velocit` a nei vari punti d` anno luogo ad un campo
vettoriale X indipendente dal tempo. Viceversa, se si assegna un campo vettoriale X su
A
n
, allora questo pu` o essere interpretato come campo di velocit` a delle particelle di un
22 Capitolo 1. Calcolo negli spazi ani
uido in moto stazionario. In questo caso si pone il problema della determinazione dei
moti delle particelle. Il moto di una particella `e rappresentato da una curva integrale del
campo delle velocit` a.
Per distinguere le varie curve integrali si fa riferimento al punto iniziale. Si pu` o dimostrare
che:
Teorema 1.13.1 Se X `e un campo vettoriale di classe C
k
con k 1 su di un dominio
aperto M A
n
, allora comunque si ssi il punto P
0
M esiste una ed una sola curva
integrale massimale basata in P
0
.
Si dimostra infatti che, subordinatamente a opportune ipotesi di regolarit` a del campo,
tutte le possibili curve integrali basate in P
0
coincidono nelle intersezioni dei loro rispettivi
intervalli di denizione (che contengono tutti lo zero) nel senso che se
1
: I
1
A e
2
: I
2
A sono due curve integrali del campo basate nello stesso punto P
0
, allora le loro
restrizioni allintersezione dei due intervalli di denizione coincidono:
1
[I
1
I
2
=
2
[I
1
I
2
.
La curva integrale massimale basata in P
0
, che denotiamo con
P
0
: I
P
0
M,
`e quella curva integrale tale che
I I
P
0
,
P
0
[I =
per ogni altra curva integrale : I A basata in P
0
. La curva integrale massimale ha
dunque la massima estensione temporale tra tutte le curve integrali basate nello stesso
punto.
Lintervallo I
P
0
di denizione della curva integrale massimale dipende dal punto base P
0
.
Definizione 1.13.3 Se I
P
0
= R per ogni P
0
(tutte le curve integrali massimali sono
denite su tutto lasse reale) si dice che il campo vettoriale `e completo.
Si dimostra che
Teorema 1.13.2 Se il campo X ha supporto compatto allora `e completo.
Il supporto di X `e la chiusura dellinsieme dei punti dove X ,= 0.
Nota 1.13.2 Le immagini delle curve integrali di un campo vettoriale sono dette orbite
o linee di usso. Il loro insieme costituisce il cosiddetto ritratto di fase del campo. Si
noti che unorbita `e limmagine di tutte le curve integrali basate nei suoi punti (Figura
1.4).
Nota 1.13.3 Un punto P `e detto punto critico o singolare di un campo X se
X(P) = 0. In corrispondenza ad un punto critico si annullano i secondi membri del
sistema dierenziale (1.78). Una curva integrale massimale basata in un punto critico `e
costante, assume cio`e sempre il valore P per ogni t R. Un punto critico `e per questo
motivo anche detto punto sso.
1.13. Sistemi dinamici 23
_
`
Figura 1.4: Linee di usso.
Nota 1.13.4 Sistemi non autonomi. Nel caso di un campo vettoriale dipendente
dal tempo X(x, t) il sistema dierenziale del primordine corrispondente `e non autonomo
(la variabile indipendente t compare a secondo membro):
(1.80)
dx
dt
= X(x, t)
Si considera allora nel prodotto cartesiano A
n
R il campo vettoriale, detto estensione
di X, X(x) =
_
X(x, ), 1
_
, posto x = (x, ). Questo campo ha componente X rispetto
al fattore A
n
e componente 1 secondo il fattore R. Il sistema non autonomo (1.80) (di
n equazioni) `e infatti equivalente al sistema dinamico corrispondente a X cioe al sistema
autonomo di n + 1 equazioni
(1.81)
_
_
dx
dt
= X(x, ),
d
dt
= 1,
dove il parametro ausiliario `e equivalente al tempo t: lultima equazione aerma infatti
che = t+costante. Tutte le soluzioni del sistema (1.80) si ottengono dalle curve integrali
del sistema (1.81) dando valore zero a questa costante.
Nota 1.13.5 Equazioni del secondo ordine. Specialmente in meccanica, `e frequente
il caso di sistemi di equazioni dierenziali del secondo ordine del tipo
(1.82)
d
2
x
dt
2
= F
_
x,
dx
dt
_
24 Capitolo 1. Calcolo negli spazi ani
Il secondo membro si pu` o intendere come campo vettoriale dipendente dalla velocit` a
F(x, v), posto v =
dx
dt
. Un tale sistema `e equivalente ad un sistema dinamico sullo spazio
(di dimensione 2n) dei vettori applicati, cio`e delle coppie (x, v), e precisamente al sistema
(1.83)
_
_
dx
dt
= v,
dv
dt
= F(x, v).
Il campo vettoriale X(x, v) corrispondente, sul prodotto cartesiano A
n
E
n
R
n
R
n
, ha
come prima componente la funzione v e come seconda componente la funzione F(x, v).
Se F dipende anche dal tempo t si procede allestensione del campo X nello spazio A
n
E
n
R, introducendo una nuova coordinata e considerando la componente di X rispetto
a questa uguale a 1. Si ottiene in questo modo il sistema dinamico (di dimensione 2n+1)
(1.84)
_
_
dx
dt
= v,
dv
dt
= F(x, v, ),
d
dt
= 1.
Nota 1.13.6 Se la funzione F(x, v) `e pari rispetto alla variabile v, cio`e se F(x, v) =
F(x, v), quindi in particolare se non dipende da v, allora se x(t) `e una soluzione dellequa-
zione (1.82) lo `e anche x(t): ogni moto determinato dalla (1.82) `e ripetibile a ritroso
nel tempo.
1.13. Sistemi dinamici 25
1.13.2 Funzioni integrali o integrali primi
_
`
La determinazione delle curve integrali `e un problema che pu` o presentare notevoli
dicolt` a. Si sono tuttavia sviluppati sia dei metodi qualitativi atti a stabilire il
comportamento delle curve integrali (come la loro stabilit` a, la periodicit` a, ecc.)
sia dei metodi numerici per il loro calcolo approssimato.
Nellambito di questi metodi, notevoli semplicazioni e utili informazioni sul com-
portamento delle curve integrali possono scaturire dalla conoscenza di certe fun-
zioni, dette integrali primi, le quali godono della propriet` a di mantenersi costanti
lungo le curve integrali.
Daltra parte un campo vettoriale d` a origine, come si `e visto, ad unequazione linea-
re alle derivate parziali le cui soluzioni sono dette funzioni integrali. Fatto notevole
`e che queste funzioni coincidono con gli integrali primi. Per la ricerca delle curve
integrali sussite dunque un metodo alternativo a quello dellintegrazione diretta del
sistema dierenziale associato al campo, ma che pu` o a sua volta presentare note-
voli dicolt` a. In certi casi tuttavia la ricerca degli integrali primi ha successo, o
perche si `e in grado di integrare la corrispondente equazione dierenziale, o perche
il campo vettoriale gode di propriet` a di simmetria o di invarianza, tali da produrre,
in base a opportuni teoremi, degli integrali primi (esempi notevoli sono, in Mec-
canica, lintegrale primo dellenergia, l integrale primo della quantit` a di moto,
lintegrale primo delle aree).
Premettiamo alcuni aspetti geometrici fondamentali riguardanti la relazione di tangenza
tra un campo vettoriale ed una supercie.
Definizione 1.13.4 Un campo vettoriale X si dice tangente ad una supercie Q /
n
se ogni sua curva integrale basata in un punto di Q giace tutta su Q.
Teorema 1.13.3 Se una supercie Q `e denita da un sistema di k equazioni
16
(1.85) F
a
(x) = c
a
, a = 1, . . . , k,
allora un campo vettoriale X `e tangente a Q se e solo se per ogni punto di Q si annulla
la derivata delle F
a
rispetto a X, vale a dire se e solo se le k equazioni
(1.86) X, dF
a
) = 0 X
i
F
a
q
i
= 0
sono soddisfatte in ogni punto soddisfacente alle (1.85).
Dimostrazione. La condizione (necessaria e suciente) anche una qualunque curva di
equazione x = r(t) giaccia tutta su Q `e che le equazioni
F
a
(r(t)) = c
a
16
Si richiami quanto visto al 1.11.
26 Capitolo 1. Calcolo negli spazi ani
siano soddisfatte per ogni t appartenente allintervallo di denizione della curva stessa.
Queste equazioni equivalgono a
d
dt
F
a
(r(t)) = 0.
Se in coordinate (q
i
) le equazioni x = r(t) si traducono in equazioni parametriche q
i
= q
i
(t)
allora, sviluppando queste derivate totali si trova
F
a
q
i
dq
i
dt
= 0.
Inne, se la curva `e una curva integral del campo X allora dq
i
/dt = X
i
e le precenti
equazioni risultano equivalenti alle (1.86). 2
Nota 1.13.7 Quanto ora visto per i campi vettoriali vale anche per i singoli vettori: un
vettore v `e tangente ad una supercie di equazioni (1.85) se e solo se
(1.87) v, dF
a
) = 0 v
i
F
a
q
i
= 0
Interpretiamo ora questi risultati in termini di integrali primi:
Definizione 1.13.5 Dicesi integrale primo di un campo vettoriale X su di uno spazio
ane A
n
una funzione F(x) sopra A
n
che si mantiene costante lungo ogni curva integrale
x = r(t) di X, cio`e tale che
(1.88) F
_
r(t
1
)
_
= F
_
r(t
2
)
_
, t
1
, t
2
I.
Secondo questa denizione, per vericare se una funzione `e un integrale primo di un siste-
ma dinamico occorrebbe conoscere le curve integrali, le quali sono di solito incognite, anzi
loggetto da determinarsi proprio tramite la conoscenza di integrali primi.
17
Fortunata-
mente possiamo avvalerci dellequazione caratteristica degli integrali primi (1.89)
che prescinde dalla conoscenza delle curve integrali.
Teorema 1.13.4 Condizione necessaria e suciente anche una funzione F(x) sia
integrale primo di un campo vettoriale X `e che la sua derivata rispetto a X sia nulla:
(1.89) X, dF) = 0 X
i
F
q
i
= 0
Dimostrazione. Si riprende il ragionamento svolto nella dimostrazione del teorema
precedente: la denizione (1.88) equivale a
d
dt
F
_
x(t)
_
= 0, t I
17
Non `e escluso tuttavia che ci si ponga il problema inverso: dalla conoscenza delle curve integrali determinare
tutti i possibili integrali primi. I risultati che seguono, opportunamente reinterpretati, tornano utili anche
in questo caso.
1.13. Sistemi dinamici 27
per ogni curva integrale, condizione che equivale a
dF
dt
= 0.
Svilluppando questa derivata totale si trova
F
q
i
dq
i
dt
= 0.
Ma su di una curva integrale dq
i
/dt = X
i
. Di qui la (1.89). 2
Combinando questo teorema col Teorema 1.13.3, e tenendo conto della condizione di
indipendenza (1.61), si conclude che:
Teorema 1.13.5 Noti k integrali primi indipendenti F
a
del campo X, ogni curva in-
tegrale di X giace su una delle superci di dimensione n k del fogliettamento denito
dalle equazioni F
a
= c
a
.
Nota 1.13.8 Nel caso estremo k = n1 il fogliettamento si riduce ad una congruenza
di curve (non parametrizzate). Queste curve sono allora le orbite delle curve integrali.
Alcune ulteriori osservazioni.
Nota 1.13.9 Si pu` o pi` u in generale intendere come integrale primo una funzione a
valori in uno spazio vettoriale (per esempio lo spazio vettoriale E soggiacente allo spazio
ane) costante lungo le curve integrali. Incontreremo nel seguito degli esempi.
Nota 1.13.10 Dalla Denizione 1.13.5 di integrale primo segue che se (F
1
, F
2
, . . . , F
m
)
sono m integrali primi, allora una qualunque loro composizione f (F
1
, F
2
, . . . , F
m
) tramite
una funzione f : R
m
R `e ancora un integrale primo.
Nota 1.13.11 Tra le soluzioni dellequazione (1.89) vi sono le funzioni costanti. Esse
sono ovviamente prive di interesse (si dicono integrali primi banali). Si tratta quindi
di stabilire se un campo vettoriale X ammette integrali primi non banali. Un campo
vettoriale ammette integrali primi locali, vale a dire deniti nellintorno di punti del
suo dominio di denizione, ma pu` o non ammettere integrali primi globali, cio`e deniti
su tutto il suo dominio di denizione. Integrali primi globali si possono costruire, in linea
di principio, prolungando o giustapponendo integrali primi locali, tenendo presente quanto
detto nella Nota 1.13.10. Tale operazione pu` o tuttavia non dare esito positivo, come `e
mostrato nellEsempio 1.14.1 pi` u avanti.
1.13.3 Flussi
Alla nozione di campo vettoriale come sistema dinamico si aanca la nozione di usso. Qui
di seguito i campi vettoriali e le mappe, o applicazioni, saranno tacitamente considerate
di classe C
.
18
18
Si sa bene che per la validit`a dei teoremi che andiamo ad esaminare basterebbe in eetti molto meno.
28 Capitolo 1. Calcolo negli spazi ani
Definizione 1.13.6 Un usso su di uno spazio ane / `e una mappa
(1.90) : R / /
soddisfacente alle condizioni seguenti:
1. Per ogni ssato t R la mappa
(1.91)
t
: / /: P (t, P)
`e una trasformazione di / (vale a dire unapplicazione invertibile di / in /,
dierenziabile insieme allinversa).
2. Per ogni t, s R vale luguaglianza
(1.92)
t
s
=
t+s
Nota 1.13.12 Dalla (1.92), detta propriet` a di gruppo, seguono le propriet` a
(1.93)
t
s
=
s
t
,
0
= id
M
, (
t
)
1
=
t
Linsieme delle trasformazioni
t
; t R forma dunque un gruppo commutativo, detto
gruppo di trasformazioni ad un parametro.
Sussiste il seguente fondamentale teorema:
19
Teorema 1.13.6 Ogni campo vettoriale completo X su / determina un usso
X
: R
/ / ponendo
(1.94)
X
(t, P) =
P
(t),
dove
P
`e la curva integrale massimale di X basata in P.
Nota 1.13.13 La propriet` a di gruppo (1.92) `e una conseguenza diretta, oltre che del-
lunicit` a della soluzione determinata da un dato iniziale, della seguente notevole propriet` a
del sistema dierenziale (1.78): linsieme delle curve integrali `e invariante rispetto alle
traslazioni temporali.
Vale a dire: se (t) `e una curva integrale denita sullintervallo I, allora per ogni ssato
numero reale s I la curva
s
(t) = (t + s) `e ancora una curva integrale, questa volta
19
Questa `e una delle versioni del cosiddetto teorema di Cauchy sullesistenza e lunicit`a delle soluzioni
di un sistema di equazioni dierenziali ordinarie del primo ordine e in forma normale, che vale pi` u in
generale sulle variet`a dierenziabili. Per una discussione dettagliata si veda p.es. J. Dieudonne,
Elements
danalyse IV, Gauthier-Villars. Per i campi non completi vale un teorema ovviamente pi` u generale, la cui
sola formulazione va oltre gli scopi di queste lezioni. Ci possiamo limitare ad accennare che un campo X
non completo genera dei ussi locali.
1.14. Esempi 29
denita sulintervallo I
s
= I s. Si vede infatti che se x
(t) sono delle funzioni che
risolvono il sistema (1.78) e se a queste funzioni si sostituiscono le funzioni x
s
(t) =
(t + s) il sistema risulta ancora soddisfatto perche, posto u = t + s,
d
s
(t)
dt
=
d
(u)
du
du
dt
=
d
(u)
du
= X
(u)
_
= X
s
(t)
_
.
Segue che, per come `e stato denito il usso, si pu` o aermare da un lato che lapplicazio-
ne t
_
t, (s, P)
_
`e la curva integrale massimale basata in (s, P) e dallaltro, per la
propriet` a di invarianza, che la curva t (t+s, P) `e ancora una curva integrale. Questul-
tima `e basata in (0 +s, P) = (s, P), dunque nello stesso punto della curva precedente.
Per lunicit` a le due curve coincidono: di qui luguaglianza
_
t, (s, P)
_
= (t + s, P).
Nota 1.13.14 Problema: dato un insieme di curve
P
(t) qual`e la condizione necessaria
e suciente anche esse siano le curve integrali di un sistema dinamico X?
Dal teorema e dalla nota precedente segue la risposta: (1) per ogni ssato t lapplicazione
t
: / /: P
P
(t) deve essere invertibile e dierenziabile con linversa e inoltre (2)
deve valere la propriet` a di gruppo (1.92).
1.14 Esempi
Considereremo tre esempi, elementari ma signicativi.
_
`
.................................................................. . . . . . . . . . . .
. . . . . . . . . . . .
.................................................................. ...........
. ... . .. . . . . .
x
y
.................................................................
.................................................................
.................................................................
.................................................................
.................................................................
.................................................................
. . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . ..
. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . ..
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . ..
. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . ..
.................................................................
.................................................................
.................................................................
.................................................................
.................................................................
.................................................................
.................................................................
Figura 1.5: Campo radiale nel piano.
Esempio 1.14.1 Campo radiale. Con questo nome intendiamo quel campo vettoriale
che in ogni punto P dello spazio ane /
n
associa il vettore OP dove O `e un punto
pressato, detto polo del campo.
30 Capitolo 1. Calcolo negli spazi ani
Nel piano (x, y) il campo vettoriale radiale denito da X(x) = x = x i +y j corrisponde
il sistema di equazioni
_
x = x,
y = y.
Si tratta di equazioni dierenziali separate cio`e coinvolgenti ciascuna una singola coordi-
nata. La curva integrale basata in P
0
= (x
0
, y
0
) ha equazioni
x = x
0
e
t
, y = y
0
e
t
,
ed `e denita su tutto lasse reale. Il campo `e pertanto completo. Il usso `e dato da
(t; x
0
) = e
t
x
0
,
posto x
0
= x
0
i + y
0
j. La propriet` a di gruppo `e soddisfatta grazie alla propriet` a carat-
teristica dellesponenziale. Le orbite delle curve integrali non basate nellorigine sono le
semirette aperte uscenti dallorigine, che `e punto critico. Per t le curve integrali
tendono allorigine. La trasformazione
t
`e lomotetia di centro lorigine e coeciente e
t
.
Il campo `e invariante rispetto a rotazioni intorno allorigine.
Se escludiamo lorigine e consideriamo per esempio la circonferenza S
1
di raggio unitario
e centro lorigine, una qualunque funzione H: S
1
R sopra di questa si pu` o estendere
al piano R
2
, esclusa lorigine, per valori costanti lungo le semirette uscenti dallorigine.
Siccome le orbite del campo sono tutte queste semirette (aperte) pi` u lorigine (punto sin-
golare) le funzioni cos` costruite, a partire da funzioni H di classe C
, sono gli integrali
primi di X. Si vede chiaramente che questi integrali primi non sono estendibili per con-
tinuit` a allorigine se non nel caso in cui la funzione H sulla circonferenza `e costante: ma
in questo caso lintegrale primo `e anchesso una funzione costante, quindi banale. Conclu-
diamo allora che il campo X su R
2
non ammette integrali primi globali non banali, pur
ammettendo nellintorno di ogni punto diverso dallorigine inniti integrali primi.
Esempio 1.14.2 Campo radiale unitario: in uno spazio ane euclideo /
n
`e il campo
che ad ogni punto P associa il versore di OP dove O `e un punto pressato, detto polo del
campo. Per esmpio, nel piano euclideo (x, y) di origine O `e denito da
X(x) =
x
[x[
=
x i + y j
_
x
2
+y
2
.
Esempio 1.14.3 Caduta dei gravi. Su R
2
si consideri linsieme di curve di equazioni
parametriche
(1.95)
_
x = x
0
+ y
0
t +
1
2
g t
2
,
y = y
0
+ g t.
Queste curve rappresentano tutti i possibili moti di caduta di un grave lungo una retta
verticale (lasse x orientato verso il basso) essendo y la velocit` a e g laccelerazione (costan-
te). Vediamo se questo `e linsieme delle curve integrali di un campo vettoriale X su R
2
.
1.14. Esempi 31
Posta la (1.95) nella forma
_
x
y
_
=
t
_
x
0
y
0
_
verichiamo che le applicazioni
t
: R
2
R
2
soddisfano alle propriet` a di gruppo (1.92):
s
_
t
_
x
0
y
0
__
=
s
_
x
0
+y
0
t +
1
2
g t
2
y
0
+ gt
_
=
_
x
0
+y
0
t +
1
2
g t
2
+ (y
0
+gt) s +
1
2
g s
2
y
0
+ g t + g s
_
=
_
x
0
+y
0
(t +s) +
1
2
g (t + s)
2
y
0
+ g(t + s)
_
=
t+s
_
x
0
y
0
_
.
Le curve considerate costituiscono dunque lo spazio delle soluzioni di un sistema dinamico.
Lo si riconosce direttamente derivando le (1.95):
x = y
0
+g t = y, y = g.
Il campo vettoriale che genera il usso considerato `e pertanto X = y i + g j.
Esempio 1.14.4 Loscillatore armonico. Sul piano ane riferito a coordinate carte-
siane (x, y) si consideri il campo vettoriale
X = y i
2
x j
il cui sistema dierenziale `e
(1.96)
_
x = y,
y =
2
x.
Posto che
F =
F
x
x +
F
y
y =
F
x
y
F
y
2
x,
lequazione degli integrali primi diventa:
(1.97) y
F
x
2
x
F
y
= 0.
Questa si pu` o integrare per separazione delle variabili. Si cerca cio`e una sua soluzione del
tipo F(x, y) = A(x) +B(y). Con questipotesi lequazione (1.97) diventa (
`e il simbolo di
derivata prima)
y A
(x)
2
x B
(y) = 0,
32 Capitolo 1. Calcolo negli spazi ani
e quindi, subordinatamente alla condizione che i denominatori non si annullino,
y
B
(y)
=
2
x
A
(x)
.
Poiche il primo membro `e funzione solo della x e il secondo solo della y, entrambi devono
essere costanti. Posta per esempio questa costante uguale a 1, questultima equazione
si spezza in due equazioni dierenziali ordinarie separate, coinvolgenti cio`e ciascuna una
singola variabile:
2
x
A
(x)
= 1,
y
B
(y)
= 1,
ovvero
A
(x) =
2
x, B
(y) = y.
Si ha quindi, a meno di inessenziali costanti additive,
A(x) =
1
2
2
x
2
, B(y) =
1
2
y
2
.
Il procedimento della separazione delle variabili ha quindi successo. Eliminando lines-
senziale fattore
1
2
, abbiamo infatti trovato il seguente integrale primo, soluzione della
(1.97):
F(x, y) =
2
x
2
+y
2
.
Linsieme Q
c
denito dallequazione F = c `e vuoto (nel campo reale) per c < 0; si riduce
allorigine per c = 0 ed `e unellisse per c > 0. Infatti in questultimo caso
(1.98)
2
x
2
+ y
2
= b
2
posto c = b
2
. Si tratta di unellisse di semiassi a =
b
e b. Al variare di c si ottiene una
famiglia di ellissi, che sono orbite del campo X (percorse in senso orario, come si riconosce
facilmente valutando il campo in qualche punto del piano, per esempio sullasse x, vedi
Figura 1.6). Concludiamo pertanto che le curve integrali sono chiuse e quindi periodiche.
Dalla (1.98) si trae
y = b
_
1
x
2
a
2
_
a =
b
_
.
Scegliendo il segno + e sostituendo nella prima delle equazioni (1.96), si ottiene unequa-
zione dierenziale del primo ordine nella sola x, a variabili separabili:
dx
dt
= b
_
1
x
2
a
2
.
Il suo integrale generale risulta essere
(1.99) x = a sin(t + ),
con costante arbitraria. Sostituendo questa funzione nella seconda delle (??), si trova
dy
dt
=
2
a sin(t +),
1.14. Esempi 33
quindi:
(1.100) y = b cos(t + ).
La curva integrale cos` determinata, di equazioni parametriche (1.99) e (1.100), `e basata
nel punto (x
0
, y
0
) = (a sin, b cos ). Per ottenere il usso del campo occorre sostituire le
costanti (a, b) con i dati iniziali (x
0
, y
0
). Sviluppando la (1.99) e la (1.100) si trova:
(1.101)
_
x = x
0
cos t +
1
y
0
sint,
y = x
0
sin t + y
0
cos t.
`e interessante osservare che in questo caso il legame tra il vettore x
0
= (x
0
, y
0
) e il vettore
x = (x, y) `e lineare, sicche il legame x = (t, x
0
) pu` o porsi in forma matriciale:
_
`
............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
....................................................................................................................................................................................................................................................................................................................................................... ................
.... ... .. . . .. . . . .
x
y
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
..
.... ... .. . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . .. .. ..... ............................................................................................................................................................................................................... ... ..... ... .. .. .. .. . .. . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . .. . .. .. .. .. .... ................................................................................................................................................................................................................................................................................................................................................................................................................................... ......... .... ... .. .. .. .. .. . .. . .. . . .. . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . .. . .. . .. . .. .. .. .. ... ... ..... ..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
Figura 1.6: Orbite delloscillatore armonico.
(1.102)
_
_
x
y
_
_
=
_
_
cos t
1
sin t
sin t cos t
_
_
_
_
x
0
y
0
_
_.
In altre parole: il gruppo ad un parametro
t
; t R generato dal campo X `e un gruppo
di trasformazioni lineari rappresentato dalle matrici
t
=
_
_
cos t
1
sint
sin t cos t
_
_
`e un utile esercizio vericare che queste matrici godono della propriet` a di gruppo
t
s
=
t+s
.
34 Capitolo 1. Calcolo negli spazi ani
_
`
Figura 1.7: Le orbite del pendolo.
Nota 1.14.1 Sistemi dinamici lineari. Il sistema dinamico ora considerato rientra
nella particolare classe di sistemi dinamici lineari, cio`e del tipo
x = Ax,
con A matrice costante. Il usso generato da questi sistemi `e ancora lineare e pu` o essere
rappresentato dalla serie
t
= exp(At) =
+
k=0
t
k
k!
A
k
.
Nel caso precedente `e
A =
_
_
0 1
2
0
_
_
e quindi, essendo A
2
=
2
1, risulta
t
= cos t 1 +
1
sin t A,
a conferma della (1.101).
1.14. Esempi 35
Esempio 1.14.5 Il pendolo. Con questo esempio vediamo come la teoria n qui svi-
luppata si possa adattare al caso di un campo vettoriale tangenbte ad una supercie.
Consideriamo lo spazio ane tridimensionale riferito sia a coordinate cartesiane (x, y, z),
sia a coordinate cilindriche (r, , z). Consideriamo la supercie regolare Q denita dalle-
quazione r = R, con R costante positiva. Si tratta di un cilindro di raggio R e asse lasse
delle z. Intendendo langolo variabile nellintervallo aperto (, ), le coordinate (, z)
si possono interpretare come coordinate superciali, che mappano il cilindro Q, tolta una
sua direttrice, nella striscia aperta di R
2
denita da (, z) R
2
[ < < . Introdotti
i vettori (e
i
) associati a queste, cio`e i vettori (e
= R, e
z
= k), si consideri il campo
vettoriale
(1.103) X = z e
2
sin e
z
.
Il sistema dierenziale del primo ordine corrispondente `e:
(1.104)
_
= z,
z =
2
sin .
La combinazione di queste due equazioni fornisce lequazione dierenziale del secondo
ordine
(1.105)
+
2
sin = 0,
detta equazione del pendolo semplice. Lequazione degli integrali primi diventa:
(1.106) z
F
2
sin
F
z
= 0.
Anche in questo caso, come nel precedente, il procedimento di integrazione per separazione
delle variabili ha successo. Si trova, a conti fatti, un integrale primo del tipo
(1.107) F(, z) =
1
2
z
2
2
cos .
Il campo ha due punti singolari: P
0
= ( = 0, z = 0) e il punto opposto P
1
= (, 0). Le
orbite di X sono le curve Q
c
sul cilindro di equazione
(1.108)
1
2
z
2
2
cos = c,
che possiamo anche scrivere
(1.109) z
2
= 2
2
(cos +e), e =
c
2
.
Per la realt` a di z deve essere c +
2
cos 0, quindi
2
c < +, vale a dire
1 e < +. Si hanno allora quattro possibilit` a. (I) Per c =
2
(cio`e e = 1) dalla
(1.108) si vede che non pu` o che essere = z = 0. Il questo caso lorbita Q
c
si riduce
al punto singolare P
0
. (II) Per c (
2
,
2
) (cio`e e (1, 1)) Q
c
`e una curva chiusa
simmetrica rispetto a P
0
, allasse z e allasse , di equazione
(1.110) z
2
= 2
2
(cos + cos
0
) (e = cos
0
).
36 Capitolo 1. Calcolo negli spazi ani
(III) Per c =
2
(cio`e e = 1) lorbita Q
c
ha equazione
z
2
= 2
2
(cos + 1) = 4
2
cos
2
_
2
_
,
e si spezza pertanto nelle due curve
z = 2 cos
_
2
_
che si chiudono nel secondo punto singolare P
1
e che chiamiamo curve limite. (IV) Per
c >
2
(cio`e e > 1) Q
c
si sdoppia in due curve chiuse simmetriche esterne alle curve limite
Figura 1.7.
Esempio 1.14.6 Il sistema dinamico di Lotka-Volterra.
20
In R
2
si consideri sul
dominio aperto D = (x, y) R
2
[ x > 0, y > 0 costituito dai punti aventi entrambe le
coordinate positive (primo quadrante) il campo vettoriale
(1.111) X = (a by) x i + (cx d) y j,
con (a, b, c, d) numeri reali positivi. Il corrispondente sistema dierenziale `e:
(1.112)
_
x = (a by) x,
y = (cx d) y.
Questo sistema costituisce il celebre modello di Lotka-Volterra per la dinamica di due
popolazioni, il cui numero di individui `e rappresentato dalle funzioni y(t) e x(t), la prima
predatrice della seconda, viventi in un ambiente isolato ideale. Lequazione degli integrali
primi diventa:
(a by) x
F
x
+ (cx d) y
F
y
= 0.
Ancora una volta questa si integra per separazione delle variabili, ponendo cio`e F(x, y) =
A(x) +B(y). Si trova che una soluzione `e
F(x, y) = c x d log x +b y a log y.
Lanalisi della funzione z = F(x, y) mostra che la supercie rappresentativa in R
3
`e
convessa verso il basso con un minimo nel punto P
0
di coordinate
x
0
=
d
c
, y
0
=
a
b
,
che `e punto singolare del campo X. Le orbite Q
c
, di equazione F = c, si ottengono allora
intersecando questa supercie con il piano z = c. Stante la convessit` a della supercie, le
orbite risultano delle curve chiuse, che circondano il punto singolare P
0
Figura 1.8. Di
qui si deduce che le curve integrali sono periodiche e che il campo `e completo (dunque
il numero degli individui delle due popolazioni ha un andamento periodico, sfasato; se in
particolare le condizioni iniziali corrispondano al punto singolare, il numero degli individui,
per entrambe le specie, `e costante nel tempo). Se si valuta il campo X in qualche punto
di D, si riconosce che le orbite vengono percorse in senso antiorario.
20
Alfred James Lotka, 1880-1849; Vito Volterra, 1860-1940.
1.15. Stabilit`a di punti critici 37
_
`
Figura 1.8: Il graco z = F(x, y) dellintegrale primo del sistema di Lotka-Volterra
e le proiezioni delle curve di livello.
1.15 Stabilit`a di punti critici
I punti critici di un campo vettoriale X sono i punti in cui X si annulla. Essi sono
caratterizzati dalla seguente propriet` a: un punto P
0
A `e critico di X se e solo se la
curva
P
0
: R A : t P
0
,
che associa ad ogni valore del parametro t il punto P
0
, `e la curva integrale massimale
di X basata in P
0
. Infatti lequazione caratteristica delle curve integrali x = X(x) `e
identicamente soddisfatta da
P
0
: il primo membro si annulla perche la curva ha valore
costante, il secondo si annulla perche P
0
`e punto critico.
Definizione 1.15.1 Un punto critico P
0
di un campo vettoriale X si dice stabile se
comunque si ssi un intorno aperto A di P
0
esiste un intorno B di P
0
tale che per ogni
P B la curva integrale massimale
P
: I
P
M di X `e tale che
P
(t) A per ogni t > 0,
t I
P
.
21
Un punto critico non stabile, per cui cio`e questa condizione non `e soddisfatta, si
21
In altre parole: per ogni intorno A esiste un intorno B tale che partendo da un qualunque punto di B e
seguendo una curva integrale, si resta sempre in A, almeno nel futuro, cio`e per t > 0.
38 Capitolo 1. Calcolo negli spazi ani
dice instabile. Un punto critico P
0
stabile si dice asintoticamente stabile se ammette
un intorno B tale che per ogni p B si ha
p
(t) P
0
per t +.
22
_
`
P
0
stabile. P
0
asontoticamente stabile.
Figura 1.9: Stabilit` a di un punto critico.
Si osservi che questa denizione di stabilit` a riguarda il futuro, tiene solo conto dello
sviluppo della curva integrale per t > 0.
La stabilit` a o linstabilit` a di un punto critico pu` o in certi casi essere riconosciuta indipen-
dentemente dalla conoscenza delle sue curve integrali (cio`e senza dover integrare il sistema
dinamico) attraverso opportuni criteri di stabilit` a o di instabilit` a. Tra questi, fondamentale
`e il criterio di Lyapunov:
23
Teorema 1.15.1 Se in un intorno di un punto critico P
0
del campo X esiste una
funzione reale dierenziabile W avente un minimo stretto in P
0
e inoltre tale che
(1.113) X, dW) 0,
allora il punto critico `e stabile. Se, escluso il punto P
0
, vale la disuguaglianza stretta, cio`e
se
(1.114) X, dW) < 0,
allora il punto critico `e asintoticamente stabile. Se invece `e
(1.115) X, dW) > 0,
allora il punto critico `e instabile. Una tale funzione prende il nome di funzione di
Lyapunov.
22
La condizione p(t) P
0
per t + signica che comunque si scelga un intorno U di P
0
esiste un t
1
tale che P (t) U per ogni t > t
1
.
23
Alexandr Michailovic Lyapunov, 1857 - 1918.
1.15. Stabilit`a di punti critici 39
Dimostrazione. Si pu` o sempre supporre W(P
0
) = 0 (aggiungendo eventualmente a W
una costante inessenziale). Siccome W ha un minimo stretto in P
0
, in un suo intorno (con
lesclusione di P
0
) si ha W > 0 e le superci di livello di equazione W = c con c > 0
sono dieomorfe a delle sfere (di codimensione 1). Si consideri in questintorno un tensore
metrico (denito positivo) qualsiasi ed il gradiente di W: grad(W) = dW
. Per il teorema
del gradiente questo campo `e ortogonale ad ogni supercie di livello W = c e sempre diretto
verso lesterno (cio`e nella direzione di W crescente). La condizione (1.113) si traduce in
grad(W) X 0 e mostra quindi che i due campi formano in ogni punto un angolo non
acuto. Ci` o sigica che il campo X `e sempre o diretto verso linterno delle superci di livello
o tangente a queste (o, in particolare, nullo). Una sua curva integrale, sempre nellintorno
considerato, tende quindi per t cescente a penetrare allinterno di ogni supercie di livello
o al pi` u a restare su una di queste. Si realizza in tal modo la condizione di stabilit` a del
punto critico. La condizione (1.114) signica che i due campi formano sempre un angolo
acuto e quindi che ogni curva integrale penetra sempre verso linterno di ogni supercie di
livello, tendendo necessariamente al punto P
0
. Di qui lasintotica stabilit` a. Se inne vale la
condizione (1.115), si ha la situazione opposta: ogni curva attraversa le superci di livello
verso lesterno e non pu` o quindi mai realizzare le condizioni imposte dalla denizione di
stabilit` a. 2
La precedente `e in eetti una dimostrazione intuitiva. Vediamo una dimostrazione
rigorosa nel solo caso della stabilit` a. Gli altri due casi si dimostrano con tecnica analoga.
Dimostrazione. Sia W una funzione di Lyapunov soddisfacente alla (1.113). Non `e
restrittivo supporre che sia W(P
0
) = 0 (e quindi W positiva nellintorno). Si osservi che
la condizione (1.113) equivale alla condizione
(1.116)
dW
dt
0
lungo ogni curva integrale di X. Questo signica che la funzione W ristretta alla curva
`e decrescente (per t crescente). Come arbitrario intorno di cui alla denizione di stabilit` a
si pu` o sempre considerare un intorno aperto A di P
0
a chiusura compatta. Il bordo (o
frontiera) A di A `e compatto, sicche la restrizione di W a A ammette un valore minimo
> 0, positivo perche nellintorno di P
0
, escluso P
0
, `e W > 0. Per la continuit` a di W esiste
un intorno B A di P
0
per cui W[B < (si applichi la denizione di continuit` a: siccome
W(P
0
) = 0, comunque si ssi un intorno I
= (, ) R dello zero esiste un intorno B
di P
0
tale che W(B) I
). Preso allora un qualunque punto P B e la corrispondente
curva massimale
P
: I
P
R, se esistesse un t > 0, t I
P
, per cui
P
(t) A (e quindi
P
(t) / A) risulterebbe W(
p
(t)) .
Daltra parte, lungo
P
, la funzione W `e decrescente per cui W(
P
(t)) W(
P
(0)) =
W(P) < : assurdo. 2
Nota 1.15.1 Tra le possibili funzioni di Lyapunov da utilizzarsi per provare la stabilit` a
vi sono gli integrali primi di X, per i quali nella (1.113) vale luguaglianza.
40 Capitolo 1. Calcolo negli spazi ani
_
`
Figura 1.10: Teorema di Lyapunov.
Esempio 1.15.1 Si consideri su R
3
il sistema dinamico
(1.117)
_
_
x = (c b) y z
y = (a c) z x
z = (b a) x y
dove a, b, c R e
a < b < c.
Queste equazioni sono equivalenti alle equazioni di Euler per la velocit` a angolare in un
moto rigido spontaneo (4.15). I punti degli assi coordinati sono tutti e soli i punti critici.
Dimostriamo che ogni punto critico (x
0
, 0, 0) (con x
0
,= 0) `e stabile costruendo una funzione
di Lyapunov. Come si `e detto nella Nota 1.15.1, gli integrali primi sono dei buoni candidati
per essere funzioni di Lyapunov. Il sistema dinamico (1.117) ammette i due integrali primi
F = x
2
+ y
2
+ z
2
, G = ax
2
+by
2
+cz
2
.
Lo si riconosce in base ai teoremi della dinamica del corpo rigido, ma `e comunque imme-
diato vericarlo direttamente:
_
F = 2(x x + y y +z z) = 2
_
(c b) + (a c) + (b a)
_
xyz = 0,
G = 2(ax x +by y +cz z) = 2
_
a(c b) +b(a c) +c(b a)
_
xyz = 0.
Se consideriamo la dierenza
G aF = (b a)y
2
+ (c a)z
2
,
questa `e ancora un integrale primo, `e sempre positiva e si annulla su tutto lasse x. Ha
dunque un minimo, ma non stretto, nel punto (x
0
, 0, 0). Si pu` o ottenere un minimo stretto
1.15. Stabilit`a di punti critici 41
aggiungendo a questa funzione un altro integrale primo, a valori sempre positivi o nulli,
nulli su di un insieme di punti che intersechi lasse x proprio nel punto critico. Un buon
candidato `e per esempio lintegrale primo (F x
2
0
)
2
. Infatti `e sempre positivo fuorche nei
punti di equazione F x
2
0
= x
2
+ y
2
+z
2
x
2
0
= 0, cio`e sulla sfera centrata nellorigine e
di raggio [x
0
[, quindi passante per il punto critico. In conclusione: la funzione
W = GaF + (F x
2
0
)
2
`e un integrale primo con un minimo stretto in (x
0
, 0, 0). `e dunque una funzione di Lyapunov
e la stabilit` a del punto critico `e dimostrata. Allo stesso modo si pu` o dimostrare che anche
i punti critici del tipo (0, 0, z
0
) con z
0
,= 0 sono stabili.
Capitolo 2
Cinematica del punto
_
La cinematica studia il moto dei corpi indipendentemente dalle cause che lo provo-
cano e dalle leggi siche che lo governano.
`
E quindi un ramo della meccanica avente
carattere puramente descrittivo, che propone modelli matematici per lo spazio sico
ed i corpi che in esso si muovono. La scelta di questi modelli non `e unica.
Il modello classico dello spazio sico osservato da un riferimento `e lo spazio ane
tridimensionale euclideo.
`
E un modello immediatamente percettibile ed accettabile
dal nostro intuito. Quando osserviamo lo spazio che ci circonda, anche a estreme
distanze, presupponiamo sempre la scelta di un riferimento, per esempio il nostro
laboratorio, il treno su cui viaggiamo, la Terra, un sistema di tre assi uscenti
dal Sole e diretti verso tre stelle sse, ecc. Identichiamo un riferimento con un
corpo rigido ideale, invadente tutto luniverso, o almeno quella parte di universo
in cui si evolve il sistema il cui moto vogliamo descrivere e studiare; questo corpo
rigido `e modellato nello spazio ane euclideo.
La scelta di un riferimento `e, a livello puramente cinematico, una questione di
pura convenienza descrittiva. Due riferimenti debbono essere considerati distinti
se i corrispondenti corpi rigidi sono in moto luno rispetto allaltro. Cos`, negli
esempi sopra citati, il nostro laboratorio e la Terra costituiscono un medesimo
riferimento, anche se la loro estensione, e quindi la scala dei fenomeni a cui li
rapportiamo, `e ben diversa. Si pone comunque il problema di stabilire i legami
che intercorrono tra gli enti cinematici associati ad un medesimo moto ma relativi
a due diversi riferimenti. A questo problema `e dedicato un paragrafo di questo
capitolo, ma su di esso si ritorner` a in capitoli successivi.
42
2.1. Cinematica del punto 43
_
`
Il concetto di moto si basa sui due concetti di spazio e di tempo. In questo capitolo
il ruolo del tempo `e ridotto a quello di parametro o di variabile indipendente.
Si vedr` a nei capitoli successivi come esso possa assumere un carattere diverso,
fondendosi con quello di spazio per costituire un unica struttura assoluta: lo spazio-
tempo.
Occorre inne scegliere un modello per il corpo o i corpi il cui moto si vuole stu-
diare. Il modello fondamentale, ed anche il pi` u semplice, `e quello di punto. Il
moto di un punto `e rappresentato da una curva nello spazio ane tridimensionale
euclideo. Questo modello `e accettabile solo se lestensione del corpo `e del tutto tra-
scurabile rispetto allestensione del suo moto e alle altre grandezze signicative che
intervengono nel fenomeno studiato. Un secondo modello fondamentale `e quello
di corpo rigido; esso `e adottato per quei corpi estesi le cui particelle matengono
sensibilemente invariate, durante il moto, le mutue distanze.
2.1 Cinematica del punto
Il moto di un punto `e rappresentato da una curva parametrizzata nello spazio ane
euclideo tridimensionale E
3
, cio`e da unapplicazione : I E
3
: t (t), con I intervallo
di numeri reali. La variabile indipendente t I `e il tempo e lintervallo di denizione I
rappresenta lestensione temporale del moto. Ad ogni istante t I corrisponde un punto
(t) E
3
, che denotiamo anche con P(t). Scelto un punto sso O E
3
, il moto di un
punto P(t) ammette una rappresentazione vettoriale
(2.1) OP = r(t),
la quale, con riferimento ad un sistema di coordinate cartesiane ortonormali (x, y, z) aventi
origine in O, si traduce in equazioni parametriche
(2.2)
_
_
x = x(t),
y = y(t),
z = z(t),
che forniscono la rappresentazione cartesiana del moto. Le funzioni
_
x(t), y(t), z(t)
_
sono le componenti del vettore posizione r(t) rispetto ad O:
1
(2.3) r(t) = x(t) i + y(t) j + z(t) k.
Supporremo queste funzioni di classe C
2
almeno. Da questa rappresentazione, con due
derivate temporali successive, si ricavano la velocit` a (istantanea) e laccelerazione del
1
`
E consuetudine in cinematica denotare con r, anziche con x come fatto in precedenza, il vettore posizione
di un punto nello spazio ane tridimensionale euclideo.
44 Capitolo 2. Cinematica del punto
punto
(2.4) v =
dr
dt
, a =
dv
dt
che sono a loro volta funzioni vettoriali di t. La velocit` a istantanea `e il limite del rapporto
incrementale della posizione rispetto al tempo
(2.5) v(t) = lim
h0
1
h
_
r(t +h) r(t)
_
e laccelerazione `e il limite del rapporto incrementale della velocit` a
(2.6) a(t) = lim
h0
1
h
_
v(t +h) v(t)
_
`e la derivata seconda del vettore posizione:
(2.7) a =
d
2
r
dt
2
Le tre funzioni vettoriali del tempo (r, v, a) sono gli enti cinematici fondamentali del
moto di un punto. Conveniamo di considerare i vettori v(t) e a(t) applicati nel punto
P(t). Limmagine (I) della curva rappresentatrice del moto prende il nome di orbita
o traiettoria. Si tratta di una curva non parametrizzata, che nei casi pi` u comuni `e un
sottinsieme (connesso) di una curva regolare dello spazio ane E
3
. La velocit` a `e tangente
allorbita. Le componenti di v e di a sono le derivate prime e seconde delle funzioni (2.2):
(2.8)
_
v = x i + y j + z k,
a = x i + y j + z k.
Consideriamo alcuni tipi particolari di moti.
1 Moto rettilineo uniforme. `e un moto con velocit` a vettoriale v costante, quin-
di caratterizzato dalla condizione a = 0. La rappresentazione vettoriale del moto `e di
conseguenza
(2.9) r = v t +r
0
,
dove r
0
`e la posizione del punto per t = 0. Lorbita `e una retta, percorsa con velocit` a
costante.
2 Moto circolare uniforme. Nel piano (x, y) ha una rappresentazione vettoriale del
tipo
(2.10) r(t) = r (cos t i + sint j),
2.1. Cinematica del punto 45
con (r, ) costanti (positive). Di conseguenza la velocit` a e laccelerazione sono
(2.11)
_
v(t) = r (sint i + cos t j),
a(t) = r
2
(cos t i + sin t j) =
2
r(t).
Segue che [v[ = r = costante e [a[ = r
2
= costante
2
. Laccelerazione `e sempre diretta
verso lorigine (centro del moto). La costante `e la velocit` a angolare.
3 Moto elicoidale uniforme. Ha una rappresentazione vettoriale del tipo
(2.12) r(t) = r (cos t i + sin t j) +vt k
con (r, , v) costanti. `e la composizione del moto circolare uniforme dellesempio pre-
cedente con un moto rettilineo uniforme parallelo allasse z. La velocit` a e laccelerazione
sono
(2.13)
_
v(t) = r (sint i + cos t j) +v k,
a(t) = r
2
(cos t i + sint j).
Entrambi sono vettori di modulo costante.
4 Moto uniformemente accelerato. `e un moto ad accelerazione a costante. Con
due integrazioni successive si ottiene:
(2.14)
_
v = a t + v
0
,
r =
1
2
a t
2
+ v
0
t +r
0
,
con v
0
ed r
0
velocit` a e posizione allistante t
0
. Se a = 0 si ritrova il moto rettilineo
uniforme. Se a ,= 0 e v
0
`e parallelo ad a (in particolare v
0
= 0) il moto `e rettilineo.
Se v
0
non `e parallelo ad a, il moto `e piano: il piano del moto `e individuato dalla terna
(P
0
, v
0
, a), con P
0
punto posizione iniziale. La traiettoria `e una parabola. Sono di questo
tipo i moti dei gravi.
5 Moto periodico. Un moto `e detto periodico se `e denito su tutto lasse temporale e
se esiste un numero T tale che per ogni t R
(2.15) r(t) = r(t +T).
Se un tal numero esiste, non `e unico (si osservi infatti che per ogni intero k, il numero
kT sostituito a T rende ancora valida la (2.15)). Il pi` u piccolo dei numeri positivi T per
cui vale la (2.15) `e il periodo, =
1
T
`e la frequenza, = 2 =
2
T
`e la pulsazione.
Un esempio `e il moto circolare uniforme. Si noti bene che in un moto periodico lorbita
`e chiusa e che anche la velocit` a e laccelerazione sono funzioni periodiche. Non `e vero il
viceversa: se un moto ha velocit` a periodica non `e detto che sia periodico (si pensi al moto
elicoidale uniforme).
2
Per le notazioni adottate si veda la Nota ?? a ne paragrafo.
46 Capitolo 2. Cinematica del punto
6 Moto piano. `e un moto la cui orbita giace su di un piano. Se ne vedranno alcuni
esempi notevoli.
Alla rappresentazione vettoriale del moto (2.1) possiamo aancare la rappresentazione
radiale di centro O, costituita da una coppia di funzioni del tempo (r(t), u(t)), una
scalare laltra vettoriale, tali che:
(2.16) r = r u, [u[ = 1, r > 0
Pertanto, in ogni istante t, u `e il versore del vettore posizione del punto rispetto al centro
O mentre r `e la sua distanza da questo. Una tale rappresentazione `e valida per moti non
passanti per il centro O. Se ad un certo istante t
0
il punto mobile passa per O, nel quale
u risulta indeterminato, pu` o essere conveniente una rappresentazione radiale (r(t), u(t))
estesa per continuit` a a t
0
, con la funzione r non ristretta a valori positivi (si pensi, per
esempio, al semplice caso del moto di un punto su di una retta per O di versore, costante,
u: nellattraversare O pu` o restare valida la rappresentazione (2.16) pur di lasciar assumere
ad r valori positivi, negativi e nulli).
Nota 2.1.1 Un ulteriore ente cinematico associato alla rappresentazione radiale, la cui
importanza sar` a messa in evidenza in seguito, `e la velocit` a areale rispetto ad un punto
O:
(2.17) v
ar
=
1
2
r v
Si pu` o dimostrare che se si considera larea A(t) della supercie descritta dal vettore
posizione r(t) a partire da r(0), allora la derivata
A coincide, in valore assoluto, con il
modulo della velocit` a areale. Lo si constata facilmente nel caso dei moti piani (come
vedremo pi` u avanti).
2.2 Rappresentazione in coordinate curvilinee
Nello spazio ane euclideo tridimensionale E
3
, oltre a coordinate cartesiane (x
) = (x, y, z)
associate ad un riferimento (O, c
) = (O, i, j, k), consideriamo un generico sistema di
coordinate curvilinee (q
i
) = (q
1
, q
2
, q
3
) su di un dominio D E
3
. Come si `e visto al 1.4,
un tale sistema `e denito da unequazione del tipo
(2.18) OP = r(q
i
) x
= x
(q
i
),
soddisfacente alla condizione dindipendenza, punto per punto, dei vettori coordinati
(2.19) e
i
=
i
r = J
i
c
(J
i
=
i
x
).
Siccome questi vettori sono funzioni delle coordinate q
i
ha senso considerarne le derivate
parziali
(2.20)
i
e
j
=
ij
r.
2.2. Rappresentazione in coordinate curvilinee 47
Esprimendo queste derivate secondo la base degli stessi vettori (e
i
), ponendo cio`e
(2.21)
j
e
i
=
k
ji
e
k
k
ji
=
j
e
i
, dq
k
)
risultano denite delle funzioni
k
ij
, dipendenti da tre indici. Esse prendono il nome di
simboli di Christoel
3
relativi alle coordinate q
i
. Questi simboli, stante la presenza
nella (2.20) di una derivata parziale seconda, sono simmetrici rispetto agli indici in basso:
(2.22)
k
ji
=
k
ij
.
Nota 2.2.1 I simboli di Christoel sono identicamente nulli se e solo se le coordinate
sono cartesiane. Dalla denizione (2.21) si vede infatti che `e identicamente
k
ji
= 0 se e
solo se i vettori e
i
sono costanti. Ci` o accade se e solo se le coordinate sono cartesiane.
Ci` o premesso, dato un sistema di coordinate q
i
su di un dominio D E
3
, il moto di un
punto (quando avviene tutto allinterno di D) si rappresenta con equazioni parametriche
(2.23) q
i
= q
i
(t).
Sostituite queste nella (2.18) si ottiene il vettore posizione in funzione del tempo. Scriviamo
allora, con abuso di notazione
(2.24) OP = r
_
q
i
(t)
_
= r(t).
Siccome il vettore posizione pu` o pensarsi dipendere da t attraverso le coordinate q
i
, risulta
v =
dr
dt
=
i
r
dq
i
dt
,
dove alle q
i
vanno sostituite le equazioni parametriche (2.23). Quindi
(2.25) v = v
i
e
i
posto
(2.26) v
i
=
dq
i
dt
= q
i
Si osserva allora che: nella rappresentazione di un moto in coordinate generiche le com-
ponenti della velocit` a, rispetto al riferimento associato e
i
, sono le derivate prime delle
funzioni rappresentatrici q
i
(t) (come nel caso della rappresentazione in coordinate carte-
siane).
Invece le componenti dellaccelerazione non sono le derivate prime delle componenti della
velocit` a v
i
, cio`e le derivate seconde delle funzioni q
i
(t). Infatti, derivando la (2.25) e
3
Elwin Bruno Christoel, 1829-1900.
48 Capitolo 2. Cinematica del punto
tenendo conto che i vettori e
i
dipendono dal parametro t attraverso le coordinate q
i
, si ha
successivamente:
dv
dt
=
dv
i
dt
e
i
+v
i
de
i
dt
=
dv
i
dt
e
i
+v
i
j
e
i
dq
j
dt
=
dv
i
dt
e
i
+v
i
v
j
k
ji
e
k
=
_
dv
i
dt
+v
j
v
h
i
jh
_
e
i
.
Risulta quindi
(2.27) a =
_
d
2
q
i
dt
2
+
i
jh
dq
j
dt
dq
h
dt
_
e
i
Si conclude che: le componenti dellaccelerazione in coordinate curvilinee non sono in
genere le derivate prime delle componenti delle velocit` a; a queste derivate seconde si deve
aggiungere una forma quadratica nelle componenti delle velocit` a, i cui coecienti sono i
simboli di Christoel.
2.2.1 Calcolo dei simboli di Christoel
I simboli di Christoel
k
ij
associati ad un sistema di coordinate q
i
si dicono pi` u precisa-
mente di seconda specie. Possono calcolarsi con la formula
(2.28)
k
ij
= g
kh
ijh
dove le funzioni
ijh
sono i simboli di Christoel di prima specie, calcolabili attraverso
le derivate delle componenti del tensore metrico con la formula
(2.29)
ijh
=
1
2
_
i
g
jh
+
j
g
hi
h
g
ij
_
Per dimostrarlo si pone per denizione
(2.30)
ijh
=
i
e
j
e
h
e si osserva, dalla denizione dei simboli di Christoel
k
ij
, che
k
ij
=
i
e
j
, dq
k
) =
i
e
j
e
k
=
i
e
j
e
h
g
hk
.
Per cui vale la (2.28). Si osserva inoltre che il secondo membro della (2.30) `e anche uguale
a
i
e
j
e
h
=
i
(e
j
e
h
)
i
e
h
e
j
=
i
g
jh
i
e
h
e
j
,
per cui, combinando i due risultati si ottiene luguaglianza
ijh
+
ihj
=
i
g
jh
.
2.2. Rappresentazione in coordinate curvilinee 49
Con la permutazione degli indici si ottengono altre due uguaglianze simili:
_
jhi
+
jih
=
j
g
hi
,
hij
+
hji
=
h
g
ij
.
Sommando membro a membro le prime due e sottraendo la terza, tenuto conto della
simmetria rispetto ai primi due indici dei simboli di Christoel di prima specie, si ricava
proprio luguaglianza (2.29).
2.2.2 Calcolo diretto delle componenti dellaccelerazione
Come si vedr` a pi` u avanti questosservazione `e di fondamentale importanza per lo svi-
luppo della meccanica. Le componenti covarianti dellaccelerazione rispetto ad un
qualunque sistema di coordinate (q
i
),
(2.31) a
i
= a e
i
,
legate alle componenti contravarianti a
i
dalla relazione
(2.32) a
i
= g
ij
a
j
,
si possono calcolare per via diretta con la formula
(2.33) a
i
=
d
dt
T
q
i
T
q
i
dove
(2.34) T =
1
2
v v =
1
2
g
ij
q
i
q
j
Infatti, osservato che
T
q
i
= g
ij
q
j
,
d
dt
T
q
i
=
h
g
ij
q
h
q
j
+ g
ij
d q
j
dt
,
T
q
i
=
1
2
i
g
jh
q
j
q
h
,
la (2.33) diventa
a
i
= g
ij
d q
j
dt
+
h
g
ij
q
h
q
j
1
2
i
g
jh
q
j
q
h
.
Ma, per la simmetria di q
j
q
h
e di g
hj
, si pu` o anche scrivere
a
i
= g
ij
q
j
+
1
2
_
j
g
hi
+
h
g
ij
i
g
jh
_
q
j
q
h
50 Capitolo 2. Cinematica del punto
e quindi, per la denizione (2.29) dei simboli di Christoel di prima specie,
(2.35) a
i
= g
ij
q
j
+
jhi
q
j
q
h
Di qui, con linnalzamento dellindice i si vedano la (2.28) e la (2.32) si conclude che
le equazioni (2.33) sono equivalenti alle (??). Si noti che una volta scritte le componenti
dellaccelerazione secondo la (2.33), risultano di conseguenza calcolabili immediatamente
i simboli di Christoel. Si noti ancora che la funzione T, che in dinamica si interpreta
come energia cinetica di un punto di massa unitaria, si pu` o formalmente ottenere
dallespressione del ds
2
sostituendo le derivate q
i
ai dierenziali dq
i
(e dividendo per 2).
Esempio 2.2.1 In coordinate polari sferiche (con colatitudine e longitudine ) risulta
dalla (??):
T =
1
2
_
r
2
+r
2
2
+r
2
sin
2
2
_
.
Calcoliamo gli ingredienti della (2.33):
_
_
T
r
= r,
T
= r
2
,
T
= r
2
sin
2
,
_
_
T
r
= r
_
2
+ sin
2
2
_
,
T
= r
2
sin cos
2
,
T
= 0.
Allora la (2.33) fornisce:
_
_
a
r
= r r (
2
+ sin
2
2
),
a
= r
2
+ 2 r r
r
2
sin cos
2
,
a
= r
2
sin
2
+ 2 r r sin
2
+ 2 r
2
sin cos
.
Queste sono dunque le componenti covarianti dellaccelerazione in coordinate polari. Le
componenti contravarianti (a
r
, a
, a
) si calcolano con la (2.32) tenendo conto che le
componenti della matrice diagonale inversa [g
ij
] sono
g
rr
= 1, g
=
1
r
2
, g
=
1
r
2
sin
2
.
Allora
a
r
= a
r
, a
=
1
r
2
a
, a
=
1
r
2
sin
2
.
Quindi:
_
_
a
r
= r r (
2
+ sin
2
2
),
a
=
+
2
r
r
sin cos
2
,
a
=
+
2
r
r
+ 2
cos
sin
.
2.3. Rappresentazione polare di un moto piano 51
Dal confronto con la formula generale (2.46) per le componenti dellaccelerazione, si
possono di qui calcolare i simboli di Christoel di seconda specie non identicamente nulli:
_
= r,
r
=
r
=
r
=
r
=
1
r
,
= r sin
2
,
= sin cos ,
= cot .
2.3 Rappresentazione polare di un moto piano
Nel piano riferito a coordinate polari (r, ) il vettore posizione `e dato da
(2.36) r = r u = r (cos i + sin j),
dove u = cos i + sin j `e il versore radiale. La velocit` a e laccelerazione assumono
quindi la forma
(2.37)
_
v = r u +r
,
a =
_
r r
2
_
u +
_
2 r
+r
_
.
dove `e il versore trasverso, ortogonale al versore radiale u nel verso di crescente,
quindi tale che
(2.38) = k u.
Infatti, derivando la rappresentazione radiale r = r u si trova
v = r u + r u.
Daltra parte
u =
du
d
d
dt
= ( sin i + cos j)
,
cio`e
(2.39) u =
.
Di qui segue la (2.37)
1
. Si osserva inoltre, derivando la (2.38) e tenendo conto della (2.39),
che
(2.40) =
u.
Allora, derivando ancora la (2.37)
1
si trova la (2.37)
2
. La velocit` a e laccelerazione risultano
decomposte nella somma di due vettori, uno parallelo al versore radiale u, la velocit` a
radiale e laccelerazione radiale rispettivamente, e uno ortogonale a questo, la velocit` a
trasversa e laccelerazione trasversa:
(2.41)
_
v
rad
= r u,
v
trasv
= r
,
_
a
rad
=
_
r r
2
_
u,
a
trasv
=
_
2 r
+ r
_
.
52 Capitolo 2. Cinematica del punto
Inoltre, dalla (2.36) e dalla (2.37)
1
segue per la velocit` a areale (2.17) di un moto piano
lespressione
(2.42) v
ar
=
1
2
r
2
k
Essa `e dunque un vettore ortogonale al piano del moto il cui modulo `e pari alla derivata
rispetto al tempo della funzione A(t) data dallarea descritta dal vettore r(t) a partire da
un istante pressato qualsiasi. Infatti, considerato un qualunque istante t e un incremento
positivo t del tempo, denotati con e A i corrispondenti incrementi dellangolo e
dellarea, risulta, nellipotesi che la funzione r sia crescente nellintervallo (t, t + t),
1
2
r
2
(t) A
1
2
r
2
(t + t) ,
quindi, dividendo per t > 0,
1
2
r
2
(t)
t
A
t
1
2
r
2
(t + t)
t
.
Per t 0 si trova
(2.43)
A =
1
2
r
2
Si osservi dalla (2.41)
4
che laccelerazione trasversa `e, a meno di un fattore
2
r
, la derivata
della velocit` a areale scalare:
(2.44) a
trasv
=
1
r
d
dt
_
r
2
_
=
2
r
A .
I vettori e
i
per le coordinate polari sono
(2.45) e
r
=
r
r = u, e
r = r .
Di qui segue che la e : rpmp2
2
pu` o anche scriversi
a =
_
r r
2
_
e
r
+
_
+
2
r
r
_
e
.
Le componenti dellaccelerazione in coordinate polari sono dunque:
(2.46) a
r
= r r
2
, a
=
+
2
r
r
,
Si vede allora, dal confronto con lespressione generale delle componenti dellaccelerazione,
che i simboli di Christoel non identicamente nulli delle coordinate polari piane sono
(2.47)
1
22
=
r
= r,
2
12
=
r
=
1
r
.
2.4. Rappresentazione intrinseca 53
2.4 Rappresentazione intrinseca
Nota lorbita di un punto si consideri su questa lascissa euclidea s avente origine in un
punto P
0
. Allora il moto `e completamente determinato dalla funzione
(2.48) s = s(t)
dette legge oraria del moto. Questa funzione infatti fa corrispondere ad ogni istante t I
la lunghezza (con segno) dellarco di orbita che separa il punto P(t) dal punto P
0
. Orbita
e legge oraria forniscono una descrizione completa del moto, scindendolo nella sua parte
puramente geometrica e nella sua parte temporale. In questa descrizione per la velocit` a e
laccelerazione sussiste la seguente rappresentazione intrinseca:
(2.49) v = s t, a = s t +c s
2
n
dove t, n e c sono il versore tangente, il versore normale principale e la curvatura
dellorbita, tutte funzioni di s. Per dimostrare le (2.49) ricordiamo dalla Geometria la
denizione di questi elementi intrinseci. Data la funzione r(t), con derivata x(t) = v(t),
si considera la funzione integrale
(2.50) s(t) =
_
t
0
[v(u)[ du.
`e la primitiva della funzione [v(t)[ tale che s(0) = 0. Si tratta di una funzione monotona
crescente di t (perche lintegrando `e positivo), quindi invertibile in una funzione t = t(s).
Se nellintervallo temporale I in cui si considera il moto si ha sempre v(t) ,= 0 (non vi
sono istanti di arresto) allora la funzione s(t) misura la lunghezza dellarco di traiettoria
compresa tra P
0
e P(t). Inoltre anche la funzione inversa t = t(s) `e derivabile. In questo
caso lascissa euclidea pu` o essere scelta come parametro per rappresentare lorbita. Il
vettore velocit` a in questa parametrizzazione `e
(2.51) t =
dr
ds
=
dt
ds
dr
dt
=
dt
ds
v
Si tratta di un vettore unitario perche per la denizione (2.50) si ha s = [v[ e quindi
[t[ =
dt
ds
[v[ =
[v[
s
= 1.
Dalla (2.51) segue subito la (2.49)
1
. Si considera quindi la derivata del versore tangente t
rispetto al parametro s e si pone
(2.52)
dt
ds
= c n
54 Capitolo 2. Cinematica del punto
assumendo c 0 e [n[ = 1. Si deniscono in tal modo due grandezze: lo scalare non
negativo c = c(s), detto curvatura della curva, e il versore n = n(s), detto versore
normale principale della curva. Si ha allora successivamente
a =
dv
dt
=
d s
dt
t + s
dt
dt
= s t + s
dt
ds
ds
dt
= s t + c s
2
n,
e anche la (2.49)
2
`e dimostrata.
Nota 2.4.1 Il versore n `e in ogni punto ortogonale a t, quindi allorbita, per eetto
della seguente propriet` a: sia u(s) una funzione vettoriale derivabile nella variabile reale
s; se il modulo di u `e costante allora la sua derivata `e un vettore ortogonale a u:
[u(t)[ = cost. = u
du
ds
= 0.
Infatti da u u = cost. segue:
0 =
d
ds
(u u) = 2
du
ds
u.
Si `e qui applicata la propriet` a, di dimostrazione immediata, che per la derivata di un
prodotto scalare vale la regola di Leibniz:
d
ds
(u v) =
du
ds
v + u
dv
ds
.
Analoga propriet` a vale per il prodotto vettoriale:
d
ds
(u v) =
du
ds
v + u
dv
ds
.
Nota 2.4.2 Dalla rappresentazione intrinseca (2.49) si osserva che laccelerazione `e la
somma di due vettori diretti secondo la tangente allorbita e alla normale principale,
(2.53) a
t
= s t, a
n
= c s
2
n,
che chiamiamo rispettivamente accelerazione tangente e accelerazione normale. Di
conseguenza, in ogni punto P dellorbita laccelerazione appartiene al piano individuato dai
versori (t, n), detto piano osculatore in P. Le funzioni s e s sono dette rispettivamente
velocit` a scalare e accelerazione scalare.
Esempio 2.4.1 Moto uniforme. `e per denizione un moto a velocit` a scalare costante,
quindi caratterizzato dalla condizione [v[ = cost. ovvero s = costante. Non esistono istanti
di arresto, a meno che non sia proprio v = 0, nel qual caso il punto `e immobile e la sua
orbita si riduce ad un punto. Al di fuori di questo caso lorbita ammette sempre il versore
tangente t. Dalla (2.49)
2
si vede che un moto `e uniforme se e solo se la sua accelerazione `e
sempre normale alla traiettoria. Esempi sono il moto rettilineo uniforme, il moto circolare
uniforme, il moto elicoidale uniforme, gi` a considerati.
2.4. Rappresentazione intrinseca 55
Esempio 2.4.2 Se consideriamo in un intervallo temporale t > 0 lincremento A
dellarea della supercie descritta da r nellintervallo (t, t + t), questo, a meno di inni-
tesimi di ordine superiore a t, `e pari allarea del triangolo formato da r(t) e dal vettore
s t, dove s `e lincremento darco euclideo. Ricordato il signicato geometrico del pro-
dotto vettoriale, questarea `e data da
1
2
s[r t[. Pertanto dividendo per t e passando
al limite per t 0 si trova:
A =
1
2
s [r t[ =
1
2
[r v[.
Si ha cos` una dimostrazione intuitiva della propriet` a della velocit` a areale v
ar
=
1
2
r v
(Nota 2.1.1).
Aggiungiamo ancora alcune osservazioni di carattere essenzialmente geometrico.
Nota 2.4.3 Dalla (2.52) si nota che lo scalare c misura la rapidit` a con cui cambia la
tangente alla curva al variare del parametro euclideo s. Se c ,= 0, linverso
=
1
c
prende il nome di raggio di curvatura della curva. Se t `e costante, la curvatura `e nulla
e il versore normale principale `e indeterminato. `e questo il caso delle rette. Infatti, se
t = cost. dalla (2.51) segue r(s) = s t +r
0
, con r
0
= r(0).
Nota 2.4.4 Il vettore unitario
(2.54) b = t n
prende il nome di versore binormale. In ogni punto della curva `e pertanto denita
una terna di versori fra lo ortogonali (t, n, b), detta terna fondamentale o triedro
fondamentale. Siccome per la derivazione di un prodotto vettoriale vale la regola di
Leibniz, si ha
db
ds
=
dt
ds
n +t
dn
ds
= t
dn
ds
.
Quindi la derivata di b `e ortogonale a t. Ma essa `e anche ortogonale a b, perche b ha
modulo costante. `e dunque necessariamente parallela a n. Si pone allora
(2.55)
db
ds
= n
Lo scalare = (s) cos` denito prende il nome di torsione della curva. La torsione d` a
la misura di quanto la curva si discosti da una curva piana. Le formule (2.52) e (2.55)
esprimono la derivata rispetto al parametro euclideo s dei versori t e b. La derivata di n
`e invece data dalla formula
(2.56)
dn
ds
= c t b
56 Capitolo 2. Cinematica del punto
che non introduce ulteriori caratteristiche scalari intrinseche della curva. Infatti da n =
b t segue:
dn
ds
=
db
ds
t +b
dt
ds
= n t +c b n.
Le formule (2.52), (2.55) e (2.56) sono chiamate formule di Frenet.
4
Esercizi 2.4.1.
1. Dimostrare che una circonferenza di raggio R ha curvatura costante pari a
1
R
.
2. Calcolare la curvatura e la torsione di unelica di raggio R e passo p. Ricordiamo che
lelica `e lorbita di un moto elicoidale, cio`e della composizione di un moto circolare uniforme
e da un moto rettilineo uniforme in direzione ortogonale al piano del moto circolare; inoltre
il passo `e la distanza tra due punti che si corrispondono dopo un giro completo nel moto
circolare.
3. Dimostrare che una curva `e piana se e solo se la sua torsione `e ovunque nulla. Sugge-
rimento: la condizione = 0 equivale (si veda la (2.55)) a b = costante, e questa implica
b r = costante; di qui far seguire che il moto `e piano. Viceversa, se la curva sta su di
un piano, sia il versore tangente che il versore normale principale sono tangenti al piano,
e quindi b `e ortogonale a questo, dunque `e costante; per cui = 0.
2.5 Moti centrali
Un moto si dice centrale se esiste un punto sso O A, detto centro del moto, tale
che il vettore accelerazione a(t) `e in ogni istante t parallelo al vettore OP = r(t). Questa
condizione di parallelismo si traduce nellequazione caratteristica dei moti centrali
(2.57) a r = 0
Unaltra caratterizzazione dei moti centrali `e la seguente.
Teorema 2.5.1 Un moto `e centrale se e solo se la velocit` a areale vettoriale `e costante:
(2.58) v
ar
= costante
Dimostrazione. Per la derivazione di un prodotto vettoriale vale la regola di Leibniz,
quindi:
d
dt
(r v) =
dr
dt
v +r
dv
dt
= v v +r a = r a,
per cui si ha 2 v
ar
= r v = costante se e solo se r a = 0. 2
`
E notevole il fatto che
Teorema 2.5.2 Un moto centrale `e un moto piano.
4
Jean Frederic Frenet, 1816-1900.
2.5. Moti centrali 57
Dimostrazione. Da OP v = 2v
ar
= cost. segue che il punto P(t) si trova sempre sul
piano per O ortogonale al vettore costante v
ar
. 2
In particolare si ha un moto rettilineo se e solo se la velocit` a areale `e nulla (lo chiamiamo
moto centrale degenere). Infatti la condizione OP v = 0 equivale al parallelismo tra
il vettore posizione OP e la velocit` a v, per cui il punto si muove su di una retta passante
per O.
Nello studio di un moto centrale `e conveniente utilizzare coordinate polari (r, ) sul piano
del moto, aventi polo nel centro O. Si denota con k il versore dellangolo ortogonale
a tale piano. Ricordata lespressione (2.43) della velocit` a areale in coordinate polari, dal
Teorema 2.5.1 segue che:
Teorema 2.5.3 In un moto centrale la grandezza
(2.59) c = r
2
`e costante: `e detta costante delle aree.
Nota 2.5.1 Si vede dalla (2.59) che in un moto centrale con c ,= 0 le funzioni r(t) e
(t) non si annullano mai. Dunque il punto non passa mai per il centro del moto e per un
osservatore posto nel centro O il punto P ruota sempre nella stessa direzione, con velocit` a
angolare tanto pi` u piccola quanto pi` u il punto P `e distante da O.
Nota 2.5.2 Se di un moto centrale si conoscono la costante delle aree c ,= 0, lequa-
zione polare r = r() della traiettoria e langolo
0
allistante t = 0, allora il moto `e
completamente determinato. Basta infatti calcolare lintegrale (si veda la (2.59))
(2.60) t() =
1
c
_
0
r
2
(x) dx.
Esso fornisce una funzione monotona, quindi invertibile in una funzione = (t) che
insieme allequazione della traiettoria r = r() denisce completamente il moto.
Nota 2.5.3 In un moto centrale non degenere la velocit` a e laccelerazione risultano de-
terminate dalla conoscenza dellorbita e della costante delle aree. Se infatti si rappresenta
lorbita con unequazione r = r(), allora la velocit` a e laccelerazione si calcolano con le
formule
(2.61) v = c
_
d
d
1
r
u +
1
r
_
, a =
c
2
r
2
_
1
r
+
d
2
d
2
1
r
_
u
dette formule di Binet
5
per quanto fossero gi` a note, sotto altra forma, a Isaac Newton
(1642-1727). Per dimostrare le (2.61) si osserva che
=
c
r
2
,
5
Jacques Binet, 1786-1856.
58 Capitolo 2. Cinematica del punto
e quindi:
r =
dr
d
= c
1
r
2
dr
d
= c
d
d
1
r
,
r =
d r
dt
=
d r
d
= c
d
2
d
2
1
r
=
c
2
r
2
d
2
d
2
1
r
.
Si sostituiscono allora queste espressioni di
, r e r nelle rappresentazioni polari della velo-
cit` a e dellaccelerazione, tenendo conto che per denizione di moto centrale laccelerazione
trasversa si annulla identicamente.
2.6 Dalle leggi di Kepler alla legge di gravitazione universale
Utilizzando la teoria dei moti centrali ed in particolare la seconda formula di Binet, si pu` o
facilmente dedurre la legge di gravitazione universale a partire dalle leggi di Keplero
6
di solito enunciate come segue:
I. Le orbite dei pianeti sono ellittiche e il Sole occupa uno dei fuochi.
II. Le aree descritte dal raggio vettore che va dal Sole ad un pianeta sono proporzionali ai
tempi impiegati a descriverle.
III. I quadrati dei tempi impiegati dai pianeti a percorrere le loro orbite sono proporzionali
ai cubi dei semiassi maggiori.
Queste leggi furono dedotte da una enorme massa di dati astronomici raccolti dal maestro
di Kepler, Tycho Brahe (1546-1601). I pianeti vengono rappresentati da punti mobili nel
riferimento centrato nel Sole, che `e un punto sso, con orientamento invariabile rispetto
alle stelle sse. La prima legge mostra innanzitutto che il moto di un pianeta `e piano. La
seconda legge aerma che la velocit` a areale rispetto al Sole `e costante. Di qui segue che il
moto di ogni pianeta `e centrale di centro il Sole.
La prima legge aerma che lorbita di ogni pianeta `e ellittica. Sappiamo che lequazione
dellellisse in coordinate polari centrate in uno dei fuochi `e
(2.62) r =
p
1 +e cos
,
dove
(2.63) p =
b
2
a
`e il parametro, con (a, b) semiassi maggiore e minore rispettivamente, e
(2.64) e =
_
1
b
2
a
2
1
6
Johann Kepler, 1571-1630.
2.7. Moti di un punto su di una supercie 59
`e leccentricit` a. Poiche il moto centrale, per il Teorema 2.5.3 sappiamo che `e possibile,
applicando la seconda formula di Binet, determinare laccelerazione a partire dallorbita.
Sostituendo allora lespressione
1
r
=
1
p
_
1 +e cos
_
nella seconda delle e:mc5 si ottiene semplicemente
(2.65) a =
1
r
2
u,
posto
(2.66) =
c
2
p
.
`e cos` dimostrato che laccelerazione di ogni pianeta `e diretta e orientata verso il Sole ed `e
inversamente proporzionale al quadrato della distanza dal Sole. Tutto questo segue dalle
prime due leggi di Keplero.
La terza legge, denotato con T il periodo di rivoluzione del pianeta, aerma che la quantit` a
a
3
T
2
non dipende dal pianeta. `e quindi un invariante del sistema solare. Da questa invarianza
segue luniversalit` a della legge e:mc9, cio`e che la costante che vi compare non dipende
dal pianeta. Infatti, per il signicato di velocit` a areale larea A = ab dellorbita ellittica
di un pianeta `e data da
A =
1
2
_
T
0
r
2
dt =
c
2
_
T
0
dt =
1
2
c T.
Vale quindi dalluguaglianza
ab =
1
2
c T.
Per il coeciente si ricava quindi lespressione
=
c
2
p
=
4
2
a
2
b
2
T
2
a
b
2
= 4
2
a
3
T
2
,
Per la terza legge questo `e un numero indipendente dal pianeta.
2.7 Moti di un punto su di una supercie
Si consideri una supercie regolare Q nello spazio ane euclideo tridimensionale. Data
una sua rappresentazione parametrica
(2.67) OP = r(q
i
) (i = 1, 2),
60 Capitolo 2. Cinematica del punto
il moto di un punto P(t) sulla supercie Q (pi` u precisamente sul dominio D Q delle
coordinate q
i
) si rappresenta con equazioni parametriche
(2.68) q
i
= q
i
(t) (i = 1, 2).
Infatti, sostituite queste nella (2.67) si ottiene il vettore posizione in funzione del tempo
(2.69) OP = r
_
q
i
(t)
_
= r(t).
Derivando rispetto al tempo si trova
v =
dr
dt
=
i
r q
i
,
cio`e
(2.70) v = q
i
e
i
essendo gli e
i
=
i
r i vettori coordinati, tangenti alla supercie e indipendenti in ogni suo
punto. Dunque le componenti della velocit` a secondo la base e
i
sono proprio le derivate
prime rispetto al tempo delle equazioni parametriche q
i
= q
i
(t).
Invece, come ora vedremo, le componenti dellaccelerazione non sono (solamente) le deri-
vate seconde di queste.
Partiamo da una considerazione di indole pi` u generale. Sia v(t) un vettore dipendente dal
tempo applicato in P(t) e tangente alla supercie.
_
`
Figura 2.1: Vettore v(t) lungo il moto di un punto su di una
supercie.
2.7. Moti di un punto su di una supercie 61
Supposto v(t) derivabile rispetto a t, e posto v = v
i
e
i
, per la sua derivata si ha successi-
vamente:
(2.71)
dv
dt
=
dw
i
dt
e
i
+v
i
de
i
dt
=
dw
i
dt
e
i
+ v
i
j
e
i
dq
j
dt
=
_
dv
k
dt
+
k
ji
dq
j
dt
v
i
_
e
k
+ B
ji
dq
j
dt
v
i
N.
Qui si `e richiamata la decomposizione (1.71)
i
e
j
=
k
ij
e
k
+B
ij
N
delle derivate dei vettori coordinati, secondo i vettori stessi e il versore normale alla su-
percie.
`
E dunque chiaro che la derivata di un vettore tangente alla supercie, lungo una
curva parametrizzata (un moto), in generale non `e pi` u tangente.
La derivata di v(t) risulta pertanto decomposta nella somma di un vettore ortogonale alla
supercie e di un vettore tangente
(2.72) D
(i)
v =
_
dv
k
dt
+
k
ji
dq
j
dt
v
i
_
e
k
a cui diamo il nome di derivata intrinseca o derivata interna del vettore v(t).
Fatte queste osservazioni, consideriamo il caso particolare, ma fondamentale, in cui il vet-
tore v(t) `e il vettore velocit` a (2.70). In tal caso la sua derivata coincide con laccelerazione
a e la (2.71) diventa
(2.73) a =
dv
dt
=
_
d
2
q
k
dt
2
+
k
ij
dq
i
dt
dq
j
dt
_
e
k
+ B
ij
dq
i
dt
dq
j
dt
N
Chiamiamo allora accelerazione intrinseca o interna la sola parte tangente alla super-
cie, cio`e la derivata intrinseca del vettore velocit` a:
(2.74) a
(i)
= D
(i)
v =
_
d
2
q
k
dt
2
+
k
ij
dq
i
dt
dq
j
dt
_
e
k
Nota 2.7.1
`
E importante osservare lanalogia tra questa formula e quella delle compo-
nenti dellaccelerazione (2.27) di un punto libero in uno spazio ane riferito a coordinate
generiche .
La (2.73) mette anche in evidenza che la componente normale alla supercie dellaccele-
razione fa intervenire solo la seconda forma fondamentale B della supercie, valutata sul
vettore velocit` a. Posto allora
(2.75) a
(N)
= B
ij
dq
i
dt
dq
j
dt
N
la (2.73) diventa
(2.76) a = a
(i)
+ a
(N)
62 Capitolo 2. Cinematica del punto
_
`
Figura 2.2: Accelerazione intrinseca.
2.8 Moti geodetici
Nello spazio ane euclideo tridimensionale un moto rettilineo uniforme `e per denizione un
moto a velocit` a vettoriale v costante, cio`e un moto ad accelerazione identicamente nulla:
a = 0. La traiettoria `e una retta. Un moto di questo tipo `e anche detto inerziale. Il
concetto di moto inerziale si pu` o estendere al caso di un punto mobile sopra una supercie
alla maniera seguente:
Definizione 2.8.1 Il moto di un punto su di una supercie si dice moto geodetico o
moto inerziale se laccelerazione intrinseca `e identicamente nulla:
(2.77) a
(i)
= 0
Chiamiamo geodetiche della supercie le orbite dei moti geodetici.
Siccome laccelerazione intrinseca `e la parte tangente alla supercie dellaccelerazione a(t),
dalla decomposizione ortogonale-tangente (2.76) segue che:
Teorema 2.8.1 Un moto `e geodetico se e solo se laccelerazione `e sempre ortogonale
alla supercie:
(2.78) a = a
(N)
Dalla (2.74) segue inoltre che i moti geodetici sono caratterizzati dalle equazioni dieren-
ziali
(2.79)
d
2
q
k
dt
2
+
k
ij
dq
i
dt
dq
j
dt
= 0
2.8. Moti geodetici 63
dette equazioni delle geodetiche.
`
E importante osservare che queste equazioni equi-
valgono al sistema di quattro equazioni dierenziali
(2.80)
_
_
dq
i
dt
= v
i
,
dv
k
dt
=
k
ij
v
i
v
j
,
nelle quattro funzioni incognite q
i
(t) e v
i
(t). Ne consegue che i moti geodetici sono le curve
integrali di un sistema dinamico X sopra lo spazio TQ dei vettori tangenti alla supercie Q.
Questo spazio pu` o essere interpretato come supercie di dimensione 4 immersa nello spazio
a 6 dimensioni dei vettori applicati di tutto lo spazio ane euclideo tridimensionale, oppure
come variet` a dierenziabile di dimensione 4 (come meglio si vedr` a in un successivo capitolo)
rappresentata dalle coordinate (q
i
, v
j
); le prime due sono coordinate sulla supercie Q, le
seconde sono le componenti dei vettori tangenti secondo queste coordinate. Al campo X
si d` a il nome (con abuso di linguaggio) di usso geodetico della supercie. A questo
campo vettoriale possiamo applicare tutte le considerazioni svolte per i sistemi dinamici
in generale. In primo luogo, in base al teorema di Cauchy, possiamo aermare che:
Teorema 2.8.2 Assegnato un vettore v
0
tangente ad una supercie regolare Q in un
punto P
0
, esiste uno ed un solo moto geodetico massimale (cio`e con estensione temporale
massimale) avente velocit` a v
0
per t = 0.
In secondo luogo possiamo considerare integrali primi delle geodetiche, cio`e integrali
primi del sistema dinamico (2.80). Questi sono, per denizione, funzioni sullo spazio TQ
a valori reali (o anche funzioni a valori vettoriali) costanti lungo le soluzioni del sistema
(2.80), cio`e lungo le geodetiche. Si tratta, nel nostro caso, di funzioni del tipo F(r, v),
cio`e dipendenti dal vettore posizione r e dalla velocit` a v, le quali, subordinatamente alla
condizione che il moto r(t) avvenga sulla supercie e che la corrispondente accelerazione
intrinseca sia nulla, soddisfano alla condizione
(2.81)
d
dt
F(r(t), v(t)) = 0
Ad esempio (esempio notevole) abbiamo
dv
2
dt
= 2 v a = 0
perche v `e tangente alla supercie mentre a, riducendosi al solo termine a
(N)
, `e ortogonale
a questa. Pertanto la semplice funzione v
2
, ovvero [v[, `e un integrale primo. Di qui segue
che:
Teorema 2.8.3 I moti geodetici sono moti uniformi.
64 Capitolo 2. Cinematica del punto
Possiamo riesaminare questa circostanza da un altro punto di vista, considerando la
rappresentazione intrinseca dellaccelerazione:
a = s t +c s
2
n.
Siccome il versore t tangente alla curva `e anche tangente alla supercie, la condizione
a = a
(N)
caratteristica dei moti geodetici equivale alle due condizioni
(2.82) s = 0, c s
2
n = B
ij
v
i
v
j
N.
La prima di queste riaerma che il moto `e uniforme ([v[ = s =cost.). La seconda mostra in
particolare che il versore normale principale alla curva `e parallelo (cio`e uguale o opposto) al
versore normale alla supercie. Osservato che luniformit` a del moto `e un fatto puramente
cinematico, mentre la condizione n = N `e essenzialmente geometrica, si deduce la
seguente propriet` a caratteristica delle geodetiche, propriet` a che pu` o essere assunta come
denizione:
Teorema 2.8.4 Una geodetica `e una curva tale che in ogni suo punto il versore normale
principale `e ortogonale alla supercie.
2.8.1 Interpretazione variazionale delle geodetiche
Le geodetiche di una supercie sono caratterizzate da una notevole propriet` a geometrica
la cui trattazione rientra nellambito del calcolo delle variazioni. Non disponendo per ora
di questo metodo di calcolo, possiamo ricorrere ad una aermazione di carattere intuitivo:
le geodetiche sono le curve a lunghezza stazionaria. Si vuol dire che se si ssano due
punti qualunque della supercie, tra tutte le curve tracciate su questa e aventi i due punti
come estremi, le geodetiche sono quelle di lunghezza stazionaria (in particolare minima)
rispetto a curve prossime. Gli esempi seguenti chiariranno questo concetto (si osserver` a
anche che di geodetiche congiungenti due punti pressati ne possono esistere pi` u di una,
anche innite). Una semplice interpretazione sica di questa denizione `e la seguente: se
un lo essibile `e teso su di una supercie liscia, esso traccia su di questa una geodetica.
2.8.2 Interpretazione dinamica delle geodetiche
Anticipiamo alcune considerazioni di carattere dinamico che saranno riprese nel capitolo
seguente. Si consideri un punto mobile sopra una supercie ssa. Lequazione dinamica
del moto `e ma = F
a
+F
r
, dove m `e la massa, F
a
`e il vettore rappresentante la forza attiva
agente sul punto ed F
r
`e la forza reattiva o reazione vincolare esercitata dalla supercie
sul punto. Si dice che la supercie `e liscia se la reazione vincolare `e sempre ortogonale a
questa. Si dice inoltre che il punto si muove di moto spontaneo se la forza attiva `e nulla,
cio`e se il punto `e soggetto alla sola reazione vincolare. In questo caso lequazione del moto
diventa semplicemente ma = F
r
. Se la supercie `e liscia, segue da questa equazione che
laccelerazione `e sempre ortogonale alla supercie, cio`e che la sua accelerazione intrinseca
`e sempre nulla. Pertanto: il moto spontaneo di un punto su di una supercie liscia `e un
moto geodetico.
2.8. Moti geodetici 65
2.8.3 Superci sviluppabili
La loro geometria interna `e, localmente, quella del piano euclideo.
Consideriamo per esempio un cilindro.
7
Se lo si taglia lungo una sua direttrice, lo si
sviluppa in una striscia del piano compresa tra due rette parallele. Un punto di una delle
due rette viene identicato con il punto ortogonalmente opposto sullaltra retta. Poiche
le geodetiche del piano sono le rette, le geodetiche del cilindro sono rappresentate, nello
sviluppo, o da rette parallele alle rette limite della striscia, o da segmenti di rette trasversi
alla striscia fra loro paralleli ed equidistanti. Pertanto, sul cilindro, esse d` anno luogo a delle
eliche Figura 2.3 eventualmente degeneri, cio`e direttrici o circonferenze. Due punti
distinti non giacenti su di una circonferenza sono congiungibili da innite geodetiche.
_
`
Figura 2.3: Geodetiche del cilindro.
Un cono `e invece sviluppabile in una parte di piano compresa fra due semirette a e
a
uscenti da un punto V (vertice). Un punto P a `e identicato col punto P
equidistante da V . Un caso particolare di geodetica `e fornito dalle semirette uscenti da V :
sono le direttrici del cono. Se vogliamo invece altre geodetiche, cominciamo col tracciare
una semiretta a partire da un punto A a, interna allo sviluppo del cono. Preso il punto
A
corrispondente allestremo A a, proseguiamo la geodetica con una semiretta che
parte da A
con lo stesso angolo di incidenza che la semiretta precedente ha in A, ma in
senso opposto rispetto al vertice V , come indicato in Figura 2.4.
Analogamente si procede sulle eventuali altre intersezioni di queste semirette con le semi-
rette limite.
7
Si sottintende circolare, retto.
66 Capitolo 2. Cinematica del punto
_
`
Figura 2.4: Geodetiche del cono.
Esempio 2.8.1 Quante intersezioni avr` a una geodetica del cono (non direttrice) con se
stessa? Si studi come varia questo numero al variare dellangolo di apertura del cono. Si
applichi questo studio per risolvere il seguente problema di statica: una collana costituita
da un lo sottile con appeso un ciondolo viene apppoggiata sopra un sostegno conico
circolare ad asse verticale, liscio. Quale deve essere lapertura di questo cono perche la
collana non si sli?
Esempio 2.8.2 La sfera. Sia O il centro di una sfera e sia r = OP il vettore posizione
di un generico punto P di questa. Osserviamo subito che la funzione (vettoriale) r v
`e un integrale primo delle geodetiche. Infatti, derivando questo prodotto e imponendo la
condizione a = a
(N)
caratteristica delle geodetiche si trova
d
dt
(r v) = v v + r a = r a
(N)
= 0,
perche a
(N)
`e parallelo ad N ed i vettori (r, N) sono paralleli. Allora lungo una geodetica
della sfera il vettore K = r v `e costante (si noti che tale vettore non pu` o essere nullo).
Questo implica che il vettore posizione r `e sempre ortogonale ad un vettore costante
K. Dunque il vettore r descrive necessariamente una circonferenza di raggio massimo,
intersezione della sfera col piano passante per il suo centro O e ortogonale a K. La stessa
propriet` a pu` o dimostrarsi, in via pi` u breve, utilizzando quanto gi` a noto per i moti centrali.
Infatti la condizione a = a
(N)
sulla sfera implica che laccelerazione `e sempre diretta verso
il suo centro: i moti geodetici della sfera sono dunque moti centrali di centro il centro della
2.8. Moti geodetici 67
sfera. Siccome i moti centrali sono piani e contengono il centro del moto, si conclude che
le orbite sono circonferenze massime.
_
`
. .. . . .. . .. .. .. .. .... ....... ...................................................................................................................................................................................................................................................................................................................................................................................................
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . .. . . . .. . . .. . . .. . .. . .. . .. .. . .. .. .. . .. .. .. ... .. .. ... .. ... .... ... .... ..... ........ ....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... .......... ...... ..... ... .... ... ... .. ... .. .. .. .. .. .. .. .. .. . .. .. . .. . .. . .. . . .. . . .. . . . .. . . . . .. . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
......
......
......
..... .
.. ... .
.. .. ..
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . .
. .. .
O
K
r
v
Figura 2.5: Geodetiche della sfera.
2.8.4 Superci di rotazione
Si consideri una supercie regolare di rotazione intorno ad un asse di versore u. Sia O
un punto qualunque di questo asse e sia r = OP il vettore di posizione di un generico
punto P della supercie. In questo caso la funzione u r v `e un integrale primo delle
geodetiche. Infatti, derivando questo prodotto misto, e imponendo la condizione a = a
(N)
caratteristica delle geodetiche si ha successivamente:
d
dt
(u r v) = u v v + u r a = u r a
(N)
= 0,
perche a
(N)
`e parallelo a N ed i vettori (u, r, N) sono complanari. Osserviamo ora che
il vettore u r `e tangente al parallelo passante per P e ha modulo pari alla distanza
del punto P dallasse di rotazione. Sicche, detto langolo formato tra questo e il
vettore velocit` a v ed osservato che questultimo per i moti geodetici ha modulo costante,
dallintegrale primo delle geodetiche u r v = costante deduciamo che:
Teorema 2.8.5 Per ogni curva geodetica su di una supercie di rotazione si ha
cos = cost.
dove `e la distanza dallasse di rotazione e `e langolo formato con il parallelo.
Questo `e il teorema di Clairaut.
8
8
Alexis Claude Clairaut, 1713-1765.
68 Capitolo 2. Cinematica del punto
_
`
Figura 2.6: Geodetiche di una supercie di rotazione.
Esempio 2.8.3 Si consideri il teorema di Clairaut nei casi sopra considerati (sono tutte
superci di rotazione). Nel caso del cilindro si riconosce immediatamente che le geodetiche
sono delle eliche, perche = costante. Nel caso del cono si vede che una geodetica,
allontanandosi dal vertice, tende asintoticamente a porsi perpendicolare ai paralleli, perche
crescendo , cos deve tendere a zero.
Capitolo 3
Cinematica del corpo rigido
Un corpo rigido `e un insieme di punti mobili che durante il moto mantengono inalterate
le mutue distanze. Nellanalisi cinematica di un corpo rigido si prescinde inizialmente dalla
sua forma, e anche dal fatto che esso sia costituito da un numero nito o innito di punti.
Il moto di un corpo rigido prende il nome di moto rigido. Un corpo rigido pu` o essere
rappresentato, in sintesi, da una quaterna di punti (P
0
, P
1
, P
2
, P
3
), vertici di un tetraedro
non degenere, le cui distanze sono costanti nel tempo. Noto il moto di questo tetraedro,
`e ben determinato il moto di ogni altro punto ad esso rigidamente collegato, detto punto
solidale.
Fissare un tetraedro (P
0
, P
1
, P
2
, P
3
) solidale al corpo rigido e quivale a scegliere una terna
solidale di vettori e
= P
0
P
( = 1, 2, 3), pensati applicati in un punto solidale P
0
.
Ogni moto rigido sar` a quindi rappresentabile come il moto di un punto P
0
insieme ad una
rotazione dipendente dal tempo R(t) che fornisce i vettori e
(t) come funzioni del tempo,
a partire a partire da una terna di riferimento c
di vettori ssati convenientemente.
I primi paragra di questo capitolo sono richiamate le nozioni fondamentali sulle rotazioni
nello spazio euclideo tridimensionale.
3.1 Rotazioni
Un endomorsmo ortogonale, o isometria, `e un endomorsmo R su di uno spazio
vettoriale euclideo (E, g) conservante il prodotto scalare, cio`e tale che
(3.1) R(u) R(v) = u v
per ogni coppia di vettori u, v E. Questa denizione equivale a:
(3.2) R(u) R(u) = u u
`
E infatti ovvio che la (3.1) implica la (3.2). Viceversa, se vale la (3.2) risulta
R(u + v) R(u +v) = (u +v) (u +v) (u, v E).
69
70 Capitolo 3. Cinematica del corpo rigido
Sviluppando ambo i membri di questuguaglianza e riutilizzando la (3.2) si trova lugua-
glianza (3.1). Dalla (3.1), per il fatto che la metrica non `e degenere, segue che Ker(R) = 0.
Di conseguenza R(E) = E. Ne deduciamo che un endomorsmo ortogonale `e un isomor-
smo. Per denizione di endomorsmo trasposto
1
la (3.1) equivale a R
T
R(u) v = u v
e quindi, per larbitrariet` a dei vettori, alla condizione
(3.3) R
T
R = 1 R
T
= R
1
Dunque le formule (3.1), (3.2) e (3.3) sono tutte denizioni equivalenti di endomorsmo
ortogonale. Poiche det R
T
= det R,
2
la (3.3) implica (det R)
2
= 1 cio`e
(3.4) det R = 1.
Le isometrie il cui determinante vale +1 sono chiamate rotazioni; quelle con determinante
1 rotazioni improprie. Lidentit` a 1 `e ovviamente una rotazione. Il prodotto di due (o
pi` u) rotazioni `e una rotazione. Il prodotto di due rotazioni improprie `e una rotazione. Il
prodotto di una rotazione per una rotazione impropria `e una rotazione impropria.
Linsieme di tutti gli endomorsmi ortogonali sopra uno spazio (E, g) `e un gruppo rispet-
to allordinaria composizione degli endomorsmi, cio`e un sottogruppo di Aut(E), detto
gruppo ortogonale di (E, g). Lo denotiamo con O(E, g). Le rotazioni formano un sotto-
gruppo, detto gruppo ortogonale speciale, che denotiamo con SO(E, g). Le rotazioni
improprie non formano ovviamente sottogruppo. Se due spazi vettoriali hanno uguale
dimensione e segnatura, allora i rispettivi gruppi ortogonali sono isomor.
Passando alle componenti, osserviamo che un endomorsmo R `e ortogonale se e solo se le
sue componenti R
j
i
rispetto ad una base qualsiasi vericano le uguaglianze
(3.5) g
ij
R
i
h
R
j
k
= g
hk
Queste si ottengono dalla (3.1) scritta per una generica coppia (e
h
, e
k
) di vettori della
base.
1
Ricordiamo che su di uno spazio vettoriale E dotato di un tensore metrico g (di qualunque segna-
tura) ad ogni endomorsmo lineare R: E E corrisponde lendomorsmo trasposto R
T
denito
dalluguaglianza R
T
(u) v = R(v) u.
2
Ricordiamo che il determinante di un endomorsmo R, qui denotato con det R, `e il determinante della
matrice delle sue componenti [R
j
i
] rispetto ad una base qualsiasi (ei) di E (si dimostra che non dipende dalla
scelta della base). Le componenti di un endomorsmo lineare sono denite dalluguaglianza R(ei) = R
j
i
ej.
Conveniamo che lindice in basso sia indice di riga, quello in alto di colonna. Il determinante di un
endomorsmo `e uguale al prodotto dei suoi autovalori. Il determinante di un endomorsmo e del suo
trasposto coincidono. Il determinante del prodotto di due endomorsmi `e il prodotto dei determinanti. Si
noti che la matrice delle componenti dellendomorsmo trasposto non `e la matrice tasposta (cio`e ottenuta
scambiando righe con colonne) se non in casi particolari: per esempio nel caso di una metrica denita
positiva e rispetto a una base canonica.
3.1. Rotazioni 71
Se lo spazio `e strettamente euclideo e se la base scelta `e canonica, allora le (3.5) diventano
3
(3.6)
n
i=1
R
i
h
R
i
k
=
hk
Ci` o signica che il prodotto della matrice [R
i
j
] per la sua trasposta `e la matrice unitaria.
Le matrici soddisfacenti a questa propriet` a sono dette matrici ortogonali.
Se la base `e canonica ma lo spazio non `e strettamente euclideo la formula (3.6) non `e pi` u
valida. In ogni caso, le matrici delle componenti in una base canonica degli endomorsmi
ortogonali (o delle rotazioni) di uno spazio di segnatura (p, q) formano un gruppo denotato
con O(p, q) (oppure SO(p, q)). Si denotano in particolare con O(n) e SO(n) i gruppi delle
matrici nn ortogonali, cio`e soddisfacenti alla (3.6), e di quelle ortogonali a determinante
unitario. La scelta di una base canonica stabilisce un isomorsmo tra O(E, g) e O(p, q).
Nota 3.1.1 Gli autovalori, complessi o reali, di un endomorsmo ortogonale in uno
spazio strettamente euclideo sono unitari: [[ = 1. Infatti, dallequazione R(v) = v
segue, applicando la coniugazione, lequazione R( v) =
v. Moltiplicando scalarmente
membro a membro queste due uguaglianze si ottiene R(v) R( v) =
v v. Poiche R `e
ortogonale si ha anche R(v) R( v) = v v. Di qui segue
= 1, come asserito.
Le rotazioni possono essere rappresentate, oltre che con matrici ortogonali, in vari altri
modi. Ne vediamo alcuni.
3.1.1 Rappresentazione mediante simmetrie
Ad un qualunque vettore a E corrisponde un endomorsmo S
a
denito da
(3.7) S
a
(v) = v 2
a v
a a
a.
Esso `e una simmetria rispetto al piano ortogonale ad a, nel senso che, come si verica
immediatamente,
S
a
(a) = a, S
a
(v) = v
per ogni vettore v ortogonale ad a. Di conseguenza S
a
`e unisometria, pi` u precisamente
una rotazione impropria. Infatti a `e un autovettore di autovalore 1 mentre ogni vettore
ortogonale ad a `e autovettore di autovalore +1, sicche lo spettro `e (1, 1, . . . , 1) e quindi
det S
a
= 1. Si pu` o dimostrare, ma la dimostrazione non `e semplice, che ogni isometria
`e il prodotto di simmetrie.
`
E invece pi` u facile dimostrare che due simmetrie S
a
e S
b
commutano se e solo se i corrispondenti vettori a e b sono dipendenti (allora le simmetrie
coincidono) oppure sono ortogonali.
3
In questo caso la matrice metrica diventa [gij] = [ij] col simbolo ij che vale 1 per i = j, e 0 per i ,= j.
`
E
il simbolo di Kronecker.
72 Capitolo 3. Cinematica del corpo rigido
3.1.2 Rappresentazione esponenziale
Dato un endomorsmo A, consideriamone tutte le sue potenze A
k
; k N e quindi la
serie
(3.8) e
A
=
k=0
1
k!
A
k
,
detta esponenziale di A. Questa `e convergente, nel senso che qualunque sia A e comun-
que si ssi una base di E, le n
2
serie di numeri reali date dalle componenti di e
A
sono tutte
convergenti (anzi, assolutamente convergenti) o, se si vuole, che tale `e la serie vettoriale
k=0
1
k!
A
k
(v),
qualunque sia il vettore v. Si osserva che se (
1
, . . . ,
n
) `e lo spettro di A allora lo spettro
di e
A
`e (e
1
, . . . , e
n
). Infatti da A(v) = v segue A
k
(v) =
k
v e quindi
e
A
(v) =
k=0
1
k!
A
k
(v) =
k=0
1
k!
k
v = e
v.
Lesponenziale di un endomorsmo non gode di tutte le propriet` a della corrispondente
funzione analitica. Per esempio luguaglianza
e
A+B
= e
A
e
B
non `e pi` u vera in generale. Lo `e se i due endomorsmi A e B commutano (col che
commutano anche gli esponenziali). Vale comunque la propriet` a
(e
A
)
T
= e
A
T
.
Di qui segue che:
Teorema 3.1.1 Se A `e antisimmetrico
4
allora e
A
`e una rotazione.
Dimostrazione. Si ha infatti:
e
A
(e
A
)
T
= e
A
e
A
T
= e
A
e
A
= e
(AA)
= 1.
Inoltre la condizione det e
A
= 1 segue dal fatto che nello spettro di un endomorsmo
antisimmetrico gli autovalori non nulli si distribuiscono in coppie di segno opposto, sicche
la loro somma `e uguale a zero. Allora, per quanto sopra detto,
det e
A
=
n
i=1
e
i
= e
P
n
i=1
i
= e
0
= 1. 2
4
Un endomorsmo A su di uno spazio vettoriale dotato di tensore metrico `e antisimmetrico se A
T
= A,
simmetrico se A
T
= A.
3.1. Rotazioni 73
3.1.3 Rappresentazione di Cayley
Se A `e un endomorsmo antisimmetrico allora lendomorsmo
(3.9) R = (1 + A)(1 A)
1
`e una rotazione.
5
Si verica infatti facilmente, utilizzando le propriet` a della trasposizione e
il fatto che i due endomorsmi 1A commutano, che RR
T
= 1. Un po meno immediata
`e la verica del fatto che det R = 1. Si ottiene quindi unulteriore rappresentazione
delle rotazioni in termini di endomorsmi antisimmetrici. Va osservato che la condizione
det(1 A) ,= 0, richiesta per la validit` a della (3.9), `e sempre soddisfatta in uno spazio
strettamente euclideo (metrica denita positiva). Infatti, questa equivale alla condizione
che 1 sia un autovalore di A, cosa impossibile perche in tali spazi gli autovalori non nulli
di un endomorsmo antisimmetrico sono immaginari puri.
3.1.4 Rappresentazione quaternionale
Questa e le rappresentazioni seguenti, al contrario delle precedenti, riguardano soltanto
le rotazioni
6
nello spazio euclideo tridimensionale E
3
. Si consideri nella somma diretta di
spazi vettoriali R E
3
lapplicazione binaria interna (prodotto) denita da
(3.10) (a, u)(b, v) = (ab u v, av +bu +u v)
e il prodotto scalare denito da
(3.11) (a, u) (b, v) = ab +u v.
Lelemento inverso `e denito da
(3.12) (a, u)
1
=
(a, u)
|(a, u)|
dove si `e posto
|(a, u)| = (a, u) (a, u) = a
2
+u
2
.
Quindi tutti gli elementi sono invertibili, fuorche quello nullo (0, 0), e si ottiene unalgebra
associativa, non commutativa, con unit` a (1, 0). Si pone per comodit` a (a, 0) = a e (0, v) =
v. Il prodotto scalare `e conservato dal prodotto interno, nel senso che
(3.13) |(a, u)(b, v)| = |(a, u)| |(b, v)|.
Da questa propriet` a segue per esempio che gli elementi unitari, cio`e quelli per cui |(a, u)| =
1, formano un sottogruppo del gruppo degli elementi non nulli.
Un modo conveniente per rappresentare questalgebra, e quindi riconoscerne facilmente
le propriet` a fondamentali, consiste nella scelta di una base canonica (i, j, k) dello spazio
5
Arthur Cayley, 1821-1895.
6
Cio`e quelle a determinante uguale a 1.
74 Capitolo 3. Cinematica del corpo rigido
vettoriale e nella rappresentazione di un generico elemento (a, u = bi + cj + dk) nella
somma formale
(3.14) a + b i + c j + d k,
detta quaternione. Il prodotto di due quaternioni, in conformit` a alla denizione (3.10),
`e lestensione lineare dei seguenti prodotti fondamentali:
(3.15) i
2
= j
2
= k
2
= 1, i j = k, j k = i, ki = j.
Denita questalgebra, ad ogni suo elemento non nullo (a, u) si associa unapplicazione
R : E
3
E
3
denita da
(3.16) R(v) = (a, u) v (a, u)
1
.
`e un utile esercizio dimostrare che: (i) il secondo membro denisce eettivamente un
vettore; (ii) lapplicazione cos` denita `e un endomorsmo ortogonale, anzi una rotazione;
(iii) lapplicazione
f : (R E
3
)0 SO(3)
denita dalla (3.16) `e un omomorsmo di gruppi.
In particolare possiamo restringere questapplicazione agli elementi unitari di R E
3
,
Osserviamo allora che, scegliendo una base canonica nello spazio euclideo, questi elementi
sono caratterizzati dallequazione (si veda la (3.14))
a
2
+b
2
+c
2
+d
2
= 1,
e quindi descrivono tutta la sfera unitaria S
3
R
4
. Risulta pertanto che: (i) la sfera S
3
ha una struttura di gruppo; (ii) esiste un omomorsmo di gruppi
: S
3
SO(3)
che costituisce un ricoprimento universale del gruppo delle rotazioni dello spazio euclideo
tridimensionale (questo termine `e proprio della teoria dei gruppi di Lie, argomento di
corsi superiori). Si osservi che ogni elemento di SO(3) ha come controimmagine due punti
opposti di S
3
.
3.1.5 Rappresentazione versore-angolo
Gli autovalori, complessi o reali, di un endomorsmo ortogonale in uno spazio strettamente
euclideo sono unitari: [[ = 1. Infatti, dallequazione R(v) = v segue, applicando
la coniugazione, lequazione R( v) =
v. Moltiplicando scalarmente membro a membro
queste due uguaglianze si ottiene R(v) R( v) =
v v. Poiche R `e ortogonale si ha
anche R(v) R( v) = v v. Di qui segue
= 1, come asserito.
Nel caso tridimensionale gli autovalori sono radici di un polinomio di terzo grado a coef-
cienti reali. Quindi almeno uno di essi `e reale, gli altri due complessi coniugati o reali.
3.1. Rotazioni 75
Imponendo la condizione che il prodotto di tutti e tre gli autovalori sia uguale a 1 = det R
si trova che lunico spettro possibile di una rotazione `e del tipo
(3.17) (1, e
i
, e
i
).
Ci` o premesso, se escludiamo il caso R = 1, il cui spettro `e (1, 1, 1), lunico autovalore reale
1 determina in maniera unica un sottospazio unidimensionale di autovettori che chiamiamo
asse della rotazione. La rotazione R`e allora univocamente rappresentata da una coppia
versore-angolo (a, ) dove a determina lasse di rotazione e langolo di rotazione.
Si osservi che le coppie (a, ) e (a, ) d` anno luogo alla stessa rotazione.
Teorema 3.1.2 La rotazione R
(a,)
opera su ogni vettore v secondo la formula
7
(3.18) R
(a,)
(v) = v + sin a v + (1 cos )(a v a v)
Dimostrazione. Anziche darne una dimostrazione diretta, verichiamone la validit` a.
Innanzitutto osserviamo che `e lineare in v. Per v = a fornisce
R
(a,)
(a) = a + sin a a + (1 cos )(a a a a) = a.
Dunque il versore a `e autovettore (con autovalore 1). Per v ortogonale ad a fornisce
R
(a,)
(v) = v + sin a v (1 cos ) v = sin a v + cos v.
Questo risultato mostra che R
(a,)
(v) giace sul piano ortogonale ad a perche entrambi
i vettori av e v sono tali. Siccome a v `e ortogonale a v, concludiamo che R
(a,)
(v) `e
il vettore v ruotato di un angolo intorno ad a. La formula `e valida. 2
La formula (3.18) fornisce la rotazione R
(a,)
a partire dalla coppia (a, ). Vediamo ora
come si pu` o, inversamente, determinare la coppia (a, ) a partire da unassegnata rotazione
R.
3.1.6 Angoli di Euler
Una rappresentazione classica delle rotazioni nello spazio vettoriale euclideo tridimensio-
nale, dovuta a Euler
8
e che ha notevoli applicazioni nella dinamica del corpo rigido e in
astronomia, `e basata sulla relazione fra una base canonica (c
) = (c
1
, c
2
, c
3
), detta terna
ssa, e i vettori e
= R(c
) formanti la terna ruotata. Gli angoli di Euler sono in
genere denotati con
, , ,
7
Detta formula di Rodrigues.
8
Leonhard Euler, 1707-1783.
76 Capitolo 3. Cinematica del corpo rigido
e sono detti rispettivamente angolo di precessione, angolo di nutazione, angolo
di rotazione propria. Essi sono illustrati in Figura 3.1 dove la terna e
`e il risultato
dellazione di una rotazione R su di una terna ssa c
.
9
_
`
c
1
c
2
c
3
e
1
e
2
e
3
N
...... .... ... .. ... . .. .. . .. . .. . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . .. . . .. . .. .. .. .. .. ... ..... ......... ................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
. . . . .
. . . . . . . . . .
. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . .. . . . . .. . . . .. . . . .. . .. . .. . .. . .. . .. .. .. .. .. .. ... .. ... .... ...... ................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ ..... ... ... .. .. .. . .. . .. . .
..
.
.
....
..
.
.
.
......
.
..
.
.
.
.
.
....
...
..
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.....
..
.
.
.
.
.
...
...
..
.
.
.
.
.
.
.
.
.....
...
..
.
.
.
.
.
.
.
.
.
.
........................................................................................................................................................................................................................................................................
...... . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
....................... . . . . . . . . . . . . . . .. . . . .
. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . ......................
.....................
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. .
.
.
.
. . . . . . . . . . .
. .
.
. . . . . . . .
.
.
. . . . .
. . . . . . . . . . . . . . . . .
.
.
. . . . . . . . . . . . . .
.
.
.
. . . . . . . . . .
.
.
. . . . . .
.
. . .
Figura 3.1: Gli angoli di Euler.
La rotazione R risulta essere la composizione, nellordine, di tre rotazioni, A, B e C che,
posto
a
= A(c
), b
= B(a
), e
= C(b
),
sono denite, nella rappresentazione versore-angolo, come segue.
A = (c
3
, ) :
_
_
c
1
a
1
= N,
c
2
a
2
,
a
3
= c
3
sso.
_
c
1
c
2
c
3
= a
3
a
2
N = a
1
A = (c
3
, )
....... ... ... .. .. . .. . .. . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . .. . . .. . .. .. .. .. .... .....................................................................................................................................................................................................................................................................................................................................................................................................................................................
. . . .
. . . . . . . .
. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
..... . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
............................................................................................................................................................................................................................
Fig. 3.1.A
9
Questa denizione ha senso per e
3
distinto da c
3
, cio`e per > 0. Ai tre angoli sono imposte di conseguenza
le limitazioni
(3.19)
8
<
:
0 < < ,
0 < 2,
0 < 2,
3.1. Rotazioni 77
Questa `e una rotazione di angolo intorno al versore c
3
, che porta c
1
in un versore N
che individua una retta detta linea dei nodi.
B = (N, ) :
_
_
b
1
= a
1
= N sso,
a
2
b
2
,
a
3
= c
3
b
3
= e
3
.
_
a
2
c
1
c
2
c
3
b
2
e
3
= b
3
N = a
1
= b
1
B = (N, )
.... .... ... ... .. .. . .. . . .. . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . .. . .. .. .. .. ... .... ...................................................................................................................................................................................................................................................................................................................................................................................................................................................
. . . .
. . . . . . . .
. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . .. . . . .. . . .. . . .. . .. . .. .. . .. .. .. .. ... ... ... ...... ..................................................................................................................................................................................................................................................................................................................................................................................................................................................... ....... ... .. .. .. .. . .. . . . ............................................................................................................................................................................................................................
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . .
.
.
.
. . . . . . . . . .
.
.
. . . . . . .
.
. . . .
. . . . . . . . . . . . . .
. .
. . . . . . . . . . .
. .
.
. . . . . . . . .
.
. . . . . .
. .
..... . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . ......................
.....................
. .. .. .. ... .. .. .. .. .. ... .. .. .. .. .. ... .. .. .. .. .. ... .. .. .. .. .. ... .. ......................
........... ........ ..
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . .
.
.
.
. . . . . . . . . .
.
.
. . . . . . .
.
. . . .
. . . . . . . . . . . . . .
. .
. . . . . . . . . . .
. .
.
. . . . . . . . .
.
. . . . . .
. .
Fig. 3.1.B
Questa `e una rotazione di angolo intorno al versore N, che porta c
3
nel versore nale
e
3
e denisce un piano ruotato individuato dai versori N e b
2
= B(a
2
) = BA(c
2
).
C = (e
3
, ) :
_
_
b
1
e
1
,
b
2
e
2
,
b
3
e
3
= b
3
sso.
_
c
1
c
2
c
3
e
1
e
2 e
3
= b
3
b
2
N
C = (b
3
, )
..... .... ... .. .. .. . .. . .. . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . .. . .. . .. .. .. ... ..... ..................................................................................................................................................................................................................................................................................................................................................................................................................................................
. . . .
. . . . . . . .
. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . .. . . . .. . . . .. . .. . .. . .. . .. .. .. .. .. .. ... ... ... ........ .................................................................................................................................................................................................................................................................................................................................................................................................................................................... ..... ... ... .. .. . .. . .. .
..
.
.
....
..
.
.
.....
..
.
.
.
.
.
.....
..
..
.
.
.
.
.
.
..
.
.
.
....
..
.
.
.
.
....
..
..
.
.
.
.
.
.....
..
..
.
.
.
.
.
.
.
.
............................................................................................................................................................................................................................
..... . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
................... . . . . . . . . . . . . . . . . .. . .
. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . ......................
.....................
. . . . . ...................... .....................
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . .
.
.
.
. . . . . . . . . .
.
.
. . . . . . .
.
. . . .
. . . . . . . . . . . . . .
.
.
. . . . . . . . . . .
. .
.
. . . . . . . .
.
.
. . . . . .
. .
Fig. 3.1.C
Questa `e una rotazione di angolo intorno al versore e
3
, che porta i vettori b
1
= N e b
2
alla congurazione nale (e
1
, e
2
).
Dalla Figura 3.1.C deduciamo immediatamente alcune uguaglianze che ci saranno utili nel
seguito:
(3.20)
_
_
N e
1
= cos ,
N e
2
= cos( +
2
) = sin ,
N e
3
= 0,
N = cos e
1
sine
2
(3.21)
_
_
N c
1
= cos ,
N c
2
= sin ,
N c
3
= 0,
N = cos c
1
+ sin c
2
78 Capitolo 3. Cinematica del corpo rigido
Deniti gli angoli di Euler, `e importante esplicitare tramite essi il legame che intercorre
tra la terna c
e la terna ruotata e
.
Teorema 3.1.3 I vettori della terna ruotata e
= R(c
) sono espressi in funzione
della terna ssa c
e degli angoli di Euller dalle formule:
(3.22)
_
_
e
1
= (cos cos sin cos sin) c
1
+ (cos sin + sin cos cos ) c
2
+ sin sin c
3
,
e
2
= (cos cos sin + sin cos ) c
1
+ (cos cos cos sin sin) c
2
+ cos sin c
3
,
e
3
= sin (sin c
1
cos c
2
) + cos c
3
.
Dimostrazione. Scriviamo le formule di Rodrigues (3.18) per queste tre rotazioni:
_
_
A(v) = v + sin c
3
v + (1 cos )(c
3
v c
3
v),
B(v) = v + sin N v + (1 cos )(N v N v),
C(v) = v + sin b
3
v + (1 cos )(b
3
v b
3
v).
Utilizziamole come segue.
10
1.
_
_
A(c
1
) = c
1
+ sin c
3
c
1
+ (1 cos )(c
3
c
1
c
3
c
1
),
A(c
2
) = c
2
+ sin c
3
c
2
+ (1 cos )(c
3
c
2
c
3
c
2
),
A(c
3
) = c
3
+ sin c
3
c
3
+ (1 cos )(c
3
c
3
c
3
c
3
).
Avendo posto a
= A(c
), risulta:
(3.23)
_
_
a
1
= N = cos c
1
+ sin c
2
,
a
2
= cos c
2
sin c
1
,
a
3
= c
3
.
2.
_
_
B(a
1
) = a
1
+ sin N a
1
+ (1 cos )(N a
1
N a
1
),
B(a
2
) = a
2
+ sin N a
2
+ (1 cos )(N a
2
N a
2
),
B(a
3
) = a
3
+ sin N a
3
+ (1 cos )(N a
3
N a
3
).
10
In questi calcoli si tenga presente che le terne ortonormali c, a, b e e sono tutte equiorientate. Di
conseguenza, per quel che riguarda i prodotti vettoriali, valgono le uguaglianza del tipo x
1
x
2
= x
3
,
x
2
x
3
= x
1
, x
3
x
1
= x
2
.
3.2. Moti di un corpo rigido 79
Avendo posto b
= B(a
), ed essendo a
3
= c
3
, N c
3
= 0, N = a
1
, risulta:
_
_
b
1
= a
1
,
b
2
= cos a
2
+ sin c
3
,
b
3
= cos c
3
+ sin a
1
c
3
.
Tenendo conto del punto 1:
_
_
b
1
= cos c
1
+ sin c
2
,
b
2
= cos (cos c
2
sin c
1
) + sin c
3
,
b
3
= cos c
3
+ sin (sin c
1
cos c
2
).
3.
_
_
C(b
1
) = b
1
+ sinb
3
b
1
+ (1 cos )(b
3
b
1
b
3
b
1
) = cos b
1
+ sinb
2
,
C(b
2
) = b
2
+ sinb
3
b
2
+ (1 cos )(b
3
b
2
b
3
b
2
) = cos b
2
sinb
1
,
C(b
3
) = b
3
+ sinb
3
b
3
+ (1 cos )(b
3
b
3
b
3
b
3
) = b
3
.
Essendo e
= C(b
),
_
_
e
1
= cos b
1
+ sinb
2
,
e
2
= cos b
2
sinb
1
,
e
3
= b
3
.
Tenendo conto del punto 2,
_
_
e
1
= cos (cos c
1
+ sin c
2
) + sin[cos (cos c
2
sin c
1
) + sin c
3
],
e
2
= cos [cos (cos c
2
sin c
1
) + sin c
3
] sin (cos c
1
+ sin c
2
),
e
3
= cos c
3
+ sin (sinc
1
cos c
2
),
Di qui seguono le (3.22). 2
Dalle (3.22) si ricava la matrice delle componenti della rotazione R rispetto alla base (c
):
(3.24)
[R
] =
=
_
_
cos cos sin sin cos cos sin + sin cos cos sin sin
sin cos cos sin cos cos cos cos sin sin cos sin
sin sin cos sin cos
_
_
3.2 Moti di un corpo rigido
Facendo seguito a quanto si `e detto nellintroduzione al capitolo, basiamo la nostra analisi
dei moti rigidi sul fatto che un moto rigido `e caratterizzato da tre elementi:
80 Capitolo 3. Cinematica del corpo rigido
1. Una terna di riferimento o terna ssa di vettori unitari (c
) = (c
1
, c
2
, c
3
) tra loro
ortogonali, scelti a piacere e penstai applicati in un punto sso O.
2. Il moto di un punto P
0
(t).
3. Il moto di una terna solidale o terna mobile di vettori unitari tra loro ortogonali
(e
) = (e
1
, e
2
, e
3
) pensati applicati nel punto P
0
(t) vedi Figura 3.2 la cui dipendenza
dal tempo t `e descritta da unequazione del tipo
(3.25) e
(t) = R
t
(c
)
dove R
t
`e una rotazione dipendente dal tempo.
`
E chiaro che, essendo ogni R
t
un endomorsmo ortogonale, la terna solidale `e sempre
composta da vettori unitari e ortogonali. Di pi` u, essendo R
t
una rotazione, quindi con
determinante uguale a 1, la terna di riferimento e quella solidale sono sempre equiorientate.
_
`
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
........................................................................................................................................................................................................... ................ . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
O
P
0
(t)
P(t)
c
1
c
2
c
3
e
1
e
2
e
3
Figura 3.2: Rappresentazione di un moto rigido.
Premettiamo allora alcune considerazioni sugli endomorsmi di uno spazio vettoriale E
dipendenti da un parametro t I R. La derivata di un tale endomorsmo R
t
`e
lendomorsmo
R
t
denito da
(3.26)
R
t
= lim
h0
1
h
_
R
t+h
R
t
_
.
Questoperazione di derivazione `e lineare e per la derivata della composizione di due endo-
morsmi vale la regola di Leibniz (la dimostrazione della regola di Leibniz `e formalmente
analoga a quella relativa al prodotto di funzioni). Applicandola per esempio, nel caso in
3.2. Moti di un corpo rigido 81
cui R
t
sia invertibile, al prodotto RR
1
= 1 si ottiene luguaglianza
11
(3.27)
RR
1
= R(R
1
)
.
Per gli endomorsmi in uno spazio euclideo la trasposizione commuta con la derivazione,
vale cio`e luguaglianza
(3.28) (R
T
) =
R
T
.
Venendo al caso delle rotazioni, caratterizzate dalla condizione
(3.29) R
1
= R
T
,
se si applica R
t
ad un qualunque pressato vettore e
0
, si ottiene un vettore dipendente
dal parametro t, e
t
= R
t
(e
0
). La derivata rispetto a t di questo vettore `e data da
e =
R(e
0
),
quindi, essendo e
0
= R
1
(e), da
(3.30) e = (e)
posto
(3.31) =
RR
1
Si perviene cos` a determinare un endomorsmo
t
, dipendente dal tempo, che fornisce la
derivata rispetto al tempo di un qualunque vettore solidale al corpo rigido in movimento
formula (3.30).
Il fatto notevole `e che questo endomorsmo
t
`e antisimmetrico. Se lo si interpreta come
forma bilineare
12
si ha infatti, tenuto conto della (3.30),
(u, u) = (u) u = u u = 0,
perch`e u ha modulo costante. Nel caso di uno spazio vettoriale tridimensionale (le pre-
cedenti considerazioni valgono per uno spazio di dimensione e di segnatura qualsiasi) al
tensore antisimmetrico
t
corrisponde per aggiunzione
13
il vettore
(3.32) =
11
Omettiamo per semplicit`a il susso t quando non indispensabile.
12
Ad ogni endomorsmo lineare su di uno spazio vettoriale E dotato di un tensore metrico (di segnatura
qualunque) corrisponde una forma bilineare denotata ancora con e denita dalluguaglianza
(u, v) = (u) v.
Questa corrispondenza `e biunivoca. La simmetria (o lantisimmetria) di come forma bilineare corrisponde
alla simmetria (o antisimmetria) di come endomorsmo. Lantisimmetria di una forma bilineare , che
si esprime nelluguaglianza (u, v) = (v, u), `e anche caratterizzata dalla condizione (u, u) = 0 per
ogni vettore u E.
`
E proprio su questultima propriet`a che basiamo il nostro attuale ragionamento.
13
Vedi Nota 3.2.1 a ne paragrafo.
82 Capitolo 3. Cinematica del corpo rigido
detto vettore velocit` a angolare, per cui la (3.30) diventa
(3.33) u = u
Il vettore velocit` a angolare `e di fondamentale importanza nellanalisi dei moti rigidi.
Al vettore velocit` a angolare si pu` o giungere in altro modo. Data una terna solidale (e
) =
(e
1
, e
2
, e
3
), poniamo per denizione
(3.34) =
1
2
Si ha successivamente:
e
=
1
2
3
=1
(e
) e
=
1
2
3
=1
(
)
=
1
2
_
u
3
=1
u
_
=
1
2
_
u
+ u
_
= u
,
osservato che dalla condizione di ortonormalit` a segue u
+ e
=
_
e
_
=
0, quindi u
= e
, e che inoltre, essendo (e
) una terna ortonormale, per
qualunque vettore v vale luguaglianza
v =
3
=1
v e
.
Pertanto, denito con la (3.34), risulta
(3.35) u
= e
( = 1, 2, 3)
a conferma della (3.33). Le formule (3.35), di notevole importanza e valide per qualunque
terna solidale, sono chiamate formule di Poisson.
14
Nota 3.2.1 Ad ogni forma bilineare antisimmetrica corrisponde (in maniera biuni-
voca) un vettore aggiunto = denito dalluguaglianza
u = (u).
Loperazione, denotata con , che fa passare da forme bilineari simmetriche a vettori e
viceversa `e chiamata aggiunzione. In una base canonica (c
), se (
) sono le componenti
di un vettore allora la matrice delle componenti
= (c
, c
) della forma bilineare
antisimmetrica aggiunta = `e (il primo indice `e indice di riga):
[
] =
_
_
0
3
3
0
1
1
0
_
_
.
Sullutilizzo dellaggiunzione si ritorner` a al 5.10.
14
Simeon Denis Poisson, 1781-1840.
3.3. Formule fondamentali della cinematica del corpo rigido 83
3.3 Formule fondamentali della cinematica del corpo rigido
Nel paragrafo precedente sono contenuti tutti gli elementi necessari per enunciare e dimo-
strare i seguenti due teoremi fondamentali della cinematica del corpo rigido.
Teorema 3.3.1 In un moto rigido le velocit` a v
P
e v
Q
di due qualsiasi punti P e Q
solidali sono tali che ad ogni istante
(3.36) v
P
QP = v
Q
QP
Dimostrazione. Per due punti mobili vale luguaglianza
(QP) = (P Q) = v
P
v
Q
.
Se si deriva rispetto al tempo la condizione di rigidit` a QP QP = cost. si trova la (3.36).
2
_
................................................................................................................................................................................................................................................................................................
. ... ..
.... ..
... ...
.. ....
.. ... .
. ... ..
. ... ..
... ...
... ...
.. ... .
. ... ..
. ... ..
... ...
... ...
.. .
......
......
......
......
......
......
......
......
...........................................................................................................
...........................................................................................................
Q
P
v
Q
v
P
Figura 3.3: Prima formula fondamentale.
La (3.36) prende il nome di prima formula fondamentale della cinematica del cor-
po rigido. Essa mostra che le proiezioni delle velocit` a di due punti solidali sulla loro
congiungente sono uguali Figura 3.3.
Teorema 3.3.2 In un moto rigido ad ogni istante t esiste ed `e unico un vettore (t),
detto velocit` a angolare, tale che qualunque siano i punti P e Q solidali al corpo le loro
velocit` a v
P
e v
Q
in quellistante sono legate dalla relazione
(3.37) v
P
= v
Q
+ QP
Dimostrazione. Siccome P Q `e un un vettore solidale, per esso vale la formula (3.33),
per cui
(P Q)
= v
P
v
Q
= QP.
84 Capitolo 3. Cinematica del corpo rigido
Di qui la (3.37). Il fatto che sia unico `e ovvia conseguenza della stessa (3.37): se essa
sussistesse per un altro vettore
, sottraendo membro a membro le due equazioni si otter-
rebbe (
) QP = 0 per qualunque coppia di punti solidali; quindi necessariamente
= 0. 2
La (3.37) prende il nome di seconda formula fondamentale della cinematica del corpo
rigido. Si noti che, moltiplicata scalarmente per QP, la seconda formula fondamentale
implica la prima. La seconda formula fondamentale consente di calcolare, in ogni pressato
istante t, la velocit` a di un qualunque punto solidale P nota la velocit` a angolare e la velocit` a
di un solo punto solidale Q in quellistante. Essa consente quindi di descrivere latto di
moto rigido cio`e il campo vettoriale delle velocit` a dei punti solidali v: P v
P
in un
istante t ssato.
Una completa percezione dellatto di moto rigido si ha tuttavia attraverso il seguente
fondamentale teorema di Mozzi:
15
Teorema 3.3.3 In ogni istante t in cui ,= 0 esiste ed `e unica una retta a i cui punti
hanno velocit` a parallela a . La retta a, detta asse di Mozzi, `e parallela a .
Dimostrazione. I punti A dellinsieme a cercato sono caratterizzati dallequazione
v
A
= 0.
Per la seconda formula fondamentale v
A
= v
O
+ OA. Da questa si trae lequazione
(3.38) v
O
+
_
OA
_
= 0
nel vettore OA, dove il punto O ed i vettori e v
O
sono assegnati. Se questequazione
`e soddisfatta da un punto A essa `e soddisfatta anche per tutti i punti A
= A + k che
stanno sulla retta per A parallela ad :
v
O
+
_
OA
_
= v
O
+
_
OA
_
= 0.
Dunque il luogo cercato `e costituito da rette parallele a . Per dimostrare che esso si
riduce ad una sola retta, si consideri il piano per O contenente A e perpendicolare a . Qui
sopra lequazione (3.38), sviluppato il doppio prodotto vettoriale ed essendo OA = 0,
si riduce a
v
O
[[
2
OA = 0.
Questequazione denisce un solo punto A, intersezione del luogo cercato col piano. 2
Riscriviamo la formula fondamentale prendendo come punto di riferimento un punto A
dellasse di Mozzi:
(3.39) v
P
= v
A
+ AP.
Si osserva allora che la velocit` a v
P
di un generico punto P `e somma di un vettore v
A
parallelo ad , cio`e allasse di Mozzi, e di un vettore AP ortogonale ad il cui
15
Giulio Mozzi, 1730-1813.
3.3. Formule fondamentali della cinematica del corpo rigido 85
modulo cresce in maniera proporzionale alla distanza del punto P dallasse di Mozzi. La
gura 3.4 rappresenta il variare di v
P
al variare di P su di una semiretta ortogonale allasse
di Mozzi a. Per rappresentare landamento del campo v in tutto lo spazio occorre ruotare
tale gura intorno allasse di Mozzi e traslarla lungo questo.
_
`
............................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
............................................
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.................................................................................................................................................................................................................................................................................................
A
P
a asse di Mozzi
v
A
v
P
AP
Figura 3.4: Atto di moto rigido.
Si noti che le velocit` a dei punti di una retta parallela a , quindi allasse di Mozzi, sono
fra loro uguali. Si osserva inne direttamente dalla gura che sullasse di Mozzi le velocit` a
sono minime in modulo. Lasse di Mozzi `e dunque caratterizzato dalla seguente propriet` a,
che potrebbe essere assunta come sua denizione:
Teorema 3.3.4 In un atto di moto rigido con ,= 0 lasse di Mozzi `e il luogo dei punti
a velocit` a minima.
Nota 3.3.1 Atti di moto particolari. Le considerazioni precedenti mostrano che il
generico atto di moto `e elicoidale (le curve integrali del campo v sono delle eliche). Se
= 0 dalla (3.37) si vede che tutti i punti hanno istante per istante la stessa velocit` a. Si
`e in presenza di un atto di moto traslatorio. Se la velocit` a dei punti dellasse di Mozzi
`e nulla si dice che latto di moto `e rotatorio.
Nota 3.3.2 Distribuzione delle accelerazioni. Derivando la (3.37) rispetto al tempo
si trova la formula seguente, che fornisce laccelerazione istantanea a
P
di un qualunque
punto solidale P, nota laccelerazione a
Q
di un punto pressato Q, la velocit` a angolare
e la sua derivata :
(3.40)
a
P
= a
Q
+ QP + ( QP)
= a
Q
+ QP + QP [[
2
QP.
86 Capitolo 3. Cinematica del corpo rigido
3.4 Cambiamenti di riferimento
_
I concetti di moto, di velocit` a, di accelerazione sono concetti relativi: la loro
denizione presuppone la scelta di un riferimento. Come si `e gi` a detto, sceglie-
re un riferimento signica assumere come modello dello spazio sico, nellambito
delle teorie classiche, lo spazio ane tridimensionale euclideo. I punti di questo
spazio ane si identicano con delle particelle ideali costituenti un corpo rigido
invadente tutto luniverso. A ciascuna di queste particelle, con mutue distanze co-
stanti, attribuiamo un nome convenzionale, ricorrendo a sistemi di coordinate.
Possiamo quindi descrivere il moto di un punto esprimendo in funzione del tempo
le coordinate dei punti del riferimento via via occupati dal punto mobile.
Sia 1
0
un riferimento cartesiano nello spazio ane euclideo tridimensionale, costituito da
un un punto O
0
e da una terna di vettori ortonormali (c
0
), pensati applicati nel punto
O
0
.
Consideriamo un corpo rigido 1
1
in moto rispetto a 1
0
e rappresentato da un tetrae-
dro (O
1
, c
1
).
16
Questo corpo rigido pu` o essere considerato come un nuovo riferimento,
rispetto al quale osservare i fenomeni meccanici. Chiameremo 1
0
riferimento sso e 1
1
riferimento mobile.
Se osserviamo dai due riferimenti levolversi di un vettore u(t) dipendente dal tempo, esso
ammette una doppia rappresentazione:
(3.41) u = u
0
c
0
= u
1
c
1
,
la prima rispetto alla terna ssa (c
0
), la seconda rispetto alla terna mobile (c
1
).
Dello stesso vettore abbiamo due distinte derivate rispetto al tempo, una calcolata rispetto
alla terna ssa laltra rispetto alla terna mobile, che denotiamo con D
0
t
u e D
1
t
u, denite
rispettivamente da
(3.42) D
0
t
u = u
0
c
0
, D
1
t
u = u
1
c
1
,
dove le u
risp. u
1
sono le derivate della funzioni u
0
(t) risp. u
1
(t) rispetto alla
variabile t.
La seconda uguaglianza (3.42) `e giusticata dal fatto che, rispetto ad un osservatore posto
in R
1
i vettori c
1
sono costanti.
Teorema 3.4.1 Tra le due derivate D
0
t
u e D
1
t
u sussiste la relazione
(3.43) D
0
t
u = D
1
t
u +
10
u
dove
10
`e la velocit` a angolare della terna mobile rispetto alla terna ssa.
17
16
Qui cambiamo leggermente le notazioni rispetto al 3.2.
17
Cio`e del riferimento 1
1
rispetto al riferimento 1
0
.
3.4. Cambiamenti di riferimento 87
Dimostrazione. Applichiamo loperatore di derivazione D
0
t
alla seconda rappresentazio-
ne (3.41): D
0
t
u = D
0
t
(u
1
c
1
). Essendo u
1
e c
1
variabili rispetto al riferimento 1
0
, lope-
ratore D
0
t
si identica con lordinaria derivata rispetto alla variabile t sicche, applicando
la regola di Leibnitz, possiamo scrivere
D
0
t
u = u
1
c
1
+ u
1
c
1
.
Ma, per le formule di Poisson, c
1
=
10
c
1
e quindi, richiamate la denizione (3.42)
2
e
la (3.41)
2
,
D
t
u = u
1
c
1
+
10
(u
1
c
1
) = D
1
t
u +
10
u. 2
Dalla (3.43), ponendo u =
10
, segue che:
Teorema 3.4.2 Il vettore velocit` a angolare
10
di 1
1
rispetto a 1
0
ha la stessa
derivata temporale rispetto ad entrambi i riferimenti:
(3.44) D
0
t
10
= D
1
t
10
Teorema 3.4.3 Le derivate seconde di un vettore u(t) nei due riferimenti 1
0
e 1
1
sono legate dalla relazione
(3.45) D
0
t
2
u = D
1
t
2
u + 2
10
D
1
t
u +
10
u +
10
(
10
u)
dove si `e posto
10
= D
0
t
10
= D
1
t
10
.
FIN QUI
Dimostrazione. Applichiamo la (3.43) a se stessa::
D
2
t
u = D
t
(D
1
t
u +
1
u)
= D
1
t
(D
1
t
u +
1
u) +
1
(D
1
t
u +
1
u)
= D
1
t
2
u + D
t
1
u + 2
1
D
1
t
u +
1
(
1
u). 2
3.4.1 Il teorema dei moti relativi
Si consideri il moto di un punto P(t). Esso pu` o essere osservato dal riferimento 1 oppure
dal riferimento 1
1
. Tra il vettore posizione r = OP nel riferimento 1e il vettore posizione
r
1
= O
1
P nel riferimento 1
1
sussiste la relazione
(3.46) r = OO
+r
Denotiamo con
v = D
t
r, v
= D
t
r
88 Capitolo 3. Cinematica del corpo rigido
le velocit` a relative ai due riferimenti. Applicando loperatore D
t
alla (3.46), vista la (3.43),
si ottiene luguaglianza
(3.47) v = v
O
+v
+ r
,
dove
v
O
= D
t
(OO
)
`e la velocit` a del punto O
rispetto ad R. In virt` u della seconda formula fondamentale
della cinematica del corpo rigido il vettore
(3.48) v
tr
= v
O
+ O
P
che compare a secondo membro delluguaglianza (3.47) `e la velocit` a del punto P pensato,
nellistante considerato, solidale al riferimento, ovvero la velocit` a del punto solidale a R
che nellistante considerato `e occupato dal punto mobile P(t). A questa velocit` a si d` a il
nome di velocit` a di trascinamento. Possiamo allora enunciare il
Teorema 3.4.4 Teorema dei moti relativi: la velocit` a di un punto relativa ad un
riferimento R `e la somma della velocit` a relativa ad un altro riferimento R
e della velocit` a
di trascinamento, cio`e della velocit` a del punto solidale a R
istantaneamente occupato dal
punto mobile:
(3.49) v = v
+v
tr
3.4.2 Il teorema di Coriolis
Si consideri ora la derivata seconda delluguaglianza (3.46):
D
2
t
r = D
2
t
(OO
) + D
2
t
r
.
Tenuto conto della (3.45) applicata ad r
si ottiene subito
(3.50) a = a
O
+a
+ 2 v
+ r
+ ( r
),
dove
a
O
= D
t
v
O
= D
2
t
(OO
)
`e laccelerazione del punto O
rispetto a R. Per la formula (3.40) il vettore
(3.51) a
tr
= a
O
+ r
+ ( r
)
che compare a secondo membro della (3.50) `e laccelerazione del punto solidale a R
che
nellistante considerato `e occupato dal punto mobile P(t). A questo vettore si d` a il nome
di accelerazione di trascinamento. Al vettore
(3.52) a
c
= 2 v
3.5. Moti rigidi particolari 89
che pure compare nella (3.50), si d` a il nome di accelerazione complementare o acce-
lerazione di Coriolis.
18
Possiamo allora enunciare il seguente
Teorema 3.4.5 Teorema di Coriolis: laccelerazione di un punto relativa ad un
riferimento R `e la somma dellaccelerazione relativa ad un altro riferimento R
, dellacce-
lerazione di trascinamento, cio`e dellaccelerazione del punto solidale a R
istantaneamente
occupato dal punto mobile, e dellaccelerazione complementare:
(3.53) a = a
+ a
tr
+ a
c
Si noti bene che laccelerazione complementare a
c
si annulla identicamente quando `e sem-
pre nulla la velocit` a angolare: in tal caso, come vedremo al prossimo paragrafo, il moto di
R
rispetto a R `e traslatorio. Se in pi` u `e anche a
O
= 0, cio`e se il moto di R
`e traslato-
rio rettilineo uniforme (si veda il prossimo paragrafo), si annulla anche laccelerazione di
trascinamento e quindi
(3.54) a = a
Le accelerazioni nei due riferimenti sono dunque rappresentate dal medesimo vettore. Il
riferimento R
si dice allora equivalente a R.
3.5 Moti rigidi particolari
3.5.1 Moti traslatori
Definizione 3.5.1 Un moto rigido si dice traslatorio se ad ogni istante la velocit` a
angolare `e nulla: (t) = 0.
Teorema 3.5.1 Un moto rigido `e traslatorio se e solo se ogni vettore solidale al corpo
`e costante nel tempo.
Dimostrazione. Lo si deduce dalla formula (3.43): se D
u = 0 si ha lequivalenza
Du = 0 = 0. 2
Teorema 3.5.2 Un moto rigido `e traslatorio se e solo se ad ogni istante le velocit` a di
tutti i punti solidali coincidono (cio`e se e solo se in ogni istante latto di moto `e traslatorio).
Dimostrazione. Lo si deduce dalla seconda formula fondamentale: v
P
= v
Q
, P, Q solidali
= 0. 2
Tra i moti traslatori troviamo in particolare i moti traslatori rettilinei, in cui ogni
punto solidale si muove di moto rettilineo, e i moti traslatori rettilinei uniformi, in
cui ogni punto solidale si muove di moto rettilineo uniforme.
18
Gustave Gaspard Coriolis, 1792-1843.
90 Capitolo 3. Cinematica del corpo rigido
3.5.2 Moti rigidi con punto sso
Sono quei moti in cui uno dei punti solidali O ha sempre velocit` a nulla: v
O
= 0. La
seconda formula fondamentale diventa
(3.55) v
P
= OP.
Ogni punto solidale si muove su di una sfera di centro O. Lasse di Mozzi passa in ogni
istante t per il punto sso O, perche questo ha sempre velocit` a minima. Pertanto lasse di
Mozzi `e la retta parallela a passante per O. I suoi punti hanno tutti velocit` a istantanea
nulla. Lasse di Mozzi varia in genere da istante ad istante e descrive quindi una supercie
rigata, un cono C di vertice O, detta cono sso. Nel corpo rigido, inteso come riferimento
R
, esso descrive un secondo cono C
, detto cono solidale o cono mobile. Questi coni
prendono il nome di coni di Poinsot.
19
Teorema 3.5.3 In un moto rigido con punto sso il cono solidale rotola senza strisciare
sul cono sso.
Questenunciato, che fornisce una notevole interpretazione geometrica dei moti rigidi con
punto sso, richiede lintervento della denizione seguente.
Definizione 3.5.2 Si dice che una supercie regolare rigida C
rotola senza striscia-
re su di una supercie regolare rigida ssa C (si dice anche che il moto di C
su C `e di
puro rotolamento) se in ogni istante nei punti di contatto coincidono i piani tangenti
alle due superci e i punti solidali a C
a contatto con C hanno velocit` a nulla.
Dimostrazione. In ogni istante i due coni di Poinsot si toccano su una direttrice (lasse
di Mozzi in quellistante). Consideriamo una curva non parametrizzata sul cono solidale
C
trasversa alle direttrici. Per ogni istante t risulta denito un punto di contatto P(t)
che sta sulla curva. Il punto P si muove rispetto al riferimento R
solidale a C
con una
velocit` a v
tangente a C
e non parallela allasse di Mozzi. Siccome il punto si muove anche
sul cono sso C, la sua velocit` a v relativa al riferimento sso, rispetto al quale studiamo
il moto del corpo rigido, `e tangente a C. Per il teorema dei moti relativi v = v
+ v
tr
.
Ma in questo caso la velocit` a di trascinamento `e la velocit` a di un punto solidale che sta
sullasse di Mozzi, quindi nulla. Dunque v = v
. Ma entrambi questi vettori sono tangenti
ai rispettivi coni e non paralleli allasse di Mozzi. Dunque i piani tangenti ai due coni
coincidono. Inoltre, come gi` a si `e osservato, i punti solidali a C
che sono a contatto con
C si trovano sullasse di Mozzi e quindi hanno velocit` a nulla per cui le condizioni di puro
rotolamento richieste dalla Denizione 3.5.2 sono soddisfatte. 2
Nota 3.5.1 Poniamoci il problema di determinare il moto di un corpo rigido con un
punto sso conoscendone la posizione iniziale e la velocit` a angolare (t) a partire da t = 0.
Il moto rigido `e rappresentato da una rotazione R(t) in funzione del tempo. Dobbiamo
dunque determinare tale funzione.
19
Louis Poinsot, 1777-1859.
3.5. Moti rigidi particolari 91
Se denotiamo con (c
) una terna ssa e con (e
) = (i, j, k) una terna solidale (entrambe
ortonormali e centrate nel punto sso O) la posizione del corpo rigido `e denita dalle
equazioni
(3.56) e
= R(c
).
Un primo metodo consiste nellintegrare il sistema dinamico
(3.57)
R = R
nellincognita Rdove lendomorsmo antisimmetrico = `e noto in funzione del tempo.
Lequazione (3.57) si ricava direttamente dalla denizione (3.31) di : =
RR
1
.
Si tratta di un sistema a nove funzioni incognite, le componenti di R. Si osservi che
dallequazione (3.57) segue
d
dt
_
R
T
R
_
=
R
T
R+R
T
R = R
T
R+ R
T
R = 0.
Dunque se inizialmente R `e una rotazione, cio`e se R
T
R = 1, lo `e necessariamente per
tutti gli istanti. Quasi sempre per` o il vettore velocit` a angolare , ottenuto per esempio
integrando le equazioni di Euler, `e espresso in componenti non secondo la terna ssa (c
)
ma secondo la terna solidale (e
). La questione `e tuttavia immediatamente risolta perche
una propriet` a caratteristica delle rotazioni `e proprio quella di avere uguali componenti
rispetto alla terna ssa e alla terna solidale. Si ha infatti, tenuto conto della (3.56):
R(c
) c
= e
R
1
(e
) = e
R
T
(e
) = R(e
) e
.
Un secondo metodo, che in sostanza `e una riduzione del precedente, prende in consi-
derazione un vettore sso nello spazio c. Vale per un tale vettore lequazione del tipo
(4.150)
(3.58) c = c ,
dove la derivata temporale `e riferita al corpo rigido. Questequazione vettoriale si pu` o
intendere come sistema dinamico nellincognita c, noto il vettore in funzione del tempo.
Se si denotano con (, , ) le componenti di c secondo la terna solidale principale dinerzia,
rispetto alla quale ha componenti (p, q, r), la (3.58) si traduce nelle tre equazioni scalari
(3.59)
_
_
= r q ,
= p r ,
= q p .
Un integrale primo `e il modulo di c, cio`e la quantit` a
2
+
2
+
2
. Si pu` o quindi scegliere
c unitario. Se si fanno assumere inizialmente a c i tre valori (c
) della terna di riferimento
92 Capitolo 3. Cinematica del corpo rigido
ssa, si ricostruisce la matrice R.
20
Lintegrazione di questo sistema non `e in generale
riconducibile alle quadrature.
21
3.5.3 Moti rigidi con asse sso
Sono quei moti con una retta solidale di punti ssi. Questa retta `e evidentemente lasse di
Mozzi. Ogni punto del corpo rigido si muove di moto circolare intorno allasse. Se questo
`e individuato dal versore k di un tetraedro (O, i, j, k), allora la velocit` a angolare `e data
da
(3.60) =
k
dove `e langolo di rotazione, funzione del tempo, di versore k. Per dimostrarlo possiamo
per esempio ricorrere alla denizione (3.34), considerata una terna solidale (e
) con k = e
3
.
Per quanto si `e gi` a visto in cinematica del punto si vedano le formule (2.39) e (2.40)
si ha u
1
=
e
2
e u
2
=
e
1
. Per cui, essendo u
3
= 0, risulta
=
1
2
_
e
1
u
1
+ e
2
u
2
_
=
1
2
_
e
1
e
2
e
2
e
1
_
=
e
3
=
k.
3.5.4 Moti rigidi piani
Sono quei moti in cui un piano di punti solidali scorre su di un piano sso. Un moto
rigido piano `e, essenzialmente, il moto di un piano rigido
m
sopra un piano sso
f
.
Conviene allora scegliere la terna ssa (c
) e la terna solidale (o mobile) (e
) tali che
(c
1
, c
2
) giacciano sul piano sso
f
e che (e
1
, e
2
) giacciano su quello mobile
m
, per
cui si abbia di conseguenza c
3
= e
3
. Denotiamo con k questo terzo vettore unitario,
costantemente ortogonale ai due piani.
Come mostra il teorema seguente, `e abbastanza semplice determinare la velocit` a angolare
di un moto piano.
Teorema 3.5.4 Sia r una qualunque retta solidale al piano mobile
m
. Se si conosce,
come funzione del tempo, langolo (t) che essa forma col vettore e
1
della terna mobile,
orientato in maniera tale che k ne sia il versore, allora la velocit` a angolare istantanea `e
data da
(3.61) =
k
20
Si noti che, ssato c la conoscenza dei tre coseni direttori (, , ) rispetto alla terna solidale (i, j, k)
determina la posizione di questultima rispetto alla terna ssa soltanto a meno di una rotazione intorno a
c. Il vettore unitario c mobile rispetto al corpo e di componenti (, , ) prende il nome di vettore di
Poisson.
21
Per un primo approccio a questo problema si veda p.es. T. Levi-Civita, U. Amaldi, Lezioni di Meccanica
Razionale (Zanichelli), Vol. I, Cap. IV, 7.
3.5. Moti rigidi particolari 93
Dimostrazione. La dimostrazione `e formalmente simile a quella svolta per lanaloga
formula (3.60). 2
Segue che la velocit` a angolare, quindi lasse di Mozzi, `e sempre ortogonale al piano .
Definizione 3.5.3 Il punto C(t) intersezione dellasse di Mozzi a(t) con il piano sso
f
prende il nome di centro distantanea rotazione. Il punto C
v
(t) solidale a
m
che
nellistante considerato `e sovrapposto a C, e che quindi ha velocit` a nulla nellistante t,
prende il nome di centro delle velocit` a. Il punto C(t) descrive su
f
una curva P
detta polare ssa. Il punto C
v
(t) descrive su
m
una curva P
solidale a questo, detta
polare mobile.
In maniera del tutta analoga al caso del moto rigido con un punto sso (nel caso presente
i coni di Poinsot degenerano in cilindri e le loro intersezioni coi piani danno luogo alle
polari) si prova che:
Teorema 3.5.5 In un moto rigido piano la polare mobile ruota senza strisciare sulla
polare ssa.
Quindi, note queste due curve, il moto rigido piano `e geometricamente determinato. Per
determinarlo completamente occorre, per esempio, conoscere la legge oraria del moto di
C.
Per determinare il centro distantanea rotazione, e quindi le due polari, si pu` o in molti
casi utilizzare il teorema di Chasles:
22
Teorema 3.5.6 In un moto rigido piano ad ogni istante t per cui (t) ,= 0 il centro di-
stantanea rotazione `e lintersezione di due rette condotte per due punti solidali e ortogonali
alle rispettive velocit` a.
Dimostrazione. Siano P e Q due punti solidali al corpo. Se (t) ,= 0 latto di moto
`e rotatorio di centro C(t), quindi v
P
= CP e v
Q
= CQ e le rette CP e CQ
sono rispettivamente ortogonali a v
P
e v
Q
. Se PC `e parallela a QC, lintersezione di cui
allenunciato non esiste (va allinnito). Se cos` fosse per tutti le coppie di punti solidali
latto di moto sarebbe traslatorio, contro lipotesi (t) ,= 0. 2
Esempio 3.5.1 Si consideri il moto di unasta rigida di lunghezza i cui estremi A e B
sono vincolati a scorrere su due assi incidenti e ortogonali, assi x e y rispettivamente. Si
pensi al moto del piano solidale allasta sul piano sso (O, x, y). Per determinare le polari
si pu` o applicare il teorema di Chasles. Le velocit` a dei due estremi sono necessariamente
parallele ai rispettivi assi di scorrimento. Quindi il centro di istantanea rotazione C si trova
come intersezione delle rette per A e B e ortogonali agli assi. Per un osservatore solidale
col piano sso questo punto ha sempre distanza pari a dallorigine O: la polare ssa P
`e quindi la circonferenza di raggio e centro lorigine. Per un osservatore solidale allasta
invece, il punto C sottende sempre gli estremi A e B sotto un angolo retto; quindi la polare
22
Michel Chasles, 1793-1880.
94 Capitolo 3. Cinematica del corpo rigido
_
`
...............................................................................................................................................................................................................................................................................................................................
....................................
................... . . . . . . . . . . . . . .
0
P
Q
C
v
P
v
Q
Figura 3.5: Il teorema di Chasles.
_
`
............................................................................................................................................................................................................................................................................................................................................................................................................................................ . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
............................................................................................................................................................................................................................................................................................................................................................................................................................................ ....................
.. .... ... .. .. .. . .. . ..
x
y
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.............................
............ ....... ..... ..... ... ... ... ... ... .. .. ... .. .. .. .. .. . .. .. . .. .. . .. . .. . .. . . .. . . .. . . . .. . . . . . .. . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . .. . . . .. . . . .. . . .. . .. . .. . .. . .. .. . .. .. .. .. . .. ... .. .. .. ... ... ... ... ... .... ..... ...... ............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................. ................................................................................................................................................................................................................................... ....... .... ... ... .. .. .. .. .. .. . .. . .. . .. . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . .. . . .. . .. . .. .. . .. .. .. ... ... ... .... ....... .............................................................
O A
B C
P
P
Figura 3.6: Esempio 3.5.1
mobile `e la circonferenza di raggio
l
2
e centro il punto medio dellasta. Il moto dellasta
`e dunque geometricamente equivalente al moto di puro rotolamento di una circonferenza
di raggio
l
2
allinterno di una circonferenza ssa di raggio .
3.6 Moti rigidi composti
Consideriamo tre riferimenti 1
0
, 1
1
e 1
2
, ovvero tre corpi rigidi in movimento, rappre-
sentati da tre tetraedri (P
0
, c
0
), (P
1
, c
1
) e (P
2
, c
2
) (Figura 3.7).
3.6. Moti rigidi composti 95
_
`
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..............................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
0
c
0
1
c
0
2
c
0
3
P
0
1
1
c
1
1
c
1
2
c
1
3
P
1
1
2
c
2
2
c
2
1
c
2
3
P
2
Figura 3.7: Rappresentazione di un moto rigido.
Supponiamo, per ssare le idee, che il riferimento 1
0
sia immobile. Intervengono in questo
schema le tre rotazioni (dipendenti dal tempo)
_
_
R
10
di 1
1
rispetto a 1
0
,
R
21
di 1
2
rispetto a 1
1
,
R
20
di 1
2
rispetto a 1
0
,
1
0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......................
.....................
R
10
1
1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......................
.....................
R
21
1
2
........................................................................................................................................................
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
R
20
. . . . . . . . . . . . . ......................
.....................
e le corrispondenti velocit` a angolari
_
10
di 1
1
rispetto a 1
0
,
21
di 1
2
rispetto a 1
1
,
20
di 1
2
rispetto a 1
0
,
Ci proponiamo di calcolare la velocit` a angolare
20
in funzione delle altre due,
10
e
21
.
Teorema 3.6.1 Tra le tre velocit` a angolari sussiste la relazione
(3.62)
20
=
21
+
10
che chiamiamo legge di composizione delle velocit` a angolari.
96 Capitolo 3. Cinematica del corpo rigido
Dimostrazione. Per una corretta interpretazione della (3.62) e per la sua dimostrazione
occorre far capo al Teorema 3.4.1 e alla formula (3.43). Avendo tre coppie di riferimenti,
questultima d` a luogo a tre equazioni:
_
_
D
1
t
u = D
2
t
u +
21
u
D
0
t
u = D
1
t
u +
10
u
D
0
t
u = D
2
t
u +
20
u
Le ultime due forniscono luguaglianza D
1
t
u +
10
u = D
2
t
u +
20
u, cio`e
D
1
t
u D
2
t
u = (
20
10
) u.
Con lintervento della prima si ottiene
21
u = (
20
10
) u. Di qui la (3.62), stante
larbitrariet` a del vettore u. 2
3.7 Velocit`a angolare e angoli di Euler
Si `e visto al 3.1.6 che una rotazione R `e decomponibile nel prodotto di tre rotazioni,
R = CBA, denite, nella rappresentazione versore-angolo, da
A = (c
3
, ), B = (N, ), C = (b
3
, ),
dove (, , ) sono gli angoli di Euler. Se queste rotazioni dipendono dal tempo si ha un
moto rigido con un punto sso rappresentato da R(t).
Teorema 3.7.1 La veloci` a angolare di un moto rigido si esprime con la formula
(3.63) =
c
3
+
N +
e
3
dove (
,
,
) sono le derivate rispetto al tempo degli angoli di Euler (, , ) rispetto ad
una terna ssa (c
1
, c
2
, c
3
), e dove
(3.64) N = cos c
1
+ sin c
2
(3.65) e
3
= sin (sin c
1
cos c
2
) + cos c
3
Dimostrazione. In questo schema intervengono quattro riferimenti (o quattro corpi
rigidi) insieme alle tre rotazioni A, B e C:
1
0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......................
.....................
A
1
1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......................
.....................
B
1
2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......................
.....................
C
1
3
(c
1
, c
2
, c
3
) (e
1
, e
2
, e
3
)
3.7. Velocit`a angolare e angoli di Euler 97
Introducendo le relative velocit` a angolari, secondo le notazioni sopra adottate, e applicando
il Teorema 3.6.1, vale a dire due volte la formula (3.62), possiamo scrivere
=
30
=
32
+
21
+
10
,
dove
10
`e la velocit` a angolare di 1
1
rispetto a 1
0
,
21
`e la velocit` a angolare di 1
2
rispetto a 1
1
, ecc. Dunque si ha subito
10
=
c
3
. Per quel che riguarda
21
`e bene
osservare che, per come labbiamo denita, essa `e la velocit` a angolare di 1
2
rispetto a 1
1
,
supposto questo immobile. Dunque:
21
=
N. Inne, per la stessa ragione:
32
=
b
3
.
Per giungere alla (3.63) occorre ancora osservare, si veda la Figura 3.1.C, che b
3
= e
3
. La
(3.68) `e richiamata dalle (3.21), la (3.65) dalle (3.22). 2
Per lanalisi della dinamica dei corpi rigidi si riveler` a utile conoscere le espressioni delle
componenti della velocit` a angolare sia rispetto ad una base ssa sia rispetto ad una base
solidale.
Teorema 3.7.2 Le componenti (
1
,
2
,
3
) della velocit` a angolare rispetto alla base
ssa (c
1
, c
2
, c
3
) sono date da
(3.66)
_
1
=
cos +
sin sin,
2
=
sin
sin cos ,
3
=
+
cos .
Le componenti (p, q, r)
23
di rispetto alla terna solidale (e
1
, e
2
, e
3
) sono date da
(3.67)
_
_
p =
sin sin +
cos ,
q =
cos sin
sin ,
r =
cos +
.
Dimostrazione. Inserendo la (3.68) e la (3.65) nella (3.63) si trova
=
c
3
+
(cos c
1
+ sin c
2
) +
[sin (sin c
1
cos c
2
) + cos c
3
]
= (
cos +
sin sin) c
1
+ (
sin
sin cos ) c
2
+ (
+
cos ) c
3
.
Di qui le (3.66). Ritornando alla (3.63) abbiamo:
_
_
p = e
1
= (
c
3
+
N) e
1
=
c
3
e
1
+
N e
1
q = e
2
= (
c
3
+
N) e
2
=
c
3
e
2
+
N e
2
r = e
3
= (
c
3
+
N) e
3
+
=
c
3
e
3
+
N e
3
+
23
Si tratta di una notazione classica.
98 Capitolo 3. Cinematica del corpo rigido
Richiamiamo la (3.20), N = cos e
1
sine
2
:
_
_
p =
c
3
e
1
+
cos ,
q =
c
3
e
2
sin,
r =
c
3
e
3
+
.
Dalle (3.22) ricaviamo inne i prodotti scalari che ci servono:
_
_
e
1
c
3
= sin sin,
e
2
c
3
= cos sin,
e
3
c
3
= cos .
Inserendoli nelle equazioni precedenti si trovano le (3.67). 2
3.8 Moti di precessione regolare
Un esempio notevole di composizione di moti rigidi `e il moto di precessione regolare:
si tratta di un moto rigido composto di due moti rigidi con punto sso O, il primo di
velocit` a angolare costante
r
, detta velocit` a di rotazione propria, il secondo di velocit` a
angolare
p
, pure costante ma, si badi bene, costante nel corpo rigido, detta velocit` a di
precessione. Lo si realizza facendo ruotare un corpo rigido intorno ad un suo asse solidale
f, detto asse di gura, con velocit` a angolare
r
, ovviamente parallela a f, e facendo
quindi ruotare lasse f intorno ad un asse sso p passante per un suo punto O, detto asse
di precessione, con velocit` a angolare costante
p
. La velocit` a angolare del corpo rigido
risulta essere la somma
(3.68) =
p
+
r
dove, in base alla (3.62), il vettore
r
`e inteso solidale al corpo. Si dice allora, brevemente,
che in un moto di precessione la velocit` a angolare `e la somma di un vettore costante nello
spazio e di un vettore costante nel corpo.
In un moto di precessione i coni di Poinsot sono rotondi. Lasse di Mozzi a forma infatti
angolo costante sia con lasse di precessione che con lasse di gura. Dunque ogni moto di
precessione `e realizzabile facendo rotolare uniformemente un cono circolare retto C
su di
un cono sso C, pure circolare retto. Una precessione si dice progressiva o retrograda
a seconda che i due vettori
p
e
r
formino angolo acuto o ottuso. Nelle due gure che
seguono sono rappresentati i coni di Poinsot in un moto di precessione progressiva ed in
uno di precessione retrograda.
Nota 3.8.1 Un esempio notevole di moto di precessione `e quello della Terra intorno al
suo centro rispetto alle stelle sse. Sappiamo che la Terra ruota intorno al suo asse polare
f con velocit` a angolare costante. Ma lasse polare f non conserva rispetto alle stelle sse
3.8. Moti di precessione regolare 99
direzione invariabile. Esso infatti ruota uniformemente intorno ad un asse sso p passante
per il suo centro e ortogonale al piano delleclittica (cio`e al piano dellorbita terrestre
intorno al Sole) compiendo per` o un solo giro in circa 26 mila anni! (questo periodo prende
il nome di anno platonico). Si tratta di un moto di precessione retrograda. I coni di
Poinsot si congurano come nella prima della due immagini di Figura 3.9.
Soltanto che, mentre il cono sso ha unapertura lievemente superiore a 23
30
, il cono
solidale che gli rotola allinterno ha unapertura di soli 8,67 millesimi di secondo circa,
dovendo compiere un giro completo intorno allasse p dopo aver compiuto su se stesso un
numero di giri pari al numero dei giorni in un anno platonico (circa 9.400.000 giorni).
_
`
.. ... .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. .. ........................................................................................................................................................................................................................................................................
.......................................................................................................................................................................................................................................................................................................................................
. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .
........................................................................................................................................................................................................................................................................................................................................................................................................
p
C
....................................................................................................................................................................................................................................................................................................................................................................................................
a
O
.................. .. ... . .. .. . .. . . .. . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . .. ......................................................................................................................................................................................................
.......................................................................................................................................................................................................................................................................................
.......................................................................................................................................................................................................................................................................................
................................................................................................................................................................................................................................................................................................................................................................
f
C
.. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . ............................................................................................................................................................................................................................................. . . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .......................................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
........................................................................................................................................................................................................................................................................................................................................................................................................
.............................................................................................................................................................................................................................................................................................................................................................................................................
..........................................................................................................................................................................................................................................................................................................................................................................................................
p
C
C
a
O
f
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Figura 3.8: Coni di Poinsot in un moto di precessione progressiva.
100 Capitolo 3. Cinematica del corpo rigido
_
`
. . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . ..................................................................................................................................................................................................................................................................................................................................................................... . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . . .. . . . . . . .. . . . . . . .. .. ...............................................................................................................................................................................................................................................................................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................................................................................................................................
.............................................................................................................................................................................................................................................................................................................................................................................................
...............................................................................................................................................................................................................................................................................................................................................................................................................
p
C
C
f
O
a
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .......................................................................................................................................................................................................................................................................................................................................................................................................................................................................... .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . ... .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. .. .. . .. .. . .. ........................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................................................................................................................................
. . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . .. . . . . .. . . . .. . . . . .. . . . . ..
.....................................................................................................................................................................................................................................................................................................................................................................................
p
C
C
f
O
a
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
....
Figura 3.9: Sezione dei coni di Poinsot in due moti di precessione retrograda.
Capitolo 4
Meccanica newtoniana
_
`
Sorta dallopera di Galileo Galilei (Pisa 1564 - Arcetri 1642), consolidata da Isaac
Newton (Woolsthorpe 1642 - Kensington 1727) ed eretta a sistema da Leonhard
Euler (Basilea 1707 - Pietroburgo 1783), la meccanica razionale o meccanica
classica fornisce i primi fondamentali modelli matematici della sica. I corpi in
movimento sono rappresentati da singoli punti o da insiemi discreti o continui di
punti, mobili con o senza vincoli nello spazio ane tridimensionale euclideo oppure
in uno spazio ane a quattro dimensioni, lo spazio-tempo di Newton, dotato di una
particolare struttura metrica. Le sollecitazioni che provocano o modicano il moto
dei corpi sono rappresentate da vettori o anche, specialmente nella meccanica dei
continui, da tensori. In questo capitolo vengono esaminati i modelli matematici
fondamentali della meccanica razionale: punto libero, punto vincolato, sistema
nito di punti, corpo rigido. Gli aspetti puramente cinematici di questi modelli
sono gi` a stati trattati nel Cap. 2.
4.1 Dinamica del punto libero
Il modello pi` u semplice che la meccanica newtoniana adotta per i corpi in movimento `e
quello di punto materiale libero.
Definizione 4.1.1 Dicesi punto materiale una coppia (P, m) costituita da un punto
mobile nello spazio ane tridimensionale euclideo (che rappresenta lo spazio sico osser-
vato da un riferimento) e da un numero positivo m detto massa inerziale. Un punto
materiale si dice libero se pu` o assumere qualunque posizione nello spazio e qualunque
velocit` a.
La dinamica newtoniana del punto materiale `e fondata su princ`pi la cui discussione `e
argomento dei corsi di Fisica. Qui li formuliamo direttamente, mettendone in risalto gli
aspetti matematici.
101
102 Capitolo 4. Meccanica newtoniana
Principio I. Ogni azione atta a provocare il moto di un punto materiale `e rappresentata
da un vettore F detto forza. I moti conseguenti allazione di una forza F sono retti
dallequazione
(4.1) ma = F
dove a `e laccelerazione del punto. Per la forza F si postula una legge di forza cio`e una
sua dipendenza dalla posizione del punto, dalla sua velocit` a ed eventualmente dal tempo:
(4.2) F = F(r, v, t)
Principio II. Lazione simultanea di due (o pi` u) forze F
1
e F
2
`e rappresentata dalla loro
somma (principio di sovrapposizione delle forze) e il moto del punto `e allora retto
dallequazione
(4.3) ma = F
1
+F
2
.
La meccanica newtoniana non considera leggi di forza dipendenti dallaccelerazione. Una
forza attiva dipendente dalla sola posizione del punto prende il nome di forza posizionale
o campo di forza.
Come si `e detto, questi princ`pi presuppongono la scelta di un riferimento rispetto al
quale calcolare la posizione del punto, la sua velocit` a, la sua accelerazione. La denizione
di velocit` a e di accelerazione presuppongono anche la scelta di un parametro temporale.
La meccanica newtoniana postula con il seguente principio dinerzia lesistenza di una
classe privilegiata di riferimenti e di un tempo universale indipendente dalla scelta del
riferimento, parametro privilegiato rispetto al quale calcolare gli enti cinematici:
Principio III. Esistono dei riferimenti, detti riferimenti inerziali o galileiani, e un
tempo, detto tempo assoluto, rispetto ai quali un punto libero e isolato si muove di moto
rettilineo uniforme, detto moto inerziale.
In questenunciato per punto isolato sintende un punto non interagente con alcun cam-
po sico (gravitazionale, elettromagnetico, ecc.). Tra i moti inerziali, caratterizzati dal-
la condizione a = 0, vi `e in particolare la quiete. Questo principio ha due importanti
conseguenze.
Teorema 4.1.1 Due riferimenti inerziali si muovono uno rispetto allaltro di moto
traslatorio rettilineo uniforme.
Dimostrazione. Sia R un riferimento inerziale. Sia R
un corpo rigido in moto rispetto
a R. Supponiamo che R
denisca anchesso un riferimento inerziale. Consideriamo un
punto P libero e isolato, in quiete rispetto a R
. Questo punto si muove rispetto a R, che
`e inerziale, di moto rettilineo uniforme. Ma un tale punto P si pu` o pensare come punto
solidale a R
visto che `e in quiete rispetto a questo. Dunque tutti i punti solidali a R
si
muovono rispetto ad R di moto rettilineo uniforme. 2
4.1. Dinamica del punto libero 103
Teorema 4.1.2 Un punto libero e isolato si muove rispetto ad un qualunque riferimento
R come se fosse soggetto allazione di due forze, una forza di trascinamento ed una
forza di Coriolis, date rispettivamente da
(4.4) F
tr
= ma
tr
, F
c
= ma
c
dove a
tr
e a
c
sono laccelerazione di trascinamento e laccelerazione di Coriolis misurate
rispetto ad un qualunque riferimento inerziale.
Dimostrazione. Sia R
un qualunque riferimento inerziale. Per il teorema di Coriolis si
ha
a
= a +a
tr
+a
c
,
dove a
tr
e a
c
sono le accelerazioni di trascinamento e di Coriolis calcolate rispetto ad R
.
Se il punto si muove di moto inerziale in R
allora a
= 0 e quindi
a = a
tr
a
c
.
Moltiplicando per la massa m,
ma = ma
tr
ma
c
,
e dal confronto con la (4.1) si vede che il punto P si muove come se fosse soggetto alle
forze (4.4). 2
Nota 4.1.1 La forza di trascinamento e la forza di Coriolis si dicono forze apparenti
per distinguerle dalle altre forze, dette forze reali, dovute ad interazioni con altri corpi
o con campi sici. In conclusione: se il riferimento scelto per descrivere la dinamica di
un punto non `e inerziale, allora a secondo membro dellequazione fondamentale (4.1) alle
forze reali occorre aggiungere le forze apparenti. Queste svaniscono se il riferimento scelto
`e inerziale.
Vediamo ora le leggi di forza pi` u ricorrenti, cominciando dalle forze apparenti.
Nota 4.1.2 Forze apparenti. Abbiamo gi` a determinato le espressioni generali delle
accelerazioni di trascinamento e di Coriolis formule (3.51) e (3.52). Dalle deninizioni
(4.4) seguono allora per le forze apparenti le espressioni
(4.5)
_
_
_
F
tr
= m
_
a
O
+ r + ( r)
_
,
F
c
= 2 m v,
dove `e la velocit` a angolare del riferimento scelto rispetto ad un qualunque riferimento
inerziale, a
O
`e laccelerazione di un qualunque punto O solidale al riferimento scelto ri-
spetto ad un qualunque riferimento inerziale, r `e il vettore posizione del punto P rispetto
a O e inne v `e la sua velocit` a. Si noti che e a
O
sono funzioni vettoriali del tempo t,
sicche la forza di Coriolis `e in generale funzione di (v, t) mentre la forza di trascinamento
`e in generale funzione di (r, t).
104 Capitolo 4. Meccanica newtoniana
Nota 4.1.3 Forze reali. La Fisica considera varie leggi di forza. (I) La pi` u semplice
(usata per esempio nello studio della caduta di un grave) `e
F = mg = costante.
(II) La legge di forza
F = k r, k > 0,
`e usata per rappresentare la forza esercitata su di un punto in posizione r = OP da una
molla elastica perfetta a lunghezza a riposo nulla, avente estremi in O e P. (III) Una legge
di forza del tipo
F =
r
3
r =
r
2
u,
denita per r ,= 0, rappresenta lazione esercitata da una massa gravitazionale M posta
nel punto O su di un punto materiale P di massa gravitazionale m (la massa gravitazionale
viene identicata con la massa inerziale), posto
= GM m
con G costante di gravitazione universale. Rappresenta anche la forza esercitata da una
carica elettrica e
0
posta in O su di un punto materiale P dotato di carica elettrica e, posto
= e
0
e.
(IV) Una legge di forza del tipo
F = e
_
E(r, t)
1
c
B(r, t) v
_
,
detta forza di Lorentz,
1
rappresenta lazione meccanica esercitata da un campo elettro-
magnetico (E, B) su di una particella di carica elettrica e.
Abbiamo a questo punto tutti gli elementi necessari per la costruzione del modello ma-
tematico per la dinamica del punto libero: `e costituito semplicemente dallequazione
vettoriale
(4.6) ma = F(r, v, t)
combinazione dellequazione fondamentale (4.1) e della legge di forza (4.2). In conformit` a
al principio di sovrapposizione la funzione a secondo membro della (4.6) pu` o essere la
somma di pi` u leggi di forza. Se il riferimento scelto non `e inerziale tra gli addendi di F
dobbiamo includere la forza di trascinamento e la forza di Coriolis.
1
Hendrik Antoon Lorentz, 1853-1928.
4.1. Dinamica del punto libero 105
Assegnata la legge di forza, lequazione della dinamica (4.6) d` a luogo ad unequazione
dierenziale (vettoriale) del secondo ordine nellincognita r(t),
(4.7) m
d
2
r
dt
2
= F
_
r,
dr
dt
, t
_
equivalente (si veda la Nota 1.13.5) ad un sistema di equazioni del primo ordine nelle
funzioni incognite (r(t), v(t)),
(4.8)
_
_
dr
dt
= v,
dv
dt
=
1
m
F(r, v, t).
Se la forza `e indipendente dal tempo il sistema (4.8) `e autonomo. Se invece la forza dipende
dal tempo, ci si riconduce ad un sistema autonomo con larticio visto alla Nota 1.13.5,
aggiungendo unulteriore equazione con un parametro ausiliario equivalente al tempo t:
(4.9)
_
_
dr
dt
= v,
dv
dt
=
1
m
F(r, v, ),
d
dt
= 1.
Questi sistemi dierenziali del primo ordine corrispondono ad un campo vettoriale X,
rappresentante la dinamica di un punto materiale libero. Se la forza dipende dal tempo
si pu` o interpretare X come campo vettoriale dipendente dal tempo (sistema (4.8))
sopra lo spazio R
6
delle coppie posizione-velocit` a (r, v), oppure come campo vettoriale
sopra lo spazio R
7
delle terne posizione-velocit` a-tempo (r, v, ) (sistema (4.9)). Se la forza
non dipende dal tempo X `e un campo vettoriale ordinario sullo spazio delle (r, v). La
proiezione delle curve integrali di X sullo spazio R
3
delle posizioni r fornisce tutti i possibili
moti del punto. In base al teorema di Cauchy e subordinatamente alle opportune ipotesi di
regolarit` a del campo X e quindi della legge di forza, possiamo in conclusione aermare che:
ssata la posizione r
0
e la velocit` a v
0
di un punto libero ad un istante iniziale t
0
, risulta
univocamente determinato il suo moto cio`e una funzione r(t) soddisfacente allequazione
(4.7) ovvero alle equazioni (4.8) e tale che
r(t
0
) = r
0
, v(t
0
) = v
0
.
In un generico sistema di coordinate (q
i
) su E
3
, ricordata lespressione delle componenti
dellaccelerazione e denotate con F
i
le componenti della forza F, il sistema (4.8) si traduce
in un sistema di tre equazioni dierenziali del primo ordine del tipo
(4.10)
_
_
dq
i
dt
= v
i
,
dv
i
dt
=
i
hj
v
h
v
j
+
1
m
F
i
(q
j
, v
j
, t).
(h, i, j = 1, 2, 3)
106 Capitolo 4. Meccanica newtoniana
nelle sei funzioni incognite q
i
(t) e v
i
(t).
Come per ogni sistema dinamico lo studio del sistema (4.8) o del sistema (4.9) pu` o essere
facilitato dalla conoscenza di integrali primi. Un integrale primo `e in questo caso una
grandezza (scalare o vettoriale), funzione di (r, v) (oppure di (r, v, t) nel caso non auto-
nomo), che si mantiene costante lungo ogni moto. Per questo motivo gli integrali primi
della meccanica prendono anche il nome di costanti di moto. Integrali primi tipici sono
associati alle tre grandezze cinetiche fondamentali considerate nel paragrafo seguente.
4.2 Grandezze cinetiche fondamentali
Chiamiamo atto di moto di un punto la coppia (r, v) costituita dal vettore posizione
rispetto ad un punto sso O e dal vettore velocit` a. Ad ogni atto di moto vengono associate
le tre grandezze cinetiche fondamentali:
(i) Quantit` a di moto
(4.11) p = mv
(ii) Momento della quantit` a di moto o momento angolare rispetto al polo O
(4.12) K
O
= OP p = mr v
(iii) Energia cinetica
(4.13) T =
1
2
mv
2
(v
2
= v v)
Derivando rispetto al tempo queste tre grandezze e tenuto conto dellequazione fondamen-
tale della dinamica, si trovano le equazioni
(4.14)
_
_
dp
dt
= F
dK
O
dt
= M
O
dT
dt
= W
dove
(4.15) M
O
= r F
`e il momento della forza F rispetto al polo (sso) O, e
(4.16) W = F v
4.2. Grandezze cinetiche fondamentali 107
`e la potenza della forza F. Le tre equazioni (4.14) prendono rispettivamente il nome
di teorema della quantit` a di moto, teorema del momento angolare, teorema
dellenergia.
Da questi teoremi seguono semplici ma importanti corollari, detti teoremi di conserva-
zione, i quali, subordinatamente a certe ipotesi sulle leggi di forza, mostrano lesistenza
di integrali primi tipici della meccanica del punto.
1 Integrale primo della quantit` a di moto: se F = 0 allora p = costante (ovvero
v = costante). Segue dalla (4.14)
1
. In questo caso ogni moto `e rettilineo e uniforme. Pi` u
in generale: se esiste una direzione ssa, rappresentata da un versore sso u, a cui la forza
F `e sempre ortogonale, F u = 0, allora la componente della quantit` a di moto, ovvero
della velocit` a, secondo questa direzione `e un integrale primo: v u = costante.
2 Integrale primo del momento angolare: se esiste un punto sso O rispetto al
quale il momento della forza `e nullo, cio`e se la forza F(r, v, t) `e sempre diretta verso O,
ovvero se F r = 0, allora il momento angolare K
O
`e un integrale primo: rv = costante.
Segue dalla (4.14)
2
.
Si osservi che lintegrale primo del momento della quantit` a di moto, a meno del fattore m,
coincide con la velocit` a areale vettoriale. A questa conclusione si giunge anche osservando
che se la forza `e sempre parallela a OP, allora anche laccelerazione del punto `e sempre
parallela a OP; quindi tutti i moti conseguenti allazione di tale forza sono moti centrali.
3 Integrale primo del momento assiale. Se a `e una retta, u un suo versore, O un
suo punto, la quantit` a
(4.17) M
a
= M
O
u = r F u
(posto r = OP) prende il nome di momento assiale della forza F e non dipende dalla
scelta del punto O sulla retta. Esso si annulla se e solo se i tre vettori (r, u, F) sono
dipendenti. Ci` o signica che la retta di applicazione del vettore applicato (P, F) interseca
la retta a. Segue allora dalla (4.14)
2
moltiplicata scalarmente per u che se la forza F `e
sempre diretta verso una retta ssa a di versore u allora la funzione rv u `e un integrale
primo.
Si osservi che la quantit` a rv u coincide con la velocit` a areale della proiezione del punto
su di un piano ortogonale alla retta a (rispetto al centro dato dallintersezione di a con
tale piano).
4 Integrale primo dellenergia. Se la forza F `e posizionale e conservativa, se esiste
cio`e un campo scalare U tale che
F = grad(U),
allora la funzione
(4.18) E = T U
`e un integrale primo. Infatti da F = grad(U) segue
W = F v =
dU
dt
108 Capitolo 4. Meccanica newtoniana
perche, facendo intervenire coordinate cartesiane ortonormali (si veda la Nota ?? pi` u
avanti),
grad(U) v =
U
x
=
U
x
dx
dt
=
dU
dt
.
Quindi dal teorema dellenergia (4.14)
3
segue
d
dt
_
T U
_
= 0. Vedremo pi` u avanti (Cap. 5)
una possibile estensione dellintegrale dellenergia nel caso di una forza dipendente anche
dalla velocit` a e dal tempo.
Ricordiamo che la funzione U prende il nome di potenziale. Alla funzione V = U si d` a
invece il nome di energia potenziale, cosicche la funzione E = T +V , somma dellenergia
cinetica e dellenergia potenziale, prende il nome di energia totale.
Nota 4.2.1 Consideriamo una prima semplice ma interessante applicazione dellinte-
grale dellenergia. Sia h la costante dellenergia, cio`e il valore assunto dallenergia totale
E per un pressato moto del punto. Si osservi che
h = T
0
U
0
dove T
0
ed U
0
sono i valori iniziali dellenergia cinetica e del potenziale. Poiche `e sempre
T 0 dalla condizione T U = h segue che le possibili posizioni del punto debbono
soddisfare alla disuguaglianza
(4.19) h + U(r) 0.
Luguaglianza nella (4.19) denisce una supercie, detta supercie limite, regolare nei
punti in cui il gradiente di U, cio`e la forza, non `e nulla. In genere questa supercie
divide lo spazio in due regioni. Il moto avviene in una delle due regioni, quella denita
dalla disuguaglianza (4.19), e la supercie limite costituisce una barriera invalicabile. Se
raggiunta dal punto essa non pu` o essere superata. Su di essa il punto ha velocit` a nulla
(perche T = 0). Si noti bene che tale supercie limite dipende dalla costante dellenergia
quindi dalle condizioni iniziali.
4.3 Lo spazio-tempo di Newton
Il modello di spazio ane tridimensionale euclideo assunto per lo spazio sico `e subor-
dinato alla scelta di un riferimento. Noi concepiamo lidea di pi` u riferimenti ma quando
osserviamo e descriviamo movimenti di oggetti presupponiamo la scelta di un ben denito
riferimento. A stretto rigore gli spazi ani associati a due riferimenti diversi (in moto uno
rispetto allaltro) sono diversi: il mondo osservato da un riferimento `e diverso dal mondo
osservato da un altro riferimento. `e di conseguenza del tutto naturale concepire lidea che
anche il tempo cambi da riferimento a riferimento, cio`e che ad ogni riferimento non solo
sia associato uno spazio ane ma anche un tempo.
La meccanica newtoniana postula per` o lesistenza di un tempo unico per tutti i riferimenti
(il tempo assoluto). Non postula invece lesistenza di un riferimento privilegiato quindi
di uno spazio assoluto tridimensionale (ripropostosi in sica pi` u tardi sotto forma di etere e
4.3. Lo spazio-tempo di Newton 109
poi denitivamente abbandonato) bens` lesistenza di una classe di riferimenti privilegiati,
i riferimenti inerziali o galileiani.
Inoltre, col principio di relativit` a galileiana, postula che le leggi della meccanica siano
invarianti in forma rispetto ad ogni sistema inerziale. Questo principio, esteso da Einstein
a tutti i fenomeni sici riferiti a sistemi inerziali (principio di relativit` a speciale) e suc-
cessivamente anche ai non inerziali (principio di relativit` a generale), pu` o riformularsi
come principio dellassoluto, nel senso seguente: tutte le leggi siche (in particola-
re quelle della meccanica) possono esprimersi in forma assoluta, cio`e indipendente dalla
scelta del riferimento.
Siamo cos` condotti a ricercare un ambiente opportuno dove formulare tali leggi. A questo
scopo osserviamo che un concetto primitivo assoluto elementare per la meccanica (come
lo `e per la geometria euclidea quello di punto) `e il concetto di evento. Un evento (quale
ad esempio lo scoppio di una stella, laccendersi di una lampadina, lurto di due particelle,
ecc.) ha un suo carattere assoluto, che si pu` o per` o tradurre in termini relativi quando
lo si voglia collocare nello spazio (con la scelta di un riferimento) e nel tempo (con la
scelta di un calendario o di un orologio). Si possono allora descrivere in maniera assoluta
le leggi delluniverso operando sullinsieme di tutti gli eventi, chiamato spazio-tempo o
universo o cron` otopo, ed enunciando il principio dellassoluto nella maniera seguente:
Principio I. Tutte le leggi siche si esprimono in forma assoluta, cio`e indipendente dalla
scelta del riferimento, nello spazio-tempo.
Per rendere eettivo questo principio occorre istituire sullo spazio-tempo una struttura
matematica atta a rappresentare le suddette leggi. Questa struttura pu` o essere dedotta a
partire da postulati di natura sico-matematica oppure postulata direttamente. Seguiremo
il secondo approccio.
Vi sono vari modelli matematici per lo spazio-tempo. Essi si distinguono sostanzialmente
in due classi: spazi-tempi ani e spazi-tempi non ani. La struttura ane dello
spazio-tempo `e concomitante al postulato dellesistenza dei riferimenti inerziali: i moti
inerziali, connessi con tali riferimenti, sono rappresentati da rette nello spazio-tempo.
Gli spazi-tempi ani fondamentali sono lo spazio-tempo di Newton, sede della mec-
canica newtoniana, e lo spazio-tempo di Minkowski, sede della meccanica einsteinia-
na (o teoria della Relativit` a Ristretta). Questo paragrafo `e dedicato allo studio dello
spazio-tempo di Newton. La sua struttura `e denita nel seguente enunciato.
Principio II. Lo spazio-tempo di Newton `e uno spazio ane a 4 dimensioni (N, E, ).
Per ogni coppia di eventi P, Q N il vettore PQ = (P, Q) E prende il nome di
intervallo assoluto dei due eventi. Lo spazio vettoriale associato E `e dotato di un
covettore E
( oo = tempo). Per ogni coppia di eventi P, Q N il numero
reale PQ, ) prende il nome di intervallo temporale assoluto dei due eventi. Se
PQ, ) > 0 si dice che levento Q segue P o che P precede Q. Se PQ, ) = 0 si dice
110 Capitolo 4. Meccanica newtoniana
che gli eventi sono contemporanei. Lo spazio
(4.20) E
0
= v E [ v, ) = 0
dei vettori di E che annullano `e dotato di un tensore metrico g
0
denito positivo per
cui la coppia (E
0
, g
0
) `e uno spazio vettoriale euclideo tridimensionale. Ogni vettore di E
0
`e detto spaziale. A due eventi distinti contemporanei P e Q (quindi tali che PQ E
0
) si
associa il numero positivo [PQ[ =
_
g
0
(PQ, PQ) =
PQ PQ detto intervallo spaziale
assoluto dei due eventi.
Si osservi che in questo modello di spazio-tempo `e denita la distanza spaziale assoluta
solo fra eventi contemporanei. La distanza spaziale di eventi non contemporanei `e un
concetto relativo (si veda pi` u avanti). Una prima conseguenza delle precedenti assunzioni
`e il seguente
Teorema 4.3.1 Esiste una funzione reale (denita a meno di una costante additiva)
t: N R, detta tempo assoluto, tale che
(4.21) = dt
e
(4.22) PQ, ) = t(Q) t(P)
per ogni coppia di eventi P, Q N. Per ogni numero reale s linsieme
N
s
= P N [ t(P) = s = t
1
(s)
degli eventi occorrenti alla data s `e un sottospazio ane tridimensionale euclideo con
spazio vettoriale soggiacente (E
0
, g
0
).
Dimostrazione. Si consideri su N un sistema di coordinate ani (x
). Al covettore
E
corrisponde su N la forma dierenziale
=
dx
,
le cui componenti (
) sono costanti. Questa 1-forma `e esatta, perche se si pone
t =
,
si vede che dt =
dx
= . Inoltre:
t(Q) t(P) =
(x
(Q) x
(P)) = PQ, ),
e la (4.22) `e dimostrata. Se inoltre P `e un evento di N
s
, allora ogni altro evento Q
contemporaneo `e tale che t(Q) t(P) = 0, quindi tale che PQ, ) = 0, vale a dire
PQ E
0
. Lo spazio N
s
`e quindi il sottospazio ane generato da un qualunque suo punto
4.3. Lo spazio-tempo di Newton 111
_
`
........................................................................................................................................................................................................................................................................................................................................................ ...................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ....................................................................................................................................................................................................................................................................................................................................................... ...................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ....................................................................................................................................................................................................................................................................................................................................................... ...................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ....................................................................................................................................................................................................................................................................................................................................................... ...................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ....................................................................................................................................................................................................................................................................................................................................................... ...................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
t
tempo assoluto
................................................................................................................................................................................... ... ... .. .. .. . ..
................
P
t(P)
......................................................................................................................................................................................................................................... .... .. .. .. .. . ..
................
Q
t(Q)
N(ewton)
................................................................................................................................................ ... ... .. .. .. . . .
................
R
.........................................................
.........................................................
.........................................................
.........................................................
Figura 4.1: Spazio-tempo di Newton N. Intervallo temporale tra
due eventi P e Q.
P e da tutti i vettori di E
0
. Lo spazio vettoriale corrispondente si identica banalmente
con E
0
. 2
I sottospazi N
s
, che possiamo chiamare spazi di contemporaneit` a, formano un fogliet-
tamento dello spazio-tempo e stabiliscono una cronologia assoluta degli eventi. Si dice
inoltre che lapplicazione t: N R costituisce la brazione temporale assoluta dello
spazio-tempo di Newton: le bre sono i sottospazi N
s
.
Il moto di una particella `e interpretabile come una successione continua di eventi, quindi
come curva nello spazio-tempo.
Definizione 4.3.1 Il moto di un punto (o storia di una particella) `e una curva
nello spazio-tempo di Newton : I N : () (di classe C
1
almeno).
Il parametro della storia prende il nome di tempo proprio della particella: pu` o
pensarsi come il tempo misurato da un orologio posseduto dalla particella. Vista lesistenza
in N di un tempo assoluto, `e ragionevole assumere come principio che i tempi propri delle
particelle siano sincronizzati col tempo assoluto:
Principio III. Lungo una storia () il tempo proprio coincide con il tempo assoluto
(modulo una costante):
(4.23) t () = + cost.
Di conseguenza:
Teorema 4.3.2 Il vettore tangente V = ad una storia , detto velocit` a assoluta,
112 Capitolo 4. Meccanica newtoniana
_
`
............................................................................................................................................................................................................................................................................................................................................................................................................................ ................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ........................................................................................................................................................................................................................................................................................................................................................................................................................... ................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ........................................................................................................................................................................................................................................................................................................................................................................................................................... ................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ........................................................................................................................................................................................................................................................................................................................................................................................................................... ................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ........................................................................................................................................................................................................................................................................................................................................................................................................................... ................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
t
N
............................................................................................................................................................................ ... ... .. .. .. .. .. . .. .
.....................
R
.....................................................................
.....................................................................
.....................................................................
.....................................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.................................................................................................... . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .................
................
1
V ()
P()
R()
A()
Figura 4.2: Soria di una particella.
soddisfa alla condizione
(4.24) V , ) = 1
detta condizione di normalizzazione. La velocit` a assoluta `e trasversa (cio`e non tan-
gente) agli spazi di contemporaneit` a N
s
.
Dimostrazione. La condizione (4.23) equivale a
(4.25) D(t )() =
dt
d
= 1
e questa a sua volta, ricordata la denizione di vettore tangente, a
(4.26) V , dt) = 1,
cio`e alla (4.24). Per dimostrare la trasversalit` a basta ricordare che la condizione di
tangenza `e V , dt) = 0, perche N
s
`e denito dallequazione t = s = cost. 2
Nota 4.3.1 Essendo N uno spazio ane, ssato un suo qualunque punto O, la storia
di una particella ammette una rappresentazione vettoriale del tipo
(4.27) OP = R(),
denotato con P() il punto mobile. La velocit` a assoluta pu` o dunque denirsi come limite
di un rapporto incrementale:
(4.28) V () = lim
h0
1
h
_
R( +h) R()
_
.
4.3. Lo spazio-tempo di Newton 113
_
`
............................................................................................................................................................................................................................................................................................................................................................................................................................ ................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ........................................................................................................................................................................................................................................................................................................................................................................................................................... ................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ........................................................................................................................................................................................................................................................................................................................................................................................................................... ................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ........................................................................................................................................................................................................................................................................................................................................................................................................................... ................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ........................................................................................................................................................................................................................................................................................................................................................................................................................... ................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
t
N
............................................................................................................................................................................ ... ... .. .. .. .. .. . .. .
.....................
R
.....................................................................
.....................................................................
.....................................................................
.....................................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.................................................................................................... . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......................
.....................
1
V ()
P()
R()
..........................................................................................................................................................................................................................................................................................................................................................................................................
.....................................................................................................
Figura 4.3: Moto inerziale di una particella.
Definizione 4.3.2 Laccelerazione assoluta di una particella `e il vettore
(4.29) A =
dV
d
denito, per ogni valore del tempo proprio , da
(4.30) A() = lim
h0
1
h
_
V ( + h) V ()
_
.
Si dice che una particella si muove di moto inerziale o che `e in stato inerziale se la
sua velocit` a assoluta `e costante, ovvero se A = 0.
Nota 4.3.2 Al contrario della velocit` a assoluta, laccelerazione assoluta `e sempre tan-
gente ai sottospazi N
s
. Infatti
A, dt) =
dV
d
, ) =
d
d
V , ) = 0,
perche `e costante e V , ) = 1.
Un moto inerziale `e rappresentato da una retta nello spazio-tempo, trasversale al fogliet-
tamento degli spazi di contemporaneit` a. Il moto inerziale rappresenta il moto di un punto
materiale libero e isolato, non soggetto cio`e ad alcuna sollecitazione. I moti inerziali sono
i soli ad essere rappresentati da rette nello spazio-tempo e quindi sono alla base della sua
114 Capitolo 4. Meccanica newtoniana
struttura ane. `e dunque ragionevole formulare per la dinamica di un punto materiale
libero il seguente principio:
Principio IV. Un punto o particella materiale `e una coppia (P, m) costituita da un
punto mobile P() nello spazio-tempo di Newton N e da un numero reale positivo m,
detto massa propria o massa inerziale. Le sollecitazioni a cui esso `e soggetto e che lo
deviano dallo stato inerziale sono rappresentate da un vettore F E. Tutte le possibili
storie di un punto materiale soddisfano allequazione
(4.31) mA = F
Come si vede, la formulazione di questo principio fa intervenire soltanto concetti assoluti,
cio`e deniti sullo spazio-tempo. Introduciamo ora il concetto di riferimento ed analizzia-
mone le conseguenze. Per riferimento sico sintende un insieme di punti distribuiti con
continuit` a nello spazio sico, ciascuno caratterizzato da un nome, costituito in genere da
tre coordinate. Le particelle di un riferimento vengono anche chiamate osservatori. Nello
spazio-tempo le storie di questi osservatori sono rappresentate da curve non intersecantisi
che lo ricoprono completamente (si dice anche che esse formano una congruenza di curve
nello spazio-tempo) oppure solo in parte, nel caso che il riferimento sico considerato non
invada tutto lo spazio. Le velocit` a assolute degli osservatori, cio`e i vettori tangenti alle
loro storie, formano un campo vettoriale soddisfacente, per denizione, alla condizione di
normalizzazione (4.24). Le accelerazioni assolute sono inne nulle se e solo se gli osserva-
tori si muovono tutti di moto inerziale e costituiscono quindi un riferimento inerziale. Di
qui la seguente
Definizione 4.3.3 Un riferimento `e un campo vettoriale X sullo spazio-tempo N
soddisfacente in ogni punto alla condizione di normalizzazione
(4.32) X, ) = 1
Se il campo X `e costante il riferimento si dice inerziale o galileiano. Le curve integrali
del campo X rappresentano le storie delle particelle del riferimento.
Qui ci limitiamo a considerare solo riferimenti inerziali. Le storie degli osservatori di un
riferimento inerziale formano, nello spazio-tempo, un fascio di rette parallele.
Teorema 4.3.3 Sia X un riferimento inerziale. Linsieme N
X
degli osservatori (cio`e
delle storie delle sue particelle) `e uno spazio ane euclideo tridimensionale.
Dimostrazione. Nello spazio vettoriale E soggiacente allo spazio ane N si consideri la
relazione di equivalenza generata da X,
u v u v = k X (k R).
4.3. Lo spazio-tempo di Newton 115
_
`
Figura 4.4: Un riferimento inerziale nello spazio-tempo.
ed il corrispondente spazio vettoriale quoziente E
X
= E/X. Si denoti con [v]
X
la classe
di equivalenza rappresentata dal vettore v E. Si consideri inoltre lapplicazione
X
: N
X
N
X
E
X
denita da
X
(o
1
, o
2
) = [P
1
P
2
]
X
, P
1
o
1
, P
2
o
2
.
Si verica facilmente che questa denizione `e ben data, cio`e che il primo membro non
dipende dalla scelta degli eventi P
1
e P
2
lungo le storie dei due osservatori o
1
e o
2
, e che
inoltre lapplicazione
X
soddisfa ai requisiti richiesti dalla denizione di spazio ane. Si
ha dunque che la terna
(N
X
, E
X
,
X
)
`e uno spazio ane. Inoltre sullo spazio vettoriale E
X
si pu` o denire un tensore metrico
ponendo
[
X
(o
1
, o
2
)[ = [P
1
P
2
[, P
1
o
1
, P
2
o
2
[ P
1
P
2
, ) = 0.
Ci` o signica che la distanza di due osservatori `e uguale allintervallo spaziale assoluto di
due qualunque eventi contemporanei appartenenti alle loro rispettive storie. Lo spazio
ane diventa allora euclideo. 2
Lo spazio ane N
X
rappresenta lo spazio sico osservato dal riferimento inerziale X. Sia
X
: N N
X
lapplicazione suriettiva che associa ad ogni evento P N losservatore la
116 Capitolo 4. Meccanica newtoniana
cui storia contiene P. Il teorema precedente mostra che con la scelta di un riferimento lo
spazio-tempo si decompone, tramite lapplicazione biunivoca
X
t: N N
X
R: P
_
X
(P), t(P)
_
,
nel prodotto cartesiano dello spazio N
X
e dellasse reale dei tempi Figura 4.4.
Lo spazio vettoriale E
X
`e canonicamente isomorfo allo spazio E
0
perche ogni classe [v]
X
E
X
ammette uno ed un solo rappresentante v E
0
. Infatti, ssato un riferimento X,
ogni vettore nello spazio-tempo pu` o essere rappresentato, in maniera unica, come somma
di un vettore parallelo a X e di un vettore spaziale, cio`e appartenente a E
0
. Applichiamo
questa rappresentazione agli enti vettoriali assoluti n qui introdotti.
Definizione 4.3.4 Diciamo rappresentazione o decomposizione relativa al rife-
rimento X dellintervallo assoluto PQ di due eventi la scrittura
(4.33) PQ = r + X, r, ) = 0
Il vettore spaziale r prende il nome di intervallo spaziale relativo dei due eventi.
Si noti che, applicando alluguaglianza (4.33) il covettore e tenendo conto della (4.22),
si ottiene
(4.34) t(P) t(Q) = .
Il numero che compare nella (4.33) `e dunque lintervallo temporale assoluto dei due
eventi.
Definizione 4.3.5 Sia : I N la storia di una particella. Diciamo moto relativo al
riferimento inerziale X della particella la curva
X
: I N
X
proiezione della mediante
la
X
:
X
=
X
.
Diciamo rappresentazione o decomposizione relativa al riferimento X della velo-
cit` a assoluta della particella la scrittura
(4.35) V = v +X, v, ) = 0
Il vettore spaziale v prende il nome di velocit` a relativa a X della particella.
Questa denizione richiede alcuni commenti. Si consideri una rappresentazione vettoriale
OP = R() della storia riferita ad un punto O N. Per ogni valore del tempo proprio
si pu` o considerare la decomposizione relativa a X del vettore R():
(4.36) R() = r() +() X, r(), ) = 0.
Il vettore r() fornisce la rappresentazione vettoriale relativa al riferimento X del moto
della particella. Tenuto conto di quanto osservato in precedenza, lungo la storia della
4.3. Lo spazio-tempo di Newton 117
particella il tempo proprio si pu` o identicare con il tempo assoluto t. Supposto che
levento O sia tale che t(O) = 0 la (4.36) diventa allora
(4.37) R(t) = r(t) +t X, r(t), ) = 0.
Derivando questuguaglianza rispetto a t = , a primo membro si trova la velocit` a assoluta
V e a secondo membro proprio lespressione (4.35), posto che si abbia
(4.38) v =
dr
dt
.
Quindi il vettore v che compare nella decomposizione (4.35) rappresenta proprio la velocit` a
relativa al riferimento X della particella Figura 4.5.
_
`
Figura 4.5: Storia di una particella osservata da un riferimento.
Si consideri ora la presenza di due riferimenti inerziali X e X
. Abbiamo, secondo quanto
nora visto, due rappresentazioni tridimensionali dello spazio sico, N
X
e N
X
. Questi
due spazi ani sono del tutto distinti. Il collegamento tra questi due spazi avviene solo
tramite lo spazio tempo N e le proiezioni
X
e
X
Figura 4.6.
I vettori X e X
rappresentano le velocit` a assolute delle particelle dei due riferimenti sici
corrispondenti. Si pu` o per esempio considerare la rappresentazione della velocit` a assoluta
X
relativa al riferimento X:
(4.39) X
= v
tr
+ X
Il vettore spaziale (costante) v
tr
cos` determinato prende il nome di velocit` a di trascina-
mento del riferimento X
rispetto al riferimento X: `e infatti, secondo quanto aermato
qui sopra, la velocit` a relativa a X delle particelle costituenti il riferimento X
.
118 Capitolo 4. Meccanica newtoniana
Considerata allora la storia di una particella , la sua velocit` a assoluta V ammette due
rappresentazioni relative ai due riferimenti:
V = v + X = v
+ X
.
Di qui, essendo per la (4.39)
v
tr
= X
X
segue subito luguaglianza
v = v
+v
tr
che esprime il teorema dei moti relativi Figura 4.6.
_
`
Figura 4.6: Il teorema dei moti relativi nello spazio-tempo.
Si pu` o inne considerare la rappresentazione relativa ad un generico riferimento inerziale
X dellaccelerazione assoluta:
A = a + X, a, ) = 0.
Derivando la (4.35) si vede che essa si riduce semplicemente a
A = a =
dv
dt
,
conformemente allosservazione gi` a fatta che essa `e un vettore spaziale. Dunque laccelera-
zione assoluta coincide con laccelerazione relativa ad un qualunque riferimento inerziale.
Lequazione dinamica assoluta (4.31) risulta quindi equivalente allequazione relativa
ma = F.
Si noti che anche la forza, come laccelerazione assoluta, `e sempre un vettore spaziale.
4.4. Lequazione di Weierstrass 119
4.4 Lequazione di Weierstrass
Lequazione dierenziale del secondo ordine su R del tipo
(4.40) x = f(x),
equivalente al sistema del primo ordine
(4.41)
_
x = v,
v = f(x),
si presenta di frequente nello studio dei fenomeni di moto. Per la ricerca e lanalisi delle
sue soluzioni x(t), che interpretiamo al solito come moti di un punto sulla retta reale, `e
conveniente tradurre lequazione (4.40) in unequazione dierenziale del primo ordine del
tipo
(4.42) x
2
= (x)
dove (x) `e una primitiva di 2f(x),
(x) = 2 f(x).
Chiamiamo equazione di Weierstrass
2
unequazione del tipo (4.42) e funzione di
Weierstrass la corrispondente funzione .
Per riconoscerlo osserviamo innanzitutto che, supposta f(x) di classe C
k
con k 1 in un
aperto D R, comunque si ssino le condizioni iniziali (x
0
, v
0
) con x
0
D, esiste ununica
soluzione (massimale) x(t) tale che x(0) = x
0
e x(0) = v
0
. Ebbene, questa `e anche una
soluzione della (4.42) purche la primitiva (x) sia quella soddisfacente alla condizione
(4.43) v
2
0
= (x
0
).
Essendo infatti
d
dt
_
x
2
(x)
_
= 2 x x
(x) x = 2 x
_
x f(x)
_
,
si vede che per ogni soluzione della (4.40) questa derivata `e nulla; dunque la funzione
x
2
(x) `e costante lungo le soluzioni dellequazione dierenziale (4.40) (`e un integrale
primo). Pertanto se vale inizialmente la (4.43) si ha sempre x
2
(x) = 0, il che signica
che la soluzione della (4.40) considerata `e anche soluzione della (4.42). Viceversa, dalle
uguaglianze ora scritte si vede che una soluzione della (4.42) `e anche soluzione della (4.40)
escludendo quegli istanti in cui x(t) = 0 (istanti di arresto). Osserviamo daltra parte
dallequazione (4.42) che i moti del punto corrispondenti ad una pressata primitiva (x)
devono necessariamente avvenire in intervalli dellasse x in cui (x) 0, intervalli che sono
delimitati dagli zeri della (x). Ma la stessa equazione (4.42) mostra che questi zeri sono
posizioni di arresto del punto, cio`e posizioni in cui il punto ha necessariamente velocit` a
2
Karl Weierstrass, 1815 - 1897.
120 Capitolo 4. Meccanica newtoniana
nulla. Da tutto questo si comprende che nello studio del comportamento delle soluzioni
dellequazione (4.40) giocano un ruolo essenziale gli zeri della funzione di Weierstrass .
Vediamo come.
Fissate le condizioni iniziali (x
0
, v
0
), sia (x) la funzione di Weierstrass determinata dalla
(4.43). Consideriamo i due casi: (I) v
0
= 0 e (II) v
0
,= 0.
Caso (I). La (4.43) mostra che x
0
`e uno zero di : (x
0
) = 0. Distinguiamo due sottocasi:
(Ia) x
0
`e uno zero semplice di e quindi f(x
0
) ,= 0,
(Ib) x
0
`e uno zero multiplo e quindi f(x
0
) = 0.
3
Sottocaso (Ia). Il punto non pu` o rimanere in x
0
, perche la funzione costante x(t) = x
0
non pu` o essere soluzione della (4.40), essendo il primo membro identicamente nullo e il
secondo non nullo (perche f(x
0
) ,= 0). Il punto quindi abbandona la posizione x
0
nella
direzione in cui (x) > 0.
Sottocaso (Ib). La funzione costante x(t) = x
0
`e questa volta soluzione della (4.40) ed
`e unica. Dunque il punto permane indenitamente nella posizione iniziale x
0
. Uno zero
multiplo della (x) `e pertanto una posizione di equilibrio.
Caso (II). Per la (4.43) si ha (x
0
) > 0. In questo caso x(t) `e monot` ona crescente o
decrescente, per un intorno t > 0, a seconda che sia v
0
> 0 oppure v
0
< 0. Il punto si
muover` a verso un primo zero x
1
della (x) (dove si arresta) o verso un estremo x
1
del suo
campo di denizione, eventualmente + o . Se x
1
`e uno zero multiplo allora esso `e
una meta asintotica per il moto x(t) nel senso che
x(t) ,= x
1
, t > 0,
lim
t+
x(t) = x
1
.
In altre parole si ha un moto asintotico: il punto si avvicina indenitamente alla posi-
zione x
1
senza mai raggiungerla. Si pu` o dimostrarlo per assurdo. Se raggiungesse x
1
ad
un certo istante t
1
, qui avrebbe velocit` a nulla e vi resterebbe per sempre perche x
1
`e uno
zero multiplo: caso (Ib).
Osserviamo daltra parte che se x(t) `e una soluzione della (4.42) lo `e anche la funzione
x(t). Ma se x(t) `e il moto ora considerato, quello a ritroso `e assurdo perche il punto
uscirebbe da uno zero multiplo, cosa vietata per quanto visto nel caso (Ib).
Se x
1
`e uno zero semplice allora esso viene raggiunto in un tempo nito t
1
dato dallinte-
grale
(4.44) t
1
=
_
x
1
x
0
dx
_
(x)
col segno + se x
1
> x
0
(cio`e se v
0
> 0: x(t) monot` ona crescente) o il segno nel caso
3
Diciamo che x
0
`e uno zero semplice di una funzione (x) se in x
0
si annulla la funzione ma non la sua
derivata prima: (x
0
) = 0,
(x
0
) ,= 0. `e uno zero multiplo se invece si annulla anche la derivata prima:
(x
0
) =
(x
0
) = 0.
4.4. Lequazione di Weierstrass 121
opposto. Infatti dallequazione (4.42) segue la duplice equazione
dt =
dx
_
(x)
la cui integrazione, osservato che lintegrando ha segno costante, fornisce una funzione
monot` ona
(4.45) t(x) =
_
x
x
0
du
_
(u)
,
funzione inversa della soluzione x(t) considerata. Si noti che lintegrale (4.44) `e improprio,
perche lintegrando non `e limitato per x x
1
. Tuttavia `e un integrale nito perche
lintegrando `e un innito di ordine < 1 in quel punto, essendo questo uno zero semplice di
.
4
.
Si osservi ancora che per t > t
1
il punto abbandona la posizione x
1
, per quanto visto nel
caso (Ia), per ritornare a ripercorrere in senso contrario lintorno di x
1
in cui `e positiva.
Uno zero semplice si comporta quindi da punto di riessione.
Se inne nella direzione in cui si muove inizialmente il punto non vi sono zeri di (x), questo
raggiunge un estremo x
1
del campo di denizione di oppure vi tende asintoticamente a
seconda che lanalogo integrale (4.44) sia nito oppure no. Il caso (II) `e cos` completato.
Possiamo allora riassumere tutta la discussione nel quadro seguente:
x
1
zero della (x)
con cond. iniziali(x
0
, v
0
)
_
_
zero semplice
zero multiplo, x
1
,= x
0
zero multiplo, x
1
= x
0
riessione
meta asintotica
equilibrio
4
Data una funzione F(x) continua in un intervallo [x
0
, x
1
) ma non limitata in x
1
, si pone
Z
x
1
x
0
F(x) dx = lim
xx
1
Z
x
x
0
F(u)du.
DallAnalisi sappiamo che una condizione suciente perche questo limite sia nito `e che la F(x) abbia un
innito di ordine r < 1. Si dice che F ha un innito di ordine r > 0 se esiste una costante positiva A tale
che nellintorno sinistro di x
1
vale la disuguaglianza
[F(x)[ A
1
(x
1
x)
r
.
Nel caso presente `e F(x) =
`
(x)
1
2
. Siccome (x) ha uno zero semplice in x
1
, la funzione integranda
F(x) ha un innito di ordine r =
1
2
. Infatti uno zero semplice `e di ordine 1, perche per il teorema di
Lagrange, posto che (x
1
) = 0, si ha per ogni x prossimo a x
1
(x) =
() (x x
1
)
con x < < x
1
. Siccome
(x) `e continua nellintorno sinistro di x
1
e inoltre
(x
1
) ,= 0, vale senzaltro
una limitazione del tipo [
(x)[ A con A > 0. Dunque dalla formula precedente segue che a sinistra di
x
1
vale la limitazione
[(x)[ A(x
1
x),
la quale mostra appunto che (x) ha uno zero di ordine 1. Di conseguenza la radice
p
(x) ha uno zero
di ordine
1
2
e quindi linversa un innito di ordine
1
2
. Di qui la nitezza dellintegrale (4.45).
122 Capitolo 4. Meccanica newtoniana
Si consideri per esempio il caso in cui la posizione iniziale x
0
`e allinterno di un intervallo
I
0
= [x
1
, x
2
] delimitato da due zeri semplici successivi della funzione Figura 4.7 (a).
Nellintervallo aperto (x
1
, x
2
) la `e necessariamente positiva. Supposto v
0
> 0, il punto
si muover` a per valori crescenti di x no a raggiungere in un tempo nito lo zero x
2
dove
si arrester` a, per proseguire il moto in direzione opposta, cio`e per valori decrescenti di x,
no a raggiungere in un tempo nito lestremo sinistro x
1
dellintervallo. Qui avr` a un
nuovo istante di arresto, invertir` a il moto no a ritrovarsi in x
0
con la stessa velocit` a
iniziale v
0
, e tutto si ripeter` a allinnito. Pertanto il punto si muove sempre nellintervallo
[x
1
, x
2
] toccandone alternativamente gli estremi. Il moto `e periodico e il periodo `e dato
dallintegrale
(4.46) T = 2
_
x
2
x
1
dx
_
(x)
.
Infatti il tempo impiegato a percorrere lintervallo in un verso o in quello opposto `e lo stesso
ed `e dato dallintegrale (4.45) esteso a tale intervallo. Si consideri, altro esempio, il caso
di uno zero multiplo x
1
illustrato dalla Figura 4.7 (b). Se il punto si muove inizialmente
verso lo zero x
1
, continuer` a a muoversi in quella direzione senza per` o mai raggiungere x
1
.
`
E inne importante notare che (x) `e una primitiva di 2f(x) dipendente dalle condizioni
iniziali (x
0
, v
0
). Quindi al variare di queste, la (x) varia per una costante additiva. In
altre parole il suo graco subisce delle traslazioni verticali (cio`e lungo lasse y) al variare
delle condizioni iniziali. Ci` o consente, nota la (x) per una coppia di condizioni iniziali,
di avere unidea globale di tutte le possibili distribuzioni degli zeri e quindi di tutti i tipi
di moti, per tutte le condizioni iniziali.
4.5 Dinamica del punto vincolato
Un punto materiale, anziche essere libero di occupare qualunque posizione nello spazio e
di assumere qualunque velocit` a, pu` o essere soggetto a vincoli di posizione o a vincoli
di velocit` a. Un vincolo di posizione pu` o essere rappresentato da una supercie (ssa o
mobile) oppure da una curva (ssa o mobile): al vettore posizione r = OP `e imposto di
soddisfare unequazione del tipo
(4.47) (r, t) = 0,
rappresentante la supercie al tempo t, oppure una coppia di equazioni
(4.48)
1
(r, t) = 0,
2
(r, t) = 0,
rappresentanti la curva al tempo t. Ogni moto compatibile con il vincolo deve es-
sere rappresentato da una funzione OP = r(t) soddisfacente identicamente la (4.47) o le
(4.48). Anche la (4.47) rappresenti una supercie regolare si richiede che la funzione
abbia, per ogni istante t e per i punti soddisfacenti alla (4.47), gradiente non nullo. Ana-
logamente, anche le (4.48) rappresentino una curva regolare si richiede che le funzioni
4.5. Dinamica del punto vincolato 123
_
..................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
.............................................................................................................................................................................................................................................................................................. ................
.. .... .. . .. . . . . . .
..................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
......................................................................................................................................................................................................................................... . .... .. . .. . . . . . .
.................
................................................... . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
x
x
y
t
x
1
x
0
x
2
v
0
(x)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
(a)
..................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
.............................................................................................................................................................................................................................................................................................. ................
.... ... . .. . . .. . . .
..................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
......................................................................................................................................................................................................................................... ... ... . .. . . .. . . .
.................
.................................................................. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
x
x
y
t
x
0
v
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
(b)
Figura 4.7: (a) Due zeri semplici: moto periodico. (b) Uno zero doppio:
moto asintotico.
1
e
2
abbiano, per ogni t e per i punti soddisfacenti alle (4.48), gradienti linearmente
indipendenti.
Un vincolo di posizione rappresentato da unuguaglianza del tipo (4.47) (supercie) `e un
vincolo bilaterale. Si possono considerare anche vincoli unilaterali, rappresentati da
disuguaglianze del tipo (r, t) 0 (per esempio il caso del pendolo: il punto rappresenta-
tivo `e vincolato a non occupare posizioni esterne ad una sfera di raggio pari alla lunghezza
del lo, inestendibile ma essibile, del pendolo).
Un vincolo di posizione implica sempre un vincolo di velocit` a, ma non viceversa. Per
esempio per un punto vincolato ad una supercie di equazione (4.47) le velocit` a devono
soddisfare alla condizione
(4.49) grad() v +
t
= 0,
che `e la scrittura sintetica dellequazione
dx
dt
+
t
= 0
ottenuta derivando totalmente rispetto al tempo la rappresentazione in coordinate carte-
siane (x
) dellequazione (4.47). Si ha conferma dalla (4.49) che se il vincolo `e sso (il
124 Capitolo 4. Meccanica newtoniana
tempo t non compare esplicitamente nella funzione ) allora la velocit` a `e sempre tangente
al vincolo. Si osservi che il vincolo di velocit` a (4.49) `e lineare (non omogeneo) nella v.
Dal punto di vista dinamico, conformemente al principio newtoniano secondo cui ogni
azione che tende a rimuovere un punto dal suo stato naturale di moto rettilineo uniforme
`e una forza rappresentata da un vettore, si postula che il soddisfacimento del vincolo sia da
attribuirsi alla presenza di un vettore-forza, detto forza reattiva o reazione vincolare.
In base a questo postulato, detto postulato delle reazioni vincolari, lequazione della
dinamica di un punto soggetto ad un vincolo diventa
(4.50) ma = F
a
+F
r
dove il vettore F
a
, detto forza attiva, rappresenta la somma di tutte le forze di natura
non vincolare che agiscono sul punto.
Mentre della forza attiva F
a
si postula una ben determinata dipendenza dalla posizione
e velocit` a del punto (cio`e una legge di forza, eventualmente dipendente dal tempo), la
reazione vincolare `e a priori unincognita. Si sa soltanto, in base al postulato, che essa
deve operare in modo tale da rendere sempre soddisfatto il vincolo. Alla reazione vincolare
`e tuttavia imposta una condizione costitutiva che traduce in termini matematici le
caratteristiche siche del vincolo, cio`e il tipo di forza reattiva che il vincolo `e capace di
esplicare.
La condizione costitutiva pi` u semplice `e quella di vincolo liscio, rappresentata dallorto-
gonalit` a della reazione vincolare F
r
al vincolo (curva o supercie). Si osservi che questa
condizione traduce matematicamente il concetto intuitivo di assenza di attrito, ovvero di
non dissipazione di potenza da parte del vincolo (almeno nel caso in cui questo `e sso).
Infatti se la potenza reattiva W
r
= F
r
v `e sempre nulla qualunque sia la velocit` a del
punto, siccome questa `e sempre tangente al vincolo (se questo `e sso), segue che F
r
`e
ortogonale.
Esaminiamo in questo paragrafo la dinamica di un punto vincolato ad un vincolo liscio e
sso. Per la discussione del caso di un vincolo mobile `e conveniente porsi nel contesto pi` u
generale della meccanica lagrangiana (Cap. 5).
La dinamica di un punto vincolato ad un supercie liscia ssa, per quanto sopra
visto, `e retta dal sistema di equazioni
(4.51)
_
_
_
(r) = 0,
ma = F
a
(r, v, t) + grad()
composto dallequazione della supercie (4.47), dallequazione fondamentale (4.50) e dalla
condizione costitutiva di vincolo liscio, che per il teorema del gradiente si pu` o esprimere
con luguaglianza
(4.52) F
r
= grad()
dove `e un coeciente di proporzionalit` a. Si tratta di un sistema dierenziale del secondo
ordine nellincognita r(t) contenente unincognita ausiliaria (t), detta moltiplicatore di
4.5. Dinamica del punto vincolato 125
Lagrange.
5
La discussione di questo sistema (riportata in appendice al paragrafo) porta
alla conclusione seguente: comunque si ssino la posizione e la velocit` a iniziali del punto,
compatibili con il vincolo, esiste ununica soluzione (r(t), (t)) del sistema (4.51).
Un metodo alternativo alle equazioni (4.51) consiste nel decomporre lequazione fondamen-
tale (4.50) nella sua parte tangente e nella sua parte ortogonale alla supercie. Ricordiamo
a questo proposito 2.7, formula (2.76) che laccelerazione `e decomponibile nella somma
a = a
(i)
+ a
(N)
dove a
(i)
`e la parte tangente (laccelerazione intrinseca) e a
(N)
`e la parte ortogonale.
Questultima risulta essere data da
a
(N)
= B(v, v) N,
dove B `e la seconda forma fondamentale ed N `e un versore ortogonale alla supercie. La
condizione di vincolo liscio si esprime semplicemente nelluguaglianza
F
r
= RN.
Decomposta anche la forza attiva nella somma
(4.53) F
a
= F + F
N
N (F N = 0)
della sua parte tangente F e della sua parte ortogonale alla supercie F
N
N, lequazione
(4.50) risulta allora decomposta nelle due equazioni
(4.54)
_
_
_
ma
(i)
= F(r, v, t),
mB(v, v) = F
N
(r, v, t) + R.
`
E importante osservare che la prima di queste equazioni non coinvolge la reazione vincolare
e permette da sola la determinazione dei moti. La seconda invece, una volta che sia
determinato il moto, consente di calcolare la funzione R(t) e quindi la reazione vincolare.
Se si considerano coordinate (q
i
) sulla supercie (i = 1, 2), ricordate le espressioni delle
componenti dellaccelerazione intrinseca e posto
(4.55) F = F
i
e
i
,
si vede che la prima delle equazioni (4.54) risulta equivalente al seguente sistema del primo
ordine:
(4.56)
_
_
dq
i
dt
= v
i
dv
i
dt
=
i
hj
v
h
v
j
+
1
m
F
i
(q
j
, v
j
, ),
d
dt
= 1,
(h, i, j = 1, 2)
5
Joseph-Louis Lagrange, 1736-1813.
126 Capitolo 4. Meccanica newtoniana
ovvero, se le forze attive non dipendono dal tempo, al sistema
(4.57)
_
_
dq
i
dt
= v
i
dv
i
dt
=
i
hj
v
h
v
j
+
1
m
F
i
(q
j
, v
j
).
(h, i, j = 1, 2)
Nota 4.5.1 Il sistema (4.57) corrisponde ad un campo vettoriale X
L
sopra lo spazio TQ
dei vettori tangenti alla supercie Q rappresentante il vincolo, di coordinate (q
i
, v
i
). Come
vedremo, TQ `e una variet` a dierenziabile di dimensione 4. Per il teorema di Cauchy esiste
una ed una sola curva integrale massimale basata in un pressato punto iniziale di TQ, vale
a dire posizione e velocit` a iniziali del punto. Questa curva sar` a localmente rappresentata
da quattro equazioni parametriche, q
i
= q
i
(t), v
i
= v
i
(t), soluzioni del sistema (4.57). Le
prime due, q
i
= q
i
(t), forniscono il moto del punto.
Nota 4.5.2 Se la forza attiva F
a
`e nulla si dice che il punto si muove di moto spon-
taneo sulla supercie: `e soggetto alla sola reazione del vincolo. In tal caso lequazione
(4.54)
1
fornisce a
(i)
= 0. I moti spontanei su di una supercie sono quindi moti geodetici
2.8.2.
Nota 4.5.3 Nel caso di un punto vincolato ad una supercie lenergia cinetica `e data
da
(4.58) T =
1
2
mA
ij
v
i
v
j
,
dove le A
ij
, funzioni delle coordinate q
i
, sono le componenti della prima forma fondamen-
tale. Infatti: v v = v
i
v
j
e
i
e
j
= v
i
v
j
A
ij
. Le equazioni di moto di un punto vincolato
ad una supercie liscia possono anche costruirsi, con un procedimento diretto, partendo
dalla conoscenza dellenergia cinetica e delle cosiddette forze lagrangiane:
(4.59)
i
= F
a
e
i
= F e
i
.
Infatti, per quanto si `e visto sulle componenti covarianti dellaccelerazione di un punto
libero e sullaccelerazione intrinseca di un punto su di una supercie, lequazione (4.54)
1
risulta equivalente alle due equazioni
(4.60)
d
dt
_
T
v
i
_
T
q
i
=
i
(i = 1, 2)
posto v
i
=
dq
i
dt
= q
i
. Queste sono le equazioni di Lagrange, la cui validit` a si estende
ad una vasta classe di sistemi meccanici (Cap. 5).
Nota 4.5.4 Le considerazioni svolte al 4.2 sugli integrali primi tipici associati alle
grandezze cinetiche fondamentali possono estendersi al caso di un punto vincolato ad una
supercie. Omettendo la discussione dettagliata, consideriamo solo tre esempi.
(I) Se il vincolo e la forza attiva sono tali che la somma F
a
+ F
r
`e un vettore sempre
diretto verso una retta ssa sussiste lintegrale primo del momento assiale.
4.5. Dinamica del punto vincolato 127
(II) Se la supercie `e liscia e ssa e la forza attiva `e conservativa sussiste lintegrale primo
dellenergia.
(III) In questultimo caso la restrizione del potenziale U alla supercie si rappresenta con
una funzione U(q
i
) delle coordinate della supercie. Le forze lagrangiane risultano allora
date da
(4.61)
i
=
U
q
i
Per riconoscerlo basta calcolare la potenza della forza attiva W
a
= F
a
v. Da un lato si
ha
W
a
= F
a
v
i
E
i
=
i
v
i
.
Dallaltro
W
a
=
dU
dt
=
U
q
i
dq
i
dt
=
U
q
i
v
i
.
Nota 4.5.5 La dinamica di un punto vincolato ad una curva liscia ssa pu` o essere
trattata proiettando lequazione fondamentale (4.50) sul triedro fondamentale della curva
(t, n, b). Poiche laccelerazione `e suscettibile della decomposizione intrinseca
a = s t +c s
2
n,
posto
F
a
= F
at
t +F
an
n +F
ab
b, F
r
= F
rn
n +F
rb
b
si noti che la condizione di vincolo liscio si esprime nellannullarsi della componen-
te tangente alla curva della reazione vincolare lequazione fondamentale (4.50) risulta
decomposta nel sistema di equazioni
(4.62)
_
_
m s = F
at
(s, s, t),
mc s
2
= F
an
(s, s, t) + F
rn
,
0 = F
ab
(s, s, t) +F
rb
.
dette equazioni intrinseche del moto. La prima non coinvolge la reazione vincolare
e quindi consente di determinare completamente il moto. Essa infatti `e unequazione
dierenziale del secondo ordine nella funzione incognita s(t). Noto il moto, la seconda
consente di calcolare la reazione normale F
rn
e la terza la reazione binormale F
rb
, sicche
tutti gli elementi incogniti risultano completamente determinati.
Nota 4.5.6 Le argomentazioni della Nota 4.5.4 si possono ripetere per il punto vincolato
ad una curva. In questo caso per` o si pu` o aermare che nel caso di una forza attiva
posizionale, qualunque essa sia, sussiste sempre lintegrale primo dellenergia. Infatti la
prima equazione intrinseca diventa
m s = F
at
(s)
128 Capitolo 4. Meccanica newtoniana
e se si considera una qualunque primitiva U(s) della funzione F
at
(s) risulta:
W
a
= F
a
v = F
at
s =
dU
ds
s =
dU
dt
.
Sicche dal teorema dellenergia
W
a
+W
r
=
dT
dt
,
essendo W
r
= 0 per lipotesi del vincolo liscio, segue
d
dt
_
T U
_
= 0.
Nota 4.5.7 Nel caso di un punto su di una curva lenergia cinetica `e data da
T =
1
2
m s
2
.
Sussistendo lintegrale primo dellenergia, si ha dunque
(4.63)
1
2
m s
2
U(s) = h,
dove h `e la costante dellenergia. Posto allora
f(s) =
1
m
F
at
(s), (s) =
2
m
_
h + U(s)
_
,
lequazione di moto (4.62)
1
e lintegrale dellenergia (4.63) assumono rispettivamente la
forma:
(4.64) s = f(s), s
2
= (s).
Si osservi che (s) `e una primitiva di 2f(s). La seconda `e lequazione di Weierstrass e si
pu` o quindi applicare la discussione di 4.4.
***
Discussione del sistema di equazioni (4.51). Si consideri lo spazio TE
3
R
6
dei vettori
applicati dello spazio ane euclideo tridimensionale E
3
, cio`e delle coppie di vettori (r, v),
di coordinate (x
, v
). Sia Q E
3
la supercie di vincolo di equazione (x
) = 0. Sia
TQ TE linsieme dei vettori tangenti alla supercie Q. Un vettore `e tangente alla
supercie se e solo se `e applicato in un punto di questa ed inoltre `e ortogonale a grad().
Pertanto TQ `e il sottoinsieme di TE
3
R
6
denito dalle due equazioni
(4.65) (r) = 0, (r, v) v grad() = 0.
Poiche la matrice 2 6 delle derivate parziali
_
_
=
_
0
v
_
4.5. Dinamica del punto vincolato 129
ha rango massimo (le derivate /x
, componenti del gradiente, non si annullano mai
simultaneamente per lipotesi di regolarit` a della supercie Q) le equazioni (4.65) denisco-
no TQ come supercie regolare di codimensione 2 in R
6
. Introdotta la forma quadratica
associata allhessiano della funzione ,
(v) = v
,
si pu` o aermare che:
Teorema 4.5.1 I moti r(t) di un punto vincolato ad una supercie liscia ssa, cio`e le
soluzioni del sistema (4.51), sono la prima componente di tutte e sole le curve integrali
(r(t), v(t)) basate in punti di TQ del sistema dinamico X su TE
3
di equazioni
(4.66)
_
_
dr
dt
= v,
dv
dt
=
1
m
F
a
_
1
m
F
a
grad() + (v)
_
grad()
[grad()[
2
.
In corrispondenza a tali curve integrali il moltiplicatore di Lagrange (t) `e dato da
(4.67) =
m(v) + F
a
grad()
[grad()[
2
.
Dimostrazione. Si moltiplichi scalarmente la (4.51)
2
per grad() in modo da risolverla
rispetto a . Tenuto conto che per ogni moto compatibile col vincolo si ha v grad() = 0,
quindi che
(4.68) a grad() = v
d
dt
grad() = (v),
si trova la (4.67). Sostituendo la (4.67) nella stessa (4.51)
2
si vede che le soluzioni del
sistema (4.51) soddisfano al sistema (4.66). Viceversa, osservato che per ogni curva su
TE
3
si ha
(4.69) =
d
dt
,
d
dt
=
dv
dt
grad() + (v),
si consideri una curva integrale del sistema (4.66) basata in un punto di TQ. In virt` u
della (4.66)
2
si ha per la (4.69)
2
= 0, quindi = costante, anzi = 0 perche cos` `e
inizialmente. Dalla (4.69)
1
segue allora = costante, anzi = 0 perche cos` `e inizialmente.
Pertanto ogni curva integrale del sistema (4.66) basata in TQ giace tutta su TQ (vale a
dire: il campo vettoriale X `e tangente a TQ). Una tale curva, per il modo con cui si `e
costruita lequazione (4.66)
2
, `e soluzione del sistema (4.51). 2
Si noti come questo metodo (del moltiplicatore di Lagrange) appaia pi` u complesso rispetto
a quello della decomposizione ortogonale-tangente dellequazione della dinamica, se non
altro perche richiede lintegrazione di un sistema di sei equazioni dierenziali anziche di
quattro.
130 Capitolo 4. Meccanica newtoniana
4.6 Il moto dei gravi
Dalla Fisica sappiamo che la forza agente su di un punto materiale liberamente gravitante
in prossimit` a della supercie terrestre, per tempi brevi e per piccoli spazi, preso come
riferimento la Terra ma trascurate le forze apparenti (e la resistenza dellaria), `e rappre-
sentabile da un vettore costante proporzionale alla massa gravitazionale del punto (che
si identica con la sua massa inerziale) e verticale, cio`e ortogonale al piano orizzontale
rappresentante localmente la supercie terrestre, e orientato verso il basso. La legge di
forza `e cio`e F = mg, dove g `e un vettore costante, detto accelerazione gravitazionale.
Lequazione dierenziale del moto si riduce allora semplicemente a
(4.70) a = g (= cost.).
Con due integrazioni successive si ottengono i vettori velocit` a e posizione del punto in
funzione del tempo:
(4.71) v = g t + v
0
, r =
1
2
g t
2
+ v
0
t +r
0
,
essendo (r
0
, v
0
) posizione e velocit` a iniziali. Le (4.71) mostrano che il moto `e piano (il
piano del moto `e verticale e determinato dalla posizione iniziale P
0
e dalla velocit` a iniziale
v
0
) ed `e la composizione di un moto rettilineo uniforme di velocit` a v
0
e di un moto
verticale uniformemente accelerato. Essendo F u = 0 con u versore orizzontale qualsiasi,
sussiste lintegrale primo della quantit` a di moto secondo ogni direzione orizzontale: la parte
orizzontale della velocit` a resta costante. Siccome la forza `e conservativa, di potenziale
U = mgz
(si scelgano assi cartesiani (x, y, z) con asse z verticale orientato verso lalto) sussiste
lintegrale primo dellenergia (diviso per la massa)
1
2
( x
2
+ y
2
+ z
2
) +g z = cost.
Siccome la quantit` a di moto orizzontale `e costante, `e anche costante la parte per cos` dire
orizzontale dellenergia cinetica, sicche combinando i due integrali primi si ottiene un
terzo integrale primo:
1
2
z
2
+ g z = h, h =
1
2
z
2
0
+g z
0
,
che pu` o porsi nella forma di equazione di Weierstrass (4.4)
z
2
= (z), (z) = 2(h gz).
La funzione (z) ha come graco una retta Figura 4.8 e mette quindi in evidenza, qua-
lunque sia la costante h, uno zero semplice z
1
rappresentante la quota massima raggiunta
dal grave (se lanciato inizialmente verso lalto)
z
1
=
h
g
=
1
2
z
2
0
g
+z
0
.
La quota massima `e raggiunta in un tempo nito
t
1
=
_
z
1
z
0
dz
_
2(h gz)
=
z
0
g
.
4.7. Il pendolo 131
_
`
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......................
.....................
............................................................................................................................................................................................................................................................................................................................................................................................................................................ ....................
... ... ... .. .. .. . .. . ..
............ ....................
.... ... ... .. .. . .. . .. .
............ .... ... .. .. .. .. . .. . .
.....................
z
(z)
z
1
z
0
..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
Figura 4.8: La funzione di Weierstrass (z) della caduta
di un grave.
4.7 Il pendolo
Sintende comunemente per pendolo un corpo pesante collegato con un lo inestendibile
ad un punto sso O e per il resto libero di muoversi sotto linuenza della gravit` a. Si tratta
di un sistema meccanico schematizzabile in prima approssimazione in un punto materiale
(P, m) vincolato ad una sfera di centro O e raggio pari alla lunghezza del lo, supposto
che questo resti sempre teso, o meglio che esso sia in realt` a costituito da unasticciola
rigida di massa trascurabile. Se si trascurano gli attriti dovuti alle articolazioni tra corpo,
asta e punto sso, nonche allaria, il vincolo `e da ritenersi liscio: la forza reattiva F
r
`e
ortogonale alla sfera e rappresenta la forza che il lo esercita sul punto P (la sua intensit` a `e
la tensione del lo). Se il riferimento scelto `e quello terrestre, per moti di breve durata e a
bassa velocit` a si pu` o trascurare la forza di Coriolis, sicche la forza attiva si riduce alla sola
forza peso, la quale pu` o ritenersi costante perche le dimensioni del pendolo sono trascurabili
rispetto alla sfera terrestre. Il modello cos` costruito prende il nome di pendolo sferico.
Se invece si vuol tener conto della forza di Coriolis, si ottiene il classico pendolo di
Foucault.
Se la velocit` a v
0
del punto `e nulla oppure appartiene al piano verticale contenente P
0
e
O, allora il moto avviene in questo piano. Per dimostrarlo si pu` o osservare che sussiste
lintegrale primo del momento assiale della quantit` a di moto OP v k = cost., con k
versore verticale, perch`e il vettore forza a secondo membro della (4.47) `e sempre diretto
verso la retta verticale passante per O (oppure, quando F
r
= 0, parallela a questa).
Questa quantit` a rappresenta la velocit` a areale del punto P
, proiezione del punto P su di
un piano orizzontale (ortogonale a k). Se `e nulla allinizio, essa `e sempre nulla, quindi il
132 Capitolo 4. Meccanica newtoniana
_
`
............................................................................................................................................................................................................................................................................................................................................................................................................................................ . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
............................................................................................................................................................................................................................................................................................................................................................................................................................................ .... ... .. .. .. .. . .. . .
.....................
......... . . . . . . . . . . . . . . . . .. . .
. . . . . . . . . . . . . . . . . . . . .
mg
x
z
............................................................................................................................................................... ...... ..... .... ... ... ... ... .. ... .. .. .. .. .. .. .. .. . .. . .. .. . .. . . .. . . .. . . .. . . . .. . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . .. . . . . .. . . . .. . . .. . .. . .. . .. . .. . .. .. .. . .. .. .. .. ... .. ... .. ... ... .... .... .... ....... ......................................................................................................................................................................................................................................................................................................................................................................................................
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.......................................................................................................................................................................
Figura 4.9: Il pendolo piano.
moto avviene in un piano verticale.
Il caso particolare ora considerato giustica lo studio del pendolo piano,
6
costituito da
un punto pesante vincolato ad una circonferenza verticale (cio`e giacente su di un piano
parallelo al campo di forza costante mg).
Si considerino assi cartesiani (x, z) aventi origine in O, con z verticale orientato verso il
basso. Conviene anche considerare langolo compreso tra OP e lasse z Figura 4.9.
Il potenziale della forza peso `e U = mgz, quindi la sua restrizione alla circonferenza `e
U = mgl cos . Cominciamo col considerare lintegrale primo dellenergia T U = h, che
in questo caso diventa
1
2
m
2
2
mg cos = h.
Questo produce unequazione di Weierstrass:
2
= (), () = 2
_
h
m
2
+
g
cos
_
.
Posto
2
=
g
, k =
h
mg
,
risulta
() = 2
2
(k + cos ).
Si riconoscono di qui, con laiuto dei graci di Figura 4.10, i vari tipi di moto del pendolo
semplice gi` a considerati nellEsempio 1.14.5.
6
Nel seguito ometteremo lattributo piano.
4.7. Il pendolo 133
_
`
................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... ....................
... .... .. .. .. .. .. . .. .
()
0
0
2
2
2
2
2
k=1
k=0
k=1
k=2
I
II
II
IV
....................................................................................................................................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................................................................................................
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
Figura 4.10: La funzione di Weierstrass () del pendolo.
(I) Se k = 1, si ha uno zero doppio per = 0: `e uno stato di equilibrio. Lequilibrio `e
stabile perche per piccole variazioni di k (che per la sua stessa denizione non pu` o mai
essere < 1) questo zero doppio si modica in un intervallino compreso tra due zeri sem-
plici, quindi lo stato di equilibrio si modica in un moto periodico (piccole oscillazioni).
La nozione di posizione di equilibrio stabile, derivante da quella di punto critico stabile,
sar` a precisata al Cap. 5.
(II) Se 1 < k < 1, si hanno due zeri semplici
1
e
2
simmetrici rispetto a = 0: il
pendolo oscilla tra questi due estremi con moto periodico.
(III) Se k = 1, si ha uno zero doppio = , che corrisponde alla sommit` a del pendolo.
Questa pu` o essere una meta sintotica oppure una posizione di equilibrio se il pendolo vi
si trova inizialmente (lequilibrio per` o non `e stabile, perche piccole variazioni di k non
producono pi` u piccole oscillazioni).
(IV) Se k > 1, la funzione di Weierstrass `e sempre positiva, non vi sono zeri: il pendolo
non si arresta mai, ruotando sempre nello stesso verso con moto periodico.
Consideriamo ora le equazioni intrinseche del moto (4.62) nel caso del pendolo. Essendo
in questo caso s = , g t = g sin , g n = g cos , si ottengono le equazioni:
_
= g sin,
m
2
= mg cos + F
rn
,
0 = F
rb
.
134 Capitolo 4. Meccanica newtoniana
La prima `e lequazione del pendolo:
+
2
sin = 0,
2
=
g
.
Nel caso di piccole oscillazioni lapprossimazione sin produce lequazione del moto
armonico:
+
2
= 0.
La seconda equazione intrinseca consente di calcolare la reazione vincolare F
r
che `e tutta
diretta secondo il versone normale n. Se si tien conto anche dellintegrale primo dellenergia
si trova a conti fatti che
F
rn
= m
_
2
0
2 g cos
0
+ 3 g cos
_
.
Questa formula esprime quindi la tensione del lo, nota la sua posizione istantanea, la sua
posizione iniziale e la sua velocit` a iniziale. Le eventuali posizioni in cui F
rn
si annulla sono
possibili punti di distacco del punto dalla circonferenza.
4.8 Moto di un punto in un campo centrale simmetrico
Un campo di forza F(P) `e detto campo centrale se esiste un punto O, detto centro
del campo, tale che F(P) `e parallelo al vettore OP. Il campo F ammette in questo caso
una rappresentazione del tipo
F = F u,
dove u `e il versore di OP ed F `e un campo scalare (lintensit` a della forza). Pi` u in
particolare un campo centrale `e detto simmetrico o a simmetria sferica se la sua
intensit` a F `e funzione della sola distanza r dal centro O:
F = F(r) u.
Un tale campo `e conservativo: una qualunque primitiva U(r) di F(r) `e un potenziale.
Per la dinamica di un punto materiale mobile in un campo centrale simmetrico sussistono
quindi due integrali primi: lintegrale primo del momento della quantit` a di moto (o delle
aree, vedi 2.5) e lintegrale primo dellenergia. I moti sono centrali di centro O (perche
a r = 0), quindi piani. Il piano del moto `e individuato dal punto O e dai vettori
posizione e velocit` a iniziali (r
0
, v
0
). Se su questo piano si considerano coordinate polari
(r, ) di centro il punto O allora i due integrali primi si traducono nelle uguaglianze
(4.72)
_
_
_
r
2
= c,
1
2
m
_
r
2
+r
2
2
_
U(r) = h,
dove c `e la costante delle aree e h la costante dellenergia. Fissata la costante delle aree,
che supponiamo non nulla (quindi `e anche r ,= 0), dalla (4.72)
1
si ricava
(4.73)
=
c
r
2
,
4.8. Moto di un punto in un campo centrale simmetrico 135
e quindi dalla (4.72)
2
1
2
m r
2
U(r) +
1
2
m
c
2
r
2
= h.
Questequazione, che coinvolge solo la variabile r e la sua derivata prima, assume la forma
di equazione di Weierstrass
(4.74) r
2
= (r)
ponendo
(4.75) (r) =
2
m
_
U(r) + h
_
c
2
r
2
.
Daltra parte, ricordata lespressione dellaccelerazione in coordinate polari, lequazione
fondamentale della dinamica ma = F si riduce allequazione scalare
r r
2
=
1
m
F(r)
e quindi, ancora per la (4.73), allequazione
(4.76) r =
c
2
r
3
+
1
m
F(r).
Questa `e lequazione dierenziale del secondo ordine del tipo r = f(r), a cui `e associata
lequazione di Weierstrass (4.74) con (r) primitiva di 2f. Queste sono le equazioni del
moto radiale cio`e del moto del punto lungo la retta che lo congiunge al centro del campo.
Questa retta ruota con velocit` a angolare data dalla (4.74). Possiamo allora applicare
al moto radiale la discussione vista al 4.4. Consideriamo a titolo di esempio tre casi
signicativi.
(I) Ad uno zero multiplo r
1
di corrisponde unorbita circolare. Questa `e eettivamente
percorsa se inizialmente `e proprio r
0
= r
1
. In caso contrario `e unorbita limite perche r
1
`e una meta asintotica (se per esempio r
0
< r
1
e r
0
> 0, come in Figura 4.11).
(II) Se la funzione (r) ha un unico zero semplice r
1
ed `e positiva per r > r
1
, allora
lorbita `e illimitata, tangente alla circonferenza di raggio r
1
in un punto P
1
e simmetrica
rispetto alla retta OP
1
Figura 4.12.
(III) Se r
1
< r
2
sono due zeri semplici successivi, estremi di un intervallo in cui `e positiva,
allora lorbita del punto `e tutta interna alla corona circolare delimitata dalle circonferenze
di raggio r
1
e r
2
e tocca alternativamente tali circonferenze in punti detti rispettivamente
apocentri e pericentri, formanti due successioni, (a
1
, a
2
, . . .) e (p
1
, p
2
, . . .), le cui ano-
malie, misurate sempre nel medesimo verso, dieriscono per multipli interi di un angolo
Figura 4.13. Sebbene il moto radiale sia periodico, in genere non `e periodico il moto del
punto. Anche lo sia (e quindi lorbita sia chiusa) `e necessario e suciente che la succes-
sione degli apocentri (o dei pericentri) sia ciclica, cio`e langolo
sia commensurabile con
. Se cos` non `e la successione segli apocentri `e densa sulla circonferenza di raggio r
2
e di
conseguenza, come si pu` o dimostrare, lorbita `e densa nella corona circolare; in questo caso
136 Capitolo 4. Meccanica newtoniana
_
`
.................................................................................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
............................................................................................................................................................................................................................................ ....................
.... ... .. .. .. .. .. . .. .
............................................ . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
r
1
r
0
r
(r)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . .. . . . .. . . .. . . .. . .. . .. . .. . .. .. . .. .. .. .. .. .. .. ... .. ... ... ... ... .... ..... ...... ........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ ............. ..... ..... .... ... ... ... ... .. ... .. .. .. .. .. .. . .. .. .. . .. . .. . .. . .. . . .. . . .. . . . . .. . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
r
0
r
1
. . . . . . . . . . . . . . . ......................
.....................
. . . . . . . . . . . . ......................
.....................
............
.......
Figura 4.11: Orbita limite circolare.
si dice che il moto `e quasi-periodico: comunque si ssi un punto della corona circolare,
un suo qualunque intorno ha intersezione non vuota con lorbita.
A questo proposito `e naturale chiedersi per quali potenziali langolo
`e sempre com-
mensurabile con e quindi le orbite al nito sono sempre chiuse. La risposta `e data dal
seguente classico teorema di Bertrand,
7
di non immediata dimostrazione.
Teorema 4.8.1 In un campo centrale simmetrico le orbite al nito sono sempre chiuse
se e solo se il potenziale U(r) `e del tipo
U = kr
2
oppure del tipo
U =
k
r
con k > 0.
Si tratta rispettivamente del potenziale di una forza elastica di origine in O (oscillatore
armonico piano) e del potenziale di un campo newtoniano. Per questi potenziali le orbite
al nito sono ellittiche (per il secondo, sono tutte al nito).
Ritornando al caso generale, va osservato che dalla (4.74) si trae lequazione dierenziale
(4.77) dt =
dr
_
(r)
il cui segno va scelto concorde a r
0
e la cui integrazione determina la funzione
(4.78) t(r) =
_
r
r
0
dx
_
(x)
.
7
Joseph Louis Francois Bertrand, 1822-1900.
4.9. Moto di un punto in un campo newtoniano 137
_
`
.................................................................................................................................................................................................................................................................................................................................. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
....................................................................................................................................................................................................................................................................................... ....................
.... ... .. .. .. .. .. . .. .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......................
.....................
r
1
r
0
r
(r)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . .. . . .. . . .. .. . .. .. .. .. ... .. .... .... .............................................................................................................................................................................................................................................................................................. ..... ... ... ... .. .. .. .. . .. .. . .. . . .. . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
r
0
r
1
. . . . . . . . . . . . ......................
.....................
.............. .. .. . .. . .. . . .. . . . . . .
.. ...................
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
...
Figura 4.12: Orbita illimitata.
Questa `e invertibile nella funzione r(t) che fornisce il moto radiale. Dalla (4.73) e dalla
(4.77) (con per esempio il segno +) si ricava lequazione dierenziale
(4.79) d =
c
r
2
dr
_
(r)
la cui integrazione fornisce, assegnata lanomalia iniziale
0
, una funzione (r), invertibile
in una funzione r = r() rappresentatrice dellorbita (in coordinate polari). Ritornando
al caso (III) si osserva in particolare che langolo
compreso tra un pericentro e un
apocentro successivi `e dato dallintegrale della (4.79) tra i limiti r
1
ed r
2
, zeri semplici
della (r):
(4.80)
= c
_
r
2
r
1
1
r
2
dr
_
(r)
.
Le orbite possono anche determinarsi attraverso la seconda formula di Binet (2.61) che
permette di tradurre lequazione fondamentale della dinamica ma = F nellequazione
dierenziale del secondo ordine
(4.81)
d
2
d
2
1
r
+
1
r
+
r
2
mc
2
F(r) = 0
nella funzione r().
4.9 Moto di un punto in un campo newtoniano
Particolarizziamo lo studio precedente al caso di un campo newtoniano, cio`e al caso in cui
(4.82) F(r) =
k
r
2
, U(r) =
k
r
, k > 0.
138 Capitolo 4. Meccanica newtoniana
_
`
............................................................................................................................................................................................................................................................................................................................................................................ . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
....................................................................................................................................................................................................................... ...............
.. ... ... .. .. . .. .
................................................ . . . . . . . . . . . . . . . . . . . . .
r
1
r
0
r r
2
(r)
r
0
r
1
r
2
.................... . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . .. . . . . . .. . . . .. . . .. . . .. . . .. . .. . .. . .. . .. . .. .. .. . .. .. .. .. .. .. ... .. .. ... ... ... ... ... .... .... ..... ...... .......... ........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ ........ ...... .... .... .... ... ... ... .. ... .. .. ... .. .. .. .. .. . .. .. .. . .. .. . .. . .. . .. . . .. . . .. . . .. . . . .. . . . . .. . . . . . . .. . . . . . . . . . . . . .
..................................................................................................................................................................................................... .... ... ... .. .. . .. .. . . .. . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . .. . . .. . .. .. .. .. ... ... ...... ... ...............................................................................................................................................................................................................
............................................................................................................................
a
1
................. .............
.... .. .. .. .
. . . . . .. . . . . . . . . . . . ............
...........
..................
...
...
...
...
...
...
...
...
...........
a
2
p
1
. . . . . . . . . . . . . . . . . . ............ ...........
.................... . . . . . . . . . .
. . . .. . .. . ..
. . . . . . . . . . .
a
3
p
2
. . .. . . . . . . . . .. . . . . ............
...........
.................... . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .
a
4
p
3
.................... . . . . . . . . . . . . . . . . . . . .
. . . . .. . . . .. . . .. .. .. ..
.... .... ... .... ..... ....................
....... ..... .... .. ...
...........
a
5
p
4
.................... . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . . . . . . . . . ............ ...........
...........
a
6
p
5
.. . .. . .. . .. . .. . .. . ............
...........
Figura 4.13: Orbita limitata.
La funzione (r) diventa
(4.83) (r) =
2
m
_
h +
k
r
_
c
2
r
2
.
Oltre alle due costanti strutturali del sistema dinamico, la massa m del punto e la costante
k (che, come sappiamo, `e proporzionale alla massa), compaiono in questa funzione le due
costanti di moto c e h.
`
E importante osservare che la costante dellenergia h, a meno del
fattore
2
m
, compare additivamente nella funzione (r). Fissata la costante delle aree c,
consideriamo cinque casi.
(I) Conviene considerare dapprima il caso h = 0 Il graco della funzione (r) ha come
asintoto orizzontale lasse r, uno zero semplice in
(4.84) r
z
=
mc
2
2k
e assume il valore massimo
(4.85) M = (r
) =
k
2
m
2
c
2
nel punto (Figura 4.14)
(4.86) r
=
mc
2
k
= 2 r
z
.
In questo caso lorbita `e illimitata e tocca la circonferenza di raggio r
1
(`e, come si vedr` a,
una parabola).
4.9. Moto di un punto in un campo newtoniano 139
_
`
............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
...........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
..... .. ... .. .. .. . .. . .
r
(r)
O
M
r
2
r
r
1
r
z
h = h
h =< 0
h = 0
h > 0
......
......
......
......
......
......
......
......
......
......
......
......
......
......
......
...... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.. . . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . ..................................................................................................................................................................
Figura 4.14: La funzione di Weierstrass del campo newtoniano.
(II) Qualunque sia h > 0 la funzione (r) ha sempre un solo zero semplice r
1
< r
z
.
Anche in questo caso lorbita `e illimitata e tocca la circonferenza di raggio r
1
(`e, come si
vedr` a, un ramo di iperbole).
(III) Se h = h
con
(4.87) h
=
k
2
2mc
2
,
allora la funzione (r) ha uno zero doppio in r
ed `e ovunque negativa. Lorbita `e circolare
di raggio r
.
(IV) Se 0 > h > h
si hanno due zeri semplici r
1
ed r
2
tali che r
z
< r
1
< r
< r
2
. Lorbita
`e allora contenuta nella corona circolare compresa dalle dirconferenze di raggio r
1
ed r
2
(si tratta di una ellisse).
(V) Se h < h
la funzione (r) `e sempre negativa. Si tratta quindi di un caso impossibile.
Va osservato che la costante dellenergia `e determinata dalle condizioni iniziali:
(4.88) h = T
0
U
0
=
1
2
mv
2
0
k
r
0
.
Posto
(4.89) v
2
f
=
2k
mr
0
,
140 Capitolo 4. Meccanica newtoniana
risulta
(4.90) h =
1
2
m
_
v
2
0
v
2
f
_
.
La quantit` a v
f
prende il nome di velocit` a di fuga. Se v
0
v
f
si ha h 0 e lorbita `e
illimitata (casi I e II).
Le orbite si ottengono integrando o lequazione (4.89) o lequazione (4.81) del paragrafo
precedente. La prima diventa
(4.91) d =
c dr
r
2
2
m
_
h +
k
r
_
c
2
r
2
,
e la seconda
(4.92)
d
2
d
2
1
r
+
1
r
=
k
c
2
.
Questultima `e unequazione del secondo ordine a coecienti costanti nellincognita
1
r
che
fornisce immediatamente la soluzione
(4.93)
1
r
=
1
p
_
1 +e cos(
0
)
_
con
(4.94) p =
mc
2
k
ed e costante arbitraria. La orbite sono dunque delle coniche di parametro p ed eccentricit` a
e. `e per` o necessario stabilire la relazione tra la costante dintegrazione e e le costanti di
moto (h, c). Per far questo si deve per` o ritornare allequazione dierenziale (4.91), che `e
dedotta proprio dagli integrali primi delle aree e dellenergia. Se si pone
x =
_
c
r
_
(, R)
risulta
dx =
c
r
2
dr, 1 x
2
=
2
_
1
2
2
+
2c
r
c
2
r
2
_
,
per cui se
c =
k
m
,
2
2
=
2h
m
,
lequazione (4.91) diventa
d =
dx
1 x
2
.
Un integrale `e = arccos x da cui segue x = cos e quindi
1
r
=
1
c
_
+
1
cos
_
.
4.9. Moto di un punto in un campo newtoniano 141
Questa soluzione assume la forma (4.93) (con
0
= 0) posto
p =
c
=
mc
2
k
, e =
p
c
=
1
=
1
2
+
2h
m
=
_
1 +
2mhc
2
k
2
.
Si trova cos`, oltre che una conferma della (4.94), lespressione delleccentricit` a in funzione
delle costanti di moto. Si osservi che
(4.95) p = r
, e =
_
1
h
h
.
I quattro casi possibili sopra considerati corrispondono allora alle situazioni seguenti:
(I)
(II)
(III)
(IV)
h = 0,
h > 0,
h = h
,
0 > h > h
,
e = 1,
e > 1,
e = 0,
0 < e < 1,
orbita parabolica,
orbita iperbolica,
orbita circolare,
orbita ellittica.
Esempio 4.9.1 Si dimostri che nel moto di un punto in un campo centrale simmetrico
il vettore
(4.96) L = v (r v) (r) u
_
u =
r
r
_
`e un integrale primo se e solo se
= costante, F(r) =
m
r
2
,
cio`e se e solo se il campo `e newtoniano o coulombiano:
F =
k
r
2
, =
k
m
, k R.
Lintegrale primo vettoriale L `e chiamato vettore di Laplace.
8
Utilizzando questinte-
grale primo `e immediato dimostrare che le orbite sono delle coniche. Infatti, osservato che
se L `e un integrale primo anche il suo modulo L `e una costante del moto, si ha da un lato
L r = Lr cos ,
con angolo compreso tra i due vettori, mentre dalla (4.96) risulta
L r = c
2
r,
con c costante delle aree. Uguagliando i due risultati si trova lequazione r(Lcos +) = c
2
che pu` o porsi nella forma (4.93) con
p =
c
2
, e =
L
.
8
Pierre Simon de Laplace, 1749-1827.
142 Capitolo 4. Meccanica newtoniana
4.10 Dinamica dei sistemi niti di punti
Il modello matematico newtoniano per i sistemi meccanici schematizzabili in un insieme
nito di punti materiali M = (P
, m
); = 1, . . . , N si fonda sui seguenti postulati.
(I) Le sollecitazioni a cui ogni punto P
`e soggetto sono rappresentate dalla somma di
due vettori: un vettore F
i
, detto forza interna, risultante di tutte le forze agenti su
P
dovute alla presenza di tutti gli altri punti del sistema, e un vettore F
e
, detto forza
esterna, risultante di tutte le forze agenti su P
dovute ad azioni esterne al sistema.
(II) Postulato delle forze interne: per ogni punto P
la forza interna F
i
`e data dalla
somma
(4.97) F
i
=
dove F
`e la forza che il punto P
esercita sul punto P
. Per questi vettori valgono le
condizioni
(4.98)
_
_
_
F
= 0
F
= F
costituenti il cosiddetto principio di azione e reazione (la (4.98)
1
signica che F
`e
parallelo alla congiungente P
).
(III) Per ogni punto del sistema vale lequazione dinamica
(4.99) ma
= F
i
+ F
e
.
Una conseguenza immediata del postulato delle forze interne `e il seguente teorema delle
forze interne.
Teorema 4.10.1 Le forze interne formano un sistema equivalente a zero, cio`e tale che:
(4.100) R
i
F
i
= 0, M
Oi
OP
F
i
= 0.
Infatti il sistema dei vettori applicati (P
, F
i
) `e equivalente ad un sistema di coppie a
braccio nullo. Per le nozioni essenziali concernenti i sistemi di vettori applicati si veda il
paragrafo seguente 4.11.
Un sistema di punti materiali si dice isolato se F
e
= 0 per ogni punto P
. Quindi per
un sistema isolato anche il sistema delle forze esterne `e equivalente a zero.
Esempio 4.10.1 Il problema ristretto dei due corpi. Consideriamo due punti ma-
teriali (S, M) e (T, m), liberi e isolati, cio`e non soggetti a vincoli e ad alcuna forza esterna.
Il moto delluno `e inuenzato dalla sola presenza dellaltro attraverso una reciproca sol-
lecitazione che, per il principio di azione e reazione, `e costituita da due forze opposte, di
4.10. Dinamica dei sistemi niti di punti 143
uguale intensit` a, dirette secondo la congiungente i due punti. Supponiamo che tali forze
dipendano solo dalla distanza r = [ST[ dei due punti. Sia allora (r)u la forza che S eser-
cita su T, con u versore di ST. Siano a
S
e a
T
le accelerazioni relative ad un riferimento
inerziale R. Le equazioni del moto (4.99) scritte in questo riferimento diventano:
(4.101) M a
S
= (r) u, ma
T
= (r) u.
Queste danno origine ad un sistema di sei equazioni dierenziali scalari del secondo ordine,
con incognite le sei coordinate dei punti in funzione del tempo. Il cosiddetto problema
ristretto dei due corpi consiste nello studio del moto del punto T rispetto al riferimento
R
univocamente denito dalle seguenti due condizioni: (i) il punto S `e sso in R
, (ii) R
`e in moto traslatorio rispetto ad un qualunque riferimento inerziale (in altri termini, R
`e
il riferimento rappresentanto da una terna di assi aventi origine in S e orientamento inva-
riabile rispetto alle stelle sse). Lequazione del moto di T relativa a questo riferimento
deve pertanto tener conto delle forze apparenti:
(4.102) ma = (r) u+ F
tr
+F
c
.
In questequazione a `e laccelerazione di T rispetto a R
e (r)u `e la forza reale agente su
T. Poiche R
si muove di moto traslatorio rispetto ad R, con accelerazione pari a quella
del punto solidale S, si ha
F
tr
= ma
S
, F
c
= 0.
Dalla (4.101) e dalla (4.102) segue allora lequazione
ma =
_
1 +
m
M
_
(r) u.
Posto
(4.103) m
=
mM
m+M
,
questultima diventa
(4.104) m
a = (r) u.
Lequazione (4.104) mostra che il punto T si muove in R
come un punto di massa m
soggetto alla forza centrale simmetrica (r) di centro sso S. Il numero m
prende il nome
di massa ridotta. Si noti infatti che m
< m.
Definizione 4.10.1 Fissato un riferimento, si dice atto di moto del sistema di punti
P
; = 1, . . . , N un qualunque sistema di vettori (r
, v
); = 1, . . . , N dove ogni
vettore r
rappresenta la posizione del punto P
rispetto ad un pressato punto O (quindi
r
= OP
) ed ogni vettore v
rappresenta la velocit` a del punto P
.
Ad ogni atto di moto di un sistema di punti materiali vengono associate alcune grandezze
cinetiche aventi carattere globale o di media, analoghe a quelle gi` a denite nel caso di un
solo punto. Esse sono: la quantit` a di moto
(4.105) p =
144 Capitolo 4. Meccanica newtoniana
il momento della quantit` a di moto rispetto ad un generico polo O (o momento
angolare)
(4.106) K
O
=
e lenergia cinetica
(4.107) T =
1
2
v
2
Per la quantit` a di moto e per lenergia cinetica valgono due notevoli propriet` a coinvolgenti
il baricentro G del sistema che, ricordiamo, `e denito da una delle due equazioni seguenti:
9
(4.108)
GP
= 0, OG =
1
m
_
m =
_
.
La prima propriet` a, semplice ma importante per le sue implicazioni, `e espressa dalla
formula
(4.109) p = mv
G
dove v
G
`e la velocit` a del baricentro. Essa aerma che
Teorema 4.10.2 La quantit` a di moto dellintero sistema `e pari alla quantit` a di moto
del baricentro pensato dotato della massa totale del sistema.
Dimostrazione. Ad un generico atto di moto del sistema corrisponde un atto di moto
del baricentro, vale a dire una velocit` a v
G
, ottenibile derivando formalmente rispetto al
tempo una delle equazioni (4.108), per esempio la prima. Si ottiene
(v
v
G
) = 0,
da cui segue la (4.109). 2
La seconda propriet` a, nota come teorema di K onig,
10
`e assai utile nel calcolo eettivo
dellenergia cinetica:
Teorema 4.10.3 Lenergia cinetica di un sistema `e uguale alla somma dellenergia
cinetica del suo baricentro, pensato dotato di tutta la massa del sistema, e dellenergia
cinetica nel moto rispetto al baricentro.
9
Per gli elementi essenziali della teoria dei baricentri si veda il 4.12.
10
Samuel Konig, 1712-1757.
4.10. Dinamica dei sistemi niti di punti 145
Per moto rispetto al baricentro sintende il moto rispetto al riferimento R
in moto
traslatorio rispetto al riferimento R e solidale col baricentro. Il teorema di K onig `e espresso
dunque dalla formula
(4.110) T =
1
2
mv
2
G
+T
dove T
`e lenergia cinetica nel moto rispetto al baricentro.
Dimostrazione. Denotiamo con v
la velocit` a del punto P
misurata nel riferimento R
.
Per il teorema dei moti relativi abbiamo v
= v
+v
G
, perche la velocit` a di trascinamento
del punto P
coincide, qualunque sia il punto P
, con la velocit` a del baricentro v
G
, posto
che il baricentro `e sso nel riferimento R
e che questultimo si muove di moto traslatorio
rispetto al riferimento R. Abbiamo allora successivamente:
v
2
_
v
+v
G
_
2
=
v
2
G
+ 2
v
G
.
Daltra parte lultimo termine `e nullo perche la somma
denisce la quantit` a di
moto p
del sistema rispetto a R
. Questa, per il Teor. 2, `e pari alla massa totale per la
velocit` a del baricentro rispetto allo stesso R
, che `e nulla perche il baricentro `e fermo in
R
. 2
Dopo aver introdotto le grandezze cinetiche fondamentali della meccanica dei sistemi -
niti di punti, passiamo allesame di alcune loro propriet` a immediatamente conseguenti ai
postulati.
Teorema 4.10.4 Per la dinamica di un sistema di punti materiali valgono le equazioni
cardinali:
(4.111)
_
_
dp
dt
= R
e
dK
O
dt
= p v
O
+ M
Oe
dT
dt
= W
dove
(4.112) R
e
=
F
e
`e il risultante delle sole forze esterne,
(4.113) M
Oe
=
F
Oe
146 Capitolo 4. Meccanica newtoniana
`e il momento risultante delle sole forze esterne rispetto ad un qualunque polo O di velocit` a
v
O
, e
(4.114) W =
`e la potenza di tutte le forze, sia interne che esterne al sistema.
Dimostrazione. Dimostriamo che per un sistema nito di punti materiali le equazioni
cardinali discendono dalle equazioni fondamentali (4.99), valide per ogni singolo punto, e
dal teorema delle forze interne (sono nulli il risultante ed il momento risultante, rispetto
ad un qualunque polo O, delle forze interne). Dalla denizione di p segue:
dp
dt
=
F
e
+
F
i
= R
e
,
e la (4.111)
1
`e dimostrata. Dalla denizione di K
O
segue:
dK
O
dt
=
d
dt
_
OP
_
=
(v
v
O
) m
OP
= v
O
OP
_
F
e
+F
i
_
= p v
O
+ M
Oe
,
e la (4.111)
2
`e dimostrata. Dalla denizione di T segue inne immediatamente la (4.111)
3
:
dT
dt
=
_
F
e
+F
i
_
= W
e
+ W
i
= W.
2
Le equazioni cardinali esprimono tre propriet` a dinamiche di media che vanno rispettiva-
mente sotto il nome di teorema della quantit` a di moto, teorema del momento
della quantit` a di moto (o del momento angolare) e teorema dellenergia. Esse non
sono in genere sucienti (a parte qualche caso particolare) a determinare il moto di ogni
singolo punto del sistema. Nelle prime due intervengono esplicitamente soltanto le forze
esterne. Vediamone alcune notevoli conseguenze.
Nota 4.10.1 Poiche p = mv
G
, lequazione (4.113)
1
equivale a
(4.115) ma
G
= R
e
Questequazione esprime il seguente teorema del moto del baricentro:
Teorema 4.10.5 Il baricentro di un sistema di punti si muove come punto materiale
dotato della massa totale del sistema e soggetto ad una forza pari al risultante delle forze
esterne.
4.10. Dinamica dei sistemi niti di punti 147
Esempio 4.10.2 Se le forze agenti su ogni singolo punto sono proporzionali alle rispet-
tive masse (come nel caso della forza peso) cio`e del tipo F
e
= m
g, allora si ha R
e
= mg
e il baricentro si muove secondo la legge a
G
= g qualunque siano gli eetti delle solleci-
tazioni interne al sistema. Lesempio classico `e quello di un proiettile che esplode durante
il tiro; mentre non `e in genere possibile prevedere i moti delle singole parti in cui viene
diviso, si pu` o aermare che il baricentro continua senza disturbi il moto che aveva prima
dellesplosione: questa infatti `e prodotta da sole forze interne al sistema.
Nota 4.10.2 Se il polo O `e sso oppure coincide con il baricentro, allora la seconda
equazione cardinale si riduce semplicemente a
(4.116)
dK
O
dt
= M
Oe
Infatti nel primo caso si ha v
O
= 0, nel secondo p v
G
= mv
G
v
G
= 0.
Nota 4.10.3 Sia a una retta, u un suo versore, O un suo punto. Cos` come per un
punto materiale, per un sistema di punti deniamo il momento assiale della quantit` a
di moto rispetto ad a:
(4.117) K
a
= K
O
u.
Tale numero non dipende dalla scelta di O sulla retta e cambia ovviamente di segno
cambiando u nel suo opposto (il momento assiale dipende dunque dal verso della retta).
In maniera analoga si denisce il momento assiale delle forze esterne,
(4.118) M
a
e
= M
Oe
u.
Se la retta a `e ssa nello spazio, la seconda equazione cardinale, moltiplicata scalarmente
per u, fornisce lequazione scalare
(4.119)
dK
a
dt
= M
a
e
Dalle equazioni cardinali seguono inne alcuni teoremi di conservazione, esprimenti,
sotto certe condizioni per le forze, lesistenza di integrali primi.
1. Se R
e
= 0, allora p = costante, vale a dire v
G
= costante. Si dice in questo caso che
sussiste lintegrale primo della quantit` a di moto. Pi` u in generale, se esiste un vettore
costante u tale che sia sempre R
e
u = 0, allora v
G
u = costante.
Esempio 4.10.3 Si consideri un sistema soggetto alla sola forza peso: il risultante `e
sempre ortogonale ad un qualunque pressato vettore orizzontale.
2. Se rispetto ad un polo O sso oppure coincidente con il baricentro si ha M
Oe
= 0,
allora K
O
= costante. Sussite cio`e lintegrale primo del momento della quantit` a di
moto. Si osservi che da M
Oe
u = 0, con u vettore costante, segue K
O
u = costante.
148 Capitolo 4. Meccanica newtoniana
Esempio 4.10.4 Si consideri il sistema solare, con Sole e pianeti assimilabili a punti
materiali. Ritenute trascurabili le forze esercitate dalle stelle su di questi, il sistema solare
`e un sistema isolato, vale a dire: R
e
= 0 e M
Ge
= 0. Pertanto il suo baricentro G si
muove rispetto ad un qualunque riferimento inerziale di moto rettilineo e uniforme, mentre
il momento della quantit` a di moto rispetto al baricentro K
G
`e costante. Il piano ad esso
ortogonale e passante per G `e sso nel riferimento inerziale individuato da G. Esso prende
il nome di piano di Laplace e coincide approssimativamente con il piano dellorbita
terrestre.
3. Se esiste una funzione U dipendente dalla posizione di tutti i punti, cio`e dalla con-
gurazione del sistema, tale che per ogni moto si ha
dU
dt
= W,
si dice che il sistema `e conservativo. La funzione U, denita a meno di una costante
additiva, `e detta potenziale. Dal teorema dellenergia segue allora lintegrale primo
dellenergia: T U = costante.
Esempio 4.10.5 Nel caso di un sistema le cui forze esterne sono le forze peso si ha, per
ogni congurazione del sistema,
U
e
= mg OG,
dove O `e un qualunque punto sso. Infatti:
W
e
=
g v
= g mv
G
=
dU
e
dt
.
4.11 Sistemi di vettori applicati
Sia o = (P
, v
); = 1, . . . , N un sistema di vettori applicati nello spazio ane
euclideo tridimensionale. Diciamo risultante del sistema o il vettore
(4.120) R =
momento risultante rispetto al punto o polo O il vettore
(4.121) M
O
=
OP
Il momento OP v di un singolo vettore applicato (P, v) `e, per le propriet` a del prodotto
vettoriale, un vettore ortogonale al piano individuato dai vettori OP e v, di modulo uguale
al prodotto del modulo di v per la distanza del polo O dalla retta di applicazione di
(P, v), cio`e della retta passante per P e parallela a v.
4.12. Baricentro di un sistema di masse 149
Facendo variare il polo nello spazio ane si ottiene un campo vettoriale M: P M
P
.
La seguente formula di trasposizione dei momenti consente di calcolare il momento
risultante nel polo P, noti il suo valore in un polo O e il risultante R:
(4.122) M
P
= M
O
+ R OP
Per dimostrarla basta considerare la decomposizione OP
= OP + PP
nella denizione
(4.121). Dalla (4.122) si deducono le propriet` a seguenti:
(4.123) M
O
= M
P
R parallelo a OP.
(4.124) M
O
= M
P
, O, P R = 0.
(4.125) M
O
R = M
P
R.
La (4.123) mostra che il momento risultante non varia spostando il polo lungo una retta
parallela al risultante R. La (4.124) mostra che il momento risultante non dipende dalla
scelta del polo se e solo se il risultante `e nullo. La (4.125) mostra che la componente
del momento risultante rispetto al risultante `e invariante rispetto alla scelta del polo.
Landamento del campo vettoriale M, nel caso in cui R ,= 0, `e ulteriormente chiarito dal
seguente enunciato:
Teorema 4.11.1 Dato un sistema di vettori applicati con R ,= 0 linsieme dei punti A
tali che il momento risultante M
A
`e parallelo ad R `e una retta parallela ad R, detta asse
centrale del sistema. Lasse centrale `e il luogo dei punti in cui il momento risultante ha
modulo minimo.
Siccome la (4.122) `e analoga alla seconda formula fondamentale di cinematica rigida (con
sostituito da R e il campo delle velocit` a sostituito da quello dei momenti) questo teorema
si identica col teorema di Mozzi (Teorema 3.3.3). Di conseguenza, tutte le propriet` a viste
per un atto di moto rigido valgono per il campo vettoriale dei momenti risultanti.
Due sistemi di vettori applicati o e o
si dicono equivalenti se i corrispondenti momenti
risultanti coincidono in ogni punto: M = M
. Per questo occorre e basta che i due sistemi
abbiano lo stesso risultante e lo stesso momento risultante rispetto ad un polo pressato:
o o
R = R
, M
O
= M
O
.
4.12 Baricentro di un sistema di masse
I concetti trattati in questo paragrafo sono puramente ani, sussistono cio`e in uno spazio
ane qualsiasi, senza struttura euclidea. Ci riferiamo comunque, per semplicit` a, allo
150 Capitolo 4. Meccanica newtoniana
spazio ane euclideo tridimensionale. I termini sistema di masse e sistema di punti
materiali sono sinonimi. Consideriamo un insieme nito di N punti materiali
M = (P
, m
); = 1, . . . , N.
Il baricentro (o centro di massa) di M `e il punto G denito dallequazione
(4.126)
GP
= 0
ovvero da
(4.127) OG =
1
m
OP
, m =
dove O`e un qualsiasi punto di riferimento ed m`e la massa totale del sistema. Osserviamo
innanzitutto che la denizione (4.127) non dipende dalla scelta del punto O. Infattti se P
`e un altro punto:
PG = PO + OG = PO +
1
m
OP
=
1
m
(PO + OP
) =
1
m
PP
.
La (4.127) denisce G in maniera univoca. Ponendo O = G nella (4.127) si trova la
(4.126). Viceversa, con la decomposizione GP
= GO+OP
= OP
OG dalla (4.126) si
ricava la (4.127). Le denizioni (4.126) e (4.127) sono dunque equivalenti.
Sia (x
) un qualunque sistema di coordinate cartesiane. Se denotiamo con (x
) le coordi-
nate del punto P
e con (x
G
) le coordinate del baricentro, dalla ((4.127) segue che
(4.128) x
G
=
1
m
.
Il baricentro di un sistema di masse gode delle seguenti propriet` a.
1. Propriet` a di appartenenza: se tutti i punti materiali stanno in un semispazio
delimitato da un piano allora il baricentro giace in quel semispazio. Basta considerare un
riferimento cartesiano per il quale il piano ha per esempio equazione x
1
= 0 ed i punti
sono tutti situati nel semispazio x
1
0. Dalla (4.128) segue necessariamente x
1
G
0 e il
baricentro sta nello stesso semispazio.
2. Se i punti materiali appartengono tutti ad un piano (o ad una retta) anche il baricentro
appartiene a quel piano (a quella retta). Si applica la propriet` a precedente ai due semispazi
determinati dal piano.
3. Se i punti sono contenuti in un dominio chiuso convesso allora anche il baricentro `e
contenuto in quel dominio. Infatti un tale dominio `e lintersezione di semispazi.
4.12. Baricentro di un sistema di masse 151
4. Propriet` a di partizione o distributiva: se il sistema di masse M `e lunione di due
sistemi di masse disgiunti M
e M
allora il baricentro G di M coincide col baricentro
del sistema costituito dai due baricentri di M
e M
dotati delle rispettive masse totali. Si
consideri infatti il sistema suddiviso in due sottosistemi disgiunti M
= (P
, m
);
=
1, . . . , N
e M
= (P
, m
);
= N
+ 1 . . . , N. Dalla denizione (4.127) segue
m
OG
OP
, m
OG
OP
.
Dunque:
m
OG
+m
OG
OP
= mOG.
Si osservi che la propriet` a distributiva vale pi` u in generale per una qualunque partizione
del sistema, in pi` u di due sottosistemi disgiunti.
5. Propriet` a di simmetria. Un piano si dice piano di simmetria materiale
coniugato alla direzione u (u `e un vettore non nullo, eventualmente unitario) se per
ogni coppia (P
, m
) del sistema di masse esiste una coppia (P
, m
) tale che: (i) m
= m
,
(ii) P
`e parallelo a u, (iii) il punto medio di P
appartiene a . Non si esclude che
sia P
= P
. Allora: un piano di simmetria materiale contiene il baricentro. Basta
applicare la propriet` a distributiva 4 e la propriet` a 2, considerando il sistema come unione
del sistema dei punti che stanno sul piano di simmetria e delle coppie dei punti materiali
simmetrici, il cui baricentro giace su .
La nozione di baricentro, insieme a tutte le propriet` a viste per il caso di un sistema nito
di punti materiali, si estende al caso di un sistema materiale continuo. Un tale sistema
`e denito da una coppia (D, ) dove D `e un dominio di dimensione k (= 3, 2, 1) e una
funzione su D, detta densit` a di massa, tale che abbia senso considerare gli integrali
m =
_
D
, OG =
1
m
_
D
OP ,
dove `e la k-forma elemento di volume (o area, o di lunghezza). Se `e costante si
dice che il sistema materiale `e omogeneo. Per i sistemi omogenei le formule ottenute
continuano a valere con = 1 e intendendo la massa totale m uguale al volume, o allarea,
o alla lunghezza del dominio. Sussitono a questo proposito i seguenti classici teoremi di
Guldino:
11
Teorema 4.12.1 Il volume del solido generato dalla rotazione di un dominio piano
intorno ad una retta del piano stesso, che non lo interseca, `e uguale al prodotto dellarea
del dominio per la lunghezza della circonferenza descritta dal suo baricentro.
Teorema 4.12.2 Larea della supercie generata da un arco di curva piana ruotata
intorno ad una retta del suo piano `e uguale al prodotto della lunghezza dellarco per quella
della circonferenza descritta dal suo baricentro.
11
Paul Guldin, 1577-1643.
152 Capitolo 4. Meccanica newtoniana
Dimostrazione. Si consideri un sistema di coordinate cartesiane ortonormali tale che
lasse z sia asse di rotazione e il dominio piano stia sul piano (x, z). Allora la coordinata
x del suo baricentro `e
x
G
=
1
A
_
D
x dx dz,
essendo A la sua area. Daltra parte il volume V del solido di rotazione `e la somma,
cio`e lintegrale, dei volumi elementari degli anelli ottenuti facendo ruotare elementi del
dominio, vale a dire:
V =
_
D
2 x dx dz.
Quindi: V = 2 x
G
A. In maniera analoga si dimostra il secondo teorema di Guldino. 2
4.13 Dinamica del corpo rigido
Le considerazioni svolte nel paragrafo precedente si applicano in particolare ai sistemi
rigidi costituiti da un numero nito di punti materiali (P
, m
); = 1, . . . , N. I ri-
sultati che si ottengono sono comunque validi per un corpo rigido continuo. Mentre le
caratteristiche inerziali di un singolo punto sono riassunte in un numero positivo, la sua
massa inerziale, per un corpo rigido le caratteristiche inerziali sono invece rappresentate
dal tensore dinerzia. Gli elementi fondamentali della teoria dei tensori dinerzia sono
raccolti al 4.17.
Teorema 4.13.1 In un corpo rigido per il momento angolare K
O
, lenergia cinetica T
e la potenza W di un qualunque sistema di forze (P
, F
) valgono le espressioni seguenti:
(4.129)
_
_
K
O
= mOG v
O
+I
O
()
T =
1
2
K
O
+
1
2
p v
O
W = M
O
+R v
O
dove m `e la massa totale del corpo, G `e il baricentro, O `e un punto solidale, v
O
la sua
velocit` a, la velocit` a angolare del corpo rigido, I
O
`e il tensore dinerzia nel punto O, R
e M
O
sono il risultante ed il momento risultante del sistema di forze.
Dimostrazione. Ricordata la seconda formula fondamentale di cinematica rigida, per
un qualunque punto solidale O si ha
v
= v
O
+ OP
,
denotata per semplicit` a con v
la velocit` a del punto P
. Per la denizione di I
O
formula
(4.168) si ha successivamente:
K
O
=
OP
OP
(v
O
+ OP
)
= mOG v
O
+
(OP
) OP
= mOG v
O
+ I
O
().
4.13. Dinamica del corpo rigido 153
Di qui la (4.129)
1
. La (4.129)
2
segue da:
T =
1
2
v
2
=
1
2
(v
O
+ OP
)
=
1
2
p v
O
+
1
2
OP
.
La (4.129)
3
segue da:
W =
(v
O
+ OP
)
= R v
O
+
OP
= R v
O
+
OP
. 2
Nota 4.13.1 Se il polo O coincide col baricentro (che `e punto solidale) oppure se O `e
un punto solidale sso (v
O
= 0), allora, omettendo il susso O, lespressione del momento
angolare si semplica in
(4.130) K = I()
Denotati con (i, j, k) i versori della terna principale dinerzia relativa al punto O, con
(A, B, C) i rispettivi momenti principali dinerzia, con (p, q, r) le componenti secondo
questa terna della velocit` a angolare, posto cio`e
(4.131) = p i +q j +r k,
dalla (4.130) segue la formula
(4.132) K = Ap i + Bq j +C r k
che esprime il momento angolare relativo ad un punto sso o al baricentro secondo la terna
principale dinerzia in quel punto.
Nota 4.13.2 Se O `e un punto solidale sso lenergia cinetica si riduce a
(4.133) T =
1
2
K =
1
2
I()
dove I `e la forma quadratica dinerzia nel punto O. Siccome la velocit` a angolare `e ad ogni
istante parallela allasse di Mozzi a, dalla (4.133) segue
(4.134) T =
1
2
I
a
2
dove I
a
`e il momento dinerzia rispetto allasse di Mozzi. Dalla (4.133) segue anche,
secondo le notazioni considerate nella precedente osservazione,
(4.135) T =
1
2
_
Ap
2
+ Bq
2
+C r
2
_
.
154 Capitolo 4. Meccanica newtoniana
Nota 4.13.3 Se si considera il sistema delle forze interne, che `e equivalente a zero, dalla
(4.129)
3
segue
W
i
= 0.
Dunque: le forze interne di un corpo rigido hanno potenza nulla.
Dopo le premesse sulle grandezze cinetiche del corpo rigido passiamo ora a considerare le
equazioni della dinamica. Come per ogni sistema di punti materiali anche per un corpo
rigido valgono le equazioni cardinali della meccanica. Nel caso del corpo rigido per` o accade
che:
(I) le due prime equazioni, vale a dire il teorema della quantit` a di moto ed il teorema del
momento della quantit` a di moto, che qui scriviamo rispetto ad un polo O sso o coincidente
col baricentro,
(4.136)
dp
dt
= R
e
,
dK
dt
= M
e
descrivono completamente la dinamica, sono cio`e equazioni dierenziali sucienti a deter-
minare i moti del corpo rigido;
(II) la terza equazione cardinale, vale a dire lequazione dellenergia
(4.137)
dT
dt
= W
e
,
`e una conseguenza delle precedenti. Va inoltre osservato che le reazioni vincolari re-
sponsabili della rigidit` a del corpo sono forze soddisfacenti al postulato delle forze interne
al sistema e non intervengono pertanto nelle equazioni cardinali, neanche nel teorema
dellenergia, per quanto visto nell Nota 4.13.3.
Rinunciando alla discussione del punto (I), dimostriamo soltanto che la (4.137) `e con-
seguenza delle (4.136). Posto come si `e detto O = G, per la (4.129)
2
e la (4.135) si
ha
(4.138) T =
1
2
_
Ap
2
+ Bq
2
+ Cr
2
_
+
1
2
mv
G
v
G
.
Daltra parte, stante la (4.132), denotando brevemente con il punto sovrapposto la derivata
rispetto al tempo e facendo intervenire le formule di Poisson, si ha
K = A p i + B q j +C r k + Ap i + Bq j +C r k,
quindi
(4.139)
K = A p i +B q j + C r k + K.
Di qui si osserva che
K = Ap p +Bq q +C r r.
Se allora si deriva la (4.138) e si applicano le (4.136), si trova la (4.137):
T = Ap p +B q q + C r r + ma
G
v
G
=
K + p v
G
= M
e
+R
e
v
G
= W
e
.
4.14. Corpo rigido con un punto sso 155
4.14 Corpo rigido con un punto sso
Consideriamo il caso di un corpo rigido con un punto sso O. In questo caso la seconda
equazione cardinale si scrive semplicemente
(4.140)
K = M,
dove K e M sono il momento angolare e il momento delle forze esterne di polo O. Per
la formula (4.139) del paragrafo precedente, sviluppando il prodotto K, lequazione
vettoriale (4.140) si traduce nelle tre equazioni scalari
(4.141)
_
_
A p (B C) q r = X,
B q (C A) r p = Y,
C r (A B) p q = Z,
dove (X, Y, Z) sono le componenti del momento delle forze esterne M rispetto alla terna
principale dinerzia. Queste sono le celebri equazioni di Euler della dinamica del corpo
rigido.
Le equazioni di Euler sono equazioni dierenziali del primo ordine nelle componenti della
velocit` a angolare p(t), q(t), r(t) secondo la terna principale dinerzia. I secondi membri,
vale a dire le componenti del momento delle forze esterne, dipendono in generale dalla
posizione del corpo e dalla velocit` a dei suoi punti, cio`e dallatto di moto. Essi si esprimono
quindi come funzioni dei tre parametri scelti per rappresentare la posizione del corpo rigido,
delle tre componenti la velocit` a angolare ed eventualmente del tempo (se le forze attive
dipendono dal tempo).
Se come parametri si scelgono gli angoli di Euler (3.1.6) in modo tale che la terna prin-
cipale dinerzia (i, j, k) coincida con la terna (e
1
, e
2
, e
3
) allora alle equazioni di Euler
(4.141) vanno aancate le equazioni che esprimono le componenti della velocit` a angolare
in funzione degli angoli di Euler e delle loro derivate rispetto al tempo, cio`e le equazioni
(3.67):
(4.142)
_
_
p = cos
+ sin sin
,
q = cos sin
sin
,
r = cos
+
.
Queste equazioni, lineari nelle (
,
,
), possono essere risolte per sin ,= 0:
(4.143)
_
=
1
sin
(p sin +q cos ),
= p cos q sin ,
= r
1
sin
(p sin cos + q cos cos ).
156 Capitolo 4. Meccanica newtoniana
Il sistema complessivo delle equazioni (4.141) +(4.143) `e allora equivalente ad un sistema
di sei equazioni dierenziali del primo ordine in forma normale nelle sei funzioni incognite
(t), (t), (t), p(t), q(t) e r(t), almeno nel caso in cui nessuno dei momenti principali
dinerzia si annulli (il caso in cui uno di questi si annulla, caso degenere, richiede una
trattazione a parte).
Lintegrazione di questo sistema, che fornisce i moti del corpo rigido intorno al punto sso,
presenta in genere delle notevoli dicolt` a, anche in casi apparentemente semplici, come
per esempio nel caso in cui le componenti (X, Y, Z) siano nulle (moti alla Poinsot, 4.15)
oppure nel caso in cui sul corpo agisca una forza costante (come si vedr` a nel Cap. 5). Si va
allora alla ricerca di eventuali integrali primi tramite i quali dedurre propriet` a qualitative
o geometriche dei moti.
***
Risoluzione del sistema lineare (4.142).
_
_
p
q
r
_
_
=
_
_
sin sin cos 0
cos sin sin 0
cos 0 1
_
_
= M
_
_
.
det M = sin.
M
C
=
_
_
sin cos sin sin cos
cos sin sin cos cos
0 0 sin
_
_
.
M
CT
=
_
_
sin cos 0
cos sin sin sin 0
sin cos cos cos sin
_
_
.
M
1
=
1
sin
_
_
sin cos 0
cos sin sin sin 0
sin cos cos cos sin
_
_
.
_
_
=
1
sin
_
_
sin cos 0
cos sin sin sin 0
sin cos cos cos sin
_
_
p
q
r
_
_
.
Nota 4.14.1 Le forze reattive esterne al corpo, responsabili del mantenimento del punto
sso O, si sommano in una forza applicata in O e quindi non danno alcun contributo al
momento delle forze esterne M. Esse danno per` o un contributo al risultante delle forze
esterne che interviene nella prima equazione cardinale. Questequazione pertanto, noto
il moto del corpo rigido e noto il risultante delle forze esterne attive, serve proprio alla
determinazione del risultante delle forze reattive.
4.15. Moti alla Poinsot 157
4.15 Moti alla Poinsot
Si dicono moti alla Poinsot,
12
o anche moti rigidi spontanei, i moti di un corpo rigido
con un punto sso soggetto ad un sistema di forze il cui momento risultante, rispetto al
punto sso, `e nullo.
Sono esempi notevoli di moti alla Poinsot:
(i) il moto di un corpo rigido ssato nel baricentro e soggetto alla gravit` a,
(ii) il moto rispetto al baricentro di un corpo rigido in caduta libera.
Nel primo caso infatti, essendo F
e
= m
g, risulta: M
Ge
=
GP
g =
GP
g = 0 perche
GP
= 0. Nel secondo caso, poiche ci si pone in un riferimento che si
muove di moto traslatorio rispetto al riferimento in cui la forza peso `e ritenuta costante,
e che viene assunto come inerziale, si ha F
e
= m
(g a
G
), essendo m
a
G
la forza di
trascinamento. Per cui, come sopra, si trova M
Ge
= 0.
Nel caso dei moti alla Poinsot la seconda equazione cardinale diventa
(4.144)
K = 0
e le equazioni di Euler si semplicano in
(4.145)
_
_
A p (B C) q r = 0,
B q (C A) r p = 0,
C r (AB) p q = 0.
Queste sono le equazioni di Euler-Poinsot. Formano un sistema del primo ordine
nelle sole funzioni incognite p(t), q(t), r(t) che, se nessuno dei momenti principali dinerzia
(A, B, C) `e nullo, pu` o porsi in forma normale. La sua integrazione consente di determinare
la velocit` a angolare e quindi il moto del corpo rigido a partire da un atto di moto iniziale.
Lequazione cardinale (4.144) mostra che il momento angolare `e un integrale primo (vet-
toriale):
(4.146) K = costante.
Il teorema dellenergia, annullandosi anche la potenza delle forze esterne, mostra che anche
lenergia cinetica `e un integrale primo:
(4.147) T =
1
2
K = costante.
Questi due integrali primi producono una notevole propriet` a geometrica dei moti alla
Poinsot:
Teorema 4.15.1 Teorema di Poinsot: in ogni moto alla Poinsot lellissoide dinerzia
relativo al punto sso O rotola senza strisciare su di un piano sso ortogonale al momento
angolare costante K
O
.
12
Louis Poinsot, 1777-1859.
158 Capitolo 4. Meccanica newtoniana
_
`
..........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.................................................................................................
...................................................................................................................................................................................................................................................................................................................................................................................................................................
a
O
d
K
Figura 4.15: Il teorema di Poinsot (in sezione).
Per la sua dimostrazione occorre utilizzare una propriet` a generale dei moti rigidi con un
punto sso:
Lemma 4.15.1 In un qualunque moto rigido con un punto sso O, in ogni istante in cui
,= 0, il momento angolare K rispetto al punto sso `e ortogonale allellissoide dinerzia
relativo ad O nei punti di intersezione con lasse di Mozzi e forma angolo acuto con la
velocit` a angolare (Figura 4.15).
Dimostrazione. Si consideri il riferimento principale dinerzia in O, di coordinate
(x, y, z). Lellissoide dinerzia ha equazione
Ax
2
+ By
2
+C z
2
= 1.
Il gradiente della funzione a primo membro, le cui componenti sono (2Ax, 2By, 2Cz), `e un
vettore ortogonale allellissoide nel punto P di coordinate (x, y, z) (teorema del gradiente).
Se questo punto sta sullasse di Mozzi, che `e parallelo a di componenti (p, q, r), allora
il gradiente `e parallelo al vettore di componenti (Ap, Bq, Cr). Ma queste sono appunto le
componenti di K: la prima parte dellenunciato `e dimostrata. Osservato poi che K =
2T e che lenergia cinetica `e sempre positiva o nulla, si conclude che langolo tra e K `e
sempre acuto o retto. Ma il caso in cui K = 0 corrisponde a T = 0, cio`e = 0. 2
Dimostrazione del teorema di Poinsot. In virt` u del Lemma 4.15.1 il piano tangente
allellissoide dinerzia in uno dei due punti dintersezione con lasse di Mozzi ha giacitura
costante, perche `e ortogonale al vettore costante K. Si prenda il piano tangente nel punto
P per cui OP e sono concordi. Per il signicato dellellissoide dinerzia e per quanto
visto sullenergia cinetica si ha
(4.148)
1
[OP[
2
= I
a
=
2T
2
.
4.15. Moti alla Poinsot 159
Sia langolo formato tra e K. Allora
cos =
K
[K[ [[
=
2T
[K[ [[
.
Daltra parte, se d `e la distanza del piano dal punto O, per la (4.148) si ha
(4.149) d = [OP[ cos =
2T [OP[
[K[ [[
=
2T
[K[
.
Poiche T e K sono costanti, d `e costante: dunque il piano `e sso. Poiche il punto P di
contatto tra ellissoide e piano sta sullasse di Mozzi, la velocit` a di P, pensato solidale al
corpo, `e nulla quindi lellissoide rotola senza strisciare su . 2
4.15.1 Moti stazionari
Teorema 4.15.2 Tra i moti alla Poinsot esistono moti rotatori cio`e con un asse
sso. Essi sono necessariamente uniformi ( = costante) e intorno ad un asse principale
dinerzia.
13
Dimostrazione. I moti rotatori sono caratterizzati dallavere lasse di Mozzi sso. Dal
teorema di Poinsot si vede che lasse di Mozzi `e sso se e solo se il punto P di contatto
tra lellissoide ed il piano `e sso. Daltra parte un ellissoide con centro sso pu` o rotolare
senza strisciare su di un piano sso se e solo se il punto di contatto coincide con un suo
vertice e quindi appartiene ad uno degli assi. Inoltre, se P `e sso, `e costante. 2
Definizione 4.15.1 I moti rigidi con punto sso e con costante si dicono stazionari.
Il teorema precedente aerma allora che moti alla Poinsot stazionari sono possibili solo
intorno agli assi principali dinerzia.
4.15.2 Moti di precessione regolare
Teorema 4.15.3 I moti alla Poinsot sono moti di precessione regolare se e solo se
lellissoide dinerzia nel punto sso O `e rotondo.
Dimostrazione. Se lellisoide in O`e rotondo il punto di contatto P descrive sul piano sso
(e anche sullellisoide stesso) una circonferenza. Quindi la distanza [OP[ `e costante, col
che [[ `e costante. Siccome P sta sullasse di Mozzi, i coni di Poinsot sono rotondi. Quello
mobile rotola su quello sso con velocit` a costante perche `e costante lenergia cinetica. 2
13
I teoremi che vengono proposti in questo e nel successivo sottoparagrafo mostrano la potenza dei ragiona-
menti geometrici basati sul teorema di Poinsot e che, tra laltro, evitano il ricorso alle equazioni generali
della dinamica del corpo rigido viste al 4.14.
160 Capitolo 4. Meccanica newtoniana
Nota 4.15.1 Lequazione cardinale (4.144) `e equivalente allequazione vettoriale
(4.150)
K = K ,
dove ora la derivata temporale sintende riferita al corpo rigido. Infatti denotate con DK
e con D
K le derivate temporali di un vettore generico K fatte rispetto al riferimento
sso e al riferimento solidale al corpo rigido, vale la formula (3.43):
DK = D
K + K.
Sicche lequazione (4.144) DK = 0 `e equivalente a D
K + K = 0, cio`e alla (4.150).
Questa `e dunque la seconda equazione cardinale riferita al corpo, scritta cio`e nel riferimento
solidale. Se ci si pone nel riferimento solidale (i, j, k) appare pi` u naturale considerare le
equazioni di Euler (4.145) come sistema dinamico nello spazio R
3
delle componenti
(4.151) x = Ap, y = Bq, z = Cr
del vettore momento angolare K rispetto alla terna solidale. Il sistema (4.145) `e allora
equivalente al sistema normale
(4.152)
_
_
x = (c b) y z
y = (a c) z x
z = (b a) x y
posto (si suppone, al solito, che nessuno dei momenti principali dinerzia sia nullo)
(4.153) a =
1
A
, b =
1
B
, c =
1
C
.
Questo sistema possiede due integrali primi. Il primo `e conseguente allintegrale dellener-
gia 2T = Ap
2
+Bq
2
+Cr
2
= costante e si scrive
(4.154) ax
2
+ by
2
+cz
2
= h
2
.
Il secondo `e [K[ = costante cio`e
14
(4.155) x
2
+ y
2
+ z
2
= k
2
.
Le orbite del sistema dinamico (4.152) sono dunque date dallintersezione delle sfere di
equazione (4.155) con gli ellissoidi di equazione (4.154) che prendono il nome di ellissoidi
dellenergia. Si tratta di curve chiuse, che degenerano nei vertici degli ellissoidi gli
assi (x, y, z) sono luogo di punti singolari. Lo studio di queste curve consente tra laltro di
ottenere un teorema sulla stabilit` a dei moti di Poinsot stazionari intorno agli assi principali
dinerzia, peraltro gi` a considerato nellEsempio 1.15.1.
14
(K `e costante nello spazio ma non `e costante rispetto al corpo rigido; `e costante il suo modulo).
4.15. Moti alla Poinsot 161
Si consideri il caso di un corpo rigido asimmetrico rispetto ad O: lellissoide dinerzia non
`e rotondo (nel caso simmetrico, come si `e gi` a osservato, i moti del corpo rigido sono di
precessione regolare). Si supponga
A > B > C (a < b < c).
A seconda dei valori delle costanti h =
2T e k = [K[ lintersezione della sfera (4.155) di
raggio k con lellissoide (4.154) di semiassi (h
A, h
B, h
C) `e di vario tipo.
(i) Se k < h
C, `e vuota; la sfera `e interna allellissoide e non vi `e alcun moto reale; questa
relazione tra le costanti `e impossibile.
(ii) Se k = h
C, `e costituita dai due vertici dellellissoide sullasse z.
(iii) Se h
B > k > h
C, `e costituita da due curve chiuse, simmetriche rispetto al piano
(x, y), intorno ai suddetti vertici.
(iv) Se k = h
B, `e costituita da due circonferenze passanti per i vertici dellasse y.
(v) Se h
A > k > h
B, `e costituita da due curve chiuse simmetriche rispetto al piano
(y, z).
(vi) Se k = h
A, `e costituita dai due vertici sullasse x.
(vii) Se inne k > h
A, `e vuota e anche questa relazione tra le costanti `e impossibile.
Nei casi (iii) e (v) si hanno dei moti di K periodici. Nei casi (ii) e (vi) il vettore K `e
costante anche nel corpo ed i moti del corpo rigido sono stazionari. Questi moti sono stabili,
nel senso che una piccola perturbazione trasforma il moto stazionario in una piccola orbita
chiusa di K. Il caso singolare (iv) comprende invece due distinte situazioni: quella di un
moto stazionario intorno allasse y e quella di un moto di K lungo una semicirconferenza
(si tratta di un moto asintotico). Di qui si osserva che il moto stazionario intorno allasse
y `e instabile. Si `e cos` dimostrato che i moti stazionari intorno agli assi di massimo e
minimo momento dinerzia sono stabili, quelli intorno allasse intermedio sono instabili.
4.15.3 Equazioni di Lax
Si considerino gli endomorsmi antisimmetrici aggiunti dei vettori K e (si veda la Nota
3.2.1 e il 5.10):
(4.156) L = K, = .
Si dimostra che per due vettori qualsiasi vale luguaglianza
(K ) = [L, ],
dove
[L, ] = LL
`e il commutatore dei due endomorsmi. Lequazione (4.150) risulta allora equivalente
allequazione
(4.157)
L = [L, ]
162 Capitolo 4. Meccanica newtoniana
Lo si pu` o anche riconoscere direttamente considerando le matrici
L = [L
] =
_
_
0 Cr Bq
Cr 0 Ap
Bq Ap 0
_
_
, = [
] =
_
_
0 r q
r 0 p
q p 0
_
_
,
le quali rappresentano proprio le forme bilineari antisimmetriche aggiunte di K e (si
conviene che il primo indice sia indice di riga). Il commutatore C = [L, ] = LL
delle due matrici ha componenti
C
_
.
Quindi:
[C
] =
_
_
0 (AB)pq (AC)pr
(B A)pq 0 (B C)qr
(C A)pr (C B)qr 0
_
_
.
Si vede allora che le equazioni di Euler-Poinsot (4.145) equivalgono proprio alle equazioni
= C
, quindi allequazione (4.157).
Unequazione dierenziale del tipo (4.157), coinvolgente endomorsmi L e sopra uno
spazio vettoriale E reale e a dimensione nita (quindi coinvolgente matrici reali quadrate),
prende il nome di equazione di Lax.
15
Si dice inoltre che un sistema dinamico, ossia un
campo vettoriale X sopra uno spazio di coordinate (x
), ammette una rappresentazione
di Lax se il sistema dierenziale del primo ordine ad esso associato risulta traducibile in
unequazione del tipo (4.157). Lutilit` a della rappresentazione di Lax risiede nel fatto
che da essa si ricavano immediatamente integrali primi. Segue infatti dalla (4.157) che le
tracce
16
(4.158) F
k
=
1
k
tr
_
L
k
_
, k Z,
sono integrali primi (il fattore
1
k
`e inessenziale ma `e conveniente per ragioni formali).
Infatti:
1
k
d
dt
tr
_
L
k
_
= tr
_
LL
k1
_
= tr
_
[L, ] L
k1
_
= tr
_
LL
k1
L
k
_
= 0.
Anzi, se vale anche la condizione
(4.159) tr
_
L
_
= tr
_
L
_
,
15
Peter Lax, Courant Institute di New York.
16
La traccia tr(A) di un endomorsmo lineare A su di uno spazio vettoriale E `e la somma degli elementi
della diagonale principale della matrice delle componenti secondo una base qualunque di E (non dipende
infatti dalla base scelta).
`
E uguale alla somma degli autovalori.
4.16. Corpo rigido con un asse sso 163
allora anche la funzione
(4.160) T =
1
2
tr
_
L
_
`e un integrale primo. La dimostrazione `e analoga alla precedente.
Se gli endomorsmi L e sono antisimmetrici, come nel caso delle equazioni di Euler-
Poinsot, tutti gli F
k
sono nulli per k dispari. Per k = 2, siccome per qualunque vettore
K = L si ha
tr(L
2
) = 2 K
2
(K
2
= K K),
si vede che `e proprio
F
2
= K
2
.
Per valori pari di k si hanno integrali primi dipendenti da questo. Inne, poiche per due
qualunque vettori K = L e = vale la formula
tr(L) = 2 K ,
si vede che lintegrale primo (4.160) coincide proprio con lenergia cinetica, mentre la
(4.159) `e vera perche
K = K (per vericare questuguaglianza basta ricordare che
K = I()).
4.16 Corpo rigido con un asse sso
Consideriamo inne il caso di un corpo rigido con asse sso. Le forze vincolari si
esplicano tutte sullasse sso quindi, in assenza di attriti, il loro momento assiale rispetto
allasse sso a `e da ritenersi nullo. Essendo lasse sso a asse di Mozzi e quindi parallelo
al suo versore u, posto
= u,
risulta
(4.161) K
a
= K
O
u = I
O
() u = I
O
(u) = I
a
,
con I
a
momento dinerzia rispetto allasse a. Pertanto la seconda equazione cardinale
proiettata sullasse a diventa
(4.162) I
a
= M
a
.
La posizione del corpo rigido `e determinata dallangolo di rotazione concorde col versore
u, per cui =
u. Lequazione (4.162) diventa
(4.163) I
a
= M
a
.
Il momento assiale delle forze esterne attive M
a
dipende in generale dalla posizione e dalla
velocit` a angolare del corpo rigido, quindi `e una funzione nota di e
. Pertanto la sola
equazione (4.163) `e suciente a determinare il moto.
164 Capitolo 4. Meccanica newtoniana
Esempio 4.16.1 Il pendolo composto.
`
E un corpo rigido vincolato a ruotare senza
attrito attorno ad un asse sso orizzontale (asse di sospensione) e soggetto alla sola
forza peso. Sia O il punto proiezione ortogonale del baricentro G sullasse di sospensione
a. Il punto O prende il nome di centro di sospensione. Se si misura langolo di rotazione
a partire dalla posizione in cui il vettore OG `e verticale discendente risulta
M
a
= mg d sin, d = [OG[.
Pertanto lequazione di moto (4.163) diventa
(4.164) I
a
+ mg d sin = 0.
Se si pone
(4.165) =
I
a
md
,
si ottiene unequazione analoga a quella del pendolo semplice di lunghezza :
(4.166)
+
g
sin = 0.
Questa lunghezza viene detta lunghezza ridotta del pendolo. Il punto P sulla retta OG
distante da O prende il nome di centro di oscillazione del pendolo. La retta per P
parallela allasse di sospensione prende il nome di asse di oscillazione. La denotiamo
con a
e poniamo d
= [PG[. Linteresse di queste denizioni `e dovuto al teorema di
Huygens:
17
Teorema 4.16.1 Un pendolo composto oscilla nello stesso modo scambiando lasse di
sospensione col corrispondente asse di oscillazione.
Dimostrazione. Sia g lasse per il baricentro parallelo ad a. Per il teorema di Huygens
relativo ai momenti dinerzia si ha
I
a
= I
g
+md
2
,
quindi
(4.167) =
I
g
md
+d.
Di qui si deduce innanzitutto che > d, quindi che G `e compreso tra O e P. Se ora si
assume come asse sso lasse a
, in analogia con la (4.167), deve essere
=
I
g
md
+d
.
Tenuto allora conto che d
= l d, di qui e dalla (4.167) si deduce
=
I
g
md
+
I
g
md
.
Dalla simmetria di questa formula segue =
e il teorema di Huygens `e dimostrato. 2
17
Christiaan Huygens, 1629-1695.
4.17. Tensore dinerzia di un sistema di masse 165
_
`
P
G
. . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . ......................
.....................
....................................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . .
. . .. . .. .. .. .. ... .... .
. . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . ......................
.....................
..................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . .
. . .. . .. .. .. ... ... ....
d
.
..
..
..
...
.
. .
. . .
. .
. .
..
..
..
..
..
...
..
..
..
.
.. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . .. . . . . . . . . .. . . . . . . . .. . . . . . . . . .. . .
g
Figura 4.16: Pendolo composto.
4.17 Tensore dinerzia di un sistema di masse
Si consideri un sistema di masse M = (P
, m
); = 1, . . . , N nello spazio ane euclideo
tridimensionale E
3
(con spazio vettoriale soggiacente E
3
).
Definizione 4.17.1 Chiamiamo tensore dinerzia di M nel punto O E
3
lendo-
morsmo lineare I
O
: E
3
E
3
denito da
18
(4.168) I
O
(v) =
(OP
v) OP
.
18
Un tensore T di tipo (p, q) su di uno spazio vettoriale E (reale e a dimensione nita) `e unapplicazione
multilineare
T : E
. . . E
| {z }
p volte
E E . . . E
| {z }
q volte
R.
Per esempio, una forma bilineare : E E R `e un tensore di tipo (0, 2) (di qui il termine tensore
metrico usato per un prodotto scalare di vettori). Anche un endomorsmo lineare A su E pu`o essere
visto come tensore di tipo (1,1) ponendo, per ogni vettore v E e ogni covettore E
,
A(, v) = A(v), ).
A primo membro abbiamo il tensore A, a secondo membro lendomorsmo A (si usa lo stesso simbolo).
Questo giustica luso del termine tensore dinerzia al posto di endomorsmo dinerzia.
166 Capitolo 4. Meccanica newtoniana
Per la formula del doppio prodotto vettoriale
19
la denizione (4.168) equivale a
(4.169) I
O
(v) =
_
[OP
[
2
v OP
v OP
_
.
Dalla denizione (4.168) segue, per la propriet` a di scambio del prodotto misto,
20
I
O
(v) u =
(OP
v) (OP
u).
Dunque il tensore dinerzia I `e simmetrico:
21
I
O
(v) u = I
O
(u) v.
Denotiamo ancora con lo stesso simbolo, com`e consuetudine, la forma bilineare simmetrica
associata. Poniamo cio`e
(4.170) I
O
(v, u) = I
O
(v) u.
Denotiamo invece con I
O
la forma quadratica associata a I
O
, detta forma dinerzia nel
punto O, denita da
(4.171) I
O
(v) = I
O
(v) v =
[OP
v[
2
.
Nota 4.17.1 Segue immediatamente dalla denizione (4.168) che il tensore dinerzia
I
O
(e quindi anche la forma dinerzia I
O
) sono funzioni additive di sistemi materiali,
vale a dire: se M
e M
sono due sistemi materiali disgiunti e I
O
e I
O
sono i rispettivi
tensori dinerzia, allora I
O
= I
O
+I
O
`e il tensore dinerzia del sistema M = M
.
Definizione 4.17.2 Chiamiamo momento dinerzia rispetto ad una retta a il numero
I
a
, positivo o nullo, dato dalla somma dei prodotti delle masse m
per le distanze al
quadrato dei punti P
dalla retta a:
(4.172) I
a
=
_
d(a, P
)
_
2
.
Per le propriet` a del prodotto vettoriale,
_
d(a, P
)
_
2
= [OP
u[
2
,
19
`
E la formula (u v) w = u w v v w u.
20
Il prodotto misto non cambia se si scambiano fra loro i due prodotti: u v w = u v w.
21
Un endomorsmo lineare A su di uno spazio vettoriale dotato di tensore metrico `e simmetrico se A
T
=
A, cio`e se A(u) v = A(v) u per ogni coppia di vettori. Si dimostra che, se il tensore metrico `e
denito positivo, gli autovalori di un endomorsmo simmetrico sono tutti reali ed inoltre gli autovettori
corrispondenti ad autovalori distinti sono fra loro ortogonali. La forma quadratica associata ad A`e denita
positiva se e solo se gli autovalori sono positivi.
4.17. Tensore dinerzia di un sistema di masse 167
dove u `e un versore della retta a ed O un suo qualunque punto. Quindi, per la (4.171),
(4.173) I
a
= I
O
(u), O a, u versore di a
Pertanto: il momento dinerzia rispetto ad una retta `e uguale al valore che la forma
dinerzia relativa ad un qualunque suo punto assume su di un suo versore.
Vediamo come varia il tensore dinerzia I
O
, quindi anche la forma dinerzia I
O
, al variare
del punto O. Le formule seguenti, che chiamiamo formule di trasposizione, consentono
di calcolare I
O
e I
O
in un qualunque punto O quando siano noti i loro valori nel baricentro
G del sistema
(4.174)
_
_
_
I
O
(v) = I
G
(v) + m(OG v) OG,
I
O
(v) = I
G
(v) +m[OGv[
2
,
(m `e la massa totale). Si ha infatti successivamente:
I
O
(v) =
(OP
v) OP
_
(OG+GP
) v
_
(OG+ GP
)
= m(OGv) OG+ (OGv)
GP
+
+
__
GP
_
v
_
OG+
(GP
v) GP
= m(OGv) OG+I
G
(v),
ricordato che, per denizione di baricentro, `e
GP
= 0. La seconda della (4.174)
segue immediatamente dalla prima. Immediata conseguenza delle formule di trasposizione
`e il seguente teorema di Huygens sui momenti dinerzia:
Teorema 4.17.1 Sia a una retta e sia g la retta parallela ad a passante per il baricentro
G di un sistema di masse M, allora
(4.175) I
a
= I
g
+ m
_
d(a, g)
_
2
dove m `e la massa totale e d(a, g) `e la distanza delle due rette.
Dimostrazione. Si consideri la denizione (4.173) e si applichi la seconda delle formule
di tasposizione (4.174):
I
a
= I
O
(u) = I
G
(u) +m[OGu[
2
= I
g
+m
_
d(a, g)
_
2
. 2
Corollario 4.17.1 Al variare della retta a in un fascio di rette parallele il momento
dinerzia I
a
`e minimo quando a passa per il baricentro.
168 Capitolo 4. Meccanica newtoniana
Studiamo il comportamento del tensore e della forma dinerzia in un punto O al variare del
vettore v. Osserviamo innanzitutto dalla (4.171) che I
O
(v) 0. Si ha I
O
(v) = 0 se v = 0
oppure se OP
`e parallelo a v per ogni punto P
. In questultimo caso tutti i punti del
sistema materiale si trovano su di una retta passante per O e parallela a v. Chiamiamo
questo caso caso degenere. Se il sistema si riduce al punto O il tensore dinerzia in
O `e identicamente nullo. In conclusione: la forma dinerzia I
O
`e denita positiva, al di
fuori del caso degenere in cui `e semi-denita positiva. Di conseguenza il tensore dinerzia
I
O
ammette tre autovalori reali (I
1
, I
2
, I
3
): sono detti momenti principali dinerzia
relativi al punto O. Nel caso non degenere sono tutti e tre positivi, nel caso degenere
uno di essi `e nullo e gli altri due sono uguali fra loro (per ragioni di simmetria, come
sar` a chiarito fra poco). Le autodirezioni di I
O
, tra loro ortogonali, determinano tre rette
passanti per O, (a
1
, a
2
, a
3
) dette assi principali dinerzia relativi al punto O. Questi
assi sono univocamente determinati se e solo se i momenti principali dinerzia sono tutti
distinti. I momenti principali dinerzia e gli assi principali dinerzia relativi al baricentro
si chiamano rispettivamente momenti centrali dinerzia e assi centrali dinerzia.
Nota 4.17.2 I momenti principali dinerzia (I
1
, I
2
, I
3
) in un punto O sono i momen-
ti dinerzia relativi ai rispettivi assi principali (a
1
, a
2
, a
3
). Infatti, se per esempio u
1
`e
un autovettore unitario associato allautovalore I
1
, da I
O
(u
1
) = I
1
u
1
segue I
O
(u
1
) =
I
O
(u
1
) u
1
= I
1
u
1
u
1
= I
1
.
Come vedremo tra poco, la conoscenza degli assi principali dinerzia `e importante perche
consente notevoli semplicazioni nel calcolo dei momenti dinerzia. La loro determinazione
`e facilitata dalla seguente importante propriet` a di simmetria:
Teorema 4.17.2 Se `e un piano di simmetria materiale ortogonale del sistema
materiale M (cio`e se `e un piano di simmetria coniugato ad un versore ortogonale u)
allora, qualunque sia O , la retta per O ortogonale a `e asse principale dinerzia in
O.
Dimostrazione. Si prenda un versore u ortogonale al piano e si considerino due
punti materiali simmetrici: (P
1
, m
1
) e (P
2
, m
2
). Per denizione di simmetria materiale
ortogonale si ha m
1
= m
2
, P
1
P
2
parallelo ad u, e il punto medio di P
1
P
2
appartiene a :
allora, qualunque sia O , si ha [OP
1
[ = [OP
2
[ e OP
1
u = OP
2
u. Per il sistema
materiale costituito da questi due soli punti si ha di conseguenza:
I
O
(u) = m
1
_
[OP
1
[
2
u OP
1
u OP
1
_
+ m
2
_
[OP
2
[
2
u OP
2
u OP
2
_
= m
1
_
2 [OP
1
[
2
u +OP
1
u P
1
P
2
_
= m
1
_
2 [OP
1
[
2
OP
1
u [P
1
P
2
[
_
u = I u.
Ci` o mostra che u `e autovettore di I
O
. Invece per un sistema costituito da un solo punto
materiale (P, m) posto su , si ha semplicemente I
O
(u) = m[OP[
2
u, perche OP u = 0.
Anche in questo caso u `e autovettore. Ci` o basta a dimostrare il teorema in virt` u della
propriet` a additiva del tensore dinerzia (Nota ??). 2
4.17. Tensore dinerzia di un sistema di masse 169
Poiche gli assi principali dinerzia sono fra loro ortogonali, lenunciato del teorema pu` o
continuare con: . . . e gli altri due assi principali dinerzia giacciono su . La dimostra-
zione del teorema seguente, assai utile nelle applicazioni, `e lasciata come esercizio.
Teorema 4.17.3 Se un sistema materiale M ammette due piani di simmetria materiale
ortogonale fra loro ortogonali, allora gli assi principali dinerzia relativi ad un qualunque
punto O della loro retta dintersezione sono la retta intersezione stessa e le due rette
ortogonali per O giacenti sui due piani. Se i due piani di simmetria ortogonale non sono
fra loro ortogonali, allora la retta intersezione `e asse principale dinerzia per ogni suo
punto, gli altri due assi principali sono a questa ortogonali ma indeterminati ed i due
momenti dinerzia corrispondenti sono uguali.
Veniamo inne al calcolo delle componenti del tensore dinerzia. Si considerino un riferi-
mento ortonormale di origine il punto O, (O, c
) = (O, i, j, k) e le corrispondenti coordi-
nate (x
) = (x, y, z). Denotiamo con (x
) = (x
, y
, z
) le coordinate del punto P
. Tenuto
conto della denizione (4.169) e delle uguaglianze OP
= x
e [OP
[
2
=
3
=1
(x
)
2
,
posto
I
= I
O
(c
) c
,
si ottiene:
(4.176)
_
_
I
_
(x
+1
)
2
+ (x
+2
)
2
_
I
( ,= )
Nei testi classici la matrice simmetrica [I
] delle componenti della forma dinerzia, detta
matrice dinerzia, `e denotata con
(I
) =
_
_
A C
B A
C
_
_
,
cosicche le (4.176) diventano:
(4.177)
_
_
A =
(y
2
+ z
2
),
B =
(z
2
+x
2
),
C =
(x
2
+y
2
),
_
_
A
,
B
,
C
.
170 Capitolo 4. Meccanica newtoniana
Nota 4.17.3 Se gli assi coordinati sono assi principali dinerzia per il punto O, allora
la matrice metrica si deve diagonalizzare, quindi necessariamente
A
= B
= C
= 0
e (A, B, C) sono i momenti principali dinerzia.
Nota 4.17.4 Dalle prime tre equazioni (4.177) si traggono le disuguaglianze
A+B C, B +C A, C +A B.
Nota 4.17.5 La matrice dinerzia consente il calcolo del momento dinerzia rispetto ad
una qualunque retta a passante per O. Infatti dalla (4.173) e dalla (4.171) si trae
(4.178) I
a
= I
,
dove si sono denotati con (u
) le componenti di un versore u della retta a. Queste
componenti sono anche dette coseni direttori della retta a e sono classicamente denotati
con (, , ). Cosicche in notazioni classiche la (4.178) diventa:
(4.179) I
a
= A
2
+ B
2
+C
2
2
_
A
+B
+ C
_
.
Se gli assi sono assi principali dinerzia allora si ha pi` u semplicemente:
(4.180) I
a
= A
2
+ B
2
+ C
2
.
Nota 4.17.6 Ellissoide dinerzia. Si consideri la quadrica Q di centro O denita
dalle equazioni
(4.181) I
= 1,
ovvero dalle equazioni (se gli assi sono principali dinerzia):
(4.182) Ax
2
+ By
2
+C z
2
= 1.
Siccome la forma dinerzia `e denita positiva, almeno nel caso non degenere, questa qua-
drica `e un ellissoide, detto ellissoide dinerzia nel punto O, ed i suoi assi sono gli assi
principali dinerzia. Nel caso degenere, dove tutti i punti sono distribuiti su di una retta
passante per O, la quadrica Q denita dalla (4.182) `e un cilindro retto circolare aven-
te come asse la retta; infatti uno dei due momenti principali, quello relativo alla retta
materiale, si annulla e gli altri due sono uguali (si veda il Teorema 4.17.3 oppure si guar-
dino le (4.177)). In ogni caso, dal confronto della (4.181) con la (4.178) si osserva che
se P
a
`e il punto dintersezione della quadrica Q con la retta a passante per O, essendo
x
= [OP
a
[ u
, risulta:
(4.183) [OP
a
[ =
1
I
a
.
4.17. Tensore dinerzia di un sistema di masse 171
Nota 4.17.7 Sistemi materiali piani. Si consideri un sistema materiale piano:
tutti i punti materiali giacciono su di un piano . Questo piano `e ovviamente piano di
simmetria materiale ortogonale e quindi possiamo applicare il Teorema 4.17.3. Se C `e
il momento principale dinerzia rispetto allasse ortogonale al piano passante per un suo
qualunque punto O (che diventa asse z) allora
(4.184) C = A+ B
Per riconoscerlo basta utilizzare le (4.177), tenendo conto che z
= 0.
Nota 4.17.8 Sistemi materiali continui. Le denizioni di tensore dinerzia rispetto
ad un punto e di momento dinerzia rispetto ad una retta sono estendibili a un sistema
continuo di masse, secondo quanto gi` a osservato per il baricentro. Valgono le stesse pro-
priet` a viste per il caso di un sistema nito di punti. Per esempio, la denizione (4.168)
per un sistema continuo tridimensionale (D, ) diventa
(4.185) I
O
(v) =
_
D
(r v) r ,
dove r `e il vettore posizione rispetto ad O del generico punto P del sistema continuo, `e
la forma volume, `e la densit` a di massa. Cos` le (4.177) si trasformano in integrali tripli:
(4.186)
_
_
A =
_
D
J (y
2
+ z
2
) dq
1
dq
2
dq
3
,
B =
_
D
J (z
2
+ x
2
) dq
1
dq
2
dq
3
,
C =
_
D
J (x
2
+y
2
) dq
1
dq
2
dq
3
,
_
_
A
=
_
D
J y z dq
1
dq
2
dq
3
,
B
=
_
D
J z x dq
1
dq
2
dq
3
,
C
=
_
D
J x y dq
1
dq
2
dq
3
,
dove D
R
3
`e il dominio di integrazione nelle coordinate (q
i
) considerate, e J il corri-
spondente jacobiano.
Capitolo 5
Meccanica lagrangiana
_
Joseph-Louis Lagrange (Torino 1736 - Parigi 1813) pubblica nel 1788 la
Mecanique Analitique. Scrive nellavvertissement, con piena coscienza della
grandezza dellopera compiuta:
Si hanno gi` a diversi Trattati di Meccanica, ma il piano di questo `e interamente
nuovo. Mi sono proposto di ridurre la teoria di questa Scienza, e larte di risolvere i
problemi che ad essa sono riferiti, a delle formule generali, il cui semplice sviluppo
dia tutte le equazioni necessarie per la soluzione di ciascun problema. Spero che
la maniera con cui ho cercato di raggiungere questobiettivo, non lascier` a niente a
desiderare.
QuestOpera avr` a daltronde unaltra utilit` a; riunir` a e presenter` a sotto uno stesso
punto di vista, i dierenti Princ`pi trovati nora per facilitare la soluzione di que-
stioni di Meccanica, ne mostrer` a il legame e la mutua dipendenza, e consentir` a di
giudicare la loro esattezza e la loro portata.
[...] Non si troveranno gure in questOpera. I metodi che vi espongo non richiedo-
no ragionamenti geometrici o meccanici, ma solamente delle operazioni algebriche,
assogettate ad una marcia regolare e uniforme. Coloro che amano lAnalisi, ve-
dranno con piacere la Meccanica diventarne una nuova branca, e mi saranno grati
di averne cos` esteso il dominio.
Questo capitolo `e dedicato ad una trattazione moderna della Meccanica di Lagran-
ge che, in alternativa alla Meccanica di Newton e Euler, trasferisce lanalisi dei
sistemi meccanici dallo spazio ane tridimensionale euclideo alle loro variet` a del-
le congurazioni. I necessari strumenti di calcolo dierenziale sulle variet` a sono
introdotti nei primi quattro paragra.
172
5.1. Variet`a dierenziabili 173
5.1 Variet`a dierenziabili
La nozione di variet` a dierenziabile, fondamentale per la moderna Geometria Dieren-
ziale, sorge dalla necessit` a di operare con le tecniche del calcolo dierenziale ed integrale su
spazi di natura pi` u generale degli spazi ani e soltanto localmente identicabili con aperti
di R
n
.
Definizione 5.1.1 Sia Q un insieme, i cui elementi chiamiamo punti. Dicesi carta
di dimensione n su Q unapplicazione iniettiva
: U R
n
il cui dominio U `e un sottoinsieme di Q e la cui immagine (U) `e un aperto di R
n
. Le
n funzioni q
i
: U R (i = 1, . . . , n) tali che per ogni x U
(x) = (q
1
(x), . . . , q
n
(x))
prendono il nome di coordinate associate alla carta . Si dice anche che le (q
i
) formano
un sistema di coordinate sullinsieme Q. Denoteremo una generica carta con la coppia
(U, ) o con (U, q
i
).
Una carta consente di rappresentare il dominio U Q in un aperto di R
n
e quindi di ope-
rare su di questo con gli strumenti dellAnalisi. Va osservato che pur essendo le coordinate
(q
i
) denite come funzioni reali sopra U, esse possono anche assumere il ruolo di variabili
reali. Ad esempio, data una funzione reale f : Q R sopra Q e data una carta (U, q
i
),
risulta denita una funzione
f : (U) R
n
R tale che f(x) =
f(q
1
(x), . . . , q
n
(x)) per
ogni punto x U, cio`e tale che
f = f
1
. Diciamo che la funzione
f `e la funzione
rappresentatrice o la rappresentazione locale della funzione f secondo la carta o
secondo le coordinate (q
i
), funzione che per semplicit` a denoteremo con f(q
i
).
Definizione 5.1.2 Due carte di dimensione n,
1
: U
1
R
n
e
2
: U
2
R
n
, si dicono
C
k
-compatibili se U
1
U
2
= oppure se, quando U
1
U
2
,= , risultano vericate le due
condizioni seguenti:
(i) gli insiemi O
1
=
1
(U
1
U
2
) e O
2
=
2
(U
1
U
2
), immagini dellintersezione dei domini
secondo le due carte, sono entrambi aperti;
(ii) le funzioni di transizione
12
: O
1
O
2
e
21
: O
2
O
1
, denite da
12
=
2
1
1
e
21
=
1
1
2
, dove
1
e
2
sintendono ristrette allintersezione U
1
U
2
, sono di classe
C
k
.
Le funzioni di transizione sono applicazioni, una inversa dellaltra, tra due aperti O
1
e O
2
di R
n
rappresentate da funzioni del tipo
(5.1) q
i
2
=
i
12
(q
h
1
), q
i
1
=
i
21
(q
h
2
),
dove (q
i
1
) e (q
i
2
) sono le coordinate corrispondenti alle carte
1
e
2
. Le (5.1) esprimono
le trasformazioni di coordinate o il cambiamento di coordinate nel passaggio da
174 Capitolo 5. Meccanica lagrangiana
_
`
Figura 5.1: Carte compatibili.
una carta allaltra. Le funzioni reali
i
12
(q
h
1
) e
i
21
(q
h
2
) sono per denizione di classe C
k
,
ammettono cio`e derivate parziali continue almeno no allordine k. Nel caso in cui k 1,
per linvertibilit` a delle funzioni di transizione, le corrispondenti matrici Jacobiane
(5.2)
_
q
i
1
q
h
2
_
,
_
q
i
2
q
h
1
_
sono regolari e una inversa dellaltra.
Definizione 5.1.3 Un atlante su di un insieme Q `e un insieme di carte compatibili
A =
: U
R
n
; I I `e un insieme di indici i cui domini U
formano
un ricoprimento di Q. Un insieme Q dotato di un atlante prende il nome di variet` a
dierenziabile di dimensione n.
Nota 5.1.1 Un dato atlante pu` o essere ampliato con laggiunta di carte. Un atlante
si dice saturato (o massimale) se contiene tutte le possibili carte ad esso compatibili.
Per variet` a dierenziabile sintende, pi` u precisamente, un insieme dotato di un atlante
massimale.
Nota 5.1.2 Un atlante induce sullinsieme Q una topologia, quindi una variet` a dieren-
ziabile `e anche uno spazio topologico. Un sottoinsieme A Q `e per denizione un aperto
se per ogni carta (U
) linsieme
(AU
) R
n
`e un aperto (nella topologia di R
n
).
I sottoinsiemi aventi questa propriet` a soddisfano agli assiomi degli aperti. Infatti, poiche
ogni
`e iniettiva vale luguaglianza
(A
1
A
2
U
) =
(A
1
U
(A
2
U
). Quindi
se A
1
e A
2
sono aperti, anche la loro intersezione `e un aperto. Inoltre, per una qualunque
5.1. Variet`a dierenziabili 175
collezione di sottoinsiemi A
i
di Q vale lidentit` a
_
(
i
A
i
) U
_
=
i
_
A
i
U
_
,
quindi se questi sono aperti anche la loro unione `e un aperto. Inne linsieme Q `e un
aperto perche le immagini dei domini delle carte sono aperti per denizione.
Nota 5.1.3 Nella topologia indotta da un atlante i domini delle carte sono aperti e le
carte sono degli omeomorsmi. Per vericarlo occorre dimostrare che una carta : U
R
n
, che per denizione stabilisce una corrispondenza biunivoca tra il suo dominio e la sua
immagine, `e bicontinua cio`e che:
(i) se B (U) `e un aperto, allora linsieme A =
1
(B) `e un aperto,
(ii) se A U `e un aperto, allora (A) `e un aperto.
Dimostrazione.
(i) Oltre alla si consideri una qualunque altra carta compatibile
: U
R
n
con
A U
,= . La funzione di transizione : (U U
(U U
) `e per denizione
almeno C
0
, cio`e continua insieme allinversa, quindi `e un omeomorsmo. Daltra parte
(A U
) =
_
B (U U
)
_
dove B `e aperto per ipotesi e (U U
) `e aperto per
denizione di compatibilit` a. Dunque
(A U
) `e un aperto per ogni carta compatibile.
Ci` o dimostra che A `e un aperto.
(ii) Questa seconda propriet` a `e ovvia in base alla denzione di aperto: limmagine di
A secondo una qualunque carta `e un aperto e `e una di queste carte. Si noti bene
che, nella maggior parte dei testi di Geometria Dierenziale, una variet` a dierenziabile `e
denita come insieme Q dotato di una struttura topologica e di un atlante le cui carte
sono omeomorsmi di aperti di Q su aperti di R
n
.
Nota 5.1.4 La topologia indotta da un atlante pu` o non essere di Hausdor (cio`e
separabile: punti distinti ammettono intorni disgiunti) anche se ogni dominio di carta,
preso a se stante, `e omeomorfo ad un aperto di R
n
(si veda lEsempio 5.1.3 qui di seguito).
Qui e nel seguito (cos` come nella maggior parte dei testi di Geometria Dierenziale) per
variet` a dierenziabile sintender` a uninsieme dotato di un atlante la cui topologia indotta
`e separabile e a base numerabile.
Nota 5.1.5 La compatibilit` a `e un requisito essenziale richiesto alle carte sullo stesso
insieme Q anche, considerate nel loro complesso, possano fornire attraverso le parame-
trizzazioni locali una visione globale coerente (in particolare, come si `e visto, indurre
una topologia). Si osservi che un atlante di classe C
k
pu` o essere considerato come atlante
di classe C
h
con h < k. Si pu` o tuttavia dimostrare che una variet` a dierenziabile para-
compatta di classe C
k
con k 1 ammette un atlante di classe C
h
per ogni h > k. Dunque
una variet` a dierenziabile paracompatta di classe C
k
con k 1 (`e essenziale che non
sia solo k = 0, cio`e che la compatibilit` a tra le carte non sia solo continua) ammette una
struttura di variet` a dierenziabile di classe C
. Pertanto si supporr` a tacitamente che le
variet` a considerate siano di classe C
.
Esempio 5.1.1 Linsieme dei numeri reali R `e una variet` a di dimensione 1. Lidentit` a
R R `e una carta (detta carta naturale) che da sola costuituisce un atlante. Analo-
gamente, linsieme R
n
`e una variet` a di dimensione n e pi` u in generale gli spazi ani sono
variet` a.
176 Capitolo 5. Meccanica lagrangiana
Esempio 5.1.2 Uno stesso insieme pu` o possedere atlanti fra di loro non conpatibili
(anche se con la stessa topologia). Sullinsieme R la carta : R R: x x
3
non `e
compatibile con la carta naturale perche una delle due funzioni di transizione `e la radice
cubica che non `e derivabile nellorigine.
Esempio 5.1.3 Sia Q linsieme unione delle tre semirette A, B, C del piano R
2
denite
da (Figura 5.2):
A : y = 0, x < 0,
B : y = 1, x 0,
C : y = 1, x 0.
......................................................................................................................................................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
.........................................................................................................................................................................................................................................................
.... ... ... .. .. . .. .. . .
x
y
)
A
B
C
Figura 5.2: Esempio 5.1.3
Si considerino su Q le carte
1
: A B R,
2
: A C R,
ottenute restringendo la proiezione di R
2
sullasse x agli insiemi A B e A C. Queste
due carte sono compatibili perche le funzioni di transizione coincidono con lidentit` a sulla
semiretta aperta A, intersezione dei loro domini. Esse formano inoltre un atlante di Q,
perche i loro domini ricoprono Q. La topologia indotta non `e separabile perche i punti
estremi delle due semirette B e C, di coordinate (0, 1) e (0, 1), non ammettono intorni
disgiunti.
5.1.1 Sottovariet`a aperte
Ogni aperto Adi una variet` a dierenziabile Qpossiede a sua volta una naturale struttura di
variet` a dierenziabile (con la stessa dimensione). Si verica infatti che se A =
: U
R
n
; I `e un atlante di Q allora le restrizioni delle sue carte ad un aperto A Q
formano un atlante
[A: U
A R
n
; I di A.
5.1. Variet`a dierenziabili 177
_
`
Figura 5.3: Sottovariet` a.
5.1.2 Sottovariet`a
Una sottovariet` a S di una variet` a dierenziabile Q `e un sottoinsieme di Q tale che per
ogni punto p
0
S esiste una carta : U R
n
con dominio contenente p
0
, di coordinate
(q
i
) tali che
p S U q
k+1
(p) = 0, . . . , q
n
(p) = 0 (k < n),
cio`e tale che i punti di S che stanno nel dominio della carta sono caratterizzati dallannul-
larsi di n k coordinate. Una tale carta si dice carta adattata a S e le corrispondenti
coordinate si dicono adattate. Si pu` o dimostrare che la restrizione [S: U S R
k
`e
una carta di S di dimensione k e che linsieme delle carte adattate induce un atlante su
S. Si dimostra anche che la topologia indotta da questo atlante coincide con la topologia
indotta da Q a S.
5.1.3 Applicazioni dierenziabili
Unapplicazione : M N tra due variet` a dierenziabili M ed N (di dimensione m ed n
rispettivamente), assegnate due carte su M ed N di coordinate (x
i
) e (y
a
) rispettivamente
(i = 1, . . . , m, a = 1, . . . , n), `e rappresentabile da equazioni del tipo
y
a
=
a
(x
i
)
cio`e da n funzioni reali nelle m variabili reali (x
i
). Lapplicazione si dice di classe
C
k
, in particolare dierenziabile, se ogni sua rappresentazione in coordinate `e di classe
C
k
, in particolare C
. Si dice rango dellapplicazione in un punto di M il rango della
matrice mn delle derivate parziali
_
a
x
i
_
178 Capitolo 5. Meccanica lagrangiana
calcolate in quel punto. Si pu` o dimostrare che questo non dipende dalla scelta delle
coordinate. Le stesse denizioni si applicano al caso in cui N = R, cio`e al caso delle
funzioni reali sulle variet` a. Si dice che `e una immersione di M in N se m n e se
il rango di `e ovunque massimo ( = m). Se `e iniettiva allora si dice che limmagine
S = (M) `e una sottovariet` a immersa di M. Questo concetto `e pi` u generale di quello
del sottoparagrafo precedente perche la topologia di S indotta da M tramite pu` o essere
diversa dalla topologia indotta da N. Se le due topologie coincidono, cio`e se S `e una
sottovariet` a nel senso anzidetto, si dice che `e una immersione topologica. Si dice che
`e un dieomorsmo se `e invertibile e se ed
1
sono entrambe dierenziabili. Le
due variet` a M ed N si dicono allora dieomorfe e si usa scrivere M N. Esse hanno la
stessa dimensione.
5.1.4 Variet`a prodotto
Se M e N sono due variet` a dierenziabili, di dimensione m ed n rispettivamente, allora il
loro prodotto cartesiano M N `e una variet` a dierenziabile di dimensione m+ n, detta
variet` a prodotto. Si dimostra infatti che i prodotti cartesiani di carte delle due variet` a
deniscono carte su MN che sono fra loro compatibili e che quindi due atlanti di M ed
N generano un atlante di M N.
5.1.5 Superci regolari in uno spazio ane
Si consideri in R
m
il sottinsieme S costituito dai punti soddisfacenti a r < m equazioni
indipendenti
(5.3) F
a
(x
1
, . . . , x
m
) = 0 (a = 1, . . . , r).
Sintende con ci` o che i dierenziali delle funzioni F
a
sono indipendenti in ogni punto di
S, ovvero che in corrispondenza ai punti di S la matrice r m
(5.4)
_
F
a
x
_
( = 1, . . . , m)
ha rango massimo. Linsieme S `e allora una supercie regolare. Dimostriamo che `e
una sottovariet` a di R
m
e quindi essa stessa una variet` a. Dire che la matrice (5.4) ha
rango massimo in un punto di S equivale ad aermare che nellintorno di quel punto una
sua sottomatrice quadrata di ordine massimo r `e regolare. Si pu` o supporre, cambiando
eventualmente lordine delle coordinate, che questa sottomatrice sia composta dalle prime
r righe e prime r colonne:
det
_
F
a
x
b
_
,= 0 (a, b = 1, . . . , r).
Ci` o posto, si considerino le equazioni
_
q
a
= F
a
(x
1
, . . . , x
m
)
q
i
= x
i
,
a = 1, . . . , r; i = r + 1, . . . , m.
5.1. Variet`a dierenziabili 179
Queste deniscono nuove coordinate (q
a
, q
i
) in un certo intorno U del punto considerato,
perche il corrispondente jacobiano non `e nullo:
det
_
_
q
a
x
b
q
a
x
i
q
j
x
b
q
j
x
i
_
_
= det
_
_
F
a
x
b
F
a
x
i
0
j
i
_
_ = det
_
F
a
x
b
_
,= 0.
Poiche la supercie S `e nellintorno U caratterizzata dalle equazioni q
a
= 0, queste coor-
dinate sono adattate a S. Si `e cos` dimostrato che nellintorno di ogni punto di S esistono
carte adattate e quindi che S `e una sottovariet` a. Dimostrato che una supercie regolare
`e una variet` a, si pu` o anche dimostrare che una qualunque variet` a dierenziabile Q pu` o
essere immersa topologicamente in R
N
con N opportuno non superiore a 2 dim(Q) + 1
(teorema di immersione di Whitney, 1936) e quindi pu` o essere intesa come supercie
regolare in R
N
.
5.1.6 Sottovariet`a denite da equazioni
Quanto detto nellosservazione precedente si pu` o ripetere per un sistema di r funzioni
dierenziabili (F
a
) sopra una variet` a Q. Le equazioni F
a
= 0 deniscono un sottoinsieme
S Q. Se in ogni punto di S le (F
a
) sono indipendenti allora S `e una sottovariet` a di
codimensione r. Pi` u in generale, se le funzioni sono ovunque indipendenti le equazioni
F
a
= c
a
, al variare delle costanti c = (c
a
) R
r
, deniscono un fogliettamento sopra un
sottoinsieme A Q, cio`e una partizione in sottovariet` a disgiunte.
5.1.7 La circonferenza S
1
Si consideri linsieme S
1
R
2
denito da
S
1
= (x, y) R
2
[ x
2
+y
2
= 1.
Si tratta della circonferenza di raggio 1 centrata nellorigine. Questinsieme `e una curva
regolare (supercie regolare di dimensione 1) di R
2
e quindi variet` a dierenziabile. Tut-
tavia si pu` o riconoscere direttamente che `e una variet` a, costruendone delle carte e quindi
degli atlanti. Possiamo per esempio costruire una carta prendendo come dominio tutta
la circonferenza meno un punto A e considerare lapplicazione che ad ogni altro punto P
associa langolo compreso tra 0 e 2 (estremi esclusi) che separa P da A. Due carte di
questo tipo sono compatibili (perche i due angoli dieriscono per una costante) e formano
un atlante su S
1
. Un altro tipo di carta `e la proiezione stereograca rispetto ad un
punto N. Si prenda per esempio N = (0, 1). Ad ogni punto P del dominio U
N
= S
1
N
si fa corrispondere il punto P
intersezione della retta per O = (0, 0) ortogonale alla retta
ON (in questo caso lasse x) con la retta NP. Lapplicazione
N
: U
N
R che associa al
punto P = (x, y) lascissa del punto P
`e una carta. Usando la similitudine tra triangoli
si vede che
N
(x, y) =
x
1 y
.
180 Capitolo 5. Meccanica lagrangiana
_
`
.................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................. . . . . . . . . . . .
. . . . . . . . . . . .
....................................................................................................................................................................................................................................................................................................................................................... ...........
.. .. . .. . . . . .
x
y
................................................................................................................................................................................................................................................................................................
.....................................................................................................................................................................................................
........ ...... .... .... .. ... .. ... .. . .. .. .. . .. . .. . .. . . .. . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . .. . . .. . .. . .. . .. .. .. .. .. .. ... .. ... .... ..... ..........................................................................................................................................................................................................................................................................................................................................................
N
S
P
P
Figura 5.4: Proiezione stereograca della circonferenza.
Si noti che si ha sempre
N
,= 0, perche il punto (0, 1) `e escluso dal dominio della carta.
Due carte di questo tipo sono fra loro compatibili e deniscono un atlante. Si prenda per
esempio il punto S opposto ad N, nel nostro caso il punto S = (0, 1). La corrispondente
carta
S
, associa al punto P lascissa del punto corrispondente P
sullasse x. Risulta
quindi
S
(x, y) =
x
1 + y
.
Poiche (x, y) S
1
, risulta
N
S
= 1. Il cambiamento di coordinate `e allora rappresentato
dalla relazione
N
=
1
S
,
ovunque dierenziabile (perche
N
,= 0,
S
,= 0).
5.1.8 Le sfere S
n
Per ogni intero n consideriamo linsieme
S
n
= (x
) R
n+1
[
(x
)
2
= 1 R
n+1
Per n = 1 si ritrova la denizione di S
1
. Per n = 2 si ha la sfera (unitaria, bidimensionale)
S
2
= (x, y, z) R
3
[ x
2
+ y
2
+ z
2
= 1.
Ad ogni pressato punto N di S
2
corrisponde una proiezione stereograca
N
: U
N
R
2
che associa ad ogni punto P di U
N
= S
2
N il punto P
intersezione della la retta NP col
piano perpendicolare a ON passante per il centro O. Se per esempio N = (0, 0, 1) questo
piano `e il piano coordinato (x, y) e quindi
N
(x, y, z) =
_
x
1 z
,
y
1 z
_
.
5.1. Variet`a dierenziabili 181
Una proiezione stereograca `e una carta. Si dimostra che due proiezioni stereograche
sono compatibili. Due proiezioni stereograche corrispondenti a punti opposti della sfera
formano un atlante. In maniera analoga si costruiscono le proiezioni stereograche su ogni
S
n
.
5.1.9 I tori T
n
Si consideri sulla retta reale R la relazione di equivalenza x x
x x
Z (due
numeri sono equivalenti se dieriscono per un numero intero). Linsieme delle classi di
equivalenza `e il quoziente di R rispetto a Z e si denota con T
1
= R/Z. Fissato un
numero a si consideri lintervallo aperto unitario I
a
= (a, a + 1). Lapplicazione identica
I
a
R genera unapplicazione
a
: U
a
R sopra linsieme U
a
delle classi di equivalenza
rappresentate dai punti di I
a
ponendo
a
([x]) = x per ogni x I
a
(si noti che U
a
=
T
1
[a]). Questa `e una carta. Due carte di questo tipo sono compatibili, perche le
funzioni di transizione si riducono allidentit` a, e formano un atlante. Dunque T
1
`e una
variet` a dierenziabile, di dimensione 1. Si noti che T
1
pu` o considerarsi rappresentato
dallintervallo chiuso [0, 1] dove per` o gli estremi vanno identicati. Questidenticazione
rende questintervallo, quindi T
1
, omeomorfo ad una circonferenza. Per precisare questa
corrispondenza si consideri lapplicazione : T
1
S
1
che ad ogni classe [t] associa il punto
di S
1
determinato dallangolo 2t (misurato in un certo senso, per esempio antiorario, a
partire da un certo punto, per esempio (1, 0)). Si tratta di unapplicazione biunivoca.
Se si prende su T
1
la carta
0
, il cui dominio `e U
0
= [I
0
], si vede che lapplicazione
`e denita da ([t]) = 2t con 0 < t < 1. Lapplicazione `e dunque invertibile e
dierenziabile insieme alla sua inversa, quindi un dieomorsmo. Le due variet` a S
1
e
T
1
sono pertanto dieomorfe. In maniera analoga a quanto visto per T
1
si dimostra che
linsieme T
n
= R
n
/Z
n
, dato dalle classi di equivalenza dei punti di R
n
le cui coordinate
dieriscono per dei numeri interi, `e una variet` a dierenziabile detta toro di dimensione
n. Si dimostra che T
n
`e dieomorfo al prodotto cartesiano S
n
1
= S
1
. . . S
1
, n volte.
Si osservi che il toro T
2
pu` o essere rappresentato in un quadrato, per esempio il quadrato
unitario (x, y) R
2
[ 0 x 1, 0 y 1, dove i lati opposti vengono identicati.
5.1.10 Gruppi di matrici, gruppi ortogonali
Si denota con GL(n, R) il gruppo delle matrici quadrate (A
j
i
) di ordine n di numeri reali
a determinante non nullo (gruppo lineare generale di ordine n sui reali). Le matrici
reali di ordine n formano lo spazio R
n
2
. Le matrici il cui determinante `e nullo formano
una supercie regolare S dello spazio R
n
2
, denita appunto dallequazione
det[A
j
i
] = 0.
Essendo una supercie, linsieme S `e chiuso e quindi linsieme complementare GL(n, R) =
R
n
2
S `e un aperto di R
n
2
, quindi una variet` a dierenziabile (di dimensione n
2
).
182 Capitolo 5. Meccanica lagrangiana
_
`
........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
.............................................................................................................................................................................................................................................................................................. ...............
.. ... ... .. . .. .. .
..................................................................
......
......
......
......
......
......
......
...... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
......
......
......
......
......
......
......
......
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.......................................................... ........................................................
.......................................................... ............................ . .......................................................................
....................................................................................................
x
y
1
1
0
Figura 5.5: Una carta sul toro bidimensionale T
2
=
R
2
/Z
2
.
Si consideri il sottogruppo O(n) delle matrici ortogonali, caratterizzate dalle equazioni
n
i=1
A
i
h
A
i
k
=
hk
.
Queste equivalgono alle
1
2
n(n + 1) equazioni
F
(h,k)
(A
i
j
)
n
i=1
A
i
h
A
i
k
hk
= 0, h k
nelle R
n
2
variabili A
i
j
. Si pu` o dimostrare che queste equazioni sono indipendenti (occorre
studiare il rango della matrice delle derivate delle funzioni F
(h,k)
rispetto alle variabili
A
i
j
e mostrare che `e massimo). Dunque O(n) `e una supercie regolare di R
n
2
di dimen-
sione
1
2
n(n 1) (= n
2
1
2
n(n + 1)) quindi una variet` a dierenziabile. Si tratta di una
variet` a sconnessa. La componente connessa che contiene la matrice unitaria, composta
dalle matrici ortogonali a determinante uguale a 1, `e un sottogruppo denotato con SO(n).
`e interessante e complesso il problema della rappresentazione parametrica di tali matrici,
cio`e la costruzione di carte di queste variet` a (per esempio gli angoli di Euler sono coordi-
nate di una carta di SO(3); un altro sistema di coordinate `e dato dalle componenti delle
matrici antisimmetriche 3 3 nella rappresentazione esponenziale delle rotazioni). Questi
esempi rientrano in una particolare ma importante classe di variet` a: i gruppi di Lie.
1
Un
gruppo di Lie `e un gruppo G dotato di una struttura di variet` a dierenziabile tale che
le applicazioni G G G: (g, h) gh (prodotto) e G G: g g
1
(inversione) sono
di classe C
.
1
Marius Sophus Lie, 1842-1899.
5.2. Fibrati tangenti 183
5.2 Fibrati tangenti
La nozione di spazio ane si basa essenzialmente su quella di spazio vettoriale, che invece
non `e coinvolta nella denizione di variet` a dierenziabile. Per poter estendere alle variet` a
il calcolo vettoriale occorre denire su queste la nozione di vettore.
Sia Q una variet` a dierenziabile di dimensione n. Come si `e detto, una funzione reale
(o campo scalare) di classe C
k
su Q `e unapplicazione f : Q R tale che ogni sua
rappresentazione locale f(x
i
) `e di classe C
k
. Si denota con C
k
(Q, R) linsieme di tali
funzioni. Su di esso sono denite le operazioni di somma e di prodotto che gli conferiscono
la struttura di anello commutativo e di spazio vettoriale reale (di dimensione innita).
Denotiamo pi` u brevemente con F(Q) linsieme C
(Q, R) delle funzioni reali di classe
C
. In particolare, per ogni punto q Q, denotiamo con F
q
(Q) linsieme delle funzioni
C
denite in un aperto contenente q.
Unapplicazione : I Q da un intervallo reale I R ad una variet` a Q prende il nome
di curva su Q. In un qualunque sistema di coordinate (q
i
) una curva `e rappresentata
da equazioni parametriche del tipo
q
i
=
i
(t) (i = 1, . . . , n),
con t variabile in un opportuno sottointervallo di I. Si conviene che gli intervalli di
denizione delle curve contengano lo zero. Una curva si dice basata in un punto q Q se
(0) = q. Il punto q prende anche il nome di punto base o punto iniziale della curva.
Una curva si dice di classe C
k
se tali sono le sue rappresentazioni parametriche.
Siamo ora in grado di dare tre denizioni equivalenti di vettore.
Definizione 5.2.1 Un vettore tangente in un punto q ad una variet` a Q `e una classe
di equivalenza di curve su Q basate in q. Due curve e
si dicono equivalenti o
tangenti se
(5.5)
_
_
_
(0) =
(0) (hanno lo stesso punto base),
D(f )(0) = D(f
)(0), f F(Q).
Si denota con [] la classe di equivalenza individuata dalla curva .
In questa denizione D denota loperazione di derivazione di funzione reale a variabile
reale.
Definizione 5.2.2 Un vettore tangente in un punto q ad una variet` a Q `e una
derivazione sulle funzioni, cio`e unapplicazione v: F
q
(Q) R tale che
(5.6)
_
_
_
v(af +bg) = a v(f) +b v(g), a, b R, f, g F
q
(Q),
v(fg) = v(f) g(q) + v(g) f(q).
184 Capitolo 5. Meccanica lagrangiana
La prima condizione mostra che v `e R-lineare. La seconda `e la regola di Leibniz. Il
numero v(f) sar` a anche denotato con
v, df)
e chiamato derivata della funzione f rispetto al vettore v.
Definizione 5.2.3 Un vettore tangente in un punto q ad una variet` a Q `e una classe
di equivalenza di coordinate e componenti cio`e di coppie
(q
i
, v
i
)
costituite da un sistema di coordinate (q
i
) in un intorno di q e da una n-pla di numeri
reali (v
i
). Due coppie si dicono equivalenti se
(5.7) v
i
= v
i
_
q
i
q
i
_
q
.
I numeri (v
i
) si dicono componenti del vettore secondo le coordinate (q
i
).
Se [] `e una classe di curve equivalenti in un punto q Q, cio`e un vettore tangente secondo
la Def. 5.2.1, si denisce una derivazione v, cio`e un vettore secondo la Def. 5.2.1, ponendo
(5.8) v(f) = D(f )(0).
In virt` u della stessa denizione di equivalenza (5.5)
2
questa denizione non dipende dalla
curva rappresentatrice della classe. Che le propriet` a (5.6) siano vericate segue dal fatto
che, introdotte coordinate generiche nellintorno del punto q, si ha
D(f ) =
f
q
i
dq
i
dt
,
dove `e sottintesa la sostituzione delle equazioni parametriche q
i
=
i
(t) della curva . Per
cui, posto
(5.9) v
i
= D
i
(0),
la (5.8) equivale a
v(f) = v
i
_
f
q
i
_
q
e le propriet` a (5.6) discendono dalle analoghe propriet` a delle derivate parziali. Se si usa
un diverso sistema di coordinate (q
i
), avendosi
dq
i
dt
=
q
i
q
i
dq
i
dt
,
si riconosce che tra le componenti (v
i
) denite dalla (5.6) e le analoghe (v
i
) corrispondenti
alle coordinate (q
i
) sussiste il legame (5.7). La (5.8) stabilisce dunque il passaggio dalla
5.2. Fibrati tangenti 185
Def. 5.2.1 alla Def. 5.2.3. Se inoltre v `e un vettore secondo la Def. 5.2.2 allora le sue
componenti secondo la Def. 5.2.3 sono denite da
(5.10) v
i
= v(q
i
) = v, dq
i
),
osservato che le coordinate sono particolari funzioni nellintorno del punto q. Se v =
[(q
i
, v
i
)] `e un vettore secondo la Def. 5.2.3 allora una curva tale che v = [] secondo la
Def. 5.2.1 ha equazioni parametriche
(5.11) q
i
= v
i
t +q
i
0
,
dove (q
i
0
) sono le coordinate del punto base q.
Nota 5.2.1 Lattributo tangente dato ai vettori cos` deniti richiama la circostanza che,
nel caso in cui Q sia una supercie regolare di un opportuno R
N
, questi si identicano
proprio coi vettori tangenti alla supercie. La nozione di vettore tangente ad una variet` a
si riduce, nel caso in cui questa sia uno spazio ane, alla nozione di vettore applicato. Per
questo motivo, al posto di vettore tangente si pu` o usare il termine vettore applicato in
q.
Denotiamo con T
q
Q linsieme dei vettori tangenti a Q nel punto q Q. Usando la
Denizione 5.2.3 si riconosce che esso ha una naturale struttura di spazio vettoriale reale
di dimensione n. Lo chiamiamo pertanto spazio tangente a Q in q.
Denotiamo con TQ linsieme di tutti i vettori tangenti alla variet` a Q. Esso ha una naturale
struttura di variet` a dierenziabile di dimensione 2n che chiamiamo variet` a tangente o
brato tangente di Q. Infatti ad ogni carta (U, q
i
) su Q corrisponde una carta (TU, q
i
, v
i
)
su TQ, il cui dominio TU `e linsieme di tutti i vettori tangenti nei punti di U: ad ogni v
TU le (q
i
) associano le coordinate del suo punto di applicazione mentre le (v
i
) associano
le sue componenti secondo queste coordinate. Due carte siatte sono fra loro compatibili.
Infatti se (U, q
i
) e (U
, q
i
) sono due carte di Q con U U
,= allora valgono le (5.7), le
quali rappresentano le funzioni di transizione dalla seconda alla prima carta. Le funzioni
a secondo membro sono di classe C
sia nelle coordinate (q
i
) (perche le due carte sono
supposte compatibili) sia nelle velocit` a lagrangiane (v
i
) (sono addirittura lineari in queste
variabili). Lo stesso dicasi per i legami inversi, del tutto analoghi. Dunque i cambiamenti
di coordinate (q
i
, v
i
) (q
i
, v
i
) sopra TU TU
sono di classe C
e le due carte sono
compatibili. Partendo da un atlante di Q, con carte di questo tipo si costruisce un atlante
su TQ. Dunque TQ `e una variet` a dierenziabile di dimensione 2n.
Le coordinate (q
i
, v
i
) su TQ corrispondenti a coordinate (q
i
) su Q considerate nel ragio-
namento precedente si dicono coordinate naturali di TQ. Per queste coordinate nel
seguito useremo anche la notazione (q
i
, q
i
) oppure (q
i
, q
i
).
Lapplicazione
Q
: TQ Q che ad ogni vettore tangente associa il punto di Q a cui `e
applicato si chiama brazione tangente di Q. Una bra di TQ `e dunque uno spazio
tangente T
q
Q.
186 Capitolo 5. Meccanica lagrangiana
5.3 Campi vettoriali su variet`a
Partendo dalla nozione di vettore tangente `e possibile denire sulle variet` a dierenziabili,
analogamente a quanto fatto per gli spazi ani (Cap. 1), le nozioni di campo vettoriale e
di forma dierenziale.
Un campo vettoriale (di classe C
k
) su di una variet` a dierenziabile Q pu` o essere inteso:
(i) Come applicazione (di classe C
k
) X: Q TQ che associa ad ogni punto q Q un
vettore X(q) T
q
Q (cio`e un vettore applicato in q). Se (q
i
, q
i
) sono coordinate naturali
su TQ, lapplicazione X: Q TQ `e rappresentata da equazioni parametriche del tipo
2
(5.12) q
i
= X
i
(q
).
Le funzioni X
i
(di classe C
k
) sono dette le componenti del campo vettoriale.
(ii) Come operatore di derivazione sulle funzioni reali, cio`e come applicazione
X: F(Q) F(Q) : f X(f)
R-lineare e soddisfacente alla regola di Leibniz:
X(a f +b g) = a X(f) +b X(g) (a, b R),
X(fg) = X(f) g + f X(g).
In questo caso il campo vettoriale si rappresenta in un qualunque sistema di coordinate
(q
i
) con loperatore
(5.13) X = X
i
q
i
.
Si user` a di solito la notazione X, df), al posto di X(f), per indicare la derivata della
funzione f secondo il campo vettoriale X. Pertanto:
(5.14) X, df) = X
i
f
q
i
.
Nota 5.3.1 Le derivate parziali
i
=
q
i
sono operatori lineari soddisfacenti alla re-
gola di Leibniz e pertanto possono intendersi come campi vettoriali sul dominio U delle
coordinate (q
i
). Questi n campi vettoriali sono indipendenti e formano il cosiddetto ri-
ferimento naturale associato alle coordinate (q
i
). La scrittura (5.13) esprime allora la
rappresentazione di un campo vettoriale X secondo il riferimento naturale associato a
delle coordinate (q
i
). Le componenti di X coincidono con le derivate delle coordinate:
(5.15) X
i
= X, dq
i
).
2
Adottiamo la notazione f(q
) per indicare una funzione delle n variabili q
i
.
5.3. Campi vettoriali su variet`a 187
Denotiamo con X
k
(Q) linsieme dei campi vettoriali di classe C
k
(con X(Q) se di classe
C
): `e uno spazio vettoriale reale di dimensione innita ovvero un modulo su C
k
(Q, R).
Nel seguito sottintenderemo di classe C
tutti i campi vettoriali considerati.
Come per gli spazi ani, un campo vettoriale pu` o essere inteso come sistema dinamico,
cio`e come generatore di curve integrali e ussi.
Definizione 5.3.1 d:cvsv1 Ad ogni curva : I Q sopra Q si associa una curva
: I TQ sopra il brato tangente TQ, detta curva derivata o curva tangente che ad
ogni t I fa corrispondere il vettore tangente alla curva. Il vettore (t), come derivazione,
`e denito dalluguaglianza
(5.16) (t), df) = D(f )(t).
Se in un sistema di coordinate (q
i
) su Q la curva ha equazioni parametriche q
i
=
i
(t),
allora la curva derivata ha equazioni parametriche
(5.17)
_
q
i
=
i
(t),
q
i
= D
i
(t),
dove D
i
(t) sono le derivate delle funzioni
i
(t) e (q
i
, q
i
) le coordinate naturali su TQ
corrispondenti alle coordinate (q
i
) su Q. Una curva : I Q si dice curva integrale di
un campo vettoriale X se per ogni t I il valore del campo X nel punto (t) `e uguale al
vettore tangente (t), cio`e se
(5.18) = X .
Le equazioni parametriche di una curva integrale soddisfano pertanto, in un qualunque
sistema di coordinate, al sistema di n equazioni dierenziali del primo ordine in forma
normale
(5.19)
dq
i
dt
= X
i
(q
j
),
dove ai secondi membri compaiono le componenti del campo, funzioni delle coordinate
(q
j
). La curva integrale si dice basata nel punto q
0
Q se (0) = q
0
. Valgono allora
tutte le considerazioni svolte al Cap. 1, 1.6, sullesistenza ed unicit` a delle curve integrali
massimali e sui ussi. Se tutte le curve integrali massimali sono denite su tutto lasse
reale R allora il campo si dice completo. In questo caso `e denito il usso del campo
X, cio`e unapplicazione dierenziabile
(5.20) : R Q Q: (t, q) (t, q)
tale che
(5.21)
q
(t) = (t, q)
188 Capitolo 5. Meccanica lagrangiana
`e la curva integrale massimale basata in q e tale inoltre che le applicazioni
(5.22)
t
: Q Q: q (t, q)
sono per ogni t R dei dieomorsmi su Q (cio`e delle trasformazioni su Q) soddisfacenti
alla propriet` a di gruppo
(5.23)
t
s
=
t+s
,
e di conseguenza alle propriet` a
(5.24)
t
s
=
s
t
,
0
= id
Q
, (
t
)
1
=
t
.
Linsieme delle trasformazioni
t
; t R `e allora un gruppo commutativo. Se il campo
non `e completo, esso genera solo dei ussi locali.
Una funzione F : Q R `e detta integrale primo o funzione integrale di X se `e costan-
te lungo tutte le curve integrali di X. Gli integrali primi sono caratterizzati dallequazione
alle derivate parziali
(5.25) X, df) = X
i
f
q
i
= 0.
Nota 5.3.2 La struttura topologica della variet` a pu` o avere delle conseguenze notevoli
sul comportamento globale delle funzioni, dei campi vettoriali, delle loro curve integrali e
degli integrali primi. Vediamone alcuni esempi. (i) Si pu` o dimostrare che su di una variet` a
compatta (per esempio su di una sfera, su di un toro) ogni campo vettoriale `e completo.
(ii) Si pu` o dimostrare che le sfere di dimensione dispari hanno almeno un campo vettoriale
C
senza punti singolari e che invece sulle sfere di dimensione pari un tale campo non
esiste (ogni campo ha almeno un punto singolare). (iii) Il brato tangente TQ non `e in
generale dieomorfo al prodotto R
n
Q. Se lo `e si dice che la variet` a Q`e parallelizzabile.
La parallelizzabilit` a equivale allesistenza di n campi vettoriali indipendenti in ogni punto.
Si pu` o dimostrare che le sfere S
1
, S
3
e S
7
sono le sole sfere parallelizzabili. Ogni toro T
n
`e parallelizzabile, perche potenza di S
1
. Ogni gruppo di Lie `e parallelizzabile.
Nota 5.3.3 Parentesi di Lie. Dati due campi vettoriali X e Y su Q, si verica che la
doppia derivazione X
_
Y (f)
_
, pur essendo lineare su f, non soddisfa alla regola di Leibniz
e quindi non `e una derivazione. Lo `e invece loperazione
(5.26) [X, Y ](f) = X
_
Y (f)
_
Y
_
X(f)
_
,
che pertanto denisce un campo vettoriale Z = [X, Y ]. Le componenti di questo campo
si ottengono applicando la (5.15):
(5.27) Z
i
= X
j
j
Y
i
Y
j
j
X
i
.
Sullo spazio X(Q) dei campi vettoriali `e pertanto denita unoperazione binaria interna
[, ], detta parentesi di Lie o commutatore, antisimmetrica, bilineare e soddisfacente
5.4. Forme dierenziali su variet`a 189
allidentit` a di Jacobi:
(5.28)
[X, Y ] = [Y , X],
[a X +b Y , Z] = a [X, Z] + b [Y , Z] (a, b R),
_
X, [Y , Z]
+
_
Y , [Z, X]
+
_
Z, [X, Y ]
= 0.
Se [X, Y ] = 0 si dice che i due campi commutano. Si pu` o infatti dimostrare (fatto
notevole) che: i ussi e di due campi vettoriali X e Y commutano, cio`e
t
s
=
s
t
per ogni s e ogni t, se e solo se [X, Y ] = 0. Il signicato di questa propriet` a `e il seguente.
A partire da un punto q
0
, seguendo per un tempo t la curva integrale di X e poi, dal
punto cos` raggiunto, per un tempo s la curva integrale di Y , si giunge ad un punto q
ts
.
Seguendo invece prima per un tempo s la curva integrale di Y e poi per un tempo t la
curva integrale di X si giunge ad un punto q
st
in generale diverso dal precedente. Nel
caso considerato invece i due punti coincidono sempre, qualunque sia il punto iniziale q
0
e
qualunque siano i tempi t e s, purche ammissibili.
5.4 Forme dierenziali su variet`a
Analogamente a quanto fatto al paragrafo 1.7 per gli spazi ani, si introduce la nozione
di forma dierenziale lineare o 1-forma su di una variet` a Q: `e unapplicazione lineare
da campi vettoriali a campi scalari, : X(Q) F(Q). Una 1-forma associa quindi ad
ogni campo vettoriale X su Q una funzione reale (X) su Q,
3
in maniera tale che
(f X +g Y ) = f (X) + g (Y ),
per ogni coppia di campi vettoriali (X, Y ) e di funzioni (f, g). Denoteremo di solito la
funzione (X) con X, ), utilizzando il simbolo di valutazione , ) tra campi vettoriali
e 1-forme. Una 1-forma opera anche su vettori tangenti, associando ad ognuno di questi
un numero reale, denotato con v, ).
Un esempio fondamentale di 1-forma `e il dierenziale di una funzione. Richiamata
infatti la denizione di derivata X, df) di una funzione f rispetto ad un campo vettoriale
X formula (??) si osserva che mantenendo ssa la funzione e facendo variare il campo
si ottiene unapplicazione lineare da campi a funzioni:
(5.29) df : X(Q) F(Q) : X X(f) = X, df).
La prima delle (??) mostra in particolare che i dierenziali dq
i
delle coordinate sono delle
1-forme che associano ad ogni campo vettoriale X le rispettive componenti X
i
:
(5.30) X, dq
i
) = X
i
3
Per semplicit`a supporremo campi vettoriali e forme dierenziali di classe C
.
190 Capitolo 5. Meccanica lagrangiana
Questa propriet` a consente di rappresentare ogni 1-forma , nel dominio delle coordinate,
come combinazione lineare dei dierenziali delle coordinate:
(5.31) =
i
dq
i
dove i coecienti
i
(funzioni delle coordinate), dette componenti della 1-forma, sono a
loro volta denite dalle uguaglianze
(5.32)
i
=
i
, )
sono cio`e il risultato della valutazione di sui campi vettoriali
i
del riferimento associato
alle coordinate stesse. Infatti, posto che X = X
i
i
, assunta la (5.32) come denizione e
tenuto conto della (5.30) si ha successivamente:
X, ) = X
i
i
, ) = X
i
i
= X, dq
i
)
i
= X,
i
dq
i
),
per cui vale la (5.31). Di qui si osserva inoltre che per la valutazione tra campi vettoriali
e 1-forme sussiste la rappresentazione
(5.33) X, ) = X
i
i
Le formule (5.31) e (5.32) forniscono la rappresentazione locale (in un qualunque
sistema di coordinate) di una generica 1-forma.
Confrontando la (5.31) qui sopra con la (??) si deduce in particolare che le componenti
della 1-forma df sono le derivate parziali di f:
(5.34) df =
i
f dq
i
`
E di una certa importanza, in varie situazioni, poter stabilire se una data 1-forma
`e il dierenziale di una funzione f, = df, cio`e se `e una forma esatta. Per poter
stabilire un tale criterio di esattezza occorre procedere allestensione del concetto di
forma dierenziale.
Definizione 5.4.1 Una forma dierenziale di grado p o p-forma sopra una variet` a
dierenziabile Q `e unapplicazione multilineare antisimmetrica
(5.35) : X(Q) X(Q) . . . X(Q)
. .
p volte
F(Q).
Una p-forma opera pertanto su p campi vettoriali (X
1
, X
2
, . . . , X
p
) producendo una
funzione (X
1
, X
2
, . . . , X
p
) : Q R. Questoperazione `e multilineare, cio`e lineare ri-
spetto ad ognuno dei p argomenti di . Ci` o signica che se si tengono ssi p 1 campi
vettoriali e si lascia variare il rimanente si ottiene una forma lineare. Inoltre la funzione
5.4. Forme dierenziali su variet`a 191
(X
1
, X
2
, . . . , X
p
) `e antisimmetrica negli argomenti. La denizione di antisimmetria pu` o
essere data in tre modi equivalenti:
(i) Unapplicazione del tipo (5.35) `e antisimmetrica se cambia di segno scambiando fra
loro due argomenti. Nel caso p = 2 ci` o equivale a
(5.36) (X, Y ) = (Y , X).
(ii) Unapplicazione del tipo (5.35) `e antisimmetrica se applicando una permutazione ai
suoi argomenti, il risultato resta invariato o cambia di segno a seconda che la permutazione
sia pari o dispari (sia cio`e la composizione di un numero pari o dispari di scambi).
(iii) Se `e multilineare (come nel nostro caso) allora `e antisimmetrica se si annulla quando
due argomenti coincidono (o, pi` u in generale, quando gli argomenti sono linearmente
dipendenti). Nel caso p = 2 ci` o equivale a
4
(5.37) (X, X) = 0.
Una p-forma pu` o moltiplicarsi per un numero reale o una funzione. Due p-forme (dello
stesso grado p) possono sommarsi. Denotiamo con
p
(Q) lo spazio delle p-forme sopra
Q. Si tratta di uno spazio vettoriale reale a dimensione innita. Per p = 0 si pone per
denizione
0
(Q) = F(Q) (una zero-forma `e una funzione). Per p = 1 ci si riduce alle
forme dierenziali lineari considerate sopra. Si ha
p
(Q) = 0 quando p > n: ogni p-forma
`e la forma nulla se p > n = dim(Q) (perch`e in ogni punto di Q i suoi argomenti sono
necessariamente vettori linearmente dipendenti). La teoria delle forme dierenziali si basa
sulle operazioni di prodotto esterno e di dierenziale d. Ne esaminiamo gli elementi
che saranno utilizzati nel seguito.
5.4.1 2-forme
Come dalla Def. 1, una 2-forma su Q `e unapplicazione bilineare antisimmetrica
: X(Q) X(Q) F(Q) : (X, Y ) (X, Y ).
Ogni 2-forma ammette una rappresentazione locale del tipo
(5.38) =
1
2
ij
dq
i
dq
j
con
ij
= (
i
,
j
)
dove le 2-forme dq
i
dq
j
operano sui campi vettoriali alla maniera seguente:
(5.39) dq
i
dq
j
(X, Y ) = X
i
Y
j
X
j
Y
i
.
Le componenti
ij
sono antisimmetriche negli indici,
(5.40)
ij
=
ji
4
Per esempio, `e ovvio che la (5.36) implica la (5.37). Viceversa, se vale la (5.37) allora per la bilinearit`a si ha
succesivamente: 0 = (X+Y , X+Y ) = (X, X)+(X, Y )+(Y , X)+(Y , Y ) = (X, Y )+(Y , X)
e quindi la (5.36).
192 Capitolo 5. Meccanica lagrangiana
e di conseguenza
(5.41) (X, Y ) =
ij
X
i
Y
j
.
Infatti, accettate le denizioni (5.38)
2
e (5.39) e osservato che lantisimmetria (5.40) segue
direttamente dalla (5.38)
2
, si ha successivamente
(X, Y ) = X
i
Y
j
(
i
,
j
) = X
i
Y
j
ij
=
1
2
_
X
i
Y
j
ij
+ X
j
Y
i
ji
_
=
1
2
_
X
i
Y
j
X
j
Y
i
_
ij
=
1
2
ij
dq
i
dq
j
(X, Y ),
da cui segue la (5.38)
1
.
5.4.2 Prodotto tensoriale e prodotto esterno di 1-forme
Date due 1-forme e il loro prodotto tensoriale `e la forma bilineare su X(Q)
denita da
(5.42) (X, Y ) = X, ) Y , ).
La prima forma valuta il primo vettore, la seconda forma valuta il secondo vettore e le
funzioni risultanti si moltiplicano. Il loro prodotto esterno `e la 2-forma denita da
(5.43) =
che opera quindi sui campi vettoriali alla maniera seguente:
(5.44) ( )(X, Y ) = X, )Y , ) X, )Y , )
Il prodotto esterno fra due 1-forme `e quindi bilineare e anticommutativo,
(5.45) = ,
ed in particolare tale che
(5.46) = 0.
Dalla (5.44) applicata al caso particolare dq
i
dq
j
si ricava la (5.39).
5.4.3 Dierenziale di 1-forme
Data una 1-forma se ne consideri una sua rappresentazione locale =
i
dq
i
in un generico
sistema di coordinate (q
i
). Il dierenziale d `e la 2-forma denita da
(5.47) d = d
i
dq
i
5.4. Forme dierenziali su variet`a 193
Dimostriamo che questa denizione non dipende dalla scelta delle coordinate. Per far
questo si consideri un secondo sistema di coordinate (q
i
). Considerata la matrice jacobiana
della trasformazione di coordinate
J
i
i
=
q
i
q
i
,
dalluguaglianza
dq
i
=
q
i
q
i
dq
i
segue il legame tra le componenti della 1-forma:
i
= J
i
i
i
.
Si ha allora:
d
i
dq
i
= d(J
i
i
i
) dq
i
= d
i
J
i
i
dq
i
+
i
j
J
i
i
dq
j
dq
i
.
Tuttavia, osservato che J
i
i
dq
i
= dq
i
e che
j
J
i
i
`e simmetrico rispetto agli indici (i, j)
(perche `e la derivata seconda rispetto a q
i
e q
j
di q
i
) mentre il termine dq
i
dq
j
`e
antisimmetrico, il secondo termine si annulla e si ha semplicemente
d
i
dq
i
= d
i
dq
i
.
Pertanto la denizione di d `e formalmente la stessa qualunque sia il sistema di coordinate
scelto. Ci` o stabilito, va osservato che il termine d
i
`e il dierenziale di una funzione ed `e
quindi esprimibile attraverso le sue derivate parziali:
d
i
=
j
i
dq
j
.
Pertanto la (5.47) si traduce nella formula
(5.48) d =
j
i
dq
j
dq
i
Siccome la (5.48) pu` o anche scriversi, per lantisimmetria di dq
i
dq
j
,
d =
1
2
(
j
i
i
j
) dq
j
dq
i
segue che le componenti di d sono
(5.49) (d)
ij
=
i
j
j
i
`
E importante osservare che se in particolare `e a sua volta il dierenziale di una funzione,
cio`e se = df, allora d = 0 perche
i
=
i
f e quindi le componenti (5.49) si annullano
per la commutabilit` a delle derivate parziali. Da questa considerazione si deducono due
fatti importanti: (i) per ogni funzione si ha ddf = 0, (ii) condizione necessaria anche una
1-forma sia un dierenziale esatto `e che sia d = 0. Come si osserver` a pi` u avanti, questa
condizione `e anche suciente, in senso locale. Ci si pone inoltre un problema analogo a
quello posto per le 1-forme: stabilire se una data 2-forma `e esatta, cio`e il dierenziale
di una 1-forma : = d. Per questo occorre considerare le 3-forme ed i dierenziali
di 2-forme. Lo stesso problema si presenta quindi successivamente per forme di grado
superiore.
194 Capitolo 5. Meccanica lagrangiana
5.4.4 Prodotto esterno di 1-forme
Il prodotto tensoriale
1
2
. . .
p
di p 1-forme ha una denizione analoga a quella
data in 2: applicato ad una successione (X
1
, X
2
, . . . , X
p
) di p campi vettoriali d` a come
risultato il prodotto numerico delle valutazioni tra ogni 1-forma ed il vettore dello stesso
posto. Il prodotto esterno di p 1-forme (
1
,
2
, . . . ,
p
) `e la p-forma denita da
(5.50)
1
2
. . .
p
=
Gp
()
(1)
(2)
. . .
(p)
dove G
p
`e il gruppo simmetrico dordine p (cio`e il gruppo delle permutazioni di p oggetti),
((1), (2), . . . , (p)) `e la permutazione degli indici (1, 2, . . . , p) e () = 1 a seconda
che sia pari o dispari. Nella (5.50) il prodotto esterno `e anticommutativo, nel senso
che scambiando fra loro due delle 1-forme, tutto cambia di segno. Inoltre esso `e lineare su
ogni fattore.
Nota 5.4.1 Indipendenza di funzioni. Date k funzioni reali dierenziabili (f
1
, . . . , f
k
)
su una variet` a Q queste si dicono indipendenti se in ogni punto di Q i loro dierenziali
sono linearmente indipendenti. Dalle propriet` a del prodotto esterno di 1-forme segue che
lindipendenza `e caratterizzata dalla condizione
df
1
. . . df
k
,= 0.
Si noti che n funzioni indipendenti (n = dim(Q)) determinano un sistema di coordinate.
5.4.5 Rappresentazione locale delle p-forme
Estendendo quanto visto per le 2-forme, si pu` o dimostrare che su di una carta di coordi-
nate (q
i
) una p-forma `e combinazione lineare di prodotti esterni dei dierenziali delle
coordinate dq
i
, ammette cio`e una rappresentazione del tipo
(5.51)
_
_
=
1
p!
i
1
i
2
...ip
dq
i
1
dq
i
2
. . . dq
ip
i
1
i
2
...ip
= (
i
1
,
i
2
, . . . ,
ip
)
dove le componenti
i
1
i
2
...ip
sono antisimmetriche, cambiano cio`e di segno scambiando fra
loro due indici qualsiasi (e sono quindi nulle se due indici coincidono). Inoltre, comunque
si assegnino p campi vettoriali, si ha
(5.52) (X
1
, X
2
, . . . , X
p
) =
i
1
i
2
...ip
X
i
1
1
X
i
2
2
. . . X
ip
p
con (come al solito) somma sottintesa su tutti gli indici ripetuti in alto e in basso. Per
esempio nel caso di una 3-forma (p = 3) si ha
(5.53)
_
_
_
=
1
6
ijk
dq
i
dq
j
dq
k
,
ijk
= (
i
,
j
,
k
)
5.4. Forme dierenziali su variet`a 195
e
(5.54) (X, Y , Z) =
ijk
X
i
Y
j
Z
k
.
5.4.6 Dierenziale di una p-forma
Rappresentata una p-forma come nella (5.51) il suo dierenziale `e la p + 1-forma denita
da
(5.55)
d =
1
p!
d
i
1
i
2
...ip
dq
i
1
dq
i
2
. . . dq
ip
=
1
p!
i
0
i
1
i
2
...ip
dq
i
0
dq
i
1
dq
i
2
. . . dq
ip
Per esempio, se `e una 2-forma, si ha
(5.56) d =
1
2
h
ij
dq
h
dq
i
dq
j
.
Con un procedimento analogo a quello visto per il dierenziale di una 1-forma si vede che
le componenti di d sono
(d)
hij
=
1
2
_
ij
+
i
jh
+
j
hi
h
ji
j
ih
hj
_
.
Ma le
ij
sono antisimmetriche, quindi
(5.57) (d)
hij
=
h
ij
+
i
jh
+
j
hi
Si noti che a secondo membro gli indici sono permutati ciclicamente. Se applichiamo la
denizione di dierenziale alla (5.56) troviamo che
dd =
1
2
d(
h
ij
) dq
h
dq
i
dq
j
=
1
2
k
ij
dq
k
dq
h
dq
i
dq
j
.
Siccome la somma
k
ij
dq
k
dq
h
tra indici (k, h) simmetrici (quelli delle due derivate
parziali, che commutano) e antisimmetrici (quelli dei prodotti esterni) `e nulla, si ha (anche
per p > 2) dd = 0. Le considerazioni precedenti conducono alle seguenti denizioni e
propriet` a fondamentali per il calcolo dierenziale.
Definizione 5.4.2 Una p-forma si dice chiusa se d = 0. Una p-forma si dice
esatta se `e il dierenziale di una (p 1)-forma , chiamata potenziale di : = d.
Dalla propriet` a d
2
= 0 osservata in precedenza segue che ogni forma esatta `e chiusa.
Limplicazione inversa `e valida sotto opportune condizioni coinvolgenti il grado della forma
e la topologia del dominio di denizione. Si pu` o dimostrare che:
Teorema 5.4.1 Lemma di Poincare.
5
Su di una variet` a Q omeomeorfa a R
n
ogni
p-forma chiusa `e esatta.
5
Jules Henri Poincare, 1854-1912.
196 Capitolo 5. Meccanica lagrangiana
Per le 1-forme e per n = 2 o n = 3 si dimostra pi` u in particolare che se il dominio D
`e semplicemente connesso, cio`e tale che al suo interno ogni curva chiusa `e deformabile
con continuit` a in un punto, allora la chiusura implica lesattezza. Stante il fatto che ogni
punto di una variet` a ammette un intorno omeomorfo a R
n
, dal lemma di Poincare segue
che:
Teorema 5.4.2 Ogni forma chiusa `e localmente esatta: per ogni punto della variet` a
esiste un intorno aperto in cui `e esatta.
Ci` o vuol dire che una forma chiusa ammette nellintorno di ogni punto dei potenziali, detti
potenziali locali. Possiamo schematizzare la precedente discussione nel quadro seguente:
forma esatta = forma chiusa
forma chiusa = forma localmente esatta
forma chiusa su dominio R
n
= forma esatta
Nota 5.4.2 Se una forma `e esatta allora il suo potenziale `e denito a meno di una
forma chiusa. Vale a dire: se = d, allora ogni forma del tipo
= + con d = 0
`e ancora un potenziale di , perche d = d
. In particolare se `e una 1-forma i suoi
potenziali sono funzioni che dieriscono per delle costanti sulle componenti connesse del
dominio di denizione.
Nota 5.4.3 La (5.49) e la (5.57) mostrano che le condizioni di chiusura d = 0 di una
1-forma o di una 2-forma si traducono rispettivamente in componenti, qualunque siano
le coordinate scelte, nelle equazioni
(5.58)
i
j
=
j
i
(5.59)
h
ij
+
i
jh
+
j
hi
= 0
5.4.7 Prodotto tensoriale e prodotto esterno
Diamo in ultimo le denizioni generali del prodotto e del prodotto esterno.
(i) Il prodotto tensoriale di una forma p-lineare (qualunque, anche non
antisimmetrica) per una forma q-lineare `e la forma p +q-lineare denita da
(X
1
, . . . , X
p
, X
p+1
, . . . , X
p+q
) = (X
1
, . . . , X
p
) (X
p+1
, . . . , X
p+q
).
(ii) Il prodotto esterno di una p-forma per una q-forma `e la p + q-forma
denita da
=
(p +q)!
p! q!
A( )
5.5. Sistemi olonomi 197
dove A `e loperatore di antisimmetrizzazione denito su di una forma p-lineare
qualsiasi da
A =
1
p!
Gp
() ,
dove G
p
`e il gruppo delle permutazioni di ordine p e () = 1 `e il segno (o parit` a) di .
Queste denizioni si estendono al caso in cui p = 0 ponendo semplicemente
f = f = f .
(iii) Il prodotto esterno gode delle seguenti propriet` a:
_
_
= (1)
pq
,
_
a+b
_
= a + b ,
( ) = ( ).
La prima `e una propriet` a commutativa graduata. La seconda mostra che il prodotto
esterno `e bi-lineare (`e lineare sul primo fattore, e quindi anche sul secondo, tenuto conto
che vale la propriet` a commutativa graduata). La terza mostra che il prodotto esterno `e
associativo. Il prodotto esterno si estende per linearit` a alla somma diretta
(Q) =
+
p=0
p
(Q)
degli spazi delle p-forme su di una variet` a Q, la quale assume la struttura di algebra
associativa, detta algebra esterna su Q.
(iv) Nellambito della teoria delle derivazioni delle forme si dimostra che il dieren-
ziale `e lapplicazione d: (Q) (Q) univocamente denita dalle seguenti propriet` a
caratteristiche:
_
_
d
p
(Q)
p+1
(Q),
d(a + b ) = a d+b d (a, b R),
d( ) = d + (1)
p
d,
d
2
= 0,
X, df) = X(f).
Dunque d aumenta di 1 il grado delle forme, `e R-lineare, soddisfa ad una regola di
Leibniz graduata, `e nilpotente e si riduce per le funzioni al dierenziale gi` a denito.
5.5 Sistemi olonomi
Un sistema meccanico pu` o essere schematizzato in un insieme di punti mobili, con o senza
vincoli, nello spazio ane tridimensionale euclideo, modello dello spazio sico osservato
198 Capitolo 5. Meccanica lagrangiana
da un riferimento. Sia P
il generico punto del sistema; lindice `e da intendersi variabile
in un opportuno insieme B, nito o innito. Scelta unorigine O dello spazio ane,
la posizione del punto P
`e caratterizzata dal vettore OP
= r
. Linsieme dei vettori
posizione r
; B denisce una congurazione del sistema. Denotiamo con Q
linsieme di tutte le possibili congurazioni che il sistema pu` o assumere, compatibilmente
coi vincoli imposti, rispetto ad un assegnato riferimento. Lo chiamiamo spazio delle
congurazioni.
Definizione 5.5.1 Un sistema di punti P
; B si dice olonomo se il corri-
spondente spazio delle congurazioni Q ha una struttura di variet` a dierenziabile. Si dice
allora che Q `e la variet` a delle congurazioni. La dimensione n di Q prende il nome di
numero dei gradi di libert` a del sistema. Le coordinate (q
i
) associate ad una qualunque
carta di Q prendono il nome di coordinate lagrangiane.
6
Per ogni indice B risulta denibile unapplicazione
(5.60) r
: Q E
3
,
da Q allo spazio vettoriale euclideo tridimensionale E
3
, che assegna il vettore posizione r
del punto P
in corrispondenza ad ogni congurazione del sistema. Scelte delle coordinate
(q
i
) su Q le applicazioni (5.60) si traducono in funzioni vettoriali r
(q
i
) nelle n variabili
(q
i
),
(5.61) OP
= r
(q
i
).
Queste funzioni svolgono un ruolo di ponte tra la descrizione tridimensionale del sistema
meccanico e quella, pi` u astratta, ambientata nella variet` a delle congurazioni Q; servono
cio`e a tradurre entit` a meccaniche rappresentate nello spazio ane tridimensionale eucli-
deo in entit` a sopra la variet` a delle congurazioni. Una volta costruita la struttura della
meccanica lagrangiana scompariranno completamente dalla discussione.
Posto che una congurazione di un sistema olonomo `e rappresentata da un punto sulla
variet` a delle congurazioni Q, un moto del sistema sar` a rappresentato dal moto di un
punto su Q vale a dire da una curva su Q,
: I Q: t (t).
Assegnate delle coordinate lagrangiane (q
i
), un moto `e allora descritto da equazioni
parametriche
(5.62) q
i
=
i
(t).
6
Si possono considerare denizioni pi` u generali di questa. Per esempio, assumere che la variet`a Q possa
essere una variet`a con bordo, cio`e ammettere delle carte sopra semispazi di R
n
. La nozione qui data di
sistema olonomo sar`a comunque estesa, nel prossimo paragrafo, ai sistemi con vincoli dipendenti dal tempo.
Le variet`a delle congurazioni che consideriamo sono supposte tutte di classe C
. Il termine olonomo,
derivato da oo (intero) e oo (legge), fu introdotto da H. Hertz (1857-1894) in unanalisi dei vincoli
che possono essere imposti ad un sistema meccanico. Esso sta a signicare che, pur essendo il sistema
costituito da un numero nito o innito di punti, in virt` u dei vincoli imposti la posizione di ciascuno di
questi `e determinata dai valori di un numero ridotto nito n di parametri reali (q
i
) = (q
1
, . . . , q
n
), come
mostra il ragionamento che segue.
5.5. Sistemi olonomi 199
Se queste si sostituiscono nelle funzioni r
(q
i
) che d` anno le posizioni dei singoli punti del
sistema, cio`e nelle (5.61), si trova il moto di ciascuno di questi:
OP
(t) = r
_
q
i
(t)
_
.
Derivando rispetto al tempo si trova anche la loro velocit` a:
(5.63) v
=
r
q
i
dq
i
dt
.
Chiamiamo atto di moto di un sistema olonomo un sistema di vettori (r
, v
), B
rappresentanti la posizione e la velocit` a dei suoi punti, compatibili con i vincoli imposti.
Il sistema di vettori r
, B rappresenta la congurazione corrispondente allatto
di moto. Latto di moto `e quindi un concetto istantaneo. Anche i vettori velocit` a
siano compatibili con i vincoli occorre e basta che in un qualsiasi sistema di coordinate
lagrangiane si abbia
(5.64)
r
= r
(q
i
),
v
=
r
q
i
q
i
, ( q
i
) R
n
.
Ci` o segue dallanalogia formale tra la (5.63) e la seconda delle (5.64), posto
(5.65) q
i
=
dq
i
dt
.
Si osservi infatti che un moto, inteso come successione temporale di congurazioni, stabili-
sce una successione temporale di atti di moto e che, viceversa, un atto di moto compatibile
coi vincoli pu` o sempre essere inteso come immagine istantanea della distribuzione dei vet-
tori posizione e velocit` a dei punti del sistema olonomo durante un qualche moto. Pertanto:
al variare delle coordinate (q
i
) nel loro dominio U di denizione e delle ( q
i
) in tutto R
n
, le
equazioni (5.64) forniscono tutti i possibili atti di moto corrispondenti alle congurazioni
dellinsieme U. I parametri ( q
i
), chiamati velocit` a lagrangiane, possono interpretarsi
come componenti di un vettore tangente alla variet` a Q. Di conseguenza un atto di moto in
una congurazione q Q si identica con un vettore tangente v T
q
Q e quindi il brato
tangente rappresenta linsieme di tutti i possibili atti di moto del sistema olonomo. Per
questo la variet` a tangente TQ `e anche chiamata variet` a delle velocit` a. Riassumiamo
la discussione precedente nel quadro seguente:
Esempio 5.5.1 Punto libero. Lesempio pi` u semplice di sistema olonomo `e il punto
libero. La variet` a delle congurazioni Q coincide con lo spazio ane euclideo tridimen-
sionale E
3
(dunque il numero dei gradi di libert` a `e 3). Come coordinate lagrangiane si
possono scegliere delle coordinate cartesiane ortonormali (x, y, z). Il vettore posizione `e
allora ovviamente dato da
r(x, y, z) = x i + y j +z k.
200 Capitolo 5. Meccanica lagrangiana
Congurazione: punto q della variet` a Q
Moto: curva : I Q sulla variet` a Q.
Atto di moto: vettore v tangente a Q.
Si possono anche scegliere coordinate non cartesiane (q
i
) = (q
1
, q
2
, q
3
). La congurazione
del punto `e descritta da una sola funzione vettoriale
OP = r(q
1
, q
2
, q
3
)
soddisfacente alla condizione che i vettori e
i
= r/q
i
siano ovunque indipendenti.
Esempio 5.5.2 Sistema nito di punti liberi. Si consideri un sistema costituito da
N punti liberi. La variet` a delle congurazioni Q `e lo spazio ane E
N
3
R
3N
, potenza N-
sima di E
3
R
3
. Si possono prendere come coordinate lagrangiane le coordinate cartesiane
(x
, y
, z
) di tutti i punti. Allora le funzioni vettoriali (5.60) sono semplicemente date da
r
= x
i +y
j + z
k.
Da Q si possono eventualmente togliere quelle congurazioni in cui due o pi` u punti ven-
gono a coincidere (si escludono cos` le collisioni). Queste congurazioni formano nel loro
complesso un sottoinsieme chiuso C Q = E
N
3
, quindi la variet` a delle congurazioni
senza collisioni `e una sottovariet` a aperta di Q.
Esempio 5.5.3 Punto vincolato ad una supercie regolare. La variet` a delle con-
gurazioni Q `e la stessa supercie (i gradi di libert` a sono 2). La posizione del punto `e
descritta da una funzione vettoriale
OP = r(q
1
, q
2
)
di due parametri (q
i
) (i = 1, 2), che `e la rappresentazione parametrica (locale) della super-
cie. Considerazioni analoghe valgono per un punto vincolato ad una curva regolare, per
cui si ha un solo grado di libert` a. Entrambi questi esempi sono casi particolari dellesempio
seguente.
Esempio 5.5.4 Sistemi di punti vincolati. Si consideri un sistema costituito da un
numero nito N di punti: P
( = 1, . . . , N). Si supponga che questi punti non siano liberi
ma sottoposti a vincoli di posizione rappresentati da r equazioni scalari indipendenti
F
a
(r
) = 0 (a = 1, . . . , r)
coinvolgenti i singoli vettori posizione r
. Queste si traducono in equazioni indipendenti
coinvolgenti le 3N coordinate cartesiane dei punti e deniscono pertanto una supercie
5.5. Sistemi olonomi 201
regolare Q, di dimensione 3N r, dello spazio ane E
N
3
R
3N
. Questa supercie `e la
variet` a delle congurazioni del sistema.
7
Esempio 5.5.5 Il pendolo. Dal punto di vista puramente cinematico `e un punto
vincolato ad una circonferenza. Dunque la sua variet` a delle congurazioni `e Q = S
1
.
Esempio 5.5.6 Si consideri unasta rigida con gli estremi vincolati a scorrere su due
guide rettilinee complanari e perpendicolari fra loro (Esempio 3.5.1, Figura 3.6). Si tratta
di un sistema olonomo ad un grado di libert` a la cui variet` a delle congurazioni `e ancora
Q = S
1
. Infatti ogni congurazione dellasta `e univocamente individuata dalla posizione
del suo punto medio che si muove su di una circonferenza di centro lintersezione delle
guide e raggio uguale alla met` a della lunghezza. Abbiamo cos` un esempio di due sistemi
olonomi, questo ed il pendolo semplice, dal punto di vista meccanico ovviamente diversi
ma con la stessa variet` a delle congurazioni.
Esempio 5.5.7 Il pendolo sferico. Dal punto di vista puramente cinematico `e un
punto vincolato ad una sfera. Dunque la sua variet` a delle congurazioni `e Q = S
2
.
Esempio 5.5.8 Si consideri unasta rigida con gli estremi vincolati a scorrere uno su
di una guida rettilinea e laltro su di un piano perpendicolare a questa. Si tratta di un
sistema olonomo a 2 gradi di libert` a la cui variet` a delle congurazioni `e ancora Q = S
2
.
Infatti, ogni congurazione `e univocamente individuata dalla posizione del punto medio
dellasta, e questo punto si muove sulla sfera di centro lintersezione della guida rettilinea
col piano e raggio uguale alla met` a della lunghezza dellasta. Ecco un altro esempio di
due sistemi olonomi diversi ma con la stessa variet` a delle congurazioni.
Esempio 5.5.9 Il bipendolo piano.
`
E costituito da due punti A e B mobili su di un
piano e vincolati rigidamente fra loro, con uno dei due (per esempio il punto A) collegato
rigidamente ad un punto sso O. Si tratta di un sistema olonomo la cui variet` a delle
congurazioni `e il prodotto cartesiano di due circonferenze, cio`e il toro bidimensionale:
Q = T
2
. Se i due punti, restando sso il punto O, non sono vincolati a muoversi su di un
piano allora la variet` a delle congurazioni `e Q = S
2
S
2
. Si tratta di un sistema a 4 gradi
di libert` a: il bipendolo sferico.
Esempio 5.5.10 I corpi rigidi. Ritorniamo allEsempio 5.5.4: sistemi di punti vinco-
lati. Un esempio fondamentale di vincolo di posizione `e il vincolo di rigidit` a: le mutue
distanze dei punti del sistema restano costanti. Se i punti sono due questo vincolo si tra-
duce in una sola equazione scalare ed il sistema ha quindi 5 gradi di libert` a. Se i punti
7
La denizione originaria di sistema olonomo deriva proprioda questo esempio, incluso il caso di un numero
innito di punti e di equazioni di vincolo (come per un corpo rigido continuo). Per questo motivo, prima
che il concetto di variet`a dierenziabile venisse utilizzato, le variet`a delle congurazioni venivano dette
variet`a vincolari.
202 Capitolo 5. Meccanica lagrangiana
_
`
Figura 5.6: Bipendolo piano
sono 3 le equazioni vincolari sono 3 e quindi il sistema ha 6 gradi di libert` a. Se i punti
sono pi` u di 3 i gradi di libert` a restano 6, perche ad ogni punto aggiunto si aggiungono
3 nuove coordinate ma anche 3 equazioni di vincolo, rappresentanti la costanza della di-
stanza dai primi tre punti. Daltra parte va anche osservato che le congurazioni di un
corpo rigido con un punto sso (che sia composto da un numero nito o innito di punti,
ma non allineati) sono in corrispondenza biunivoca col gruppo delle rotazioni SO(3) dello
spazio vettoriale euclideo tridimensionale (che `e una variet` a dierenziabile di dimensio-
ne 3). Dunque in questo caso la variet` a delle congurazioni `e Q = SO(3). Se il corpo
rigido `e libero, ogni sua congurazione `e invece determinata dalla posizione nello spazio
di un suo qualunque punto pressato e da una rotazione intorno a questo punto. Quindi
la variet` a delle congurazioni `e in questo caso il prodotto cartesiano Q = R
3
SO(3).
Proseguendo in questanalisi si conclude che un corpo rigido pu` o avere diverse variet` a delle
congurazioni. Ne elenchiamo alcune:
Q = R
3
SO(3),
Q = R
3
S
2
,
Q = SO(3),
Q = S
2
,
Q = R S
1
,
Q = S
1
,
corpo rigido libero.
segmento rigido libero.
corpo rigido con un punto sso.
segmento rigido con un punto sso.
corpo rigido scorrevole su di un asse sso.
corpo rigido con un asse sso.
5.6. Sistemi olonomi a vincoli dipendenti dal tempo 203
_
`
Figura 5.7: Lo spazio-tempo delle congurazioni.
A questelenco vanno aggiunti quei casi in cui uno o pi` u punti del corpo rigido sono
vincolati a speciali curve o superci (come negli Esempi 5.5.6 e 5.5.8).
5.6 Sistemi olonomi a vincoli dipendenti dal tempo
I vincoli imposti ai punti di un sistema meccanico possono dipendere dal tempo. Si pensi ad
esempio a uno o pi` u punti vincolati ad una supercie mobile con legge assegnata, oppure ad
un insieme di punti le cui mutue distanze variano nel tempo con legge assegnata. Occorre
dunque estendere la nozione di sistema olonomo in modo da includere anche questi casi.
Definizione 5.6.1 Un sistema olonomo `e un sistema di punti le cui possibili con-
gurazioni in tutti gli istanti formano una variet` a dierenziabile
Q di dimensione n + 1,
detta spazio-tempo delle congurazioni o variet` a estesa delle congurazioni, tale
che: (i) esiste una funzione dierenziabile t:
Q R che assegna ad ogni congurazione
listante a cui questa si riferisce; (ii) questapplicazione `e tale che per ogni t R linsieme
Q
t
di tutte le congurazioni possibili allistante t `e una sottovariet` a di dimensione n; (iii)
esiste una variet` a dierenziabile Q di dimensione n e un dieomorsmo : R Q
Q
tale da indurre per ogni t R un dieomorsmo
t
: Q Q
t
: q (t, q)
tra la variet` a Q e la variet` a Q
t
. Lintero n prende il nome di numero dei gradi di
libert` a, la variet` a Q di variet` a delle congurazioni di riferimento.
Nota 5.6.1 Nel linguaggio della geometria dierenziale la Denizione 5.6.1 si riassume
dicendo che un sistema olonomo `e costituito da una brazione t:
Q R di una variet` a
Q
204 Capitolo 5. Meccanica lagrangiana
sopra la retta reale R. Le bre sono le variet` a Q
t
delle congurazioni possibili allistante
t. Questa brazione `e triviale, cio`e tale che
Q risulta essere dieomorfa ad un prodotto
cartesiano RQ e la brazione t:
Q R equivalente alla proiezione naturale RQ R.
Il dieomorsmo prende allora il nome di trivializzazione della brazione Figura
5.7.
Esempio 5.6.1 Pendolo a lunghezza variabile. Si consideri un punto vincolato ad
una circonferenza su di un piano sso, con centro sso O e raggio (t) variabile (mai nullo).
Linsieme
Q di tutte le sue possibili congurazioni si pu` o identicare con il prodotto RS
1
.
Si pu` o prendere infatti come variet` a di riferimento Q la circonferenza S
1
di raggio unitario
e, tramite le semirette uscenti da O, stabilire tra questa ed ogni circonferenza Q
t
di raggio
(t) un dieomorsmo.
_
`
Figura 5.8: Pendolo a raggio variabile con legge assegnata.
Esempio 5.6.2 Si consideri un punto vincolato ad una circonferenza di centro sso,
raggio costante, ma ruotante con legge assegnata intorno ad un suo diametro sso. La
variet` a estesa delle congurazioni
Q non `e la sfera descritta dalla circonferenza (che `e, se
si vuole, linsieme di tutte le possibili posizioni occupabili dal punto), bens` il prodotto
cartesiano R S
1
. Occorre infatti distinguere le congurazioni estese, elementi di
Q,
non solo per la posizione eettivamente occupata dal punto, ma anche per listante in cui
tale posizione `e occupata.
Se si considerano coordinate (q
i
) sulla variet` a di riferimento Q e se si interpreta la funzione
t come ulteriore coordinata (che denotiamo anche con q
0
) risultano denite delle coordinate
(t, q
i
) sullo spazio-tempo delle congurazioni
Q. Di conseguenza la posizione dei singoli
punti del sistema `e determinata da funzioni vettoriali
(5.66) OP
= r
(t, q
i
).
5.7. Le equazioni di Lagrange 205
Se queste non dipendono dal tempo si ricade nel caso considerato al 5.6 dei sistemi
olonomi a vincoli indipendenti dal tempo, detti anche scleronomi. I sistemi olonomi
a vincoli dipendenti dal tempo sono detti reonomi.
Vi sono due modi, del tutto equivalenti, per rappresentare il moto di un sistema olonomo.
Un moto `e una sezione della brazione t:
Q R, cio`e unapplicazione dierenziabile
: R
Q
che associa ad ogni istante t R una congurazione (t) Q
t
, cio`e una congurazione
corrispondente allo stesso istante. Questa denizione non ricorre alla trivializzazione .
Un moto pu` o anche essere denito come curva
: R Q
sopra la variet` a di riferimento Q. Infatti, attraverso la trivializzazione , una curva su
Q genera una sezione ponendo
(t) =
_
t, (t)
_
.
Viceversa, una sezione genera una curva ponendo (si veda la Figura 5.7)
(t) =
1
t
_
(t)
_
.
Se, introdotte coordinate su Q, si considerano le equazioni parametriche q
i
=
i
(t) del-
la curva e queste si sostituiscono nelle (5.66), si ottengono i moti dei singoli punti.
Derivando si ottengono le velocit` a:
(5.67) v
=
r
q
i
dq
i
dt
+
r
t
.
Segue che un generico atto di moto compatibile con i vincoli, che chiameremo atto di
moto possibile o attuale, `e costituito dallinsieme dei vettori
(5.68)
_
_
r
= r
(t, q
i
),
v
=
r
q
i
q
i
+
r
t
,
con ( q
i
) R
n
, e quindi `e rappresentato da un vettore v tangente alla variet` a di riferimento
Q, di componenti ( q
i
).
5.7 Le equazioni di Lagrange
Un sistema olonomo `e costituito da punti liberi o vincolati. Nella dinamica newtoniana del
punto lazione dei vincoli `e rappresentata da un vettore F
r
, la forza o reazione vincolare,
sulle quali `e necessario imporre delle condizioni costitutive. La pi` u semplice `e quella di
206 Capitolo 5. Meccanica lagrangiana
vincolo liscio che si esprime nellortogonalit` a di F
r
al vincolo (curva o supercie). Per
poter estendere questo concetto al caso dei sistemi olonomi va innanzitutto osservato che
lortogonalit` a della reazione al vincolo si esprime con la condizione
F
r
r = 0
per ogni vettore r tangente al vincolo. Se il vincolo `e sso ogni vettore tangente r
rappresenta una velocit` a compatibile col vincolo, cio`e una velocit` a attuale. Se invece il
vincolo `e mobile (cio`e variabile nel tempo con legge assegnata) un suo vettore tangente r
non rappresenta pi` u in generale una velocit` a attuale ma soltanto una velocit` a virtuale
compatibile col vincolo supposto sso nellistante considerato. Si usa anche dire che un
tale vettore rappresenta uno spostamento virtuale.
Possiamo pertanto intendere per vincolo liscio un vincolo (sso o mobile) per il quale
la potenza virtuale della reazione vincolare `e nulla per ogni velocit` a virtuale. Questa
denizione ha il vantaggio di potersi estendere immediatamente al caso dei sistemi olonomi
pur di estendere a questi il concetto di velocit` a virtuale. Chiamiamo allora atto di
moto virtuale un atto di moto compatibile coi vincoli imposti al sistema, supposti ssi
(o irrigiditi, congelati) nellistante considerato. Con riferimento a quanto visto al
paragrafo precedente, un tale atto di moto sar` a costituito da un insieme di coppie di
vettori (r
, r
) deniti dalle equazioni
(5.69)
_
_
r
= r
(q
i
, t),
r
=
r
q
i
q
i
,
con (q
i
) parametri reali arbitrari.
_
`
Figura 5.9: Velocit` a virtuali e possibili per un pendolo a
raggio variabile.
5.7. Le equazioni di Lagrange 207
Un tale sistema di vettori `e anche detto spostamento virtuale (col che al termine po-
tenza virtuale usato nel seguito va sostituito il termine lavoro virtuale). Il confronto
con lespressione generale (5.68) di un atto di moto attuale giustica le (5.69): sono stati
cancellati i termini r
/t. Un tale atto di moto non `e quindi compatibile con i vincoli
a meno che questi siano indipendenti dal tempo, caso in cui questi termini sono iden-
ticamente nulli. Le q
i
possono ancora interpretarsi come componenti di un vettore r
tangente alla variet` a delle congurazioni Q, nel caso di un sistema a vincoli indipendenti
dal tempo, oppure alla bra Q
t
relativa allistante t considerato, nel caso di vincoli di-
pendenti dal tempo. In questo secondo caso, per il dieomorsmo
t
: Q
t
Q, il vettore
r pu` o intendersi tangente alla variet` a di riferimento Q. Ci` o posto, possiamo assumere la
seguente
Definizione 5.7.1 Diciamo che un sistema olonomo `e perfetto o ideale (o a vincoli
perfetti o ideali) se la potenza virtuale W
(v)
r
delle forze reattive `e nulla per ogni atto di
moto virtuale.
Nel caso in cui il sistema sia costituito da un numero nito N di punti
8
questa potenza `e
data da
(5.70) W
(v)
r
=
N
=1
F
r
r
dove F
r
`e il risultante delle forze reattive sul punto P
.
Esempio 5.7.1 Il vincolo di rigidit` a `e, per il principio di azione e reazione, perfetto.
Consideriamo infatti per semplicit` a due punti di un corpo rigido. La potenza virtuale delle
forze reattive che i due punti si esercitano mutuamente `e W
(v)
12
= F
r1
r
1
+ F
r2
r
2
.
Siccome F
r1
= F
r2
, si ha W
(v)
12
= F
r2
(r
2
r
1
). Ma per la formula fondamentale
di cinematica r
2
r
1
= (r
2
r
1
), quindi W
(v)
12
= 0 perche F
r2
`e parallelo a
(r
2
r
1
). Alla stessa conclusione si giunge anche osservando che: (i) il vincolo di rigidit` a
`e un vincolo indipendente dal tempo, quindi ogni atto moto virtuale `e anche attuale; (ii)
le forze reattive sono forze interne e queste, per il postulato delle forze interne, hanno
potenza nulla (Nota 4.13.3).
La distinzione tra atto di moto virtuale e atto di moto attuale conserva tuttavia la sua
importanza anche nel caso di sistemi scleronomi. Si consideri ad esempio il caso di un
punto libero soggetto alla forza di Coriolis o alla forza esercitata da un campo magnetico.
Entrambe le leggi di forza sono del tipo F = v. La potenza attuale di questa forza `e
identicamente nulla: F v = v v = 0. Con lintroduzione della velocit` a virtuale r,
intesa come puro vettore, la potenza virtuale `e espressa dal prodotto misto v r
e quindi non `e pi` u identicamente nulla. Di qui si osserva anche che `e possibile risalire al
vettore F conoscendo la sua potenza virtuale per ogni velocit` a virtuale (o per tre veloci` a
virtuali indipendenti), non quella attuale (che `e sempre nulla). Unanalisi pi` u approfondita
8
Nella discussione seguente ci limitiamo per semplicit`a a considerare questo caso, ma le conclusioni varranno
in generale per un sistema olonomo qualsiasi.
208 Capitolo 5. Meccanica lagrangiana
del caso di una forza attiva F agente su di un punto soggetto ad un vincolo liscio (sso
o mobile) mostra che linuenza che essa ha sul moto dipende solo dalla parte tangente
al vincolo, supposto questo congelato istante per istante, parte che `e completamente
determinata dalla sua potenza virtuale F r. Siamo allora condotti a porre particolare
attenzione al concetto di potenza virtuale delle forze attive agenti su di un sistema
olonomo. Sempre nel caso di un sistema nito di punti si ha
(5.71) W
(v)
a
=
N
=1
F
a
r
,
dove F
a
`e il risultante delle forze attive agenti sul punto P
.
La potenza virtuale delle forze attive risulta essere una forma lineare nelle componenti
(q
i
) dellatto di moto virtuale,
(5.72) W
(v)
a
=
i
q
i
i cui coecienti
i
prendono il nome di forze lagrangiane o di componenti lagrangiane
delle forze attive. Infatti, sempre nel caso di un sistema nito, si ha
W
(v)
a
=
N
=1
F
a
r
N
=1
F
a
r
q
i
q
i
.
Vale quindi la (5.73) con
(5.73)
i
=
N
=1
F
a
r
q
i
.
Nota 5.7.1 Nel caso generale, in cui le forze attive dipendono dalla posizione e dal-
la velocit` a dei singoli punti ed eventualmente dal tempo, le forze lagrangiane risulta-
no essere funzioni delle coordinate lagrangiane, delle velocit` a lagrangiane e del tempo:
i
=
i
(q
, q
, t).
Nota 5.7.2 Nel caso di un solo punto la (5.73) diventa
i
= F
a
r
q
i
= F
a
e
i
.
Questa formula `e valida sia per il punto libero, nel qual caso i = 1, 2, 3 e le q
i
sono
coordinate dello spazio ane tridimensionale euclideo, sia per il punto vincolato ad una
supercie, nel qual caso i = 1, 2 e le q
i
sono coordinate superciali. Si osserva quindi che
per il punto libero le forze lagrangiane
i
coincidono con le componenti covarianti della
forza attiva rispetto alle coordinate q
i
.
Nota 5.7.3 La (5.73) mostra che per poter calcolare le forze lagrangiane si pu` o calcolare
la potenza virtuale delle forze attive per atti di moto virtuali in cui le velocit` a lagrangiane
virtuali (q
i
) sono tutte nulle salvo una. La componente
1
`e per esempio ottenibile
calcolando la potenza virtuale corrispondente allatto di moto virtuale ottenuto ponendo
q
2
= . . . = q
n
= 0 e q
1
= 1.
5.7. Le equazioni di Lagrange 209
Nota 5.7.4 Chiamiamo stato dinamico di un sistema meccanico la distribuzione
istantanea delle posizioni, velocit` a ed accelerazioni dei singoli punti.
Ad ogni stato dinamico si associa la potenza virtuale delle forze di massa W
(v)
m
,
dove per forza di massa o (forza dinerzia), nel caso di un singolo punto di massa m
,
sintende il vettore F
m
= m
. Anche la potenza virtuale delle forze di massa risulta
essere una forma lineare nelle componenti q
i
dellatto di moto vituale,
(5.74) W
(v)
m
= a
i
q
i
Per esempio, nel caso di un sistema nito di punti si ha
W
(v)
m
=
N
=1
F
m
r
=
N
=1
m
q
i
q
i
,
per cui vale la (5.74) con
(5.75) a
i
=
N
=1
m
q
i
.
Si hanno cos` tutti gli elementi per formulare un principio generale della meccanica che
governa, pur nella sua estrema semplicit` a, il comportamento dinamico di una vastissima
classe di sistemi meccanici, il
Principio di dAlembert-Lagrange:
9
Per un sistema a vincoli ideali, in corrispondenza
ad ogni stato dinamico e per ogni atto di moto virtuale `e nulla la somma della potenza
virtuale delle forze attive e della potenza virtuale delle forze di massa:
(5.76) W
(v)
a
+W
(v)
m
= 0
La (5.76) prende il nome di equazione simbolica della dinamica.
Nota 5.7.5 Si noti bene che nel caso di un solo punto materiale soggetto ad un vincolo
liscio questo principio `e equivalente allequazione fondamentale della dinamica ma = F
a
+
F
r
. Infatti, se la si moltiplica scalarmente per una generica velocit` a virtuale r si trova
F
a
r ma r = 0, perche F
r
r = 0, e quindi W
(v)
a
+ W
(v)
m
= 0. Ragionando
inversamente, da questultima equazione, supposta valida per ogni velocit` a virtuale, segue
che F
a
ma = F
r
con F
r
vettore ortogonale al vincolo.
Mostriamo ora come dal principio di DAlembert-Lagrange discendano le equazioni fon-
damentali della dinamica dei sistemi olonomi.
9
Jean-Baptiste Le Rond dAlembert, 1717-1783.
210 Capitolo 5. Meccanica lagrangiana
Teorema 5.7.1 Comunque si scelgano le coordinate lagrangiane q
i
, i moti di un sistema
olonomo a n gradi di libert` a e a vincoli ideali sono rappresentati dalle soluzioni q
i
(t) delle
n equazioni dierenziali
(5.77)
d
dt
_
T
q
i
_
T
q
i
=
i
, (i = 1, . . . , n)
dove T `e lenergia cinetica del sistema e le
i
sono le forze lagrangiane.
Le equazioni (5.77) sono le celebri equazioni di Lagrange. Posto
q
i
=
dq
i
dt
, q
i
=
d q
i
dt
=
d
2
q
i
dt
2
,
esse risultano essere del secondo ordine nelle q
i
(t) (si veda la discussione pi` u avanti).
Dimostrazione. Viste la (5.73) e la (5.74), lequazione simbolica della dinamica (5.76)
si traduce nellequazione
(
i
+a
i
) q
i
= 0, (q
i
) R
n
.
Siccome le funzioni
i
e a
i
non dipendono dalle q
i
e queste sono arbitrarie, questequazione
equivale al sistema di n equazioni
(5.78)
i
+a
i
= 0 (i = 1, . . . , n).
Occorre allora sviluppare i coecienti a
i
a partire dalla (5.75). Dallespressione delle
velocit` a dei singoli punti
(5.79) v
=
r
q
i
q
i
+
r
t
,
derivando rispetto alle ( q
i
), segue lidentit` a
(5.80)
v
q
i
=
r
q
i
.
Se invece si deriva la (5.79) rispetto alle coordinate lagrangiane si trova
v
q
j
=
2
r
q
i
q
j
q
i
+
2
r
q
j
t
.
Daltra parte
d
dt
r
q
j
=
2
r
q
i
q
j
q
i
+
2
r
q
j
t
,
per cui dal confronto con la precedente espressione segue lidentit` a
(5.81)
v
q
j
=
d
dt
r
q
j
.
5.7. Le equazioni di Lagrange 211
A partire dalla (5.75) si ha allora successivamente, tenuto conto delle identit` a (5.80) e
(5.81) (omettiamo il simbolo di sommatoria rispetto allindice ):
a
i
= m
dv
dt
r
q
i
= m
_
v
d
dt
r
q
i
d
dt
_
v
q
i
__
= m
_
v
q
i
d
dt
_
v
q
i
__
=
T
q
i
d
dt
T
q
i
,
osservato in ultimo che lenergia cinetica `e per denizione
(5.82) T =
1
2
N
=1
m
.
Dalle (5.78) seguono allora le equazioni di Lagrange. 2
Un primo grande vantaggio del metodo lagrangiano `e che le equazioni di Lagrange sono di
immediata scrittura, una volta note le espressioni delle forze lagrangiane
i
e dellenergia
cinetica T. Sul calcolo delle forze lagrangiane si `e gi` a detto nella Nota 5.7.3 e si ritorner` a
ancora pi` u avanti (5.9).
Nota 5.7.6 Espressione generale dellenergia cinetica. Lenergia cinetica risulta
essere un polinomio di secondo grado nelle velocit` a lagrangiane
(5.83) T =
1
2
g
ij
q
i
q
j
+ g
0i
q
i
+
1
2
g
00
a coecienti (g
ij
, g
0i
, g
00
) dipendenti dalle coordinate lagrangiane e dal tempo. Infatti (ci
limitiamo al solito a considerare un sistema nito di punti) sostituendo lespressione (5.79)
delle velocit` a nella denizione (5.82) dellenergia cinetica si vede che vale la (5.83) posto
(5.84)
_
_
g
ij
=
N
=1
m
q
i
r
q
j
,
g
0i
=
N
=1
m
t
r
q
i
,
g
00
=
N
=1
m
t
r
t
.
Nel caso di vincoli indipendenti dal tempo i coecienti g
0i
e g
00
si annullano identicamente
e lenergia cinetica risulta essere una forma quadratica:
(5.85) T =
1
2
g
ij
q
i
q
j
Questa `e denita positiva: innanzitutto perche lenergia cinetica, per sua stessa denizio-
ne, `e una quantit` a positiva, nulla se e solo se tutti i punti del sistema hanno velocit` a nulla
cio`e se latto di moto `e nullo; inoltre gli atti di moto nulli sono caratterizzati dallannullarsi
di tutte le velocit` a lagrangiane, quindi T 0 con T = 0 se e solo se ( q
i
) = 0. Anche nel
caso di vincoli indipendenti dal tempo la parte quadratica omogenea dellenergia cinetica
(5.83) risulta essere una forma quadratica denita positiva. Per riconoscerlo basta ripe-
tere il ragionamento precedente considerando per` o atti di moto virtuali, cio`e con vincoli
istantaneamente ssi, perche la parte quadratica omogenea `e proprio lenergia cinetica
corrispondente a questi atti di moto.
212 Capitolo 5. Meccanica lagrangiana
Mettiamo in opera il metodo lagrangiano, mostrandone lecacia, con alcuni esempi,
semplici ma signicativi.
Esempio 5.7.2 Il bipendolo piano (Esempio 5.5.9). Supposti nulli gli attriti, i vincoli
sono perfetti. Si consideri per semplicit` a il caso in cui le masse dei due punti A e B sono
uguali (= m) cos` come le lunghezze dei due segmenti OA e AB (= ). Fissato un
riferimento cartesiano (O, x, y) come in gura (asse x verticale orientato verso il basso e
asse y orizzontale), conviene scegliere come coordinate lagrangiane i due angoli (q
1
, q
2
) =
(, ) come in gura. (a) Calcolo dellenergia cinetica: i vettori posizione dei due punti
sono
r
A
= (cos i + sin j), r
B
= r
A
+ (cos i + sinj),
quindi le loro velocit` a sono
v
A
=
( sin i + cos j), v
B
= v
A
+
( sini + cos j).
Di qui segue
v
2
A
=
2
2
, v
2
B
=
2
_
2
+
2
+ 2 cos( )
,
quindi
T =
1
2
m(v
2
A
+v
2
B
) =
1
2
m
2
_
2
2
+
2
+ 2 cos( )
(b)Calcolo delle forze lagrangiane: seguono dal calcolo della potenza virtuale delle forze
attive: W
(v)
a
=
i
q
i
=
. In questo caso W
(v)
a
= mg r
A
+ mg r
B
.
Con atto di moto ( ,= 0, = 0), che provoca una rotazione del segmento OA ed una
traslazione del segmento AB, si ha r
A
= r
B
= ( sin i + cos j) e quindi, posto
che g = g i, W
(v)
a
= 2 mg sin . Dunque
= 2 mg sin
Con atto di moto ( = 0, ,= 0), che provoca una rotazione del solo segmento AB, si
ha r
A
= 0 e r
B
= ( sin i + cos j) e quindi W
(v)
a
= mg sin. Dunque
= mg sin
(c) Le equazioni di Lagrange: tenuto conto che
_
_
T
= m
2
(2
+ cos( )
),
T
= m
2
sin( )
,
_
_
T
= m
2
(
+ cos( )
),
T
= m
2
sin( )
,
risultano essere, dividendo per m,
_
_
2
+ cos( )
+ sin( )
2
+ 2
g
sin = 0,
+ cos( )
sin( )
2
+
g
sin = 0.
5.8. Meccanica riemanniana 213
Esempio 5.7.3 Il pendolo a lunghezza variabile (Esempio 5.6.1). Utilizzando
coordinate polari (r, ) e tenuto conto che r = (t) si trova subito che
T =
1
2
mv
2
=
1
2
m
_
2
+
2
2
_
Lunica forza attiva `e la gravit` a F = mg (la forza che provoca la variazione della lunghezza
del pendolo `e di natura vincolare). La potenza virtuale `e formalmente identica a quella
del pendolo a lunghezza ssa:
W
(v)
a
= F r = mg sin ,
per cui la forza lagrangiana `e
= mg sin
Poiche
T
= m
2
,
d
dt
_
T
_
= 2 m
+m
2
,
T
= 0,
lequazione di Lagrange divisa per m
2
(supposto (t) ,= 0) diventa
+ 2
+
g
sin = 0
Chiaramente, per
= 0 ( = cost.) si ritrova lequazione del pendolo.
5.8 Meccanica riemanniana
In questo paragrafo limitiamo le nostre considerazioni ai sistemi olonomi con vincoli indi-
pendenti dal tempo (5.5). Si `e osservato alla ne del paragrafo precedente che lenergia
cinetica `e per un tale sistema una forma quadratica denita positiva nelle velocit` a lagran-
giane. Tale circostanza `e di importanza fondamentale: grazie allenergia cinetica la variet` a
delle congurazioni di un sistema scleronomo assume la struttura di variet` a riemanniana.
Definizione 5.8.1 Una variet` a riemanniana
10
`e una coppia (Q, g) costituita da una
variet` a dierenziabile Q e da un tensore metrico g su Q. Un tensore metrico `e
unapplicazione dierenziabile
g: TQ
Q
TQ R
tale che per ogni punto q Q la restrizione
g
q
: T
q
QT
q
Q R
`e una forma bilineare simmetrica denita positiva.
11
10
Georg Friedrich Bernhard Riemann, 1826 - 1866.
11
Con TQ Q TQ si denota linsieme delle coppie di vettori (u, v) tangenti in un medesimo punto. `e una
variet`a di dimensione 3n, se n = dim(Q). Se la segnatura non `e positiva si ha una variet`a pseudo-
riemanniana o semi-riemanniana.
214 Capitolo 5. Meccanica lagrangiana
Una supercie regolare immersa in uno spazio ane euclideo fornisce un esempio elemen-
tare di variet` a riemanniana: il tensore metrico `e la prima forma fondamentale (2.7).
In un qualunque sistema di coordinate (q
i
) di Q il tensore metrico ammette una rappre-
sentazione locale del tipo
g = g
ij
dq
i
dq
j
,
Infatti, posto per denizione
dq
i
dq
j
(u, v) = u
i
v
j
,
risulta
g(u, v) = g
ij
u
i
v
j
.
I coecienti g
ij
, funzioni delle coordinate lagrangiane, formano una matrice quadrata nn
simmetrica e ovunque regolare, detta matrice metrica.
Il tensore metrico induce su ogni spazio tangente T
q
Q una struttura di spazio vettoriale
euclideo, quindi un prodotto scalare u v = g(u, v) ed una forma quadratica |u| =
g(u, u). Esso pertanto consente di estendere alle variet` a riemanniane alcune nozioni ed
operazioni proprie degli spazi ani euclidei (che sono particolari variet` a riemanniane). Ne
risulta una generalizzazione della geometria euclidea: la geometria riemanniana.
Per un sistema scleronomo lenergia cinetica `e una forma quadratica denita positiva:
T(v) =
1
2
g
ij
q
i
q
j
per ogni vettore tangente v di componenti ( q
i
). Si interpretano allora i suoi coecienti
g
ij
come componenti di un tensore metrico g, per cui
2 T(v) = g(v, v).
La presenza della struttura riemanniana sulle variet` a delle congurazioni stabilisce uno
stretto legame tra la geometria riemanniana e la meccanica lagrangiana. Come si `e detto,
il moto di un sistema olonomo `e rappresentato dal moto di un punto sopra la variet` a
delle congurazioni Q, cio`e da una curva : I Q descritta localmente da equazioni
paratriche q
i
=
i
(t) (brevemente: q
i
(t)). A questa curva corrisponde la curva tangente o
curva derivata Denizione ?? di equazioni parametriche
_
q
i
=
i
(t),
q
i
= D
i
(t),
che fornisce la velocit` a istantanea del sistema, vale a dire latto di moto istantaneo per
ogni t I. Grazie alla presenza del tensore metrico `e per` o possibile estendere ai si-
stemi olonomi anche il concetto di accelerazione. Essendo la trattazione rigorosa di
questo argomento al di sopra del livello di queste lezioni, possiamo procedere per analo-
gia con lespressione in coordinate generiche dellaccelerazione di un punto libero (2.27) o
dellaccelerazione intrinseca di un punto vincolato ad una supercie (2.74):
5.8. Meccanica riemanniana 215
Definizione 5.8.2 Chiamiamo accelerazione istantanea di un sistema olonomo in
un moto di equazioni q
i
(t) il vettore a(t) T
(t)
Q di componenti a
i
(t) denite da
(5.86) a
i
=
d
2
q
i
dt
2
+
i
jh
dq
j
dt
dq
h
dt
posto, con
i
=
q
i
,
(5.87)
i
jh
= g
ik
jhk
,
jhk
=
1
2
_
j
g
hk
+
h
g
kj
k
g
jh
_
.
essendo [g
ik
] la matrice inversa della matrice metrica [g
ij
]. Le funzioni
jhk
e
i
jh
sono
i simboli di Christoel corrispondenti alle coordinate (q
i
) (di prima e seconda specie
rispettivamente).
Si pu` o in eetti dimostrare, a parte lanalogia col caso del punto, che le a
i
si trasformano,
al cambiare delle coordinate, come le componenti di un vettore tangente, cio`e secondo la
formula (5.7).
Come per gli spazi ani euclidei, la presenza del tensore metrico consente di denire sulle
variet` a riemanniane una corrispondenza biunivoca tra 1-forme e campi vettoriali. Ad una
1-forma
(5.88) =
i
dq
i
corrisponde il campo vettoriale F =
tale che per ogni vettore v
(5.89) F v = v, ).
Le sue componenti sono denite da
(5.90) F
i
= g
ij
j
.
Queste componenti sono dette contravarianti.
Teorema 5.8.1 Le equazioni di Lagrange di un sistema olonomo a vincoli indipendenti
dal tempo sono equivalenti allequazione vettoriale
(5.91) a = F
sulla variet` a riemanniana delle congurazioni, cio`e al sistema di equazioni
(5.92)
d
2
q
i
dt
2
+
i
jh
dq
j
dt
dq
h
dt
= F
i
216 Capitolo 5. Meccanica lagrangiana
Dimostrazione. La dimostrazione ricalca formalmente quella del 2.2.2. Essa consiste
nel dimostrare che, posto a
i
= [T]
i
dove [T]
i
sono i primi membri delle equazioni di
Lagrange, allora le quantit` a a
i
= g
ij
a
i
assumono proprio la forma (5.86). Di qui, stante
la (5.90), segue che le equazioni di Lagrange [T]
i
=
i
sono equivalenti a a
i
= F
i
. Siccome
T
q
i
= g
ij
q
j
,
T
q
i
=
1
2
i
g
jh
q
j
q
h
,
d
dt
_
T
q
i
_
=
h
g
ij
q
h
q
j
+g
ij
d q
j
dt
,
si ha
[T]
i
= g
ij
d q
j
dt
+
h
g
ij
q
h
q
j
1
2
i
g
jh
q
j
q
h
.
Quindi, per la simmetria di q
j
q
h
e di g
ih
,
[T]
i
= g
ij
d q
j
dt
+
1
2
_
j
g
hi
+
h
g
ij
i
g
jh
_
q
j
q
h
= g
ij
d q
j
dt
+
jhi
q
j
q
h
.
Con linnalzamento dellindice i si trova la (5.86). 2
Nota 5.8.1 Laspetto newtoniano dellequazione (5.91) consente di aermare che: i
moti di un sistema olonomo a vincoli indipendenti dal tempo possono interpretarsi come
moti di un punto materiale di massa unitaria sulla variet` a riemanniana delle congu-
razioni, soggetto ad una forza F le cui componenti covarianti sono le forze lagrangiane.
Nota 5.8.2 Quando le forze lagrangiane sono nulle, F = 0, i moti di un sistema olo-
nomo si dicono moti spontanei: il sistema si muove soltanto sotto lazione dei propri
vincoli (perfetti, quindi non dissipativi). Lequazione (5.91) diventa a = 0. In analogia
con quanto visto per le superci possiamo denire i moti con accelerazione nulla moti
geodetici. Pertanto: i moti spontanei di un sistema olonomo sono moti geodetici sulla
variet` a riemanniana delle congurazioni. Sempre in virt` u di questanalogia segue che nei
moti spontanei lenergia cinetica `e costante. Come si vedr` a pi` u avanti Nota 5.13.1
la denizione di moto geodetico o di geodetica di una variet` a riemanniana pu` o darsi in
maniera diretta e generale, senza il ricorso allanalogia con la geometria delle superci.
Nota 5.8.3 Le equazioni (5.92) formano un sistema di n equazioni dierenziali del
secondo ordine in forma normale nelle funzioni incognite q
i
(t). Esso `e equivalente al
seguente sistema del primo ordine di 2n equazioni nelle 2n incognite q
i
(t) e q
i
(t):
(5.93)
_
_
dq
i
dt
= q
i
d q
i
dt
= F
i
i
jh
q
j
q
h
Se le forze lagrangiane non dipendono dal tempo questo sistema `e autonomo e corrisponde
quindi ad un campo vettoriale X
L
sopra il brato tangente TQ, che chiamiamo campo
lagrangiano. In questo caso per` o lintepretazione geometrica del campo vettoriale F `e
diversa. Esso non `e pi` u un campo vettoriale su Q bens` un campo vettoriale verticale
5.9. Il potenziale e la lagrangiana 217
su TQ. Un campo vettoriale F su TQ `e detto verticale se ogni sua curva integrale giace
su di una bra cio`e su di uno spazio tangente (che `e una sottovariet` a). Ci` o signica che il
sistema dinamico ad esso associato `e del tipo
(5.94)
_
_
dq
i
dt
= 0,
d q
i
dt
= F
i
(q
j
, q
k
).
In altri termini, un campo vettoriale su TQ `e verticale se per ogni funzione f costante
sulle bre (che quindi `e in denitiva una funzione su Q) si ha
(5.95) F, df) = 0.
Se denotiamo con X
G
il campo vettoriale geodetico, il cui sistema del primo ordine `e
(si confronti con il sistema di equazioni (2.80))
(5.96)
_
_
dq
i
dt
= q
i
,
d q
i
dt
=
i
jh
q
j
q
h
,
e le cui curve integrali rappresentano i moti geodetici (perche F
i
= 0), allora si riconosce
che
(5.97) X
L
= X
G
+F,
cio`e che X
L
dierisce da X
G
per il campo verticale F.
5.9 Il potenziale e la lagrangiana
Definizione 5.9.1 Sia dato un sistema olonomo a vincoli eventualmente dipendenti
dal tempo con variet` a delle congurazioni Q. Una funzione U : TQ R R, localmente
rappresentata da una funzione U(q
i
, q
i
, t) delle coordinate lagrangiane, delle velocit` a la-
grangiane e del tempo, `e detta potenziale se le forze lagrangiane sono esprimibili con la
formula
(5.98)
i
=
U
q
i
d
dt
_
U
q
i
_
Linteresse di questa denizione risiede nel fatto che se esiste un potenziale U allora le
equazioni di Lagrange assumono la forma
(5.99)
d
dt
_
L
q
i
_
L
q
i
= 0
218 Capitolo 5. Meccanica lagrangiana
introdotta la funzione
(5.100) L = T +U
Queste equazioni prendono il nome di equazioni di Euler-Lagrange. I primi membri,
che denoteremo con [L]
i
, prendono il nome di binomi lagrangiani. La funzione L `e
chiamata lagrangiana del sistema.
La lagrangiana `e una funzione reale su TQ R, esprimibile localmente in una funzione
L(q
i
, q
i
, t) delle coordinate lagrangiane, delle velocit` a lagrangiane e del tempo. La lagran-
giana racchiude in se tutte le caratteristiche e le propriet` a dinamiche del sistema olonomo,
perche `e con questa sola funzione che risultano determinate le equazioni che ne governano
tutti i possibili moti: le equazioni di Euler-Lagrange.
Analizziamo allora le condizioni di esistenza di un potenziale. Si consideri, come primo
caso, un sistema olonomo a vincoli indipendenti dal tempo e con forze lagrangiane di-
pendenti solo dalle coordinate lagrangiane. Come si `e visto al 5.8, le forze lagrangiane
possono interpretarsi come componenti di una forma dierenziale lineare sulla variet` a delle
congurazioni Q:
(5.101) =
i
dq
i
.
Il potenziale `e in questo caso una funzione U : Q R, cio`e una funzione delle sole
coordinate lagrangiane, per cui la (5.98) si semplica in
(5.102)
i
=
i
U.
Ci` o signica che
(5.103) = dU
cio`e che `e esatta e che U ne `e un potenziale nel senso della teoria delle forme dierenziali.
Il potenziale `e determinato a meno di una costante additiva. Sappiamo per il lemma
di Poincare che condizione necessaria per lesistenza di un potenziale (e suciente per
lesistenza locale) `e che questa forma sia chiusa,
(5.104) d = 0,
cio`e che valgano le equazioni
(5.105)
i
j
=
j
i
.
Sulla variet` a delle congurazioni, il campo vettoriale F corrispondente alla forma `e il
gradiente di U: F = grad(U):
(5.106) F
i
= g
ij
j
U.
Un sistema olonomo a vincoli indipendenti dal tempo le cui forze agrangiane ammet-
tono un potenziale indipendente dalle velocit` a e dal tempo si dice sistema olonomo
5.9. Il potenziale e la lagrangiana 219
conservativo. Un sistema olonomo conservativo `e pertanto caratterizzato da una ter-
na (Q, g, U) dove (Q, g) `e la variet` a riemanniana delle congurazioni e U : Q R `e la
funzione potenziale.
Nel caso di un sistema olonomo a vincoli eventualmente dipendenti dal tempo ma con forze
lagrangiane non dipendenti dalle velocit` a (quindi dipendenti dalle coordinate lagrangiane
e dal tempo) il potenziale `e una funzione U : QR R, cio`e una funzione delle coordinate
lagrangiane e del tempo (si veda la Nota 5.9.5 pi` u avanti), per cui il legame (5.98) tra
potenziale e forze lagrangiane si riduce ancora allequazione (5.102).
Nota 5.9.1 Occorre osservare che, in questo come nel caso precedente, il potenziale U
`e legato alla potenza virtuale delle forze attive dallequazione
(5.107) W
(v)
a
= U =
i
U q
i
.
Qui il simbolo applicato alla funzione potenziale U ha formalmente il signicato di deri-
vata totale rispetto al tempo, fatta per` o con i vincoli supposti ssi. Lutilit` a del concetto
di potenziale risiede proprio nel fatto che esso si calcola di solito per via diretta, cio`e
senza il passaggio attraverso le forze lagrangiane, o mediante la (5.107) oppure sommando
i potenziali delle varie forze che operano sul sistema.
Esempio 5.9.1 Per il bipendolo piano (Esempio 5.5.9) si ha evidentemente U = mg x
A
+
mg x
B
e quindi U = mg (2 cos +cos ). Per il pendolo a raggio variabile (Esempio 5.5.3)
il calcolo del potenziale `e immediato, in base a quanto detto nellosservazione precedente:
U = mg x
P
= mg (t) cos .
Nota 5.9.2 Dato un sistema olonomo conservativo (Q, g, U), possiamo pensare di im-
porre a questo un ulteriore vincolo di posizione rappresentato da una sottovariet` a C Q:
le congurazioni ammissibili sono ora rappresentate dai punti di C. Si pu` o dimostrare,
ricorrendo al principio di dAlembert-Lagrange, che i moti del nuovo sistema vincolato
sono quelli del sistema olonomo conservativo (C, g[TC, U[C) dove la nuova variet` a delle
congurazioni `e C, il tensore metrico `e la restrizione di g ai vettori tangenti a C (ovvero
lenergia cinetica `e la restrizione di T agli atti di moto TC) e il potenziale `e la restrizione
della funzione U a C. Questa notevole propriet` a di restrizione `e unaltra delle importanti
caratteristiche del metodo lagrangiano.
Discutiamo ora il caso generale.
Poniamo q
0
= t, interpretando il tempo come coordinata sullo spazio-tempo delle con-
gurazioni
Q R Q. Poniamo inoltre (q
A
) = (q
0
, q
i
) con indici latini maiuscoli variabili
da 0 a n. Denotiamo con
A
la derivata parziale rispetto alla coordinata q
A
. Sviluppando
il secondo membro della (5.98), tenendo conto che q
i
=
dq
i
dt
, si trova
(5.108)
i
=
U
q
i
2
U
q
j
q
i
q
j
2
U
q
j
q
i
d q
j
dt
2
U
t q
i
.
Se si esclude per principio la dipendenza delle forze lagrangiane dalle accelerazioni, deve
essere identicamente
2
U
q
j
q
i
= 0.
220 Capitolo 5. Meccanica lagrangiana
La pi` u generale funzione U soddisfacente a queste equazioni `e un polinomio di primo grado
nelle velocit` a lagrangiane:
(5.109) U =
0
+
i
q
i
Se si sostituisce nelle (5.108) una funzione di questo tipo si trova
i
=
i
0
0
i
+ (
i
j
j
i
) q
j
.
Quindi se si pone
(5.110)
_
_
_
ij
=
i
j
j
i0
=
i
0
0
i
risulta
(5.111)
i
=
i0
+
ij
q
j
con
(5.112)
ij
=
ji
Si pu` o pertanto aermare che
Teorema 5.9.1 Esclusa la dipendenza dalle accelerazioni delle forze lagrangiane, con-
dizione necessaria anche queste ammettano un potenziale `e che esse siano polinomi di
primo grado nelle velocit` a lagrangiane a coecienti antisimmetrici, cio`e del tipo (5.111).
In tal caso il potenziale `e un polinomio di primo grado nelle velocit` a lagrangiane, cio`e del
tipo (5.109).
Si tratta ora di interpretare i legami (5.110) tra i coecienti del polinomio U ed i coecienti
dei polinomi
i
. Per far questo si osserva che ad un potenziale del tipo (5.109) corrisponde
una forma dierenziale lineare su T
Q
(5.113) =
0
dt +
i
dq
i
=
A
dq
A
.
mentre i coecienti (
i0
,
ij
) delle forze lagrangiane (5.111), posto
i0
=
0i
, possono
interpretarsi come componenti
(5.114) [
AB
] =
_
_
0
0j
i0
ij
_
_
di una 2-forma su T
Q:
(5.115)
=
1
2
AB
dq
A
dq
B
.
5.9. Il potenziale e la lagrangiana 221
Allora i legami (5.110) si traducono semplicemente nella condizione
(5.116)
= d
Infatti dierenziando la (5.113) si trova
d =
i
0
dq
i
dq
0
+
0
i
dq
0
dq
i
+
j
i
dq
j
dq
i
=
_
0
0
i
_
dq
i
dq
0
+
1
2
_
j
j
i
_
dq
i
dq
j
=
i0
dq
i
dq
0
+
1
2
ij
dq
i
dq
j
=
.
Si pu` o quindi aermare che
Teorema 5.9.2 Se le forze lagrangiane sono polinomi di primo grado nelle velocit` a
lagrangiane con coecienti antisimmetrici, cio`e del tipo (5.111), e se questi coecienti
si interpretano come componenti di una 2-forma
su
Q, allora condizione necessaria e
suciente anche esista un potenziale `e che
sia esatta:
= d . Il potenziale `e in
tal caso un polinomio di primo grado nelle velocit` a lagrangiane i cui coecienti sono le
componenti della 1-forma formula (5.109).
Ricordato il lemma di Poincare, si pu` o anche aermare che
Teorema 5.9.3 Condizione necessaria per lesistenza di un potenziale e condizione
suciente per lesistenza di potenziali locali `e che la 2-forma
sia chiusa: d
= 0.
Nota 5.9.3 In componenti la condizione di chiusura di
`e espressa dalle equazioni
(formula (5.59))
(5.117)
A
BC
+
B
CA
+
C
AB
= 0,
le quali si spezzano nei due gruppi di equazioni
(5.118)
_
_
_
jk
+
j
ki
+
k
ij
= 0
ij
+
i
j0
i0
= 0.
Nota 5.9.4 La (5.116) mostra che la 1-forma potenziale `e determinata a meno di
una forma esatta, cio`e che essa pu` o essere sostituita da + dF qualunque sia funzione
F : Q R R. Ci` o signica che il potenziale `e determinato a meno di funzioni additive
del tipo
0
F +
i
F q
i
,
pi` u ovviamente delle costanti.
Nota 5.9.5 Il caso delle forze lagrangiane non dipendenti dalle velocit` a lagrangiane `e
caratterizzato dalla condizione
ij
= 0 si veda la (5.111). La prima delle (5.110) mostra
che
i
j
=
j
i
e quindi che esiste una funzione F delle coordinate e del tempo tale che
i
=
i
F. La seconda delle (5.110) mostra a sua volta che
i
=
i0
=
i
(
0
0
F), cio`e
che vale la (5.102) con U =
0
0
F, cio`e che, se esiste il potenziale, questo `e funzione
delle sole coordinate e del tempo. La (5.109) mostra invece che il potenziale `e del tipo
U =
0
+
i
F q
i
, cio`e che `e lineare nelle velocit` a. Questa seconda conclusione non `e in
contraddizione con la prima per quanto visto nellosservazione precedente.
222 Capitolo 5. Meccanica lagrangiana
5.10 Il caso dello spazio euclideo tridimensionale
Adattiamo le considerazioni ora svolte al caso di un punto materiale mobile nello spazio
ane tridimensionale euclideo. Occorrono alcune premesse generali sul calcolo dierenziale
in tale spazio. La presenza del tensore metrico (cio`e del prodotto scalare fra vettori)
consente di denire, oltre alla corrispondenza biunivoca tra vettori e covettori e quindi
tra campi e 1-forme (come per ogni variet` a riemanniana), anche le operazioni di prodotto
vettoriale, prodotto misto e aggiunzione. Questultima `e una corrispondenza biunivoca,
denotata con , tra vettori e forme bilineari antisimmetriche (o 2-forme) e tra scalari e
forme trilineari antisimmetriche (o 3-forme). La combinazione di queste operazioni con
quella di dierenziale consente di introdurre, oltre alloperatore gradiente gi` a visto, altri
due operatori dierenziali sui campi vettoriali: il rotore e la divergenza.
Per denire tutte queste operazioni `e conveniente riferirsi ad un sistema di coordinate
cartesiane ortonormali (x
i
) = (x
1
, x
2
, x
3
) (gli indici latini saranno variabili da 1 a 3) di
versori (e
i
). In questo caso non vi `e dierenza tra i valori delle componenti contravarianti
e quelle covarianti dei vettori, nel senso che ad ogni vettore (o campo vettoriale)
v = v
i
e
i
,
corrisponde la forma lineare
v
= v
i
dx
i
dove
v
i
= v
i
.
Si osservi che in particolare si ha
e
i
= dx
i
.
Dunque i versori della base delle coordinate cartesiane corrispondono ai dierenziali delle
coordinate medesime. `e anche conveniente utilizzare il simbolo di Levi-Civita:
12
ijk
=
ijk
=
_
_
1
1
0
Vale 1 se la successione degli indici (i, j, k) `e una permutazione pari della successione
(1,2,3), vale 1 se invece `e dispari, vale 0 negli altri casi, cio`e quando almeno due indici sono
coincidenti. Il prodotto misto di tre vettori, che rappresenta il volume del parallelepipedo
da essi individuato, essendo dato dal determinante delle componenti cartesiane dei vettori,
`e denibile con la formula
(5.119) u v w =
ijk
u
i
v
j
w
k
.
Di conseguenza il prodotto vettoriale `e denito da
(5.120) (u v)
k
=
ijk
u
i
v
j
.
12
Tullio Levi-Civita, 1873-1941.
5.10. Il caso dello spazio euclideo tridimensionale 223
Laggiunzione, di cui si `e gi` a detto nella Nota 3.2.1, fa corrispondere ad ogni vettore
=
i
e
i
la 2-forma
(5.121) =
le cui componenti sono denite da
(5.122)
ij
=
ijk
k
.
Viceversa
(5.123) =
con
(5.124)
i
=
1
2
ijk
jk
.
Intesa la 2-forma come endomorsmo lineare, risulta
(5.125) (v) = v.
Infatti:
ij
v
i
=
ijk
v
i
k
=
kij
k
v
i
= ( v)
j
.
Il legame tra il prodotto esterno di 1-forme e il prodotto vettoriale di vettori `e dato dalla
formula
(5.126) (u
) = u v.
Infatti, posto = u
= u
, quindi
ij
= u
i
v
j
u
j
v
i
, e = , risulta:
i
=
1
2
ijk
(u
j
v
k
u
k
v
j
) =
ijk
u
j
v
k
,
cio`e = u v. La (5.126) d` a come caso particolare
(5.127) (dx
i
dx
j
) =
ijk
e
k
.
Laggiunzione fa inoltre corrispondere ad una 3-forma
=
1
3!
ijk
dx
i
dx
j
dx
k
lo scalare
(5.128) =
1
3!
ijk
ijk
.
e viceversa ad uno scalare a la 3-forma a di componenti
(5.129) (a)
ijk
= a
ijk
.
224 Capitolo 5. Meccanica lagrangiana
In particolare si ha
(5.130) (dx
i
dx
j
dx
k
) =
ijk
.
Dato un campo vettoriale F, il suo rotore `e il campo vettoriale denito da
(5.131) rot(F) = dF
Posto F = F
i
e
i
, si ha
F
= F
i
dx
i
(F
i
= F
i
)
e per la denizione di dierenziale
dF
=
j
F
i
dx
j
dx
i
.
Per la (5.127)
dF
=
j
F
i
(dx
j
dx
i
) =
j
F
i
jik
e
k
.
Dunque in componenti
(5.132)
_
rot(F)
_
k
=
kij
i
F
j
Si ritrova quindi la denizione che utilizza il determinante formale
(5.133) rot(F) =
e
1
e
2
e
3
1
2
3
F
1
F
2
F
3
La divergenza di un campo vettoriale F `e il campo scalare denito da
(5.134) div(F) = d F
Si ha successivamente, per le formule precedenti:
_
_
(F)
ij
=
ijk
F
k
,
F =
1
2
ijk
F
k
dx
i
dx
j
,
d F =
1
2
ijk
h
F
k
dx
h
dx
i
dx
j
,
d F =
1
2
ijk
h
F
k
(dx
h
dx
i
dx
j
) =
1
2
ijk
h
F
k
ijh
.
Va allora osservato che sussite lidentit` a
(5.135)
ijh
ijk
= 2
h
k
.
5.10. Il caso dello spazio euclideo tridimensionale 225
(il secondo membro `e il simbolo di Kronecker). Dunque in componenti risulta semplice-
mente
(5.136) div(F) =
k
F
k
Nota 5.10.1 La denizione (5.136) di divergenza si estende ad uno spazio ane di
dimensione qualsiasi, purche le coordinate scelte siano cartesiane. Tuttavia si pu` o ricono-
scere che la denizione resta valida anche se queste non sono ortonormali. In altri termini:
in uno spazio ane di dimensione qualunque la denizione di divergenza di un campo
vettoriale prescinde dalla presenza della metrica. Si tenga comunque presente che lopera-
zione di divergenza su campi vettoriali si estende a variet` a riemanniane, dove lintervento
del tensore metrico `e essenziale.
Nota 5.10.2 Se si introduce il vettore formale = (
i
) = (
1
,
2
,
3
) si hanno per i
tre operatori dierenziali gradiente, divergenza, rotore le denizioni formali:
(5.137)
_
_
grad(U) = U,
div(F) = F,
rot(F) = F.
Tutto ci` o premesso, dimostriamo che
Teorema 5.10.1 Nello spazio ane tridimensionale euclideo la pi` u generale forza che
ammette potenziali locali `e del tipo
(5.138) F = E B v
dove v `e la velocit` a ed E, B sono campi vettoriali (eventualmente dipendenti dal tempo)
soddisfacenti alle equazioni
(5.139) div(B) = 0,
B
t
+ rot(E) = 0
Il potenziale `e del tipo
(5.140) U = + A v
ed il legame tra forza e potenziale `e dato dalle equazioni
(5.141) B = rot(A), E = grad()
A
t
Dimostrazione. (i) La (5.138) `e infatti la traduzione in forma vettoriale della formula
(5.111), una volta introdotte le 1-forme = F
e = E
, corrispondenti alle forze F e
E, di componenti
i
e
i
=
i0
rispettivamente, e la 2-forma = B, di componenti
ij
,
226 Capitolo 5. Meccanica lagrangiana
aggiunta del campo B. Va osservato che B v = (v) e che in componenti
_
(v)
_
i
=
ji
v
j
. (ii) Le (5.139) sono le equivalenti vettoriali delle condizioni di chiusura (5.118).
Infatti queste ultime si traducono nella scrittura
_
d = 0,
0
+d = 0,
e quindi, operando con laggiunzione su entrambe,
_
d B = 0,
0
+ d = 0.
Vista le denizioni sopra date di divergenza e di rotore si trovano le (5.139). (iii) Lespres-
sione (5.140) del potenziale `e la traduzione della (5.109), denotata con = A
la 1-forma
di componenti
i
corrispondente al vettore A e posto
=
0
.
(iv) Inne le equazioni (5.141) sono equivalenti alle condizioni di esattezza (5.110). Infatti
queste ultime, con le posizioni fatte, sono equivalenti a
_
= d,
= d
0
.
Operando sulla prima con laggiunzione, sulla seconda con loperatore inverso di , e
ricordata la denizione di gradiente, si trovano le(5.141). 2
Una particella dotata di carica elettrica e immersa in un campo elettrico E e in un campo
magnetico B (nel vuoto) `e soggetta alla forza di Lorentz
F
L
= e
_
E
1
c
B v
_
,
dove c `e la costante velocit` a della luce. `e una forza del tipo (5.138). Le corrispondenti
equazioni (5.139), con B sostituito da
1
c
B, costituiscono la prima coppia delle fondamen-
tali equazioni di Maxwell dellelettromagnetismo.
13
Il vettore A `e detto potenziale
vettore, la funzione potenziale scalare.
14
Si noti che le equazioni di Maxwell (5.139)
si sono qui dedotte solo come condizioni necessarie per lesistenza di un potenziale, senza
alcuna altra considerazione dordine sico.
5.11 Sistemi lagrangiani
Nel paragrafo precedente si `e visto che la dinamica di un sistema olonomo dotato di
potenziale `e generata da una funzione caratteristica: la lagrangiana L = T + U.
Questa circostanza conduce alla seguente estensione del concetto di dinamica.
13
James Clerk Maxwell, 1831-1879.
14
Questi potenziali possono apparire di segno opposto in altri testi.
5.11. Sistemi lagrangiani 227
Definizione 5.11.1 Diciamo sistema lagrangiano una coppia (Q, L) costituita da
una variet` a dierenziabile Q di dimensione n, detta variet` a delle congurazioni, e da
una funzione reale L: TQ R R detta lagrangiana. Il sistema lagrangiano si dice
tempo-indipendente (brevemente, t-indipendente) se la lagrangiana si riduce ad una
funzione L: TQ R. La dinamica di un sistema lagrangiano `e linsieme delle curve su
TQ soluzioni del sistema di 2n equazioni dierenziali
(5.142)
_
_
dq
i
dt
= q
i
,
d
dt
_
L
q
i
_
L
q
i
= 0.
I primi membri del secondo gruppo di queste equazioni,
(5.143) [L]
i
=
d
dt
_
L
q
i
_
L
q
i
,
prendono il nome di binomi lagrangiani. Le equazioni (6.71)
2
prendono il nome di
equazioni di Euler-Lagrange. Si denotano al solito con (q
i
) generiche coordinate su Q
e con (q
i
, q
i
) le corrispondenti coordinate su TQ (coordinate e velocit` a lagrangiane). La
lagrangiana L `e quindi localmente rappresentata da una funzione nelle 2n + 1 variabili
(q
i
, q
i
, t) oppure nelle sole (q
i
, q
i
) nel caso t-indipendente. Il sistema (6.71) `e del primo
ordine nelle funzioni incognite q
i
(t) e q
i
(t). Le (6.71)
2
, grazie alle (6.71)
1
, si riducono a
equazioni del secondo ordine nelle q
i
(t).
Nota 5.11.1 Anche la denizione ora data di dinamica di un sistema lagrangiano
abbia senso occorre vericare il carattere intrinseco delle equazioni di Euler-Lagrange
(6.71), cio`e la loro indipendenza dalla scelta delle coordinate lagrangiane. Tuttavia, nel
caso dei sistemi olonomi, il carattere intrinseco di queste equazioni `e gi` a implicitamente
riconosciuto dal fatto che esse sono dedotte dal principio di DAlembert-Lagrange, che ha
carattere intrinseco. Nel prossimo paragrafo sar` a comunque dimostrato che le equazioni
di Euler-Lagrange, per una qualsiasi lagrangiana, sono equivalenti ad un altro principio di
natura intrinseca: il principio della minima azione.
Nota 5.11.2 In certi casi il sistema (6.71), inteso come sistema del primo ordine nelle
(q
i
, q
i
), pu` o essere posto completamente in forma normale (le prime n equazioni lo sono
gi` a) cio`e nella forma
(5.144)
_
_
dq
i
dt
= q
i
,
d q
i
dt
= f
i
(q
h
, q
k
, t).
Il sistema lagrangiano `e allora un sistema dinamico rappresentato da un campo vettoriale
X
L
, detto campo lagrangiano. Se la lagrangiana, e quindi i secondi membri del sistema
228 Capitolo 5. Meccanica lagrangiana
normale equivalente (6.73), non dipendono esplicitamente dal tempo, col che il sistema
(6.73) `e autonomo, questo campo vettoriale `e denito sopra il brato tangente TQ. Se
invece vi `e dipendenza dal tempo, `e denito sulla variet` a prodotto TQ R. In questo
secondo caso infatti, seguendo la stessa tecnica vista per la dinamica di un punto, si
introduce un tempo ttizio come ulteriore variabile e si aggiunge al sistema lequazione
d
dt
= 1. Quando un sistema lagrangiano `e di questo tipo si possono applicare tutte
le nozioni ed i teoremi relativi ai campi vettoriali, in particolare (sotto le solite ipotesi
di regolarit` a) il teorema di Cauchy per cui, assegnato un atto di moto iniziale, risulta
determinato un unico moto del sistema.
Definizione 5.11.2 Una lagrangiana si dice regolare se `e regolare la sua matrice
hessiana rispetto alle velocit` a lagrangiane, cio`e se `e det[g
ij
] ,= 0, posto
(5.145) g
ij
=
2
L
q
i
q
j
.
Teorema 5.11.1 Se la lagrangiana `e regolare il sistema (6.71) `e riducibile a forma
normale, cio`e equivalente ad un sistema del tipo (6.73).
Dimostrazione. Lo sviluppo dei binomi lagrangiani (primi membri delle (6.71)
2
) porta
alle seguenti equazioni (si tenga conto delle n equazioni
dq
i
dt
= q
i
)
2
L
q
j
q
i
q
j
+
2
L
q
j
q
i
d q
j
dt
+
2
L
t q
i
L
q
i
= 0,
che in generale non possono risolversi rispetto alle derivate delle ( q
i
). Se la lagrangiana
`e regolare ci` o `e possibile. Operando con la matrice inversa [g
ki
] si riconduce il sistema
(6.71) alla forma normale
(5.146)
_
_
dq
i
dt
= q
i
,
d q
k
dt
= g
ki
_
L
q
i
2
L
q
j
q
i
q
j
2
L
t q
i
_
.
2
Nota 5.11.3 Nel caso dei sistemi olonomi dotati di potenziale `e L = T + U. Poiche `e
lineare nelle velocit` a, il potenziale U non interviene nellhessiano (6.74) per cui
g
ij
=
2
L
q
i
q
j
=
2
T
q
i
q
j
.
Questi elementi coincidono proprio con i coecienti della parte omogenea quadratica
dellenergia cinetica,
T =
1
2
g
ij
q
i
q
j
+g
i0
q
i
+
1
2
g
00
.
Poiche, come si `e osservato nella Nota 5.7.6, questa `e una forma quadratica denita
positiva, si ha det[g
ij
] > 0 e la lagrangiana `e regolare.
5.12. Integrali primi dei sistemi lagrangiani 229
Nota 5.11.4 Si consideri una lagrangiana del tipo
(5.147) L =
0
F + q
i
i
F
dove F `e una funzione reale sopra Q R (quindi funzione delle coordinate lagrangiane e
del tempo). Poiche L `e lineare nelle velocit` a lagrangiane si ha identicamente g
ij
= 0. Non
`e dunque una lagrangiana regolare. Si verica che i binomi lagrangiani corrispondenti si
annullano identicamente. Ci` o signica che la dinamica di una tale lagrangiana `e costituita
da tutte le curve su Q. Di conseguenza, se ad una qualunque lagrangiana si aggiunge una
lagrangiana del tipo (6.76) la dinamica non risulta alterata.
15
5.12 Integrali primi dei sistemi lagrangiani
Definizione 5.12.1 Una funzione dierenziabile F : TQR R `e un integrale pri-
mo di un sistema lagrangiano (Q, L) se `e costante su tutte le soluzioni delle corrispondenti
equazioni di Euler-Lagrange, cio`e se in corrispondenza ad ogni soluzione vale la condizione
(5.148)
dF
dt
= 0.
Se il sistema lagrangiano `e regolare, equivalente quindi ad un campo lagrangiano X
L
, si
ricade nella solita denizione di integrale primo di un campo vettoriale. I teoremi seguenti
mettono in evidenza due integrali primi tipici dei sistemi lagrangiani.
Teorema 5.12.1 Se la lagrangiana `e indipendente dal tempo allora la funzione
(5.149) E =
L
q
i
q
i
L
detta energia, `e un integrale primo.
Dimostrazione. Derivando totalmente rispetto al tempo si trova
dE
dt
=
d
dt
_
L
q
i
_
q
i
+
L
q
i
d q
i
dt
L
q
i
dq
i
dt
L
q
i
d q
i
dt
L
t
.
Facendo intervenire le equazioni di Euler-Lagrange si trova
dE
dt
=
L
t
,
per cui lindipendenza dal tempo della lagrangiana, che equivale allannullarsi identico
della sua derivata parziale rispetto a t, implica
dE
dt
= 0. 2
15
Si veda anche la Nota 5.9.5.
230 Capitolo 5. Meccanica lagrangiana
Nota 5.12.1 Per un sistema scleronomo conservativo, dove il potenziale U `e una fun-
zione su Q (dipende solo dalle coordinate lagrangiane), la funzione E si riduce proprio
allenergia totale
(5.150) E = T U.
Infatti, siccome lenergia cinetica `e omogenea di grado 2 nelle velocit` a lagrangiane,
16
(5.151) q
i
T
q
i
= 2T
e di conseguenza
E =
L
q
i
q
i
L =
T
q
i
q
i
T U = T U.
Definizione 5.12.2 Dato un sistema lagrangiano (Q, L) ed un sistema di coordinate
(q
i
) sulla variet` a Q, le funzioni
(5.152) p
i
=
L
q
i
prendono il nome di momenti cinetici o impulsi. Una coordinata q
i
si dice ignorabile
se essa non compare nella lagrangiana, cio`e se si ha identicamente
(5.153)
L
q
i
= 0.
Teorema 5.12.2 Il momento corrispondente ad una coordinata ignorabile `e un integrale
primo.
16
`
E bene ricordare a questo proposito il teorema di Euler sulle funzioni omogenee. Una funzione F(v
i
)
di n variabili (v
i
) si dice omogenea di grado k se per ogni R si ha
F(v
i
) =
k
F(v
i
).
Il teorema di Euler aerma che se F(v
i
) `e una funzione omogenea di grado k allora si ha identicamente
(somma sottintesa sullindice ripetuto)
v
i
F
v
i
= k F.
Lenergia cinetica `e omogenea di grado 2 nelle v
i
per cui la (5.151) pu`o essere vista come conseguenza di
questo teorema. Se F `e omogenea di grado k allora le sue derivate parziali F/v
i
sono omogenee di grado
k 1. Infatti, derivando parzialmente luguaglianza precedente rispetto a v
j
, risulta
v
i
2
F
v
i
v
j
= (k 1)
F
v
j
.
Se in particolare `e k = 1 si trova che
v
i
2
F
v
i
v
j
= 0.
Di qui si trae che se una lagrangiana `e omogenea di grado 1 nelle velocit`a allora essa `e necessariamente
non regolare, perche valgono le equazioni
q
i
gij = 0
con le ( q
i
) non necessariamente nulle.
5.12. Integrali primi dei sistemi lagrangiani 231
Dimostrazione. Stante la denizione (5.152) le equazioni di Euler-Lagrange possono
scriversi
(5.154)
dp
i
dt
=
L
q
i
.
Se una coordinata q
i
`e ignorabile, il secondo membro `e identicamente nullo e quindi p
i
`e
costante. 2
Nota 5.12.2 Per un sistema olonomo con potenziale U =
0
+
i
q
i
i momenti cinetici
sono dati da
p
i
= g
ij
q
j
+g
0i
+
i
.
Per un punto libero e con potenziale indipendente dalla velocit` a i momenti cinetici p
i
coincidono con le componenti covarianti della quantit` a di moto p = mv: p
i
= mv e
i
.
Esempio 5.12.1 Per un punto libero e soggetto ad un campo conservativo la lagrangiana
`e (in coordinate cartesiane ortonormali)
L =
1
2
m
_
x
2
+ y
2
+ z
2
_
+ U(x, y, z),
per cui p
x
= m x, ecc. Se la forza `e perpendicolare allasse z allora il potenziale U
non dipende da z perche F
z
=
U
z
. Dunque anche la lagrangiana non dipende da z e il
corrispondente momento cinetico p
z
`e un integrale primo. Si ritrova cos` lintegrale primo
della quantit` a di moto rispetto ad una direzione.
Esempio 5.12.2 Nel moto piano di un punto soggetto ad un campo centrale simmetrico
la lagrangiana `e (in coordinate polari)
L =
1
2
m
_
r
2
+r
2
2
_
+U(r).
La coordinata `e ignorabile. Pertanto il corrispondente momento cinetico
p
=
L
= mr
2
`e un integrale primo. Si ritrova cos` lintegrale primo delle aree.
Nota 5.12.3 Nei due esempi precedenti gli integrali primi sono conseguenza di uninvarianza
della lagrangiana: nel primo caso rispetto a traslazioni lungo una direzione, nel secondo
rispetto a rotazioni intorno ad un punto. Anche lintegrale primo dellenergia `e conseguen-
za di uninvarianza: rispetto alle traslazioni temporali. Da questo punto di vista il tempo
t pu` o essere considerato come coordinata ignorabile. Questi fatti lasciano intravedere una
relazione generale tra lesistenza di integrali primi e linvarianza della lagrangiana rispetto
a trasformazioni o simmetrie della variet` a Q.
232 Capitolo 5. Meccanica lagrangiana
Esempio 5.12.3 Il giroscopio pesante o trottola di Lagrange. Uno dei primi
notevoli successi del metodo lagrangiano, in particolare rivolto alla ricerca di integrali
primi, si ebbe nello studio del moto di un corpo rigido pesante. Considerato un corpo rigido
con un punto sso O, si prendano come coordinate lagrangiane i tre angoli di Euler (, , )
della terna principale dinerzia (i, j, k) in O rispetto ad una terna ssa (c
1
, c
2
, c
3
), secondo
quanto stabilito nel 4.14. Le componenti (p, q, r) della velocit` a angolare secondo la
terna (i, j, k) sono date dalle formule (4.142). Poiche
T =
1
2
(Ap
2
+ Bq
2
+C r
2
),
con (A, B, C) momenti principali dinerzia, utilizzando le suddette formule si trova
T =
1
2
_
A(cos
+ sin sin
)
2
+B( sin
+ cos sin
)
2
+C (cos
+
)
2
_
.
Questespressione si semplica notevolmente nel caso in cui A = B, cio`e nel caso di un
corpo rigido simmetrico (detto anche giroscopio). Essendo p
2
+q
2
=
2
+sin
2
2
, risulta
infatti
T =
A
2
_
2
+ sin
2
2
_
+
C
2
_
cos
+
)
2
.
Nel caso in cui il corpo rigido simmetrico intorno allasse k sia soggetto alla sola forza
peso (come accade per una trottola), osservato che il baricentro G si trova sullasse di
simmetria, il potenziale `e dato da
U = mg cos ,
dove = [OG[ (il versore c
3
`e verticale e orientato verso lalto). La lagrangiana della
trottola `e pertanto
L =
A
2
_
2
+ sin
2
2
_
+
C
2
_
cos
+
)
2
mg cos
Si osserva allora che e sono coordinate ignorabili. Quindi i corrispondenti momenti
cinetici
_
_
p
=
L
= C
_
cos
+
_
= Cr,
p
=
L
=
_
A sin
2
+ C cos
2
_
+C cos
,
sono integrali primi.
17
Per lenergia totale si trova inoltre lespressione
E =
A
2
2
+
(p
cos )
2
2 A sin
2
+
p
2
2C
+mg l cos .
La presenza di questi tre integrali primi consente di riconoscere facilmente alcune inte-
ressanti propriet` a del moto di una trottola. Infatti dallintegrale dellenergia si trae une-
quazione di Weierstrass per langolo di nutazione , angolo che lasse della trottola forma
17
Che la componente r secondo lasse di simmetria k della velocit`a angolare sia un integrale primo segue
immediatamente dalla terza delle equazioni di Euler, C r = (A B) p q + Z, osservato che la componente
Z rispetto a tale asse del momento MO della forza peso `e nulla.
5.13. Il principio dellazione stazionaria 233
con la verticale. Meglio ancora, se si pone x = cos , si vede che lintegrale dellenergia si
traduce nellequazione di Weierstrass
x
2
= (x), (x) = (1 x
2
)(a b x) (c d x)
2
,
con le costanti (a, b, c, d) date da
a =
1
A
_
2E
p
2
C
_
, b =
2
A
mg , c =
p
A
, d =
p
A
.
La funzione (x) `e un polinomio di terzo grado che tende a + per x + (essendo
b > 0 con ,= 0). Le costanti di moto ammissibili devono essere tali da non produrre
tutti valori negativi di (x) nellintervallo [1, 1] (perche x = cos ). Siccome (1) =
(c d)
2
0, escludendo i casi in cui si hanno degli zeri agli estremi (si osservi che gli
angoli di Euler e non sono deniti per = 0 e = ), si devono avere almeno due
radici (x
1
, x
2
) allinterno di questintervallo (distinte o coincidenti). Pertanto langolo di
nutazione, fatta eccezione per i casi esclusi, varia periodicamente tra i due valori (
1
,
2
)
determinati da queste radici. Dai due integrali primi dei momenti cinetici si possono invece
ricavare la velocit` a di precessione
e la velocit` a di rotazione propria
in funzione di .
Risulta:
=
c d x
1 x
2
,
= e +
x(d x c)
1 x
2
,
posto ancora
e =
p
C
=
A
C
d.
Per quel che riguarda il moto di precessione si hanno tre casi, a seconda che lo zero di
, x
0
=
c
d
, si trovi allesterno o allinterno dellintervallo (x
1
, x
2
) o coincida con uno degli
estremi. Se si trova allesterno,
non cambia di segno e il moto di precessione `e monot` ono;
il punto P intersezione dellasse della trottola con la sfera unitaria di centro O descrive
una curva di tipo sinusoidale compresa tra i due meridiani (
1
,
2
). Se `e interno, siccome
cambia di segno, si ha invece un moto inanellato, cio`e di tipo cicloidale accorciato. Se
coincide con uno degli estremi, il moto di precessione non si inverte mai ma ha degli istanti
di arresto, per cui la curva descritta dallintersezione P presenta delle cuspidi. Inne, il
caso in cui i due zeri coincidono corrisponde a un moto di precessione regolare. Infatti
in questo caso `e costante e di conseguenza anche
e
sono costanti. Questi moti
di precessione sono stabili, nel senso che una piccola perturbazione non produce sensibili
eetti: infatti una piccola variazione delle costanti di moto non pu` o che produrre uno dei
tre casi precedenti, con i due meridiani ravvicinati.
5.13 Il principio dellazione stazionaria
Sia linsieme di tutte le n-ple
_
q
i
(t)
_
=
_
q
1
(t), . . . , q
n
(t)
_
di funzioni reali di classe C
k
sopra intervalli contenenti un pressato intervallo chiuso limitato [t
1
, t
2
] R. Chiamiamo
funzionale unapplicazione
: R
234 Capitolo 5. Meccanica lagrangiana
che ad ogni n-pla di funzioni fa corrispondere un numero reale. Un funzionale si dice
dierenziabile nel punto (q
i
(t)) se per ogni scelta degli incrementi o variazioni
q
i
(t) tali che
_
q
i
(t) + q
i
(t)
_
sussiste unuguaglianza del tipo
(5.155)
_
q
i
+q
i
_
= (q
i
) + (q
i
, q
i
) + R,
con funzionale lineare delle q
i
ed R funzionale di ordine superiore in tali incrementi.
Con ci` o si vuol dire che se si considera una famiglia di variazioni del tipo
(5.156) q
i
=
i
,
con
_
i
(t)
_
n-pla ssata a piacere ed parametro reale, osservato che risulta denita
la funzione reale
(5.157) F() = (q
i
+
i
),
allora il funzionale `e dierenziabile se per ogni scelta delle
i
risulta
(5.158) F() = F(0) +
_
A+()
_
con A costante e () innitesimo per 0. Dal confronto della (5.155) con la (5.158)
segue che
(5.159) A = (q
i
,
i
).
Il funzionale prende il nome di variazione prima del funzionale in (q
i
) . Poiche
dalla (5.158) segue
A =
_
dF
d
_
=0
,
per la (5.159) risulta
(5.160) =
_
dF
d
_
=0
.
Questa formula consente di calcolare la variazione prima di attraverso la funzione F
costruita con una qualsiasi famiglia di incrementi del tipo (5.156).
Una classe importante di funzionali `e costituita dai funzionali dazione. Sia L =
L(q
i
, q
i
, t) una funzione reale di classe C
2
in un dominio aperto D R
2n+1
(di coordinate
(q
i
, q
i
, t)) tale da rendere denito lintegrale
(5.161)
L
_
q
i
(t)
_
=
_
t
2
t
1
L
_
t, q
i
(t), q
i
(t)
_
dt
per ogni n-pla di funzioni reali
_
q
i
(t)
_
di classe C
1
sopra [t
1
, t
2
] (intendendo con q
i
le
derivate di queste funzioni). Lintegrale (5.161) denisce un funzionale sopra linsieme
di tali n-ple, funzionale che chiamiamo azione associata alla funzione L.
La funzione L(q
i
, q
i
, t) pu` o intendersi come rappresentazione locale di una funzione L: TQ
R R (di classe C
2
almeno), dove Q `e una variet` a dierenziabile di coordinate locali (q
i
).
Il funzionale
L
`e allora denito sullinsieme delle curve sopra la variet` a Q i cui intervalli
di denizione contengono lintervallo chiuso [t
1
, t
2
].
5.13. Il principio dellazione stazionaria 235
Teorema 5.13.1 Il funzionale dazione
L
`e dierenziabile e la sua variazione prima
`e
(5.162)
L
=
_
t
2
t
1
[L]
i
q
i
dt +
_
L
q
i
q
i
_
t
2
t
1
posto
(5.163) [L]
i
=
d
dt
L
q
i
L
q
i
.
Dimostrazione. Occorre far ricorso al teorema sulla derivazione delle funzioni integrali:
se
F(x) =
_
(x)
(x)
f(x, y)dy
allora
dF
dx
=
_
(x)
(x)
f
x
dy + f
_
x, (x)
_
(x) f
_
x, (x)
_
(x).
Applichiamo questa formula alla funzione F(), denita come nella (5.157) per il funzionale
(5.161):
F() =
_
t
2
t
1
L
_
t, q
i
+
i
, q
i
+
i
_
dt.
Siccome gli estremi dintegrazione sono ssi si ha semplicemente
dF
d
=
_
t
2
t
1
L
dt =
_
t
2
t
1
_
L
q
i
i
+
L
q
i
i
_
dt.
Valendo luguaglianza
L
q
i
i
=
d
dt
_
L
q
i
i
_
d
dt
_
L
q
i
_
i
,
risulta
_
dF
d
_
=0
=
_
t
2
t
1
_
L
q
i
d
dt
L
q
i
_
i
dt +
_
L
q
i
i
_
t
2
t
1
.
Di qui, moltiplicando per in accordo con la (5.160) e tenuto conto della (5.156), si ottiene
la (5.162). Si osservi che questo ragionamento non dipende dalla scelta della famiglia di
variazioni del tipo (5.156). 2
Definizione 5.13.1 Una variazione
_
q
i
(t)
_
si dice ad estremi ssi se q
i
(t
1
) =
q
i
(t
2
) = 0.
236 Capitolo 5. Meccanica lagrangiana
_
`
Figura 5.10: Variazioni ad estremi ssi () e no ().
Teorema 5.13.2 Le funzioni
_
q
i
(t)
_
per le quali si ha
(5.164)
L
= 0
per ogni variazione ad estremi ssi sono tutte e sole le soluzioni delle equazioni dierenziali
(5.165)
d
dt
_
L
q
i
_
L
q
i
= 0
Dimostrazione. Dalla (5.162) segue che per ogni variazione ad estremi ssi
L
=
_
t
2
t
1
[L]
i
q
i
dt.
`e ovvio che [L]
i
= 0 implica
L
= 0. Viceversa, se
L
= 0 per ogni q
i
, con q
i
(t
1
) =
q
i
(t
2
) = 0, allora necessariamente [L]
i
= 0 per ogni indice i. Infatti se fosse per esempio
[L]
1
positivo in un certo punto t
, quindi in tutto un suo intorno I
[t
1
, t
2
], prendendo
una variazione con q
2
= . . . = q
n
= 0 e q
1
funzione di classe C
1
non negativa con
supporto contenuto in I
, risulterebbe chiaramente
L
< 0 e non
L
= 0: assurdo. 2
Le curve q
i
(t) soddisfacenti al Teorema 5.13.2, quindi le soluzioni del sistema (5.165),
prendono il nome di estremali o punti critici del funzionale dazione
L
. Si dice anche
che esse rendono stazionario il funzionale.
`
E notevole il fatto che le equazioni (5.165) coincidono proprio con le equazioni di Euler-
Lagrange del sistema lagrangiano (Q, L). Si pu` o allora aermare che la dinamica di un
sistema lagrangiano `e costituita da tutte e sole le curve sulla variet` a Q che sono estremali
del funzionale
L
, per variazioni ad estremi ssi. Questa propriet` a, assunta come postulato
5.13. Il principio dellazione stazionaria 237
della meccanica, prende il nome di principio dellazione stazionaria (o anche della
minima azione).
Questo principio, sostituibile a quello di DAlembert-Lagrange nel caso di un sistema
olonomo a vincoli perfetti e soggetto a sollecitazioni attive dotate di potenziale (dove la
lagrangiana `e L = T + U), rientra in una classe di principi di stazionariet` a o di mini-
mo assunti a fondamento di molte teorie, per esempio il principio di Fermat per la
propagazione della luce.
18
Nota 5.13.1 Su di una variet` a riemanniana (Q, g) `e del tutto naturale considerare il
funzionale
(5.166)
G
=
_
t
2
t
1
_
g
ij
q
i
q
j
dt,
di lagrangiana
(5.167) G =
_
g
ij
q
i
q
j
.
Questo funzionale associa ad ogni curva parametrizzata su Q, denita in un intervallo
contenente [t
1
, t
2
], la lunghezza dellarco da essa descritto tra i due punti estremi corri-
spondenti ai valori t
1
e t
2
del parametro. Infatti G `e il modulo o lunghezza del vettore
tangente v = ( q
i
) alla curva. Chiamiamo geodetica ogni curva su Q estremale del fun-
zionale
G
. Le geodetiche sono dunque le curve a lunghezza stazionaria (eventualmente
minima) rispetto a curve prossime aventi gli stessi estremi. Esaminiamo il legame tra il
funzionale
G
ed il funzionale
(5.168)
T
=
1
2
_
t
2
t
1
g
ij
q
i
q
j
dt,
di lagrangiana
(5.169) T =
1
2
G
2
=
1
2
g
ij
q
i
q
j
.
Questa `e la lagrangiana dei moti spontanei di un sistema olonomo a vincoli indipendenti
dal tempo, cio`e di quei moti relizzati in assenza di forze attive (U = 0) per cui la lagran-
giana coincide con lenergia cinetica T (la quale a sua volta coincide con lenergia totale,
che `e costante di moto). Le condizioni di stazionariet` a
G
= 0 e
T
= 0 non sono equi-
valenti in senso stretto, poiche non producono le stesse curve estremali. Infatti, mentre
la lagrangiana T `e regolare e quindi produce equazioni di Euler-Lagrange soddisfacenti
al teorema di esistenza ed unicit` a, non lo `e invece la lagrangiana G, che `e una funzione
omogenea di grado 1 nelle velocit` a. La non unicit` a delle soluzioni, con posizione e velocit` a
iniziale assegnate, `e resa evidente dal fatto che lintegrale (5.166) `e invariante rispetto
alla parametrizzazione della curva, cio`e che la stessa traiettoria su Q pu` o essere percorsa,
sempre nellintervallo [t
1
, t
2
], con una qualunque legge temporale e quindi con una qua-
lunque velocit` a, senza per questo mutare lintegrale (5.166). Se ci si limita a considerare
18
Pierre de Fermat, 1601-1665.
238 Capitolo 5. Meccanica lagrangiana
le estremali percorse con velocit` a costante, cio`e se oltre alla condizione di stazionariet` a
G
= 0 si impone il vincolo
G =
_
g
ij
q
i
q
j
= costante,
allora le estremali di
G
coincidono con le estremali di
T
. Infatti le equazioni di Euler-
Lagrange corrispondenti a G sono
d
dt
g
ij
q
j
G
1
2G
i
g
hk
q
h
q
k
= 0.
Se si impone il vincolo della velocit` a costante si trovano le equazioni
d
dt
_
g
ij
q
j
_
1
2
i
g
hk
q
h
q
k
= 0,
che sono proprio le equazioni di Euler-Lagrange corrispondenti alla lagrangiana T e che si
riducono alle equazioni delle geodetiche.
5.14 Cenni di calcolo delle variazioni
Il Teorema 5.13.2 `e il teorema fondamentale del calcolo delle variazioni. Questo
teorema, insieme ad alcune sue varianti ed estensioni, `e infatti la base su cui poggia la
teoria dei massimi e minimi dei funzionali dazione (calcolo delle variazioni).
Accenniamo a due problemi classici risolti con tale calcolo, il problema degli isoperimetri e il
problema della catenaria. A questo scopo `e necessario lutilizzo di una variante al teorema
fondamentale, che tiene conto di una eventuale condizione supplementare, o vincolo, sulle
variazioni q
i
. Questo vincolo `e espresso dallinvarianza di un integrale del tipo
(5.170)
V
=
_
t
2
t
1
V (q
i
, q
i
, t) dt
quindi dalla condizione
(5.171)
V
= 0.
Si pu` o dimostrare che
Teorema 5.14.1 Le funzioni q
i
(t) che rendono stazionario un funzionale dazione
L
con variazioni ad estremi ssi soddisfacenti al vincolo (5.171) sono tutte e sole quelle che
rendono stazionario il funzionale dazione
L
associato alla lagrangiana
(5.172) L
= L + V,
dove `e un parametro reale costante, detto moltiplicatore di Lagrange.
5.14. Cenni di calcolo delle variazioni 239
Ci` o signica che il funzionale da considerarsi `e
(5.173)
L
=
L
+
V
,
e che quindi le equazioni di Euler-Lagrange sono
(5.174)
d
dt
L
q
i
L
q
i
= 0,
con la lagrangiana L
data dalla (5.172) e con la condizione d/dt = 0.
Questo teorema `e analogo al teorema, pure dovuto a Lagrange, sui massimi e mini-
mi vincolati o condizionati di una funzione reale a pi` u variabili: i punti di staziona-
riet` a (cio`e i punti critici) di una funzione F(x
) soddisfacenti ad unequazione di vincolo
V (x
) = 0 sono i punti critici della funzione F
= F + V , R. Una sua dimo-
strazione geometrica `e la seguente. Interpretata lequazione del vincolo come equazione
di una supercie S nello spazio delle (x
), la condizione di stazionariet` a condizionata si
traduce nella stazionariet` a della restrizione F[S della funzione F alla supercie S, cio`e
alla condizione v, dF) = 0 per ogni vettore v tangente a S, quindi per ogni vettore tale
che v, dV ) = 0. Ci` o equivale a dire che su ogni punto di S i dierenziali dF e dV (ovvero
i rispettivi gradienti) sono dipendenti (ovvero paralleli), cio`e che deve esistere un per
cui dF +dV = 0, ovvero d(F + V ) = 0, inteso d = 0.
Esempio 5.14.1 Il problema degli isoperimetri. Si vuole stabilire quali siano le
curve piane chiuse che a parit` a di lunghezza racchiudono aree massime. Per far questo
ci si pu` o limitare inizialmente a considerare il caso di una curva chiusa costituita da un
intervallo [x
1
, x
2
] sullasse x e dal graco di una funzione y = f(x) di classe C
2
, nulla agli
estremi. Il funzionale
L
da rendere stazionario `e quello dellarea,
L
=
_
x
2
x
1
y dx,
il quale quindi corrisponde alla lagrangiana
L(x, y, y
) = y.
Il vincolo `e rappresentato dalla costanza della lunghezza della curva cio`e del funzionale
V
=
_
x
2
x
1
ds =
_
x
2
x
1
_
1 +y
2
dx,
il quale corrisponde alla lagrangiana
V (x, y, y
) =
_
1 +y
2
.
Rispetto alle notazioni generali prima usate abbiamo nel caso presente n = 1, t = x
(variabile indipendente), q = y e q = v = y
. Si tratta quindi eettivamente di un
problema con variazioni vincolate ed a estremi ssi Figura 5.11 (a).
240 Capitolo 5. Meccanica lagrangiana
_
`
(a) (b)
Figura 5.11: Il problema degli isoperimetri.
La lagrangiana da considerarsi `e allora
L
= y +
_
1 +y
2
e lequazione di Euler-Lagrange `e di conseguenza
d
dx
L
y
=
d
dx
y
_
1 +y
2
1 = 0.
Posto c =
1
, segue che
y
_
1 + y
2
= cx,
modulo una costante additiva, che riteniamo nulla, alla quale corrisponde una inessenziale
traslazione lungo lasse x. Dalla formula precedente segue
y
=
cx
1 c
2
x
2
,
quindi, con semplice integrazione,
y = b
1
c
_
1 c
2
x
2
, b R.
Elevando al quadrato si conclude che la curva cercata ha equazione
(y b)
2
+x
2
=
2
.
Si tratta di una circonferenza di raggio Figura 5.11 (b). Abbiamo allora dimostrato
che le curve che risolvono il problema degli isoperimetri sono gli archi di circonferenza, in
particolare che le curve regolari chiuse del piano che a parit` a di lunghezza racchiudono
larea maggiore sono le circonferenze.
5.14. Cenni di calcolo delle variazioni 241
Esempio 5.14.2 La catenaria. Si vuole stabilire quale sia la curva descritta da un
cavo inestendibile e omogeneo (per esempio una catena sottile) appeso a due estremi ssi,
in equilibrio sotto la sola azione della forza peso. Si tratta di un classico problema di
statica. Si pu` o far ricorso al principio di Torricelli
19
secondo il quale in condizioni
di equilibrio il baricentro della catena occupa la pi` u bassa posizione possibile. Questo
principio si traduce nellequazione variazionale
z
G
= 0.
La quota z
G
del baricentro `e il funzionale (la catena `e supposta omogenea e di massa
unitaria)
z
G
=
L
=
_
x
2
x
1
z ds =
_
x
2
x
1
z
_
1 + z
2
dx
corrispondente alla lagrangiana
L(x, z, z
) = z
_
1 + z
2
,
considerata la curva z = z(x) descritta dalla catena sul piano (x, z) di asse verticale z. Il
vincolo `e ancora rappresentato dallinvarianza della lunghezza, quindi del tipo considerato
nellesempio precedente. Dunque la lagrangiana del problema `e
L
= (z +)
_
1 +z
2
.
Tuttavia, con la sostituzione z + z corrispondente ad una traslazione verticale, ci si
riduce a considerare la lagrangiana
L
= z
_
1 +z
2
la cui equazione di Euler-Lagrange `e
d
dx
L
z
=
d
dx
_
zz
_
1 + z
2
_
_
1 +z
2
= 0.
Appare evidente la soluzione
z =
1
a
cosh a(x b),
perche `e
1 +z
2
= 1 + sinh
2
a(x b) = cosh
2
a(x b) = a
2
z
2
e quindi
zz
_
1 + z
2
=
1
a
z
,
per cui lequazione dierenziale `e chiaramente soddisfatta. Tenendo conto che `e sempre
disponibile una traslazione verticale, le curve estremali del problema variazionale originario
sono le funzioni
z =
1
a
cosh a(x b) .
Le costanti (a, b, ) devono determinarsi assegnate le posizione degli estremi della catena.
`e comunque dimostrato che la catenaria `e un arco di coseno iperbolico.
19
Evangelista Torricelli, 1608-1647.
242 Capitolo 5. Meccanica lagrangiana
5.15 Equilibrio e stabilit`a
Le considerazioni generali svolte al 1.15 sulla stabilit` a dei punti critici (o punti singolari) di
un campo vettoriale su di uno spazio ane, avendo carattere locale, possono adattarsi
al caso di un campo vettoriale lagrangiano X
L
corrispondente ad un sistema olonomo
conservativo, le cui equazioni del primo ordine sono del tipo
(5.175)
_
_
dq
i
dt
= q
i
,
d q
i
dt
= F
i
i
hj
q
h
q
j
,
con
(5.176) F
i
= g
ij
j
U.
I punti critici di X
L
sono i punti di TQ in cui X
L
= 0 e quindi i punti in cui si annullano
simultaneamente i secondi membri del sistema (5.175). Essi sono pertanto caratterizzati
dalle condizioni
(5.177) F
i
= 0, q
i
= 0.
Si pu` o allora aermare che:
Teorema 5.15.1 I punti critici del campo lagrangiano X
L
sono gli atti di moto nulli
corrispondenti alle congurazioni in cui si annullano le forze lagrangiane.
Per quanto visto al 1.15, segue che se il sistema si trova inizialmente nelle condizioni
(5.177) vi resta indenitamente. `e allora naturale dare la
Definizione 5.15.1 Una congurazione q
0
Q `e congurazione di equilibrio se,
posto il sistema in quella congurazione con atto di moto nullo (cio`e con tutti i suoi punti
a velocit` a nulla), esso vi permane indenitamente.
Risulta di conseguenza dimostrato che:
Teorema 5.15.2 Una congurazione q
0
Q `e di equilibrio se e solo se in essa si
annullano le forze lagrangiane, ovvero se e solo se `e punto critico (o di stazionariet` a)
del potenziale: dU(q
0
) = 0.
Per giusticare questa seconda parte dellenunciato va osservato che F
i
= 0 equivale a
(5.178)
U
q
i
= 0.
Le congurazioni di equilibrio si determinano pertanto risolvendo il sistema di n equazioni
algebriche (5.178): ogni n-pla (q
i
0
) che lo soddisfa rappresenta una congurazione di
equilibrio.
Adattiamo ora al caso di un sistema olonomo (del tipo qui considerato) la nozione di
stabilit` a data dalla Denizione 1.15.1.
5.15. Equilibrio e stabilit`a 243
Definizione 5.15.2 Una congurazione q
0
Q `e di equilibrio stabile (risp. insta-
bile) se il corrispondente atto di moto nullo `e punto critico stabile (risp. instabile) del
campo X
L
.
La stabilit` a di una congurazione di equilibrio pu` o essere riconosciuta attraverso il teo-
rema di Lagrange-Dirichlet:
20
Teorema 5.15.3 Una congurazione di equilibrio `e stabile se in essa il potenziale U ha
un massimo locale in senso stretto (ovvero se lenergia potenziale V = U ha un minimo
locale in senso stretto).
Dimostrazione. Si pu` o applicare il criterio di Lyapunov al punto critico del campo X
L
,
corrispondente allatto di moto nullo nella congurazione q
0
considerata, prendendo come
funzione di Lyapunov lenergia totale E = T U = T +V , che `e un integrale primo (Nota
1.15.1). Se infatti in q
0
lenergia potenziale V ha un minimo stretto, supposto V (q
0
) = 0,
nellintorno di q
0
(escluso q
0
) si ha V > 0. Per latto di moto nullo si ha ovviamente T = 0,
quindi nel suo intorno si ha E = V +T > 0 non potendo essere lenergia cinetica negativa.
Pertanto E ha un minimo stretto. 2
Si noti che la condizione di massimo stretto del potenziale `e una condizione solo sucien-
te per la stabilit` a. Per ottenere una condizione necessaria, e quindi invertire il teorema,
occorre aggiungere ulteriori ipotesi sul potenziale. Tra i vari criteri di instabilit` a o teo-
remi inversi di Lagrange-Dirichlet che sono stati dimostrati va ricordato il criterio di
instabilit` a di Cetaiev (1930):
Teorema 5.15.4 Se una congurazione di equilibrio non `e di massimo stretto del po-
tenziale e se tale fatto `e riconoscibile dallanalisi dei valori delle derivate parziali del
potenziale in quella congurazione allora lequilibrio `e instabile.
21
Per applicare questo criterio occorre osservare che il carattere di un punto stazionario
di una funzione (cio`e lessere un minimo o un massimo o una sella) `e in genere deducibile
dallanalisi del suo sviluppo di Taylor in quel punto, quindi in prima istanza dalle sue
derivate seconde (le derivate prime sono nulle)
(5.179) H
ij
=
_
2
U
q
i
q
j
_
q
0
Queste formano una matrice simmetrica, detta matrice hessiana, e quindi denisco-
no una forma quadratica H, dalla cui segnatura (p, q) `e possibile, salvo in un caso,
determinare il carattere della congurazione di equilibrio:
20
Gustav Peter Lejeune Dirichlet, 1805-1859.
21
Come precisato da studi recenti dei matematici russi Koslov e Palamodov, si richiede la riconoscibilit`a
dellesistenza del minimo stretto dallanalisi del primo termine omogeneo non identicamente nullo dello
sviluppo di Taylor del potenziale.
244 Capitolo 5. Meccanica lagrangiana
(a) Se la segnatura `e (n, 0), cio`e se la forma quadratica `e denita positiva, si ha in q
0
un
minimo locale stretto del potenziale e di conseguenza lequilibrio `e instabile per il criterio
di Cetaiev.
(b) Se la segnatura `e (0, n), cio`e se la forma quadratica `e denita negativa, si ha un
massimo locale stretto e lequilibrio `e stabile per il criterio di Lagrange-Dirichlet.
(c) Se la segnatura `e (p, q) con p e q non entrambi nulli non si ha ne massimo ne minimo
(`e indierente il fatto che la matrice [H
ij
] sia o no singolare) e lequilibrio `e instabile per
il criterio di Cetaiev.
(d) Se la matrice hessiana `e singolare (H = det[H
ij
] = 0) e la segnatura `e (p, 0) o (0, q),
allora occorre passare allesame delle derivate parziali di ordine superiore.
Nota 5.15.1 Calcolo della segnatura di una forma quadratica. La segnatura di
una forma quadratica si pu` o facilmente calcolare col metodo seguente. Data la matrice
quadrata H
n
= [H
ij
] delle sue componenti rispetto ad una qualunque base, si sceglie
una qualunque successione (H
1
, H
2
, . . . , H
n1
) di sue sottomatrici quadrate principali
di ordine crescente da 1 a n 1, ciascuna contenuta nella successiva (una sottomatrice
quadrata `e principale se la sua diagonale principale `e contenuta nella diagonale principale
della matrice completa H
n
). Si esamina quindi la successione degli n + 1 numeri
(5.180) 1, H
1
, det H
2
, . . . , det H
n1
, det H
n
.
Allora il numero q della segnatura (p, q) di H (vale a dire il numero dei vettori a norma
negativa in una base canonica rispetto a H) `e uguale al numero delle variazioni di segno
degli elementi di questa successione, dalla quale vanno tolti gli eventuali zeri. Il numero
p (dei vettori a norma positiva di una base canonica) si trae dalluguaglianza p + q = r
dove r `e il rango della matrice H
n
, cio`e il massimo ordine delle sue sottomatrici quadrate
a determinante non nullo. Pu` o accadere che la matrice hessiana [H
ij
] risulti diagonale,
cio`e che si abbia H
ij
= 0 per i ,= j. Allora la segnatura (p, q) `e data dal numero p degli
elementi H
ii
positivi e dal numero q di quelli negativi.
5.16 Piccole oscillazioni nellintorno di una congurazione
di equilibrio stabile
Si consideri una congurazione di equilibrio stabile q
0
, in cui il potenziale ha un massimo
stretto, con matrice hessiana regolare, det[H
ij
] ,= 0. Questa condizione di regolarit` a
non dipende dalla scelta delle coordinate (q
i
) nellintorno di q
0
. Si supponga inoltre il
potenziale U di classe C
3
almeno, nellintorno di q
0
. In questo caso diciamo che q
0
`e una
congurazione di equilibrio stabile regolare o non degenere. Nellambito della teoria
delle vibrazioni la matrice [H
ij
] viene chiamata matrice di rigidezza. Se le coordinate
lagrangiane sono scelte in modo da annullarsi tutte in q
0
e se inoltre si pone U(q
0
) = 0,
allora per la formula di Taylor (con resto di Lagrange) il potenziale U `e approssimabile
nellintorno di q
0
dal polinomio di secondo grado omogeneo nelle (q
i
)
(5.181)
U =
1
2
H
ij
q
i
q
j
.
5.16. Piccole oscillazioni nellintorno di una congurazione di equilibrio stabile 245
(in q
0
si annullano anche le derivate prime di U), a valori sempre negativi (salvo che per
le q
i
tutte nulle). Per lenergia cinetica si pu` o daltra parte considerare lapprossimazione
(5.182) T =
T +. . . =
1
2
M
ij
q
i
q
j
+ . . . ,
posto
(5.183) M
ij
= g
ij
(q
0
).
Alla matrice quadrata simmetrica [M
ij
], chiamata matrice di massa, corrisponde una
forma quadratica M denita positiva (lenergia cinetica nella congurazione q
0
). Con
le approssimazioni (5.181) e (5.182) del potenziale e dellenergia cinetica le equazioni di
Lagrange si riducono a
(5.184) M
ij
q
j
H
ij
q
j
= 0.
Si noti bene che le matrici [M
ij
] e [H
ij
] sono costanti. Queste equazioni prendono il nome
di equazioni di Lagrange linearizzate nella congurazione di equilibrio q
0
. Le sue
soluzioni descrivono le cosiddette piccole oscillazioni del sistema nellintorno della con-
gurazione di equilibrio stabile. Anche se la questione richiederebbe unanalisi rigorosa, `e
intuibile che queste soluzioni sono tanto pi` u vicine alle soluzioni esatte (cio`e delle equa-
zioni di Lagrange non linearizzate) quanto pi` u piccoli sono i valori iniziali dellenergia
cinetica e delle coordinate. Il sistema di equazioni dierenziali (5.184) si pu` o integrare
trasformandolo con un opportuno cambiamento di coordinate in un sistema di n equazioni
separate, coinvolgenti cio`e ciascuna una singola coordinata. Il procedimento di trasfor-
mazione `e suggerito dalla teoria delle forme bilineari negli spazi euclidei. Si consideri il
sistema di equazioni agli autovettori
(5.185)
_
H
ij
x M
ij
_
v
j
= 0
e la corrispondente equazione caratteristica
(5.186) det
_
H
ij
x M
ij
= 0.
Per il teorema sulle forme bilineari simmetriche negli spazi strettamente euclidei (qui la
matrice di massa svolge il ruolo di tensore metrico), essendo la forma quadratica H denita
negativa, lequazione caratteristica (5.186) ammette n radici reali negative (
1
,
2
, . . . ,
n
).
Risultano allora determinati n numeri positivi (
1
,
2
, . . . ,
n
), detti pulsazioni proprie
o caratteristiche, tali che
(5.187)
1
=
2
1
,
2
=
2
2
, . . . ,
n
=
2
n
.
Per ogni autovalore
k
si consideri un corrispondente autovettore v
k
. Le sue componenti
(v
j
k
) sono soluzioni del sistema
(5.188)
_
H
ij
k
M
ij
_
v
j
k
= 0.
246 Capitolo 5. Meccanica lagrangiana
In tal modo si pu` o costruire una base di autovettori (v
1
, v
2
, . . . , v
n
). Lindipendenza di
questi autovettori equivale alla regolarit` a della matrice delle componenti [v
j
k
]: det[v
j
k
] ,= 0.
Ci` o posto, si considerino nuove coordinate (s
i
) legate alle (q
i
) dalle relazioni lineari
(invertibili)
(5.189) q
j
= v
j
k
s
k
.
Tenuto conto della (5.188) si ha
_
M
ij
q
j
= M
ij
v
j
k
s
k
,
H
ij
q
j
= H
ij
v
j
k
s
k
=
k
M
ij
v
j
k
s
k
,
e le equazioni di Lagrange linearizzate (5.184) diventano
(5.190) M
ij
v
j
k
_
s
k
k
s
k
_
= 0.
Poiche
det[M
ij
v
j
k
] = det[M
ij
] det[v
j
k
] ,= 0,
il sistema di equazioni (5.190) `e equivalente alle n equazioni separate
(5.191) s
k
+
2
k
s
k
= 0 (k indice non sommato)
ciascuna coinvolgente una sola funzione incognita s
k
. Ognuna di queste `e unequazione
del moto armonico ed ammette un integrale generale del tipo
(5.192) s
k
(t) = A
k
sin(
k
t +
k
),
con A
k
e
k
costanti arbitrarie (ampiezza e fase). In conclusione:
Teorema 5.16.1 I moti di un sistema olonomo conservativo nellintorno di una con-
gurazione di equilibrio stabile regolare sono la composizione di n moti armonici secondo le
autodirezioni della matrice di rigidezza rispetto alla matrice di massa, con pulsazioni date
dalle radici quadrate dei valori assoluti degli autovalori.
Le autodirezioni vengono anche dette modi.
Capitolo 6
Meccanica hamiltoniana
_
La meccanica hamiltoniana `e la naturale evoluzione della meccanica lagrangiana.
Trae le sue origini dagli studi di ottica geometrica di William Rowan Hamilton
(1805-1865) e dallopera di Simeon Denis Poisson (1781-1840), Carl Gustav Jacob
Jacobi (1804-1851) e Joseph Liouville (1809-1882), sviluppandosi no ai nostri
giorni con un cospicuo corredo di risultati raggiunti e di problematiche aperte.
Mentre la meccanica lagrangiana opera sulle variet` a delle congurazioni dei siste-
mi olonomi e sui corrispondenti brati tangenti, consentendo tra laltro di inter-
pretare le equazioni della dinamica dei sistemi olonomi come naturale estensione
alle variet` a riemanniane delle equazioni della dinamica del punto nello spazio eu-
clideo, la meccanica hamiltoniana opera invece inizialmente sui brati cotangenti
delle variet` a delle congurazioni, avvalendonsi della struttura simplettica cano-
nica posseduta da questi brati, estendendo successivamente il suo interesse alle
pi` u generali variet` a simplettiche.
Le equazioni dinamiche di Lagrange vengono sostituite da un sistema di 2n equa-
zioni dierenziali ordinarie del primo ordine, le equazioni di Hamilton, o, in alter-
nativa, da una sola equazione alle derivate parziali del primo ordine: lequazione di
Hamilton-Jacobi. Queste equazioni possiedono un notevole signicato intrinseco-
geometrico, dovuto proprio alla presenza della struttura simplettica, grazie alla
quale si sviluppano nuovi metodi di analisi e di integrazione.
Il modello hamiltoniano della meccanica propone dunque concetti e metodi di vasta
portata, che giungono ad interessare altri importanti settori della sica matemati-
ca, quali lottica geometrica, la meccanica statistica, la meccanica quantistica. In
questo capitolo ne saranno tratteggiati alcuni degli elementi fondamentali.
247
248 Capitolo 6. Meccanica hamiltoniana
6.1 Fibrati cotangenti e sistemi hamiltoniani
Parallelamente al concetto di vettore tangente ad una variet` a si pu` o introdurre il concetto
duale di covettore tangente. Come per i vettori, per i covettori si possono dare varie
denizioni.
Definizione 6.1.1 Un covettore tangente in un punto q di una variet` a Q `e una
classe di equivalenza di funzioni su Q. Due funzioni f e f
si dicono equivalenti
(al primo ordine) in un punto q se, comunque si prenda una curva : I Q basata in q
(quindi tale che (0) = q), si ha
(6.1) D(f )(0) = D(f
)(0).
Si noti che questa denizione `e analoga a quella di vettore tangente come classe di equiva-
lenza di curve. La denizione seguente si basa invece sulla preesistente nozione di vettore
tangente.
Definizione 6.1.2 Un covettore tangente p in un punto q di una variet` a Q `e un
elemento del duale dello spazio tangente T
q
Q, vale a dire unapplicazione lineare p: T
q
Q
R. Si denota con T
q
Q lo spazio duale di T
q
Q, detto spazio cotangente a Q in q.
Il legame tra queste due denizioni passa attraverso il concetto di dierenziale di una
funzione f in un punto q Q: `e lapplicazione lineare d
q
f : T
q
Q R denita da
(6.2) [], d
q
f) = D(f )(0),
ovvero da
(6.3) v, d
q
f) = v(f),
a seconda che si consideri il vettore tangente come classe di equivalenza di curve o come
derivazione. Dal confronto della (6.1) con la (6.2) si vede che due funzioni appartenenti alla
stessa classe di equivalenza hanno lo stesso dierenziale. Pertanto d
q
f si identica con la
classe di equivalenza di funzioni determinata da f. I dierenziali d
q
f formano ovviamente
un sottospazio di T
q
Q, osservato che d
q
f + d
q
f
= d
q
(f + f
) e che ad
q
f = d
q
(af),
con a R. Se inoltre su Q (di dimensione n) si prende un sistema di coordinate (q
i
)
(i = 1, . . . , n) nellintorno di q, si osserva che gli n dierenziali d
q
q
i
formano una base per
questo sottospazio, che pertanto coincide con tutto lo spazio duale T
q
Q.
Lintervento di coordinate porta inne a considerare una terza denizione di covettore,
analoga alla Denizione 5.2.3 per i vettori tangenti:
Definizione 6.1.3 Un covettore tangente in un punto q di una variet` a Q `e una
classe di equivalenza di coordinate e componenti cio`e di coppie
(q
i
, p
i
)
6.1. Fibrati cotangenti e sistemi hamiltoniani 249
costituite da un sistema di coordinate (q
i
) nellintorno del punto q e da un insieme di n
numeri (p
i
). Due coppie siatte (q
i
, p
i
) e (q
i
, p
i
) si dicono equivalenti se sussistono i
legami
(6.4) p
i
=
_
q
i
q
i
_
q
p
i
.
I numeri (p
i
) si dicono componenti del covettore secondo le coordinate (q
i
).
Il legame con la Def. 2, secondo la quale un covettore p `e una forma lineare sui vettori, `e
dato dalla formula
(6.5) v, p) = p
i
v
i
,
dove le v
i
sono le componenti di v. Il legame con la Def. 1 `e invece espresso dal fatto che
la scrittura p = d
q
f equivale a
(6.6) p
i
=
_
f
q
i
_
q
.
Anche linsieme di tutti i covettori tangenti a Q, denotato con T
Q e chiamato brato
cotangente, `e una variet` a dierenziabile di dimensione 2n. La dimostrazione `e analoga
a quella svolta per il brato tangente. Infatti ad ogni sistema di coordinate (q
i
) su di un
dominio aperto U Q corrisponde un sistema di coordinate (q
i
, p
i
) sullinsieme T
U
T
Q dei covettori tangenti nei punti di U, dette coordinate canoniche naturali, denite
alla maniera seguente: se q U e p T
q
U allora le (q
i
) sono le coordinate del punto q e le
(p
i
) sono le componenti del covettore p, cio`e i numeri deniti dalla (6.5). Le (p
i
) vengono
anche dette momenti o impulsi corrispondenti alle coordinate di congurazione (q
i
)
(si tratta di una terminologia legata al loro signicato meccanico). Si osserva allora che
passando da un sistema di coordinate (q
i
) ad un altro (q
i
) le coordinate (p
i
) e (p
i
) sono
legate da una relazione analoga alla (6.4)
1
(6.7) p
i
=
q
i
q
i
p
i
.
Di qui segue che carte compatibili su Q generano carte compatibili su T
Q e quindi che
T
Q `e una variet` a dierenziabile. Ogni spazio cotangente T
q
Q costituisce una bra del
brato cotangente T
Q. Ogni bra `e una sottovariet` a di dimensione n.
Come si vedr` a nei prossimi paragra, limportanza della struttura di brato cotangente
in meccanica `e dovuta essenzialmente alla cicostanza che ad ogni funzione dierenzia-
bile H: T
Q R su di un brato cotangente corrisponde un campo vettoriale X
H
su
1
Va osservato che a secondo membro di questa equazione le derivate parziali q
i
/q
i
sono in prima istanza
funzioni delle (q
i
). Occorre quindi risostituire a queste le loro espressioni in funzione delle (q
i
) per avere
in denitiva a secondo membro una funzione delle (q
i
, p
i
).
250 Capitolo 6. Meccanica hamiltoniana
T
Q, detto campo hamiltoniano o sistema dinamico hamiltoniano generato dalla
hamiltoniana H, le cui equazioni dierenziali sono
(6.8)
_
_
dq
i
dt
=
H
p
i
dp
i
dt
=
H
q
i
Queste prendono il nome di equazioni di Hamilton o equazioni canoniche.
Vediamo come questa corrispondenza venga realizzata, dando del campo X
H
una deni-
zione intrinseca, indipendente dalluso di coordinate. A questo scopo si comincia con los-
servare che in coordinate canoniche naturali (q
i
, p
i
) una generica 1-forma su T
Q ammette
una rappresentazione del tipo
(6.9) =
i
dq
i
+
i
dp
i
,
con le componenti (
i
,
i
) espresse mediante funzioni di queste coordinate. Se si scelgono
come componenti le funzioni
i
= p
i
e
i
= 0 si ottiene una 1-forma particolare
(6.10) = p
i
dq
i
che ha carattere intrinseco, detta forma di Liouville o forma fondamentale di T
Q.
Lindipendenza dalla scelta delle coordinate di questa denizione segue immediatamente
dalla (6.7):
p
i
dq
i
= p
i
q
i
q
i
dq
i
= p
i
dq
i
.
Il carattere intrinseco della forma di Liouville (6.10) implica anche il carattere intrinseco
del suo dierenziale
(6.11) = d = dp
i
dq
i
Questa 2-forma prende il nome di forma simplettica canonica su T
Q. Abbiamo
dunque dimostrato che ogni brato cotangente possiede per sua stessa natura una 1-forma
ed una 2-forma particolari.
Osserviamo ora che un generico campo vettoriale X sul brato cotangente T
Q, inteso
come derivazione, ammette una rappresentazione del tipo
(6.12) X = X
i
q
i
+ X
i
p
i
,
dove le componenti (X
i
, X
i
) sono funzioni delle stesse coordinate (q
i
, p
i
). Usando la pi` u
comoda notazione
i
=
q
i
,
i
=
p
i
,
6.1. Fibrati cotangenti e sistemi hamiltoniani 251
la (6.12) pu` o scriversi
(6.13) X = X
i
i
+ X
i
i
.
Se interpretato come sezione X: T
Q TT
Q del brato tangente del brato cotangente
T
Q, il campo X ammette una rappresentazione del tipo
(6.14) q
i
= X
i
, p
i
= X
i
,
denotate con (q
i
, p
i
, q
i
, p
i
) le coordinate su TT
Q indotte dalle coordinate (q
i
, p
i
) su T
Q.
Ci` o posto, il valore assunto dalla forma simplettica su di una coppia di campi vettoriali
(X, Y ) `e
(6.15)
(X, Y ) = (dp
i
dq
i
)(X, Y )
= X, dp
i
)Y , dq
i
) X, dq
i
)Y , dp
i
)
= X
i
Y
i
X
i
Y
i
.
Si osserva allora che se si ssa il campo X e si fa variare Y si ottiene unapplicazione
lineare dai campi vettoriali alle funzioni su T
Q,
(X, ) : Y (X, Y )
vale a dire una 1-forma dierenziale su T
Q. Per la (6.15) questa 1-forma ammette la
rappresentazione
(6.16) (X, ) = X
i
dq
i
X
i
dp
i
Sulla base di queste considerazioni possiamo dimostrare che
Teorema 6.1.1 Per ogni funzione dierenziabile H: T
Q R lequazione
(6.17) (X
H
, ) = dH
denisce un campo vettoriale X
H
su T
Q le cui equazioni dierenziali del primo ordine
in coordinate canoniche naturali (q
i
, p
i
) sono le equazioni di Hamilton (6.8).
Dimostrazione. Scritto il dierenziale di H,
(6.18) dH =
i
H dq
i
+
i
H dp
i
e tenuto conto della (6.16), scritta per X = X
H
, la denizione (6.17) equivale allugua-
glianza delle forme dierenziali
X
i
dq
i
X
i
dp
i
=
i
H dq
i
i
H dp
i
,
da cui seguono le uguaglianze
(6.19) X
i
=
i
H, X
i
=
i
H.
Di qui, tenuto conto delle (6.12), si vede che il sistema dierenziale associato al campo
X
H
coincide proprio con il sistema (6.8), cio`e con le equazioni di Hamilton. 2
252 Capitolo 6. Meccanica hamiltoniana
Nota 6.1.1 Si vede dalla (6.11) che la matrice delle componenti della forma simplettica
nelle coordinate (q
i
, p
i
) `e la matrice antisimmetrica di ordine 2n
(6.20) J =
_
0
n
1
n
1
n
0
n
_
detta matrice simplettica, composta da quattro sottomatrici quadrate di ordine n, di cui
due nulle (le diagonali), una unitaria ed una antiunitaria.
2
Sviluppando il determinante
di questa matrice secondo le prime n righe con la regola di Laplace si vede che, qualunque
sia la dimensione n, `e
(6.21) det J = 1.
La forma simplettica `e dunque regolare. Si osserva inoltre che il quadrato della matrice
simplettica `e lopposto della matrice unitaria:
(6.22) J
2
= 1
2n
.
6.2 La trasformata di Legendre
Alla formulazione lagrangiana delle equazioni della meccanica corrisponde una formulazio-
ne hamiltoniana equivalente, costruita sui brati cotangenti anziche sui brati tangenti.
Il legame tra le due formulazioni prende il nome di trasformazione di Legendre
3
ed `e
costruito alla maniera seguente.
Si consideri un sistema dinamico lagrangiano (Q, L) con lagrangiana L indipendente dal
tempo L: TQ R e regolare,
4
cio`e tale che
(6.23) det
_
2
L
q
i
q
j
_
,= 0
La condizione di regolarit` a della lagrangiana implica due fatti importanti: primo, come
si `e visto nella Nota 5.8.3, che la dinamica `e rappresentata da un campo lagrangiano X
L
sopra la variet` a TQ e, secondo, che esiste un dieomorsmo
L
: TQ T
Q
2
In alcuni testi, in base a convenzioni diverse da quelle qui adottate, per matrice simplettica sintende la
matrice opposta alla (6.20).
3
Adrien-Marie Legendre, 1752-1833.
4
Ci limitiamo qui e nel seguito a considerare sistemi dinamici lagrangiani e hamiltoniani indipendenti dal
tempo, che del resto sono i pi` u comuni nelle applicazioni. Il caso tempo-dipendente, il cui interesse `e
comunque rilevante, richiederebbe unanalisi molto pi` u ampia. Per quel che riguarda il particolare la
trasformazione di Legendre va detto che la descrizione qui data, che `e quella classica, non ne rivela la
vera essenza. La sua denizione generale `e infatti indipendente dallassegnazione di una lagrangiana e si
basa invece sulla particolare struttura posseduta dalle variet`a del tipo TT
Q, oggetto di studi relativamente
recenti.
6.2. La trasformata di Legendre 253
tra il brato tangente ed il brato cotangente, conservante le bre, cio`e tale che ad un
vettore tangente in un punto q Q corrisponde un covettore tangente nello stesso punto.
Questo dieomorsmo `e denito dalle equazioni
(6.24) p
i
=
L
q
i
Con queste equazioni infatti le coordinate p
i
risultano espresse come funzioni delle coordi-
nate (q
i
, q
i
), per cui `e denita unapplicazione da TQ a T
Q.
5
La condizione di regolarit` a
(6.23) `e necessaria e suciente per linvertibilit` a di questapplicazione, cio`e alla possibilit` a
di esprimere le coordinate ( q
i
) come funzioni delle coordinate (q
i
, p
i
).
In eetti le equazioni (6.24) generano solo un dieomorsmo locale tra TQ e T
Q. La
lagrangiana L si dice iper-regolare se con la combinazione di questi dieomorsmi locali si
genera un dieomorsmo globale
L
tra TQe T
Q. Se allora si `e in queste condizioni, come
nel caso di un sistema olonomo (si veda la Nota 6.2.1 a ne paragrafo), il campo lagrangiano
X
L
sopra TQ si trasforma tramite questo dieomorsmo in un campo vettoriale sopra
T
Q. Il fatto notevole `e che questo campo `e hamiltoniano, come mostrato dal teorema
seguente:
Teorema 6.2.1 Il campo vettoriale su T
Q corrispondente a X
L
mediante il dieo-
morsmo
L
6
`e un campo hamiltoniano X
H
con hamiltoniana H denita da
(6.25) H(q
, p
) = p
i
q
i
L(q
, q
)
dove le q
devono intendersi funzioni delle (q
, p
) per il tramite delle relazioni inverse
delle (6.2).
Dimostrazione. Si consideri il dierenziale della funzione H denita dalla (6.25):
dH = dp
i
q
i
+ p
i
d q
i
L
q
i
dq
i
L
q
i
d q
i
.
Lintervento di
L
, cio`e delle (6.24), annulla i coecienti di d q
i
, sicche risulta
dH = q
i
dp
i
L
q
i
dq
i
.
5
Si noti la diversa interpretazione delle equazioni (6.24) e delle analoghe equazioni (5.152). Qui le (6.24)
deniscono unapplicazione tra la variet`a TQ di coordinate (q
i
, q
i
) e la variet`a T
Q di coordinate (q
i
, pi).
Le equazioni (5.152) deniscono invece delle funzioni su TQ (oppure su TQR nel caso di una lagrangiana
t-dipendente).
6
In generale, dato un dieomeorsmo : M N tra due variet`a, ad ogni campo vettoriale X su M
corrisponde un campo vettoriale Y su N ottenuto attraverso la cosiddetta applicazione tangente
T: TM TN. Intendendo i vettori tangenti come classi di equivalenza di curve, questa applicazio-
ne `e denita dalluguaglianza T([]) = [ ]. Il campo vettoriale Y : N TN `e la composizione
T X
1
. Se `e localmente rappresentata da equazioni (invertibili) del tipo y
a
=
a
(x
i
) allora le
componenti di Y sono date da
Y
a
=
y
a
x
i
X
i
.
Lapplicazione T `e anche detta dierenziale di .
254 Capitolo 6. Meccanica hamiltoniana
Ci` o signica che
(6.26)
_
_
H
q
i
=
L
q
i
,
H
p
i
= q
i
,
Si osserva daltra parte che le equazioni di Euler-Lagrange possono porsi nella forma
(6.27)
_
_
dq
i
dt
= q
i
,
dp
i
dt
=
L
q
i
.
Quindi, grazie alle (6.26), esse sono equivalenti alle equazioni di Hamilton
(6.28)
_
_
dq
i
dt
=
H
p
i
,
dp
i
dt
=
H
q
i
. 2
Nota 6.2.1 Applichiamo le considerazioni precedenti al caso fondamentale di un sistema
olonomo conservativo, la cui lagrangiana `e
(6.29) L = T +U =
1
2
g
ij
q
i
q
j
+ U(q
).
Le equazioni (6.24) che deniscono
L
diventano
(6.30) p
i
= g
ij
q
j
e si invertono nelle equazioni
(6.31) q
i
= g
ij
p
j
che rappresentano invece
1
L
. In questo caso dunque
L
`e un dieomorsmo globale e la
lagrangiana L `e iper-regolare. Per le (6.30) e le (6.31)
T =
1
2
p
i
q
i
=
1
2
g
ij
p
i
p
j
,
e lhamiltoniana denita dalla (6.25) diventa
(6.32) H =
1
2
g
ij
p
i
p
j
U(q
i
)
Di qui seguono le quazioni di Hamilton:
(6.33)
_
_
dq
i
dt
= g
ij
p
j
,
dp
i
dt
=
U
q
i
1
2
g
hj
q
i
p
h
p
j
.
Si vede dalla (6.32) che lhamiltoniana coincide con la trasformata tramite
L
dellenergia
totale E = T U, a conferma del fatto che lhamiltoniana `e un integrale primo.
6.3. Il metodo di Jacobi 255
6.3 Il metodo di Jacobi
Uno dei vantaggi principali dellapproccio lagrangiano `e la totale libert` a di scelta delle
coordinate (q
i
) sulla variet` a delle congurazioni Q. La formulazione hamiltoniana amplia
ulteriormente le possibilit` a di scelta delle coordinate perche la dinamica `e sintetizzata
in un campo vettoriale X
H
sul brato cotangente T
Q, alla cui denizione concorre un
elemento intrinseco proprio di tale variet` a: la forma simplettica . Questo campo `e infatti
denito dallequazione
(6.34) (X
H
, ) = dH
In questo contesto `e allora del tutto arbitraria la scelta delle coordinate su T
Q, non solo
su Q. Tuttavia, un ruolo primario e privilegiato `e svolto dalle coordinate canoniche.
Definizione 6.3.1 Un sistema di coordinate (b
i
, a
i
) su T
Q `e canonico se in queste
coordinate la 2-forma simplettica canonica assume la forma
(6.35) = da
i
db
i
Va subito osservato che le coordinate canoniche naturali (q
i
, p
i
) corrispondenti a coordinate
(q
i
) su Q sono coordinate canoniche nel senso ora dato perche = dp
i
dq
i
. Tuttavia,
come si avr` a modo di osservare nel seguito, esistono sistemi di coordinate canoniche (b
i
, a
i
)
dove le prime n coordinate non sono coordinate di congurazione, cio`e coordinate su Q.
Limportanza delle coordinate canoniche `e sostanzialmente dovuta al fatto che, rispetto a
queste, le equazioni dierenziali del campo X
H
sono sempre equazioni canoniche:
(6.36)
_
_
db
i
dt
=
H
a
i
da
i
dt
=
H
b
i
Per riconoscerlo basta ripercorrere i calcoli svolti nel primo paragrafo di questo capitolo
ed osservare che le equazioni di Hamilton (6.36) si deducono dalla denizione intrinseca
(6.34) del campo X
H
utilizzando il solo fatto che la forma simplettica `e suscettibile di
una scrittura del tipo = dp
i
dq
i
, cio`e del tipo (6.35).
Dalle equazioni (6.36) si osserva che se la funzione h(b
i
, a
i
) rappresentatrice dellhamilto-
niana H nelle coordinate canoniche (b
i
, a
i
) non dipende dalle (b
i
) (col che si pu` o dire dire
che le (b
i
) sono ignorabili) allora queste equazioni si riducono a
(6.37)
db
i
dt
=
h
a
i
,
da
i
dt
= 0.
In tal caso le seconde n equazioni si integrano subito:
(6.38) a
i
= costante.
256 Capitolo 6. Meccanica hamiltoniana
Cos` le prime, perche anche le derivate parziali
(6.39) h
i
=
h
a
i
sono delle costanti, per cui
(6.40) b
i
= h
i
t +c
i
con c
i
costanti arbitrarie. Lintegrazione delle equazioni di Hamilton `e dunque riconduci-
bile alla ricerca di questi particolari sistemi di coordinate canoniche.
`
E questa lidea guida
del metodo di Jacobi.
Per costruire questo metodo si comincia con losservare che se (q
i
, p
i
) `e un sistema di
coordinate canoniche (per esempio naturali) allora (b
i
, a
i
) `e ancora un sistema di coordinate
canoniche se e solo se
(6.41) d(p
i
dq
i
+b
i
da
i
) = 0,
perche questequazione equivale alluguaglianza dp
i
dq
i
= da
i
db
i
, cio`e a = da
i
db
i
.
La (6.41) aerma che la 1-forma p
i
dq
i
+ b
i
da
i
sopra T
Q `e chiusa, quindi localmente
esatta: esistono localmente su T
Q funzioni W per cui
(6.42) p
i
dq
i
+ b
i
da
i
= dW
Si supponga ora che le 2n funzioni (q
, a
) siano indipendenti, formino cio`e un sistema di
coordinate su T
Q. Espressa la funzione W tramite queste coordinate,
W = W(q
i
, a
i
),
la (6.42) equivale alle equazioni
(6.43) p
i
=
W
q
i
, b
i
=
W
a
i
Ma le prime n equazioni devono essere risolubili rispetto alle a
i
perche le (q
i
, a
i
), dovendo
formare un sistema di coordinate, devono potersi esprimere come funzioni (invertibili)
delle coordinate (q
i
, p
i
). Le (6.43)
1
mostrano che questo accade se e solo se
(6.44) det
_
2
W
q
i
a
j
_
,= 0
La (6.44) `e detta condizione di completezza. Una funzione W(q
, a
) soddisfacente a
questa condizione prende il nome di funzione generatrice della trasformazione ca-
nonica (q
, p
) (b
, a
). Essa, tramite la (6.42) ovvero le equazioni (6.43), genera delle
coordinate canoniche (b
i
, a
i
) a partire da coordinate canoniche (q
, p
). Infatti, scritte le
(6.43), si invertono le (6.43)
1
esprimendo cos` le (a
) in funzione delle (q
, p
); la successiva
6.3. Il metodo di Jacobi 257
sostituzione di queste funzioni nelle (6.43)
2
permette di esprimere anche le (b
) in funzione
delle (q
, p
).
7
Fatta questosservazione sulla costruzione delle coordinate canoniche, ci si chiede quale sia
la condizione da imporre alla funzione generatrice W anche le corrispondenti coordinate
canoniche soddisno al requisito considerato allinizio, per cui H non viene a dipendere
dalle (b
) e quindi il sistema di Hamilton `e facilmente integrabile.
Per far questo `e suciente osservare che se H(q
i
, p
i
) `e la funzione rappresentativa di H
nelle coordinate (q
i
, p
i
) allora `e
H(q
i
, p
i
) = h(a
i
)
dove a secondo membro compare la funzione rappresentativa di H nelle coordinate (b
, a
).
Con lintervento delle (6.43)
1
questuguaglianza assume la forma
(6.45) H
_
q
i
,
W
q
i
_
= h
dove, in virt` u delle (6.38), h `e una costante. Possiamo allora enunciare il classico teorema
di Jacobi:
Teorema 6.3.1 Data la rappresentazione H(q
i
, p
i
) in coordinate canoniche (q
i
, p
i
) di
unhamiltoniana H, se si conosce una soluzione W(q
i
, a
i
) dellequazione dierenziale (6.45)
soddisfacente alla condizione di completezza (6.44) allora le curve integrali del campo
hamiltoniano X
H
sono determinabili con sole operazioni di inversione e di sostituzione.
Infatti, in base a quanto visto, la funzione W `e generatrice di un sistema di coordinate
canoniche (b
, a
) rispetto alle quali lhamiltoniana H dipende dalle sole (a
) e quindi X
H
risulta di immediata integrazione.
Il metodo di Jacobi riconduce il problema della determinazione delle curve integrali del
campo X
H
, cio`e lintegrazione delle equazioni di Hamilton (6.36), allintegrazione di una
sola equazione alle derivate parziali del primo ordine: lequazione (6.45). Questa prende
il nome di equazione di Hamilton-Jacobi (pi` u precisamente di equazione di Hamilton-
Jacobi ridotta). Una sua soluzione W(q
i
, a
i
) soddisfacente alla condizione (6.44)) prende
il nome di integrale completo.
7
La condizione (6.41) `e equivalente ad una delle seguenti
8
>
>
<
>
>
:
d(q
i
dpi b
i
dai) = 0,
d(q
i
dpi ai db
i
) = 0,
d(pi dq
i
+ai db
i
) = 0,
alle quali corrispondono altri tre tipi di funzioni generatrici:
8
>
>
<
>
>
:
q
i
dpi b
i
dai = dW
1
, W
1
= W
1
(pi, ai),
q
i
dpi ai db
i
= dW
2
, W
1
= W
1
(pi, b
i
),
pi dq
i
+ai db
i
= dW3, W
1
= W
1
(q
i
, b
i
).
La scelta qui fatta `e la pi` u conveniente per gli sviluppi successivi.
258 Capitolo 6. Meccanica hamiltoniana
Lintegrazione dellequazione di Hamilton-Jacobi pu` o talvolta rivelarsi pi` u semplice del-
lintegrazione delle equazioni di Hamilton anche se, una volta determinato un integrale
completo W, pu` o presentarsi la dicolt` a di invertire le equazioni (6.43)
1
, operazione pos-
sibile in principio (in virt` u della condizione (6.44)) ma non sempre facilmente eseguibile
in pratica.
Sovente `e possibile determinare un integrale completo, o almeno di ricondurre la sua deter-
minazione alle quadrature, vale a dire di esprimerlo mediante integrali semplici, attraverso
il metodo della separazione delle variabili. Questo metodo consiste nel ricercare del-
le coordinate (q
i
) su Q per le quali lequazione di Hamilton-Jacobi ammette un integrale
completo che `e somma di funzioni dipendenti ciascuna da una singola coordinata Numerosi
classici problemi sono stati studiati e risolti per questa via. Per esempio il problema delle
geodetiche di un ellissoide asimmetrico, che ha in eetti condotto Jacobi allinvenzione del
suo metodo.
Nota 6.3.1 Nellintegrare lequazione di Hamilton-Jacobi `e spontaneo far coincidere
una delle costanti dintegrazione (a
) con la costante h che compare a secondo membro
(la costante dellenergia). Se per esempio si pone
(6.46) a
n
= h,
dalla (6.39) si vede che
(6.47) h
i
=
in
.
Pertanto le (6.40) diventano
(6.48) b
i
=
in
t +c
i
_
_
_
b
k
= c
k
(k = 1, . . . , n 1),
b
n
= t t
0
(posto c
n
= t
0
)
Tenuto allora conto delle (6.43)
2
si conclude che, noto un integrale completo W(q
i
, a
i
) con
a
n
= h, tutti i moti del sistema sono determinati dalle n equazioni
(6.49)
W
a
k
= c
k
(k = 1, . . . , n 1)
W
h
= t t
0
dove le (c
) e t
0
sono costanti arbitrarie. Le prime n 1 equazioni (6.49) non contengono
il tempo, quindi al variare delle 2n 1 costanti (a
, c
) deniscono le orbite. Il modo con
cui queste orbite vengono percorse `e invece descritto dallultima equazione (6.49).
Mettiamo in opera il metodo di Jacobi in due semplici problemi.
Esempio 6.3.1 Si consideri la dinamica di un grave di massa m in un piano verticale.
La variet` a delle congurazioni Q `e il piano euclideo (il piano verticale). Prendiamo su
6.3. Il metodo di Jacobi 259
questo delle coordinate cartesiane ortonormali (q
1
, q
2
) = (x, z) con lasse z orientato verso
lalto. Poniamo (p
1
, p
2
) = (p
x
, p
z
). Lenergia cinetica e il potenziale sono
T =
1
2
m
_
x
2
+ z
2
_
, U = mg z.
Lhamiltoniana `e
H =
1
2m
_
p
2
x
+p
2
z
_
+ mg z.
Lequazione di Hamilton-Jacobi (6.45) diventa
(6.50)
1
2m
_
_
W
x
_
2
+
_
W
z
_
2
_
+mg z = h.
Cerchiamone una soluzione del tipo
W = ax + F(z),
con a R. Sostituendo una tale espressione nella (6.50) si trova
1
2m
_
a
2
+
_
dF
dz
_
2
_
+mgz = h.
Quindi
_
dF
dz
_
2
= 2m(h mgz) a
2
= 2m
2
g
_
h
mg
z
_
a
2
= 2m
2
g (z
0
z) ,
posto
(6.51) z
0
=
1
mg
_
h
a
2
2m
_
.
Di qui segue subito che deve essere
z z
0
.
La costante z
0
rappresenta quindi la quota massima raggiungibile dal punto (dotato di
energia h). Integrando per valori positivi della derivata di F si ha, a meno di uninessenziale
costante additiva,
F = m
_
2g
_
_
z
0
z dz =
2
3
m
_
2g
_
z
0
z
_3
2
.
Si trova in denitiva la soluzione
W = ax
2
3
m
_
2g
_
z
0
z
_3
2
.
Ponendo a
1
= a e a
2
= h si verica che questa funzione `e eettivamente un integrale
completo. Infatti, tenuto conto del legame (6.51) tra le varie costanti, si ha
z
0
a
=
a
m
2
g
,
z
0
h
=
1
mg
.
260 Capitolo 6. Meccanica hamiltoniana
Per cui:
det
_
2
W
xa
2
W
xh
2
W
za
2
W
zh
_
_
= det
_
_
1 0
2
F
za
2
F
zh
_
_ =
2
F
zh
=
h
_
m
2g
_
z
0
z
_1
2
_
=
1
2g
_
z
0
z
_
1
2
.
Pertanto W `e un integrale completo denito per z < z
0
. Mettiamo ora in opera le equazioni
(6.49). A conti fatti risulta:
_
_
x +
_
2
g
a
m
_
z
0
z
_1
2
= c,
_
2
g
_
z
0
z
_1
2
= t
0
t,
con c e t
0
costanti arbitrarie. Elevando entrambe queste equazioni al quadrato (col che si
elimina la doppia determinazione del segno della W) si trova in conclusione:
_
_
z
0
z =
gm
2
2a
2
_
x c
_
2
,
z
0
z =
g
2
_
t t
0
_
2
.
La prima equazione mostra che le orbite sono delle parabole. La seconda esprime la nota
legge di caduta del grave. Non resta che chiarire il signicato delle costanti. Dalla seconda
di queste equazioni si vede che la costante t
0
`e listante in cui la quota massima z = z
0
`e
raggiunta, dalla prima che c `e lordinata corrispondente. Per quel che riguarda inne la
costante a, dallequazione
p
x
=
W
x
= a
si vede che essa coincide con la quantit` a di moto orizzontale, a conferma del fatto che
questa `e un integrale primo.
Esempio 6.3.2 Si consideri loscillatore armonico piano: un punto mobile su di un piano
ed attratto da una forza elastica centrata in un punto sso O. Scegliendo coordinate
cartesiane ortonormali (q
1
, q
2
) = (x, y) centrate nel punto O e posto al solito (p
1
, p
2
) =
(p
x
, p
y
) lhamiltoniana `e
H =
1
2m
_
p
2
x
+ p
2
y
_
+
k
2
_
x
2
+ y
2
_
.
Moltiplicando per 2m lequazione di Hamilton-Jacobi diventa
(6.52)
_
W
x
_
2
+
_
W
y
_
2
+mk
_
x
2
+y
2
_
= 2 mh.
6.3. Il metodo di Jacobi 261
Anche in questo caso la si pu` o integrare separando le variabili. Con una soluzione del tipo
W = W
1
(x) + W
2
(y)
lequazione (6.52) si spezza nella somma di due equazioni dierenziali separate del tutto
simili:
_
dW
1
dx
_
2
+mk x
2
= mka
1
,
_
dW
2
dy
_
2
+ mk y
2
= mka
2
,
posto che si abbia
(6.53) h =
k
2
_
a
1
+ a
2
_
.
Si noti che le costanti arbitrarie (a
1
, a
2
) devono essere positive. Dalla prima equazione si
vede che
W
1
=
mk
_
_
a
1
x
2
dx.
Non `e tuttavia necessario procedere al calcolo di questintegrale, perche ci` o che in eetti
torna utile `e conoscere le derivate parziali della funzione W rispetto alle costanti (a
1
, a
2
).
Derivando sotto il segno di integrale si trova allora (prendendo per esempio il segno +)
W
a
1
=
W
1
a
1
=
mk
_
dx
2
_
a
1
x
2
=
1
2
mk arcsin
x
a
1
.
Combinando ora le equazioni (6.40) con le equazioni (6.43)
2
, tenuto conto che per la (6.53)
si ha
h
1
=
h
a
1
=
k
2
,
si trova
1
2
mk arccos
x
a
1
=
1
2
k t c
1
.
Di qui, con un riaggiustamento della costante arbitraria c
1
, segue inne
x =
a
1
cos
_
_
k
m
t c
1
_
.
Per la coordinata y sussiste unequazione analoga:
y =
a
2
cos
_
_
k
m
t c
2
_
.
Si ritrovano cos` i moti armonici componenti.
Nota 6.3.2 Salvo casi moto speciali, il metodo di Jacobi risulta applicabile solo per
separazione delle variabili. I cosiddetti sistemi separabili formano una classe importante
di sistemi integrabili.
262 Capitolo 6. Meccanica hamiltoniana
Esempio 6.3.3 Un altro classico problema che si integra per separazione delle variabili,
gi` a studiato da Euler e Lagrange, `e quello di un punto materiale soggetto al campo generato
da due centri ssi (F
1
, F
2
) newtoniani o coulombiani (attrattivi o repulsivi). Si
dimostra che, nel caso piano, denotate con (r
1
, r
2
) le distanze del punto dai due centri,
lequazione di Hamilton-Jacobi si separa rispetto alle coordinate q
1
= r
1
+r
2
e q
2
= r
1
r
2
.
Le curve coordinate sono le coniche omofocali di fuochi (F
1
, F
2
) (ellissi e iperboli). Si
dimostra anche che il pi` u generale campo di forza conservativo piano per cui lequazione
di Hamilton-Jacobi si separa rispetto a queste coordinate, dette ellittico-iperboliche,
`e proprio dato dai due centri newtoniani o coulombiani ssi a cui si pu` o aggiungere una
forza lineare rispetto alla distanza dal loro punto medio (attrattiva o repulsiva, quindi di
tipo elastico o centrifugo).
6.4 Parentesi di Poisson e integrali primi
Per un generico campo vettoriale X su T
Q di componenti (X
i
, X
i
) (si veda la (6.12)) e
per una qualunque funzione reale dierenziabile F su T
Q si ha
X, dF) = X
i
i
F + X
i
i
F.
Se in particolare il campo vettoriale `e un campo hamiltoniano X
H
, viste le (6.19), risulta
(6.54) X
H
, dF) =
i
H
i
F
i
H
i
F.
Se allora si pone, qualunque siano le funzioni H ed F sopra T
Q,
(6.55) H, F =
n
i=1
_
H
p
i
F
q
i
H
q
i
F
p
i
_
luguaglianza (6.54) diventa
(6.56) X
H
, dF) = H, F
Parallelamente, tenuto conto della denizione (6.17) di campo hamiltoniano, si ha
(X
H
, X
F
) = X
F
, dH) =
i
H
i
F
i
H
i
F,
quindi
(6.57) (X
H
, X
F
) = H, F
Da queste formule emerge limportanza delloperazione denita dalla (6.55).
Definizione 6.4.1 Loperazione binaria interna , sullinsieme delle funzioni die-
renziabili sopra T
Q denita dalla (6.55) prende il nome di parentesi di Poisson. Due
funzioni F e G si dicono in involuzione se F, G = 0.
8
8
Nei testi di Meccanica Analitica le parentesi di Poisson sono in genere denite con segno opposto a quello
qui adottato.
6.4. Parentesi di Poisson e integrali primi 263
Le parentesi di Poisson istituiscono sullinsieme delle funzioni dierenziabili sopra il -
brato cotangente T
Q una struttura di algebra di Lie, che prende il nome di algebra di
Poisson.
9
Esse infatti sono anticommutative, bilineari e soddisfano allidentit` a di Jacobi:
(6.58)
F, G = G, F,
a F +b G, H = a F, H + b G, H (a, b R),
_
F, G, H
_
+
_
G, H, F
_
+
_
H, F, G
_
= 0.
La verica delle prime due propriet` a `e immediata, ma quella dellidentit` a di Jacobi richiede
qualche calcolo. Di immediata verica sono pure le seguenti propriet` a dierenziali: la
regola di Leibniz (per entrambi i fattori)
(6.59) F, GH = F, G H + F, H G
e la regolarit` a,
(6.60) F, G = 0, G = dF = 0.
Nota 6.4.1 Il legame tra la parentesi di Poisson e le parentesi di Lie dei campi vettoriali
hamiltoniani `e dato dalla formula notevole
(6.61) [X
H
, X
F
] = X
{H,F}
Questa mostra due fatti interessanti:
(i) la parentesi di Lie di due campi hamiltoniani `e ancora un campo hamiltoniano: la sua
hamiltoniana `e proprio la parentesi di Poisson delle due hamiltoniane. Siccome valgono
anche le identit` a (di immediata verica)
(6.62) X
aH
= a X
H
(a R), X
H+F
= X
H
+X
F
,
si conclude che linsieme dei campi vettoriali hamiltoniani forma una sottoalgebra di Lie
dei campi vettoriali su T
Q.
9
Unalgebra di Lie `e unalgebra il cui prodotto `e bilineare, anticommutativo e soddisfacente alla pro-
priet`a ciclica detta identit`a di Jacobi. Oltre allalgebra di Poisson altri esempi di algebre di Lie gi`a
visti sono: (i) Lo spazio vettoriale euclideo tridimensionale dotato del prodotto vettoriale . Infatti
u v = v u e inoltre
u (v w) + v (w u) +w (u v) = 0.
(ii) Linsieme degli endomorsmi antisimmetrici sopra uno spazio vettoriale euclideo (o pesudoeuclideo),
assunto come prodotto il commutatore [A, B] = ABBA.
`
E ovviamente anticommutativo e si verica
subito che vale lidentit`a di Jacobi:
A, [B, C]
B, [C, A]
C, [A, B]
= 0.
(iii) Linsieme dei campi vettoriali sopra una variet`a dierenziabile, dove il prodotto `e la parentesi di Lie.
264 Capitolo 6. Meccanica hamiltoniana
(ii)Lapplicazione che associa ad ogni funzione dierenziabile H su T
Q il campo ha-
miltoniano X
H
su T
Q `e un omomorsmo di algebre di Lie, conserva cio`e le due
parentesi. Per dimostrare la (6.61) si usa la denizione (6.56) e lidentit` a di Jacobi (6.58)
3
:
_
X
H
, X
F
, dG) = X
H
, dX
F
, dG)) X
F
, dX
H
, dG))
= X
H
, dF, G) X
F
, dH, G)
=
_
H, F, G
_
_
F, H, G
_
=
_
H, F, G
_
+
_
F, G, H
_
=
_
G, H, F
_
= X
{H,F}
, dG).
Le parentesi di Poisson svolgono un ruolo cruciale nella trattazione degli integrali primi
di un campo hamiltoniano. Infatti, richiamata la denizione di derivata di una funzione
rispetto ad un campo vettoriale,
X
H
, dF) =
dF
dt
,
si vede dalla (6.56) che la derivata di una funzione F lungo le curve integrali del campo
hamiltoniano X
H
`e data da
(6.63)
dF
dt
= H, F.
Di qui si conclude che
Teorema 6.4.1 Una funzione F `e un integrale primo del campo hamiltoniano X
H
se
e solo se H, F = 0, cio`e se e solo se essa `e in involuzione con lhamiltoniana H del
campo.
Siccome `e ovviamente H, H = 0 si ha anche che
Teorema 6.4.2 Lhamiltoniana H `e un integrale primo del campo vettoriale X
H
.
`
E inoltre unimmediata conseguenza dellidentit` a di Jacobi il seguente classico teorema
di Poisson sugli integrali primi:
Teorema 6.4.3 Se F e G sono due integrali primi del campo X
H
, allora la loro
parentesi di Poisson F, G `e anche un integrale primo.
Dalle condizioni H, F = 0 e H, G = 0 segue infatti, per lidentit` a di Jacobi,
_
H, F, G
_
=
0. Si ha cos` un semplice metodo di costruzione di nuovi integrali primi a partire da inte-
grali primi noti, il cui utilizzo per` o `e limitato dal fatto che la parentesi di Poisson F, G
pu` o essere funzionalmente dipendente da F e G e quindi non dare luogo a nessun integrale
primo essenzialmente nuovo, o essere addirittura nulla.
Come sappiamo, la conoscenza di integrali primi facilita lanalisi e la determinazione delle
curve integrali di un campo vettoriale. Se, nel migliore dei casi, si conoscono m 1
6.4. Parentesi di Poisson e integrali primi 265
integrali primi indipendenti (dove m`e la dimensione della variet` a su cui il campo `e denito)
allora risultano determinate le orbite e le curve integrali sono almeno ricondotte alle
quadrature, cio`e al calcolo di integrali. Tuttavia `e notevole il fatto che per lintegrabilit` a
di un sistema hamiltoniano X
H
`e suciente conoscere n integrali primi indipendenti (con
n =
1
2
dim(T
Q) = dim(Q)) tra i quali possiamo sempre includere lhamiltoniana H,
purche questi siano in involuzione. Si tratta del notevole teorema di integrabilit` a di
Liouville:
Teorema 6.4.4 Se di un campo hamiltoniano X
H
su di un brato cotangente T
Q di
dimensione 2n si conoscono n integrali primi indipendenti ed in involuzione allora le sue
curve integrali sono ricondotte alle quadrature con operazioni di inversione.
Questo teorema, su cui si ritorner` a pi` u avanti, `e una conseguenza diretta del fatto che
la conoscenza di un sistema di n integrali primi in involuzione equivale alla conoscenza
di un integrale completo dellequazione di Hamilton-Jacobi, come mostrato dal teorema
seguente:
Teorema 6.4.5 (i) Se (F
i
) sono n integrali primi verticalmente indipendenti
10
ed in
involuzione di un campo hamiltoniano X
H
allora, risolte le n equazioni
(6.64) F
i
(q
, p
) = a
i
rispetto alle p
, si ottengono delle funzioni
(6.65) p
i
= W
i
(q
, a
)
tali che per ogni valore dei parametri a
la 1-forma W
i
dq
i
`e chiusa. Esiste quindi local-
mente una funzione W(q
, a
) per cui
(6.66) p
i
=
W
q
i
.
Questa funzione `e un integrale completo dellequazione di Hamilton-Jacobi. (ii) Viceversa,
se si conosce un integrale completo W(q
, a
) dellequazione di Hamilton-Jacobi allora,
risolvendo le equazioni (6.66) rispetto alle costanti (a
), si trovano delle funzioni (6.64)
che sono integrali primi in involuzione di X
H
.
Come si vede, si passa dagli integrali primi in involuzione F
i
alle funzioni W
i
con operazioni
di inversione e dalle W
i
alla funzione W con uno o pi` u integrali semplici.
11
Inne, dalla W si
ottengono le curve integrali con le operazioni viste al paragrafo precedente. Lintegrazione
10
La denizione di indipendenza verticale `e data nella Nota 6.4.2 seguente. Il suo signicato sar`a chiarito
nel prossimo paragrafo. Lipotesi di verticale indipendenza degli integrali primi pu`o essere omessa; la
dimostrazione del teorema di Liouville richiederebbe per`o ulteriori considerazioni sulle trasformazioni di
coordinate canoniche.
11
Infatti W `e ottenibile integrando la forma dierenziale Wi dq
i
sul piano coordinato (q
i
) = R
n
, o lungo una
retta uscente dallorigine, oppure lungo una spezzata di segmenti di rette parallele agli assi coordinati.
266 Capitolo 6. Meccanica hamiltoniana
delle equazioni di Hamilton `e dunque ricondotta ad operazioni di inversione e a quadrature,
per cui il teorema di Liouville `e dimostrato.
Resta dunque da dimostrare il Teorema 6.4.5 il quale peraltro, come si vedr` a nel pros-
simo paragrafo, `e unimmediata conseguenza dellinterpretazione geometrica di integrale
completo.
Nota 6.4.2 Per denizione, le n funzioni F
i
(q
, p
) sono indipendenti se i loro dieren-
ziali dF
i
sono ovunque linearmente indipendenti. Questa propriet` a `e caratterizzata dalla
massimalit` a del rango della matrice 2n n delle derivate parziali
(6.67)
_
F
i
q
j
,
F
i
p
k
_
.
Le funzioni (F
i
) si dicono in particolare verticalmente indipendenti se
(6.68) det
_
F
i
p
k
_
,= 0.
Questa `e proprio la condizione necessaria e suciente per la risolubilit` a delle (6.64) rispetto
alle p
.
Alla luce del Teorema 6.4.5, lequazione di Hamilton-Jacobi pu` o anche essere vista come
strumento per la costruzione di integrali primi in involuzione. Dalla seconda parte si pu` o
infatti estrarre lenunciato seguente:
Teorema 6.4.6 Se si determina un sistema di n funzioni p
i
= W
i
(q
j
, a
k
) dipendenti
da n parametri (a
k
) tali che
(6.69)
_
_
det
_
W
i
a
k
_
,= 0,
i
W
j
=
j
W
i
,
H(q
i
, W
j
) = h = costante,
allora le funzioni a
i
= F
i
(q
, p
) che si ottengono da questo sistema risolto rispetto alle
(a
) sono integrali primi verticalmente indipendenti ed in involuzione.
La dierenza rispetto al Teorema 6.4.5 `e che qui intervengono solo le funzioni W
i
e non
lintegrale completo W. La (6.69)
1
`e la condizione di completezza, la (6.69)
2
`e la condizione
di chiusura della 1-forma W
i
dq
i
e la (6.69)
3
`e lequazione di Hamilton-Jacobi. La (6.69)
3
sta a signicare che una volta sostituite le funzioni W
i
al posto delle p
i
nellhamiltoniana,
le q
i
scompaiono e lhamiltoniana si riduce ad una funzione h dei soli parametri (a
).
Esempio 6.4.1 Consideriamo un punto libero sul piano euclideo, con coordinate polari
(r, ) e soggetto ad un campo di dipolo di potenziale
U = k
cos
r
2
,
6.5. Sottovariet`a lagrangiane 267
con k costante positiva. La lagrangiana e lhamiltoniana sono rispettivamente (la massa `e
unitaria)
_
_
L =
1
2
_
r
2
+ r
2
2
_
+ k
cos
r
2
,
H =
1
2
_
p
2
r
+
1
r
2
p
2
_
k
cos
r
2
,
posto che
p
r
= r, p
= r
2
.
Dallesame dellhamiltoniana si osserva che lequazione (6.69)
3
`e soddisfatta con
p
2
= 2 k cos +a, p
2
r
= 2 h
a
r
2
,
per cui, oltre allintegrale dellenergia, troviamo immediatamente lintegrale primo
a = p
2
2 k cos = r
4
2
2 k cos .
La condizione di chiusura (6.69)
2
`e soddisfatta perche in questo caso ogni p
i
`e funzione
della corrispondente q
i
solamente: si tratta del gi` a citato fenomeno della separazione
delle variabili nellequazione di Hamilton-Jacobi. Anche la condizione di completezza
(6.69)
3
risulta soddisfatta, come si vede con qualche calcolo (salvo che per = 0, , ma
queste singolarit` a isolate sono irrilevanti). Da questintegrale primo e da quello dellenergia
si traggono le equazioni
(6.70)
_
2
=
a + 2 k cos
r
4
,
r
2
= 2 h
a
r
2
,
su cui si pu` o basare lo studio dei moti. Si noti che la seconda equazione `e del tipo
Weierstrass. Si pu` o per esempio dedurre che i moti per cui h = 0 e a = 0 sono semi-
circolari, analoghi a quelli di un pendolo centrato nellorigine, con oscillazioni tra
2
e
2
.
Infatti in questo caso la (6.70)
2
implica r = r
0
= costante e la (6.70)
1
diventa unequazione
di Weierstrass
2
=
2 k cos
r
4
0
,
con il secondo membro nullo per =
2
.
6.5 Sottovariet`a lagrangiane
Definizione 6.5.1 Una sottovariet` a T
Q `e detta lagrangiana se la sua dimen-
sione `e n (cio`e uguale alla dimensione di Q) e se inoltre la 2-forma simplettica = d si
annulla sui vettori tangenti a : p , u, v T
p
, (u, v) = 0.
268 Capitolo 6. Meccanica hamiltoniana
Vediamo ora la caratterizzazione delle sottovariet` a lagrangiane attraverso le loro possibili
rappresentazioni. Una sottovariet` a T
Q di dimensione n pu` o essere descritta (almeno
localmente) da un numero complementare (quindi ancora uguale a n) di equazioni
(6.71) F
i
(q
, p
) = 0,
dove le F
i
sono n funzioni indipendenti su T
Q, quindi tale che la matrice n 2n delle
derivate parziali
(6.72)
_
F
i
q
j
,
F
i
p
k
_
ha rango massimo. La stessa sottovariet` a pu` o essere anche descritta localmente da equa-
zioni parametriche in n parametri (u
h
)
(6.73)
_
q
i
= q
i
(u
),
p
i
= p
i
(u
),
con la matrice n 2n delle derivate parziali
(6.74)
_
q
i
u
h
,
p
i
u
h
_
di rango massimo. Cominciamo con lesame di questa seconda rappresentazione.
Teorema 6.5.1 La sottovariet` a rappresentata dalle equazioni parametriche (6.73) `e
lagrangiana se e solo se valgono le uguaglianze
12
(6.75)
p
i
u
h
q
i
u
k
p
i
u
k
q
i
u
h
= 0.
Dimostrazione. Sostituendo le equazioni parametriche (6.73) nellespressione = dp
i
dq
i
della forma simplettica troviamo
(6.76) dp
i
dq
i
=
p
i
u
h
q
i
u
k
du
h
du
k
.
Quindi, per lantisimmetria del prodotto esterno du
h
du
k
, lannullarsi del primo membro
equivale alle condizioni (6.75) Daltra parte va osservato che la (6.76) esprime proprio la
restrizione di ai vettori tangenti a , o come si usa dire, la restrizione di a , denotata
con [ (si veda losservazione seguente).
Nota 6.5.1 Lenunciato precedente `e una propriet` a generale delle forme dierenziali
ristrette alle sottovariet` a. Sia M una variet` a di dimensione m e sia S M una sottovariet` a
di dimensione n. Siano (x
A
) (A = 1, . . . , m) coordinate su di un dominio U di M a
intersezione non vuota con S e
x
A
= x
A
(u
i
)
12
Somma sottintesa sullindice ripetuto i. Le espressioni a primo membro delle (6.75) sono chiamate
parentesi di Lagrange.
6.5. Sottovariet`a lagrangiane 269
delle equazioni parametriche di S nei parametri (u
i
) (i = 1, . . . , n). Derivando formalmente
queste equazioni si ottengono le componenti (v
A
) dei vettori v tangenti a S,
v
A
= x
A
=
x
A
u
i
u
i
,
come funzioni di altri n parametri reali ( u
i
), che possono essere interpretati come le compo-
nenti di un vettore u R
n
. Sia allora =
A
dx
A
una 1-forma su M (questo ragionamento
si estende al caso di una qualunque p-forma). Il valore di su di un generico vettore v TS
`e dato da
v, ) =
A
v, dx
A
) =
A
v
A
=
A
x
A
u
i
u
i
.
Possiamo daltra parte interpretare le componenti u
i
come il valore dei dierenziali du
i
sul generico vettore u R
n
:
u
i
= u, du
i
).
Allora la formula precedente mostra che la restrizione di ai vettori tangenti a S, che
denotiamo semplicemente con [S (anziche, come sarebbe pi` u corretto, con [TS), si
ottiene semplicemente sostituendo nella sua espressione
A
dx
A
le equazioni parametriche
di S:
[S =
A
x
A
u
i
du
i
.
Applicando questa regola alla 2-forma simplettica [ si trova
[ = (dp
i
dq
i
)[ =
_
p
i
u
h
du
h
_
_
q
i
u
k
du
k
_
,
cio`e la (6.76).
Consideriamo ora la rappresentazione (6.71).
Teorema 6.5.2 La sottovariet` a denita dalle equazioni (6.71) `e lagrangiana se e solo
se le funzioni F
i
sono in involuzione sopra , cio`e
(6.77) F
i
, F
j
[ = 0.
Dimostrazione. Si considerino i campi vettoriali hamiltoniani X
i
generati dalle F
i
(usiamo la notazione X
i
, pi` u semplice di X
F
i
) e quindi deniti dalle equazioni
(6.78) (X
i
, ) = dF
i
.
Per le denizioni (6.56) e (6.57) del paragrafo precedente seguono le uguaglianze
(6.79)
_
X
i
, dF
j
) = F
i
, F
j
,
(X
i
, X
j
) = F
i
, F
j
.
270 Capitolo 6. Meccanica hamiltoniana
Se valgono le (6.77) allora segue dalle (6.79) che sui punti di valgono le uguaglianze
(6.80)
_
X
i
, dF
j
) = 0,
(X
i
, X
j
) = 0.
La prima aerma che ogni campo X
i
`e tangente a . Siccome questi campi sono punto
per punto indipendenti, la seconda mostra che ristretta a tutte le coppie di vettori
tangenti a `e nulla.
13
Dunque `e lagrangiana. Viceversa, dimostriamo che le (6.77)
sono necessarie per la lagrangianit` a cominciando con losservare che, valendo le (6.71), un
generico vettore tangente v a `e caratterizzato dalle equazioni v, dF
i
) = 0, quindi dalle
equazioni
(X
i
, v) = 0.
Questequazione, valida per ogni v T, mostra che anche ogni campo vettoriale X
i
`e
a sua volta tangente a . Pertanto, per la lagrangianit` a di , su `e (X
i
, X
j
) = 0 e
quindi F
i
, F
j
= 0 per la (6.57). 2
Nellultima parte di questa dimostrazione si `e utilizzata una propriet` a di algebra lineare
simplettica, oggetto della nota seguente.
Nota 6.5.2 Chiamiamo spazio vettoriale simplettico una coppia (E, ) costituita
da uno spazio vettoriale E (reale e a dimensione nita) e da una forma bilineare antisim-
metrica su E a valori in R e regolare, cio`e tale che (u, v) = 0, v E = u = 0. Se
si considera una base qualsiasi (e
A
) di E, le componenti
AB
= (e
A
, e
B
) di soddisfano
alle condizioni di antisimmetria
AB
=
BA
e di regolarit` a det[
AB
] ,= 0. Siccome una
matrice antisimmetrica ha determinante nullo se `e di ordine dispari, lo spazio vettoriale
E ha necessariamente dimensione pari m = 2n. In analogia con quanto si fa per gli spazi
euclidei, si denisce lortogonale (simplettico) di un sottospazio K E ponendo
K
= v E [ (u, v) = 0, u K.
La dimensione di K
`e complementare a quella di K. Si osservi che ogni vettore `e
ortogonale a se stesso. Un sottospazio L E `e detto lagrangiano se ha dimensione
n (la met` a di E) e se su di esso si annulla : (u, v) = 0 per ogni u, v L (si pu` o
dimostrare che in eetti n `e la dimensione massima dei sottospazi su cui si annulla ).
`e allora interessante osservare che L
= L. Infatti da u L segue u L
(perche per
la lagrangianit` a `e (u, v) = 0 per ogni v ), dunque L L
. Ma poiche L ha la
stessa dimensione di L
, segue luguaglianza dei due sottospazi. Si pu` o allora aermare
che un vettore ortogonale a L sta in L. Questa `e appunto la propriet` a usata alla ne della
dimostrazione precedente. Occorre a questo proposito ancora osservare che in ogni punto
p T
Q la forma simplettica si riduce ad una forma bilineare antisimmetrica regolare,
per cui T
p
(T
Q) `e uno spazio vettoriale simplettico. Inoltre se T
Q `e una sottovariet` a
lagrangiana, allora per ogni p lo spazio tangente T
p
`e un sottospazio lagrangiano di
T
p
(T
Q).
13
I vettori Xi sono indipendenti perche dalla (6.78) segue (a
i
Xi, ) = a
i
dFi e quindi da a
i
Xi = 0 segue
a
i
dFi = 0. Ma i dierenziali dFi sono indipendenti, dunque a
i
= 0.
6.5. Sottovariet`a lagrangiane 271
Consideriamo ora una classe particolare di sottovariet` a lagrangiane.
Definizione 6.5.2 Una sottovariet` a lagrangiana T
Q si dice trasversa alle bre
se in ogni suo punto p lo spazio tangente T
p
`e complementare allo spazio V
p
(T
Q) dei
vettori verticali in p. Un vettore di T(T
Q), cio`e un vettore tangente a T
Q, si dice
verticale se le sue componenti ( q
i
) sono nulle.
14
Teorema 6.5.3 Una sottovariet` a T
Q rappresentata da n equazioni (6.71) `e
trasversa alle bre se e solo se le funzioni F
i
sono verticalmente indipendenti.
Dimostrazione. I vettori tangenti a hanno componenti ( q
i
, p
i
) soddisfacenti alle
equazioni lineari
(6.81)
k
F
i
q
k
+
k
F
i
p
k
= 0,
ottenute derivando formalmente le (6.71). I vettori verticali di T soddisfano quindi alle
equazioni
(6.82)
k
F
i
p
k
= 0.
La sottovariet` a `e trasversa alle bre se e solo se in ogni suo punto i vettori tangenti
e verticali si riducono al vettore nullo, quindi se e solo se il sistema lineare omogeneo
(6.82) ammette come unica soluzione quella nulla: p
k
= 0. Ci` o equivale alla condizione
det[
k
F
i
] ,= 0. 2
Teorema 6.5.4 Una sottovariet` a T
Q di dimensione n `e trasversa alle bre se e
solo se ammette (localmente) una rappresentazione parametrica del tipo
(6.83) p
i
= W
i
(q
j
),
cio`e tale che i momenti (p
i
) sono funzioni delle coordinate (q
j
) di Q.
15
Dimostrazione. Ritornando al teorema precedente, si osserva che la verticale indipen-
denza delle funzioni F
i
, equivalente alla trasversalit` a, equivale a sua volta alla risolubilit` a
delle equazioni (6.71) rispetto alle p
i
, quindi alla possibilit` a di scrivere delle equazioni del
tipo (6.83). 2
`
E essenziale per i ni che ci siamo proposti il fatto che:
Teorema 6.5.5 Le equazioni (6.83) deniscono una sottovariet` a lagrangiana se e solo
se la 1-forma su Q
(6.84) W = W
i
dq
i
`e chiusa: dW = 0.
14
Una denizione equivalente `e la seguente: un vettore v Tp(T
Q) `e verticale se `e una classe di equivalenza
di curve su T
Q la cui immagine sta tutta nello spazio T
q
Q (cio`e nella bra) contenente p.
15
Le (q
j
) hanno dunque il ruolo di parametri.
272 Capitolo 6. Meccanica hamiltoniana
Dimostrazione. Si pu` o utilizzare il Teorema 6.5.1. In questo caso `e u
h
= q
h
quindi la
condizione di lagrangianit` a (6.75) diventa semplicemente
h
p
k
k
p
h
= 0,
ovvero
h
W
k
k
W
h
= 0,
cio`e dW = 0. 2
Nota 6.5.3 La chiusura della forma W equivale alla sua locale esattezza: per ogni
punto di Q su cui W `e denita esiste un intorno U Q ed una funzione W : U R tale
che dW = W[U. Ci` o signica che W
i
=
i
W quindi che le (6.83) assumono la forma
(6.85) p
i
=
W
q
i
.
Queste funzioni, che sulle intersezioni dei loro domini di denizione dieriscono per delle
costanti, si chiamano funzioni generatrici della sottovariet` a lagrangiana . Conclu-
diamo pertanto che ogni sottovariet` a lagrangiana trasversa alle bre di T
Q `e generata
(almeno localmente) da funzioni generatrici, le quali sono funzioni sopra la variet` a delle
congurazioni Q, cio`e funzioni delle coordinate lagrangiane.
Nota 6.5.4 Siamo ora in grado di dare una notevole interpretazione geometrica di
integrale completo. Unintegrale completo, in senso geometrico, di unhamiltoniana H
`e un _
_
(i) fogliettamento lagrangiano di T
Q,
(ii) trasverso alle bre,
(iii) compatibile con H (H `e costante su ogni foglio).
Per fogliettamento intendiamo una partizione di un aperto V di T
Q in sottovariet` a
connesse e massimali, tutte della stessa dimensione (dette fogli). Per la condizione (i)
queste sottovariet` a sono lagrangiane, quindi di dimensione n; per la (ii) sono trasverse alle
bre. Con la (iii) sintende che su ognuna di esse H `e costante. Un integrale completo
pu` o allora essere rappresentato in due modi: (a) con equazioni del tipo (6.43)
1
dove la
funzione W(q
i
, a
j
) `e un integrale completo dellequazione di Hamilton-Jacobi, (b) con un
sistema di equazioni indipendenti
(6.86) F
i
(q
j
, p
h
) = a
i
dove le funzioni F
i
sono integrali primi in involuzione. Infatti, per ogni pressato valore dei
parametri a = (a
j
), la funzione W(q
i
, a
j
) `e generatrice di una sottovariet` a lagrangiana
a
trasversa alle bre. La condizione di completezza (6.44), assicurando la risolubilit` a delle
suddette equazioni rispetto alle a, consente di aermare che per ogni punto di V passa
una ed una sola di tali sottovariet` a, perche le a vengono ad essere funzioni delle (q
i
, p
j
),
come nelle (6.49). Le sottovariet` a lagrangiane costituiscono pertanto un fogliettamento.
6.6. Variet`a simplettiche 273
Lequazione di Hamilton-Jacobi (6.46) aerma inne che lhamiltoniana H calcolata attra-
verso le suddette equazioni, per ogni pressato valore delle a `e costante ( = h), vale a dire
che H[
a
= costante per ogni
a
. Daltra parte, osservato che le equazioni (6.86), essendo
del tutto equivalenti alle (6.43)
1
, rappresentano ancora il fogliettamento lagrangiano, le
funzioni F
i
sono in involuzione per il Teorema 6.5.2, nonche verticalmente indipendenti
per il Teorema 6.5.3. Inoltre, per quanto visto nella dimostrazione del Teorema 6.5.2, i
campi vettoriali X
i
generati dalle funzioni F
i
sono tangenti a ciascuna delle
a
e siccome
su queste H `e costante segue
0 = X
i
, dH) = F
i
, H.
Dunque le F
i
sono integrali primi di X
H
. Il legame tra i due tipi di rappresentazione
ora descritto `e proprio il contenuto del Teorema 6.4.5, che risulta pertanto dimostrato.
Osserviamo ancora, per completare il quadro geometrico, che la condizione che H sia
costante sulle sottovariet` a lagrangiane equivale alla tangenza del campo hamiltoniano X
H
a queste. Per riconoscerlo basta osservare che
X
H
, dF
i
) = H, F
i
= 0.
Possiamo allora anche aermare che la compatibilit` a del fogliettamento con H coincide
con linvarianza di ogni sottovariet` a lagrangiana rispetto al usso generato da X
H
.
6.6 Variet`a simplettiche
Linterpretazione geometrica di integrale completo dellequazione di Hamilton-Jacobi sug-
gerisce di collocare tutta la materia riguardante le equazioni di Hamilton in un contesto
pi` u ampio, che vede sostituita la struttura di brato cotangente da una struttura pi` u
generale: quella di variet` a simplettica.
Definizione 6.6.1 Dicesi variet` a simplettica una coppia (M, ) costituita da una
variet` a dierenziabile M e da una 2-forma su M, chiusa (d = 0) e regolare, cio`e tale
che in ogni punto p M vale limplicazione (u, v) = 0, u T
p
M = v = 0. Una
2-forma soddisfacente a queste condizioni prende il nome di forma simplettica.
Rappresentata in un qualunque sistema di coordinate (x
A
) di M, =
1
2
AB
dx
A
dx
B
,
la condizione di regolarit` a equivale a det[
AB
] ,= 0. Pertanto, per lantisimmetria della
matrice delle componenti [
AB
], la dimensione di M `e necessariamente pari (si veda la
Nota 6.5.2.
Nota 6.6.1 Un brato cotangente `e una variet` a simplettica. Infatti la forma simplettica
canonica , essendo esatta perche denita come il dierenziale della 1-forma fondamentale
di Liouville, `e chiusa. Inoltre essa `e regolare per quanto visto nella Nota 6.1.1. Esistono
per` o variet` a simplettiche che non sono brati cotangenti. Si consideri per esempio una
qualunque supercie bidimensionale immersa nello spazio ane euclideo ed orientabile.
274 Capitolo 6. Meccanica hamiltoniana
La forma = N aggiunta di uno dei due versori ortogonali alla supercie, `e una 2-
forma regolare. Siccome d `e una 3-forma, essa `e identicamente nulla (perche la variet` a
ha dimensione 2). Pertanto `e una forma simplettica. Certamente, se la supercie `e
compatta (una sfera, per esempio) come variet` a simplettica non pu` o identicarsi con un
brato cotangente tramite un dieomorsmo (che per giunta trasformi la forma volume
nella forma simplettica canonica) per la semplice ragione che i brati cotangenti non sono
compatti.
Le denizioni di campo vettoriale hamiltoniano (quindi di sistema dinamico hamiltonia-
no), di parentesi di Poisson e di sottovariet` a lagrangiana, viste per i brati cotangenti, si
estendono immediatamente alle variet` a simplettiche perche richiedono lintervento della
sola forma simplettica (si vedano, rispettivamente, lequazione (6.34) per i campi ha-
miltoniani, la formula (6.56) o la (6.57) per le parentesi di Poisson e inne la Denizione
6.5.1 per le sottovariet` a lagrangiane). Le condizioni di regolarit` a e di chiusura imposte ad
sono poi indispensabili per estendere alle variet` a simplettiche le propriet` a fondamentali
di questi oggetti. Si pu` o infatti dimostrare che la regolarit` a di equivale alla regolarit` a
delle parentesi di Poisson e che la chiusura di equivale allidentit` a di Jacobi. Inoltre
resta valida la propriet` a che una sottovariet` a rappresentata da n equazioni indipendenti
F
i
= 0 `e lagrangiana se e solo se le funzioni F
i
sono in involuzione (Teorema 6.5.2).
In questo contesto si colloca il teorema di Darboux
16
il quale aerma che, assegnata una
forma simplettica su M, allora nellintorno di ogni punto di M esistono delle coordinate
canoniche (q
i
, p
j
) per cui si ha
(6.87) = dp
i
dq
i
.
Pertanto in queste coordinate le equazioni dierenziali del primo ordine di un campo
hamiltoniano X
H
sono ancora le equazioni di Hamilton (6.8) e le parentesi di Poisson
sono ancora esprimibili con la formula (6.55).
6.7 Sistemi hamiltoniani integrabili
Nel contesto pi` u generale delle variet` a simplettiche il teorema di Jacobi e il parallelo teo-
rema di Liouville, formulati e dimostrati per i brati cotangenti, perdono in tutto o in
parte il loro signicato. Infatti, sebbene la Denizione 6.5.1 di sottovariet` a lagrangiana
richieda solo luso della forma simplettica e sia quindi senzaltro estendibile alle variet` a
simplettiche, viene per` o a decadere il concetto di trasversalit` a, proprio dei brati cotan-
genti, concetto usato sistematicamente (insieme a quello di verticale indipendenza) sia per
la formulazione del teorema di Jacobi sia per la dimostrazione del teorema di Liouville.
Tuttavia, per i sistemi hamiltoniani sulle variet` a simplettiche il teorema di integrabilit` a
di Liouville, opportunamente riformulato, assume un notevole signicato geometrico glo-
bale. Si tratta del fondamentale teorema di Arnold-Liouville
17
relativo ai sistemi
hamiltoniani integrabili.
16
Gaston Darboux, 1842-1917.
17
Vladimir Iliic Arnold, Mosca.
6.7. Sistemi hamiltoniani integrabili 275
Definizione 6.7.1 Un sistema hamiltoniano (M, , H), generato da una funzione H
sopra una variet` a simplettica (M, ) di dimensione 2n, si dice integrabile se ammette
un sistema di n integrali primi (F
i
) indipendenti ed in involuzione.
18
Teorema 6.7.1 Se un sistema hamiltoniano `e integrabile allora le equazioni F
i
= a
i
(=
costante) deniscono un fogliettamento lagrangiano (
a
) a cui X
H
`e tangente. Se i campi
hamiltoniani generati dalle F
i
sono completi,
19
allora ogni
a
`e dieomorfa a R
nk
T
k
con 0 k n.
20
Secondo tale dieomorsmo su ogni
a
la restrizione del campo X
H
`e
un campo quasi-periodico.
La prima parte dellenunciato `e unimmediata estensione alle variet` a simplettiche di quanto
visto alla Nota 6.5.4 del paragrafo precedente.
La seconda parte, la cui dimostrazione `e materia di corsi superiori, fonda la sua importanza
sul signicato di campo quasi periodico. Si ricordi che il toro T
k
`e il quoziente di R
k
rispetto
a Z
k
. Si consideri ora su R
n
un campo vettoriale costante
X di componenti (
i
) R
n
. Per
eetto del quozientamento rispetto a Z
k
che riduce R
n
alla variet` a R
nk
T
k
, questo campo
si riduce ad un campo X. Un campo siatto si dice quasi-periodico. `e particolarmente
interessante il caso k = n, cio`e il caso in cui le variet` a lagrangiane
a
sono dei tori. In
questo caso le componenti (
i
), che sono costanti su ogni toro ma che variano da toro a
toro (sono funzioni delle a
), prendono il nome di frequenze.
Per comprendere la ragione di questi termini conviene porsi nel caso di n = 2 (toro
bidimensionale). Si vede facilmente che se le frequenze (
1
,
2
) sono commensurabili, cio`e
soddisfano ad unuguaglianza del tipo z
1
1
+z
2
2
= 0 con (z
1
, z
2
) interi, allora le curve
integrali di X sono periodiche. Si pu` o invece dimostrare che in caso contrario le curve
integrali sono dense sul toro: ci` o signica che, considerata una qualunque curva integrale
massimale : R T
2
,
21
per ogni pressato punto p T
2
e per ogni suo intorno U esiste
almeno un t
R tale che (t
) U. In altri termini, una curva integrale passa vicino
quanto si vuole ad un qualunque punto pressato. Il teorema di Arnold-Liouville fornisce
pertanto una notevole descrizione qualitativa del comportamento delle curve integrali dei
sistemi hamiltoniani integrabili.
Esempio 6.7.1 Un semplice esempio di applicazione di questo teorema `e il seguente. Si
consideri un punto materiale soggetto ad una forza centrale newtoniana. Questo sistema
ammette due integrali primi: quello dellenergia e quello delle aree; `e dunque un sistema
integrabile nel senso di Arnold-Liouville. Riducendoci al caso piano (la variet` a Q `e il
piano euclideo) il brato cotangente `e allora fogliettato in cilindri e tori di dimensione 2.
Si verica che i tori sono il supporto dei moti al nito. Daltra parte sappiamo che esiste
un terzo integrale primo, lintegrale di Laplace, indipendente e non in involuzione con
18
Uno di questi pu`o essere la stessa hamiltoniana H. Questa denizione si estende anche al caso in cui i
punti in cui gli integrali primi non sono indipendenti formano un insieme chiuso (eventualmente di misura
nulla) detto insieme critico.
19
Ipotesi senzaltro soddisfatta se le a sono compatte.
20
Si ha necessariamente Tn se la sottovariet`a lagrangiana `e compatta.
21
Essendo il toro una variet`a compatta ogni suo campo vettoriale `e completo.
276 Capitolo 6. Meccanica hamiltoniana
quello delle aree. La coppia di integrali primi (energia,Laplace) produce allora un secondo
fogliettamento di tori e cilindri diverso dal precedente. Limitandoci a considerare i moti
al nito, concludiamo che le loro orbite nello spazio delle fasi T
Q sono le intersezioni dei
tori dei due fogliettamenti. Ma lintersezione di due tori `e una curva chiusa (accettiamo
questaermazione come intuitiva). Quindi le orbite dei moti al nito sono chiuse ed
i moti sono periodici. Questo mostra che la periodicit` a dei moti di un sistema sistema
Hamiltoniano di dimensione 4 pu` o riconoscersi direttamente dallesistenza di due integrali
primi (non in involuzione) distinti dallhamiltoniana.
Capitolo 7
Meccanica relativistica
_
`
Le equazioni del campo elettromagnetico di Maxwell prescrivono per le onde elet-
tromagnetiche nel vuoto una velocit` a di propagazione costante. Questa velocit` a
risulta essere indipendente dalla scelta del riferimento, in evidente contrasto con
la meccanica classica e la legge di composizione delle velocit` a.
Le soluzioni proposte nel 1904 dal sico Hendrik Antoon Lorentz (Arnhem 1853
- Haarlem 1928) e dal matematico Jules Henri Poincare (Nancy 1854 - Parigi
1912) per superare questo contrasto, soluzioni basate su di una radicale modica
dei concetti primitivi di tempo e di spazio, vengono nel 1905 raccolte, rielaborate
e sintetizzate da Albert Einstein (Ulm 1879 - Princeton 1955) in elementari ma,
per quel tempo, rivoluzionari princ`pi per una nuova meccanica.
Tre anni dopo, Hermann Minkowski (Alexotas, Lituania 1864 - Gottinga 1909)
mostra che questi princ`pi trovano una chiara e sintetica formulazione in uno spa-
zio ane a quattro dimensioni dotato di un tensore metrico di segnatura iperbolica:
lo spazio-tempo di Minkowski. Per descrivere la meccanica di Einstein occorrer` a
quindi premettere alcune elementari considerazioni sugli spazi vettoriali iperbolici.
7.1 Spazi vettoriali iperbolici
Richiamiamo le denizioni fondamentali concernenti i tensori metrici. Un tensore metrico
g su di uno spazio vettoriale E `e una forma bilineare simmetrica regolare sopra i vettori di
E. Il numero g(u, v) `e anche denotato con u v ed `e detto prodotto scalare dei vettori
u e v. La regolarit` a del tensore metrico si esprime nellimplicazione u v = 0, v =
0 = u = 0. Due vettori si dicono ortogonali se u v = 0. Chiamiamo (anche
se impropriamente, rispetto allo stesso termine usato in Analisi) norma del vettore u il
numero
|u| = u u.
277
278 Capitolo 7. Meccanica relativistica
Diciamo che il vettore u `e del genere spazio, del genere tempo o del genere luce se
la sua norma `e rispettivamente positiva, negativa o nulla (in questultimo caso il vettore
si dice anche isotropo: un vettore isotropo `e ortogonale a se stesso). Si noti che la norma
| | `e la forma quadratica associata alla forma bilineare simmetrica g. Una base di E si
dice canonica (o ortonormale) se costituita da vettori mutuamente ortogonali e unitari,
cio`e di norma 1. Si dimostra che esistono basi canoniche e che la coppia (p, q) costituita
dal numero p dei vettori a norma positiva e dal numero q di quelli a norma negativa
`e invariante rispetto alla scelta della base canonica. Questa coppia prende il nome di
segnatura del tensore metrico (o, con abuso di linguaggio, di segnatura dello spazio).
Per la regolarit` a del tensore metrico si ha p + q = n. Se la segnatura `e (n, 0) (cio`e se la
norma `e denita positiva) lo spazio si dice euclideo (o strettamente euclideo). Se la
segnatura `e (n 1, 1) lo spazio si dice iperbolico.
Nota 7.1.1 `e un utile esercizio sul concetto di prodotto scalare dimostrare quanto
segue. Sia V uno spazio vettoriale reale di dimensione nita n e sia E = End(V ) lo spazio
vettoriale degli endomorsmi lineari di V (quindi di dimensione n
2
). Su di E risulta
denito un prodotto scalare ponendo
A B = tr(AB).
La sua segnatura (p, q) `e
p =
1
2
n(n + 1), q =
1
2
n(n 1).
Quindi se n = 2, E diventa uno spazio iperbolico a quattro dimensioni. Se si considera su V
un tensore metrico positivo, allora gli endomorsmi simmetrici rispetto a questo tensore
sono del genere spazio, mentre quelli antisimmetrici sono del genere tempo. Inoltre gli
endomorsmi simmetrici sono ortogonali a quelli antisimmetrici. Ad ogni tensore metrico
denito positivo su V corrisponde quindi una decomposizione di E nella somma diretta
di un sottospazio del genere spazio ed in un sottospazio del genere tempo. Inne, se si
assegna su V un tensore metrico positivo si pu` o denire su E il prodotto scalare
A B = tr(AB
T
)
che, a dierenza del precedente, risulta denito positivo.
Si consideri ora uno spazio vettoriale iperbolico (E, g) di dimensione n+1. Denotiamo una
base ortonormale generica di E con (e
A
), intendendo gli indici latini maiuscoli variabili in
(0, 1, . . . , n), assumendo e
0
del genere tempo e gli altri vettori (e
i
) del genere spazio, per
cui gli indici latini minuscoli sintendono variabili in (1, . . . , n). Posto g
AB
= e
A
e
B
, la
matrice metrica ha la forma
(7.1) [g
AB
] =
_
_
1 0 . . . 0
0 1 . . . 0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 . . . 1
_
_
.
Consideriamo alcune propriet` a fondamentali degli spazi iperbolici.
7.1. Spazi vettoriali iperbolici 279
Teorema 7.1.1 Un vettore (diverso dal vettore nullo) ortogonale ad un vettore del
genere tempo `e del genere spazio. Il sottospazio ortogonale ad un vettore del genere tempo
`e uno spazio strettamente euclideo.
Dimostrazione. Sia u E un vettore del genere tempo. Si pu` o costruire una base ca-
nonica tale che e
0
= u. I restanti vettori (e
i
) formano allora una base del sottospazio dei
vettori ortogonali a u. Siccome questi vettori sono tutti del genere spazio, tale sottospazio
`e strettamente euclideo ed i suoi vettori (non nulli) hanno tutti norma positiva. 2
Sempre utilizzando una base canonica si dimostra in maniera analoga che:
Teorema 7.1.2 Il sottospazio ortogonale ad un vettore del genere spazio `e uno spazio
iperbolico se n > 1 o del genere tempo se n = 1.
Nota 7.1.2 Dal Teorema 7.1.1 segue che i sottospazi del genere tempo hanno dimen-
sione 1.
Teorema 7.1.3 Due vettori del genere luce fra loro ortogonali sono necessariamente
paralleli (cio`e linearmente dipendenti).
Dimostrazione. Un generico vettore isotropo v ,= 0 pu` o sempre mettersi nella forma
v = a(u+e
0
), dove u `e un vettore unitario, del genere spazio, ortogonale a e
0
; basta infatti
porre u =
1
a
v e
0
con a = v e
0
(si osservi che la condizione v e
0
= 0 violerebbe il
Teorema 7.1.1). Se v
= a
(u
+ e
0
) `e un altro vettore isotropo decomposto allo stesso
modo, dalla condizione v v
= 0 segue u u
1 = 0. Ma due vettori unitari del genere
spazio hanno prodotto scalare uguale a 1 se e solo se sono uguali. Da u = u
segue che v
e v
sono dipendenti. 2
Nota 7.1.3 Dal teorema precedente segue che i sottospazi isotropi hanno dimensione 1.
Inoltre, ssato un vettore c ,= 0 del genere luce, un qualunque vettore u ad esso ortogonale
e non parallelo `e del genere spazio (altrimenti si violerebbe Il Teorema 7.1.1 e il Teorema
7.1.3. Pertanto il sottospazio dei vettori ortogonali a c `e a metrica singolare (la restrizione
del tensore metrico a questo spazio non `e pi` u una forma bilineare regolare).
Denotiamo con T il sottoinsieme dei vettori del genere tempo. Diciamo che due vettori
u, v T sono ortocroni se u v < 0.
Teorema 7.1.4 La relazione di ortocronismo `e una relazione di equivalenza che divide
T in due classi, T
+
e T
.
Dimostrazione. La relazione di ortocronismo `e riessiva perche si ha v v = |v| < 0
per ogni vettore del genere tempo (per denizione). `e ovviamente simmetrica, perche `e
simmetrico il prodotto scalare. Per dimostrare la propriet` a transitiva dobbiamo dimostrare
limplicazione
(7.2) u v < 0, v w < 0 = u w < 0.
280 Capitolo 7. Meccanica relativistica
Per dimostrare che le classi di equivalenza sono due dobbiamo dimostrare limplicazione
(7.3) u v > 0, v w > 0 = u w < 0.
Per questo scopo, supposto senza ledere la generalit` a che il vettore v sia unitario, si scelga
una base canonica tale da aversi e
0
= v. Si ha allora:
u w =
n
i=1
u
i
w
i
u
0
w
0
, u v = g
00
u
0
= u
0
, w v = w
0
.
Le condizioni u T e w T sono equivalenti alle disuguaglianze
n
i=1
(u
i
)
2
(u
0
)
2
< 0,
n
i=1
(w
i
)
2
(w
0
)
2
< 0.
Per la disuguaglianza di Schwarz, valida nello spazio strettamente euclideo ortogonale a
e
0
e generato dai vettori (e
i
), si ha anche
_
n
i=1
u
i
w
i
_
2
i=1
(u
i
)
2
n
i=1
(w
i
)
2
< (u
0
w
0
)
2
.
Abbiamo allora le seguenti implicazioni: (u v < 0, v w < 0) (u
0
> 0, w
0
> 0) =
u
0
w
0
> 0 = u w < 0. Quindi limplicazione (7.2) `e dimostrata. Analogamente si ha:
(u v > 0, v w > 0) (u
0
< 0, w
0
< 0) = u
0
w
0
> 0 = u w < 0. Quindi anche
limplicazione (7.3) `e dimostrata. 2
Nota 7.1.4 Se v T
+
allora v T
, cio`e T
= T
+
. Inoltre la somma (non la
dierenza) di due o pi` u vettori di T
+
(risp. di T
) `e ancora un vettore di T
+
(risp. di
T
).
Nota 7.1.5 Sia L linsieme dei vettori del genere luce. Essi formano il cosiddetto
cono di luce. Se infatti denotiamo con x = x
A
e
A
il generico vettore dello spazio e se
imponiamo che esso sia isotropo, cio`e che x x = 0, troviamo la condizione
(7.4)
n
i=1
(x
i
)
2
(x
0
)
2
= 0.
Questa `e lequazione di un cono di centro lorigine (vettore nullo). Il cono di luce `e diviso in
due falde, L
+
e L
, denite dalle condizioni T
+
L
+
< 0 e T
< 0, ciascuna delle
quali separa dai vettori del genere spazio i vettori delle classi T
+
e T
rispettivamente, i
quali stanno allinterno di ciascuna falda del cono di luce Figura 7.1.
Nota 7.1.6 I vettori unitari del genere spazio sono caratterizzati dallequazione
(7.5)
n
i=1
(x
i
)
2
(x
0
)
2
= 1.
7.1. Spazi vettoriali iperbolici 281
_
`
Figura 7.1: Suddivisione dei vettori in uno spazio iperbolico.
Si tratta di un iperboloide a una falda. I vettori unitari del genere tempo sono invece
caratterizzati dallequazione
(7.6)
n
i=1
(x
i
)
2
(x
0
)
2
= 1.
Si tratta di un iperboloide a due falde.
Esaminiamo ora, per meglio comprendere la struttura di uno spazio iperbolico, il caso pi` u
semplice dello spazio iperbolico bidimensionale (n = 1 nelle formule precedenti). Fissata
una base canonica (e
0
, e
1
), con e
0
del genere tempo, osserviamo innanzitutto che il cono
di luce, insieme dei vettori isotropi, ha ora equazione
(x
1
)
2
(x
0
)
2
= 0
e si riduce pertanto alle rette isotrope di equazione x
1
x
0
= 0 e x
1
+x
0
= 0, bisettrici
dei quadranti individuati dai vettori della base. Volendo ragurare su di un piano coor-
dinato i vettori (e
0
, e
1
), unitari e ortogonali fra loro, occorre tener presente che il foglio
su cui riportiamo la Figura 7.2 `e la rappresentazione intuitiva dello spazio bidimensionale
strettamente euclideo, non di quello iperbolico. Per esempio, contrariamente al nostro
senso euclideo, i vettori che si trovano sulle bisettrici hanno lunghezza nulla. Inoltre i
vettori unitari del genere tempo sono caratterizzati dallequazione
(x
0
)
2
(x
1
)
2
= 1
e descrivono quindi uniperbole di vertici i punti (1, 0) e asintoti le rette isotrope, mentre
i vettori unitari del genere spazio sono caratterizzati dallequazione
(x
1
)
2
(x
0
)
2
= 1
282 Capitolo 7. Meccanica relativistica
_
`
..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . .
. . . . . . . . . . . .
................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
... .. . . . . . . .
x
0
x
1
............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................. .............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................................................................................................................................................................................................
............................................................................................................................................................................................................................... ..... .... .... ... ... .. .. ... .. .. .. . .. .. . .. .. . .. . . .. . . .. . . .. . . .. . . . .. . . . .. . . . .. . . . . .. . . . . .. . . . . . . .. . . . . . . . .. . . . . . . . . . .. . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . .. . . . . . . . . .. . . . . . . .. . . . . . .. . . . . . .. . . . .. . . . .. . . . .. . . . .. . . .. . . .. . . .. . .. . .. . .. .. .. .. . .. ... .. .. ... ... ... .... ..... ...... ...........................................................................................................................................................................................................................
...................................................
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
u
v
e
0
e
1
Figura 7.2: Ortogonalit` a nel piano iperbolico.
e descrivono pertanto liperbole di vertici i punti (0, 1) con gli stessi asintoti. Dato un
vettore u = (u
0
, u
1
) unitario del genere tempo, la retta descritta dai vettori x ortogonali
a u ha equazione
u
1
x
1
u
0
x
0
= 0.
Si consideri fra questi uno dei due vettori v unitari. Sappiamo che questi sono del genere
spazio. Allora
|u v| = |u| +|v| 2 u v = 1 + 1 0 = 0.
Ci` o signica che il vettore dierenza u v `e isotropo, quindi giacente su una delle due
bisettrici. Concludiamo che, nella rappresentazione euclidea, due vettori del piano iper-
bolico unitari e ortogonali sono simmetrici rispetto ad una delle due bisettrici Figura
7.2.
Si osservi ancora, guardando la gura, che per un osservatore iperbolico la coppia (u, v)
`e ancora una base canonica quindi del tutto equivalente alla coppia (e
0
, e
1
) e ottenibile
da questa mediante una rotazione. Siamo allora condotti ad esaminare il gruppo delle
isometrie sullo spazio iperbolico bidimensionale. Ci limitiamo a quelle di determinante
+1, cio`e alle rotazioni proprie. Data una rotazione R, si ponga
R(e
0
) = a e
0
+ b e
1
, R(e
1
) = c e
0
+d e
1
.
Ci` o equivale a considerare la matrice delle componenti di R:
[R
B
A
] =
_
_
a b
c d
_
_
7.2. Lo spazio-tempo di Minkowski 283
Dalle condizioni R(e
A
) R(e
B
) = e
A
e
B
, det R = 1, caratteristiche di una rotazione,
seguono le uguaglianze:
a
2
b
2
= 1, d
2
c
2
= 1, bd ac = 0, ad bc = 1.
Dalle ultime due si trae a = d e b = c. Dalla prima segue a
2
1. Possiamo allora porre
(7.7) a = cosh , b = sinh ,
oppure
(7.8) a = cosh , b = sinh .
Nel primo caso `e a > 0 e siccome a = R(e
0
) e
0
segue R(e
0
) e
0
< 0. Dunque R `e una
rotazione ortocrona, conserva cio`e le classi dei vettori del genere tempo. La matrice
delle componenti di una rotazione ortocrona ha quindi la forma:
(7.9) [Q
B
A
] =
_
_
cosh sinh
sinh cosh
_
_
.
Nel secondo caso si ha una rotazione non ortocrona e la matrice corrispondente `e:
(7.10) [Q
B
A
] =
_
_
cosh sinh
sinh cosh
_
_
Il parametro che interviene nella rappresentazione (7.9) prende il nome di pseudoangolo
della rotazione. Esso pu` o variare da a +, ricoprendo tutte le rotazioni ortocrone.
Per = 0 si ha ovviamente R = 1. La composizione di due rotazioni di pseudoangolo
1
e
2
`e la rotazione di pseudoangolo
1
+
2
; lo si desume dalla (7.9) utilizzando le propriet` a
elementari delle funzioni trigonometriche iperboliche. Sempre in base a tali propriet` a, si
osserva che si pu` o scegliere come parametro rappresentativo la tangente iperbolica dello
pseudoangolo,
(7.11) = tanh =
sinh
cosh
,
variabile nellintervallo aperto (1, 1). La (7.9) diventa allora
(7.12) [Q
B
A
] =
1
_
1
2
_
_
1
1
_
_
.
7.2 Lo spazio-tempo di Minkowski
La meccanica classica (o newtoniana) postula lesistenza di un tempo assoluto e di una
classe particolare di riferimenti (i riferimenti inerziali o galileiani) rispetto ai quali una par-
ticella libera da vincoli e isolata (non soggetta cio`e ad alcuna sollecitazione) si muove di
284 Capitolo 7. Meccanica relativistica
moto rettilineo uniforme. Postula inoltre linvarianza delle leggi della meccanica in questi
riferimenti (principio di relativit` a galileiana). Di conseguenza le leggi della meccani-
ca ammettono una formulazione assoluta, cio`e indipendente dalla scelta del riferimento,
nellinsieme degli eventi dotato di una struttura di spazio ane a quattro dimensioni: lo
spazio-tempo di Newton. I moti inerziali, cio`e i moti dei punti liberi e isolati, sono
rappresentati da rette nello spazio-tempo ed il tempo assoluto denisce un fogliettamento
di sottospazi ani tridimensionali di eventi contemporanei.
La meccanica relativistica (o einsteiniana) postula ancora lesistenza dei riferimenti iner-
ziali ma abbandona lidea di un tempo assoluto, assumendo invece che ogni riferimento
inerziale sia dotato di un suo tempo (il tempo relativo). Allinvarianza rispetto alla scel-
ta del riferimento dellintervallo temporale t(P)t(O) di due eventi (O, P) viene sostituita
linvarianza della quantit` a
(7.13) |OP| = [OP[
2
s
c
2
[OP[
2
t
,
detta intervallo spazio-temporale. Qui il simbolo [OP[
s
indica la distanza spaziale
relativa al riferimento dei due eventi e il simbolo [OP[
t
= t(P) t(O) il loro interval-
lo temporale relativo. Inoltre c `e una costante universale (la velocit` a della luce nel
vuoto). Pi` u precisamente, se in due riferimenti (o laboratori) inerziali diversi R e R
si
misurano con strumenti dello stesso tipo distanze spaziali s ed s
e tempi relativi t e t
rispettivamente, allora si ha
[OP[
t
= [OP[
t
[OP[
2
s
c
2
[OP[
2
t
= [OP[
2
s
c
2
[OP[
2
t
in meccanica newtoniana,
in meccanica relativistica.
Lesistenza dei riferimenti inerziali e dei moti inerziali porta ancora ad assumere per lo
spazio-tempo M della meccanica einsteiniana una struttura di spazio ane a quattro
dimensioni. Inoltre linvarianza dellintervallo spazio-temporale (7.13) si traduce nelle-
sistenza su M (cio`e sullo spazio vettoriale soggiacente) di un tensore metrico g tale che
|OP| `e proprio la norma del vettore OP. Questo tensore metrico `e iperbolico, cio`e di
segnatura (3,1). Infatti, se in un riferimento inerziale consideriamo coordinate cartesiane
ortonormali (x, y, z) aventi origine nel punto dove si verica levento O ed il tempo relativo
t si misura a partire dallo stesso evento O, allora ogni altro evento P `e determinato dalle
coordinate spazio-temporali (x, y, z, t) ed inoltre
[OP[
2
s
= x
2
+ y
2
+z
2
, [OP[
2
t
= t
2
.
Di conseguenza
(7.14) |OP| = x
2
+ y
2
+ z
2
c
2
t
2
.
Dunque la metrica ha segnatura (3,1).
Possiamo allora sintetizzare tutte le precedenti considerazioni nel seguente
Principio: lo spazio-tempo M della relativit` a ristretta, detto spazio-tempo di Minko-
wski, `e uno spazio ane iperbolico a quattro dimensioni.
7.2. Lo spazio-tempo di Minkowski 285
Adotteremo le seguenti convenzioni riguardanti i riferimenti ani in M. Conformemente
a quanto fatto al 7.1, denoteremo con
(e
A
) = (e
0
, e
i
) = (e
0
, e
1
, e
2
, e
3
) = (e
0
, i, j, k)
una generica base canonica, dove
|e
0
| = 1, |e
i
| = 1.
Gli indici latini maiuscoli assumeranno quindi i valori (0, 1, 2, 3), quelli minuscoli i valori
(1, 2, 3). La matrice delle componenti del tensore metrico g
AB
= e
A
e
B
assume la forma
canonica
(7.15) [g
AB
] =
_
_
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
_
_
.
Denoteremo con
(x
A
) = (x
0
, x
i
) = (x
0
, x
1
, x
2
, x
3
) = (x
0
, x, y, z)
le corrispondenti coordinate cartesiane ortonormali aventi origine in un punto (evento)
O M. Pertanto per ogni punto P
OP = x
A
e
A
= x
0
e
0
+ x
i
e
i
= x
0
e
0
+ x i +y j +z k
e
|OP| = (x
0
)
2
+ x
2
+y
2
+z
2
.
Dal confronto di questultima uguaglianza con la (7.14) si osserva che conviene porre
(7.16) x
0
= c t.
Come si vede da queste premesse, e come sar` a ulteriormente precisato nel seguito, un verso-
re del genere tempo e
0
individua un riferimento inerziale
1
e, con la (7.16), il corrispondente
tempo relativo t.
Passiamo ora a denire gli enti cinematici fondamentali del moto di un punto. Nello spazio-
tempo il moto di una particella `e una successione di eventi (la sua storia) rappresentabile
con una curva di equazione parametrica vettoriale
(7.17) OP = R().
Ad ogni valore del parametro corrisponde il vettore posizione R() dellevento P()
rispetto ad un pressato evento di riferimento O. Questo parametro pu` o essere pensato
come tempo misurato da un orologio posseduto dalla particella. La scelta del parametro
non `e unica, ma noi assumeremo che sia tale da soddisfare alla seguente denizione:
1
`
E infatti del tutto arbitraria la scelta dei tre vettori ortonormali del genere spazio (ei) ortogonali a e
0
.
286 Capitolo 7. Meccanica relativistica
Definizione 7.2.1 La storia di una particella materiale `e una curva parametrizzata
tale che il vettore
(7.18) V =
dR
d
`e del genere tempo e soddisfa alla condizione di normalizzazione
(7.19) |V | = c
2
Il vettore V ed il parametro (denito a meno di una costante additiva) sono detti
rispettivamente velocit` a assoluta e tempo proprio della particella.
Nota 7.2.1 Occorre aggiungere una ulteriore convenzione: che tutte le particelle abbia-
no velocit` a assolute ortocrone, appartengano cio`e allinterno di una medesima falda del
cono di luce dello spazio vettoriale soggiacente a M. Chiamiamo questa falda futuro e la
denotiamo con T
+
(laltra falda T
sar` a chiamata passato). Ci` o signica che le velocit` a
assolute di due particelle, oltre alla condizione di normalizzazione (7.19), soddisfano anche
alla condizione di ortocronismo (si veda il 7.1)
(7.20) V
1
V
2
< 0.
Nota 7.2.2 La storia di una particella materiale `e dunque una curva del genere
tempo, cio`e tale che in ogni suo punto il vettore tangente `e del genere tempo. Questa
assunzione trova giusticazione nelle considerazioni seguenti. Per particella materiale
intendiamo una particella tale che in ogni evento della sua storia esiste un riferimento
inerziale in cui `e in quiete (un fotone, espressione della teoria particellare della luce, non
soddisfa a questa condizione). In un generico riferimento ane si ha
(7.21) V =
dx
0
d
e
0
+
dx
i
d
e
i
.
Dunque, per ogni pressato valore di deve esistere un riferimento nel quale
dx
i
d
= 0
(queste derivate rappresentano infatti le componenti della velocit` a relativa a quel riferi-
mento). Allora in quellistante
V =
dx
0
d
e
0
e quindi
(7.22) |V | =
_
dx
0
d
_
2
< 0.
Dunque V `e sempre del genere tempo. Per quel che riguarda invece la condizione di
normalizzazione (7.19) va osservato quanto segue. `e ragionevole assumere che per una
7.3. Riferimenti inerziali e tempo relativo 287
particella in quiete in un riferimento il tempo proprio coincida a meno di una costante
additiva col tempo relativo t, cio`e che si abbia sempre
dt
d
= 1. Allora dalla (7.21), tenuto
conto della (7.16), segue |V | = c
2
. Daltra parte, siccome per una particella materiale
qualsiasi esiste in ogni evento della sua storia un riferimento di quiete istantanea, `e
ragionevole assumere la condizione |V | = c
2
per tutti questi eventi.
Nota 7.2.3 Per ogni evento O M linsieme degli eventi P tali che |OP| = 0 (cio`e
tali che i vettori OP sono del genere luce) prende il nome di cono di luce in O. Questo
termine `e giusticato dalle considerazioni seguenti. Si supponga che levento O, origine di
un sistema di coordinate ani, corrisponda allaccensione di una lampada puntiforme al
tempo t = 0. Il fronte donda luminoso che si propaga nello spazio tridimensionale `e una
sfera centrata nellorigine e di raggio ct, dove c `e la velocit` a della luce. Esso ha quindi
equazione
x
2
+y
2
+ z
2
= c
2
t
2
.
Nello spazio-tempo questa `e lequazione di un cono di vertice lorigine e asse lasse x
0
. Gli
eventi P che si trovano sui vari fronti donda soddisfano quindi alla condizione
|OP| = x
2
+y
2
+z
2
c
2
t
2
= 0.
Il vettore OP `e pertanto isotropo. Si noti che questa `e una condizione assoluta, cio`e
indipendente dal riferimento, per linvarianza dellintervallo spazio-temporale. Si osservi
inoltre che ogni retta generatrice del cono rappresenta un raggio di luce emesso dallevento
O. Pertanto nello spazio-tempo i raggi luminosi nel vuoto sono rappresentati da rette
isotrope.
7.3 Riferimenti inerziali e tempo relativo
Possiamo ora precisare la nozione di riferimento e di tempo relativo. Un riferimento sico
R `e identicabile con un insieme continuo di particelle materiali ideali invadente (in tutto
o in parte) luniverso. Le storie di queste particelle vengono a formare nello spazio-tempo
M una congruenza di curve, cio`e un insieme di curve non intersecantisi, ricoprenti M in
tutto o in parte. I vettori velocit` a assoluta di queste particelle deniscono dunque un
campo vettoriale X su M soddisfacente alla condizione di normalizzazione
(7.23) |X| = c
2
.
Pertanto identicheremo un riferimento con un campo vettoriale X a valori in T
+
e sod-
disfacente alla (7.23). Le curve integrali di X sono le storie delle particelle del riferimento.
In particolare abbiamo che un riferimento `e inerziale se e solo se X `e costante. Infatti
questa condizione `e vericata se e solo se tutte le particelle del riferimento hanno storie
rettilinee. Diamo ora la generale denizione di tempo relativo ad un riferimento.
Definizione 7.3.1 Il tempo relativo ad un riferimento X `e una funzione t: M R
tale che
(7.24) dt =
1
c
2
, = X
.
288 Capitolo 7. Meccanica relativistica
Questa denizione ha senso perche, essendo lo spazio-tempo dotato di un tensore metrico,
ad ogni campo vettoriale X una 1-forma = X
tale che, per ogni vettore u,
(7.25) u, ) = u X.
Di conseguenza,
(7.26) X, dt) = 1
perche
X, dt) =
1
c
2
X, ) =
1
c
2
X X = 1.
Anche esista la funzione t, nel qual caso essa `e denita modulo una costante, `e necessario
e suciente che la 1-forma sia chiusa (lemma di Poincare: si osservi che M `e identicabile
con R
4
):
(7.27) d = 0.
Questa condizione `e senzaltro soddisfatta se X `e costante, cio`e se il riferimento `e inerziale.
Le proposizioni seguenti mostrano che la nozione di tempo relativo ora introdotta `e
coerente con quella gi` a utilizzata nei ragionamenti precedenti.
Teorema 7.3.1 Il tempo relativo ad un riferimento coincide (modulo una costante) col
tempo proprio delle particelle del riferimento.
Dimostrazione. Infatti la derivata del tempo relativo t rispetto al tempo proprio di
una particella del riferimento coincide con la derivata di t rispetto al campo vettoriale X,
quindi, per la (7.26),
dt
d
= X, dt) = 1. 2
Teorema 7.3.2 Le variet` a di contemporaneit` a t = costante sono ortogonali al cam-
po X cio`e alle storie delle particelle del riferimento. Esse sono variet` a tridimensionali
riemanniane, con metrica denita positiva.
Dimostrazione. Siccome dt ,= 0 le equazioni t = costante deniscono eetivamente delle
sottovariet` a tridimensionali di M. Ogni vettore u tangente ad una supercie t = costante `e
caratterizzato dalla condizione u, dt) = 0 che per la (7.24) e la (7.25) equivale a u X = 0.
Per dimostrare la seconda parte del teorema basta ricordare che in uno spazio vettoriale
iperbolico il sottospazio ortogonale ad un vettore del genere tempo `e strettamente euclideo.
2
Teorema 7.3.3 Se il riferimento rappresentato dal campo X `e inerziale allora il tempo
relativo denito dalla (7.24) `e tale che per ogni coppia (O, P) di eventi vale luguaglianza
(7.28) t(P) t(O) =
1
c
2
OP X.
Gli spazi ani tridimensionali ortogonali a X sono strettamente euclidei e rappresentano
gli insiemi degli eventi contemporanei rispetto al tempo relativo t.
7.4. Decomposizioni relative 289
Dimostrazione. In un qualunque sistema di coordinate ortonormali (x
A
) (A = 0, 1, 2, 3)
per sussiste la rappresentazione
=
A
dx
A
,
con le componenti
A
costanti. Si consideri su M la funzione
t =
1
c
2
A
x
A
.
Dierenziando si trova
dt =
1
c
2
A
dx
A
=
1
c
2
,
quindi t `e un tempo relativo. Inoltre, per ogni coppia di eventi (O, P),
t(P) t(O) =
1
c
2
A
(x
A
(P) x
A
(O)) =
1
c
2
OP, )
e la (7.28) `e soddisfatta. La seconda parte `e conseguenza diretta del teorema precedente.
2
Nota 7.3.1 Per i riferimenti inerziali nello spazio-tempo di Minkowski si possono ripe-
tere considerazioni analoghe a quelle svolte per i riferimenti inerziali nello spazio-tempo
di Newton. (i) Le storie delle particelle costituenti un riferimento inerziale X formano un
fascio di rette parallele al vettore X. (ii) Le variet` a M
s
costituite dagli eventi contem-
poranei (t = s) nel tempo relativo a quel riferimento sono gli spazi ani tridimensionali
euclidei ortogonali a X (Teorema7.3.3). (iii) Linsieme M
X
delle rette del fascio `e uno
spazio ane euclideo tridimensionale: esso rappresenta luniverso osservato dal riferimento
X. (iv) Lo spazio-tempo di Minkowski risulta di conseguenza identicabile nel prodotto
di due spazi ani euclidei: M M
X
R R
3
R. Appare evidente dalle considerazioni
precedenti, in particolare dallosservazione (iii), che la contemporaneit` a degli eventi `e un
concetto relativo, non assoluto. Questo fatto `e discusso nei dettagli pi` u avanti.
7.4 Decomposizioni relative
Dora innanzi considereremo solo riferimenti inerziali, ciascuno dei quali sar` a quindi rap-
presentato da un vettore X costante del genere tempo, orientato verso il futuro e norma-
lizzato (di norma uguale a c
2
). Denoteremo con o il sottospazio dei vettori ortogonali
ad X, i quali si diranno vettori spaziali rispetto a X. Per ogni vettore U sussister` a
una decomposizione relativa ad un riferimento X
U = u + X, u X = 0,
Il vettore u o e lo scalare si diranno rispettivamente parte spaziale e parte
temporale relativa a X di U.
Per il vettore posizione OP = R() di una particella materiale nello spazio-tempo M
sussiste la decomposizione relativa
(7.29) R = r +X, r X = 0.
290 Capitolo 7. Meccanica relativistica
La parte spaziale r rappresenta il vettore posizione della particella nello spazio ane
tridimensionale euclideo M
X
rappresentante lo spazio sico osservato dal riferimento. La
parte temporale rappresenta lintervallo temporale relativo perche per la (7.28) e per la
(7.29)
(7.30) t(P) t(O) =
1
c
2
R X = .
Se si pensa R funzione del tempo proprio attraverso il tempo relativo t si trova
V =
dR
dt
dt
d
=
dt
d
_
dr
dt
+ X
_
,
cio`e
(7.31) V = (v + X)
posto
(7.32) v =
dr
dt
e
(7.33) =
dt
d
La (7.31) `e la decomposizione relativa della velocit` a assoluta. Dalla (7.32) si osserva
che il vettore spaziale v `e la velocit` a relativa al riferimento X. Lo scalare prende il
nome di fattore di Lorentz. Oltre che dalla (7.33) esso `e anche denito dalluguaglianza
(7.34) =
1
c
2
V X
ottenuta moltiplicando scalarmente la (7.31) per X. Siccome i vettori velocit` a assoluta
sono per convenzione ortocroni, si ha V X < 0 e quindi > 0.
Nota 7.4.1 Moltiplicando ambo i membri della (7.31) per se stessi si trova
2
(c
2
v
2
) =
c
2
quindi, essendo > 0,
(7.35) =
1
_
1
v
2
c
2
dove v `e la velocit` a scalare relativa al riferimento inerziale scelto. Di qui segue la limita-
zione
(7.36) v < c
imposta alle velocit` a relative delle particelle materiali e la limitazione
(7.37) 1
per il fattore di Lorentz. Si ha = 1 solo per gli eventi di istantanea quiete nel riferimento.
7.4. Decomposizioni relative 291
_
`
Figura 7.3: Il fattore di Lorentz (graco superiore) e il
suo inverso
1
(graco inferiore), con x =
v
c
.
Nota 7.4.2 Il paradosso dei gemelli. Si noti bene che il tempo relativo ad un
riferimento `e una funzione reale denita su tutto lo spazio-tempo, t: M R, e che invece
il tempo proprio di una particella pu` o essere visto come una funzione denita lungo la
storia di questa. Dalle (7.33) e (7.37) segue che
dt
d
1.
Ci` o mostra che lungo la storia di una particella non in quiete rispetto ad un riferimento
inerziale X il tempo relativo al riferimento cresce pi` u rapidamente del tempo proprio della
particella. Una conseguenza `e che al ritorno sulla Terra, dopo un viaggio interplanetario
di lunga durata e ad alta velocit` a, un astronauta risulta essere pi` u giovane del fratello
gemello rimasto sul pianeta: il suo orologio, sincronizzato al momento della partenza con
un orologio di egual tipo posseduto dal gemello, segna un tempo trascorso pari a
=
1
t =
_
1
v
2
c
2
t
dove t `e il tempo trascorso sulla Terra. Si suppone, per la validit` a di questa formula, che
il viaggio avvenga a velocit` a scalare costante v rispetto al riferimento inerziale denito dal
sistema solare, nel quale la Terra si muove con velocit` a decisamente trascurabile rispetto
a quella della luce. Nel caso di una velocit` a pari a v =
c
10
= 30.000 Km/sec il fattore di
Lorentz `e di circa = 1, 005 e quindi
1
= 0, 99498 circa. Se lintervallo di tempo t
`e di 50 anni ( 18.262 giorni) la dierenza con `e comunque soltanto di 91 giorni.
Landamento del fattore di Lorentz `e illustrato in Figura 7.3.
292 Capitolo 7. Meccanica relativistica
Si consideri ora la decomposizione relativa di un intervallo assoluto OP di due
eventi di M. Si ponga cio`e
(7.38) OP = r +X, r X = 0.
La parte spaziale r `e lintervallo spaziale relativo al riferimento e lo scalare `e
lintervallo temporale relativo (si veda la (7.30)):
(7.39) =
1
c
2
OP X = t(P) t(O).
Se r = 0 i due eventi O e P sono spazialmente coincidenti, avvengono cio`e nel me-
desimo luogo rispetto al riferimento. Se = 0 allora essi sono contemporanei rispetto
al riferimento. Se > 0, cio`e se t(P) > t(Q), si dice che P segue (o `e successivo a) O
nella cronologia determinata dal riferimento. Consideriamo sparatamente i due casi in cui
lintervallo assoluto OP `e del genere tempo oppure del genere spazio.
Teorema 7.4.1 Se OP `e del genere tempo ed orientato verso il futuro (OP T
+
) allora
esiste un riferimento in cui i due eventi avvengono nel medesimo luogo e inoltre levento
P `e successivo a O in ogni riferimento (si dice che P appartiene al futuro assoluto di
O).
Dimostrazione. Se OP `e del genere tempo si pu` o porre OP = X con X T
+
,
|X| = c
2
e > 0. Allora X denisce un riferimento inerziale in cui r = 0, nel quale
cio`e gli eventi occorrono nel medesimo luogo. Per ogni altro riferimento X
si ha, tenuto
conto della (7.39),
= t
(P) t
(O) =
1
c
2
OP X
=
1
c
2
X X
> 0
essendo > 0 e X X
< 0 per lortocronismo dei vettori rappresentanti i riferimenti.
Ci` o prova che P segue O in ogni riferimento. 2
Teorema 7.4.2 Se OP `e del genere spazio allora esiste un riferimento rispetto al quale
gli eventi O e P sono contemporanei. La relazione temporale tra i due eventi dipen-
de dal riferimento: a seconda della scelta di questo levento P pu` o precedere o essere
contemporaneo o seguire levento O.
Dimostrazione. Se OP `e del genere spazio esiste certamente un vettore del genere
tempo ad esso ortogonale, quindi un riferimento X tale che OP X = 0. Quindi rispetto
al riferimento X i due eventi sono contemporanei. Nel 2-piano iperbolico generato dai
vettori OP e X si pu` o sempre scegliere un vettore X
rappresentante un riferimento,
quindi tale che X X
< 0 e |X
| = c
2
, tale da soddisfare alla condizione OP X
< 0,
cos` come se ne pu` o scegliere un altro X
tale che OP X
> 0. 2
Nella Figura 7.4 le linee tratteggiate rappresentano il fogliettamento ortogonale a X
degli
eventi contemporanei secondo il tempo t
relativo a questo riferimento; quelle a punto e
tratto rappresentano il fogliettamento ortogonale a X
, di tempo relativo t
. Seguendo il
tempo relativo t
si osserva che levento O precede P, mentre nel tempo relativo t
levento
O segue P.
7.4. Decomposizioni relative 293
_
`
t
t
O
P
X
X
...........................................................................................................................................................................................................................................................................................................................................................................................................................................
...........................................................................................................................................................................................................................................................................................................................................................................................................................................
...........................................................................................................................................................................................................................................................................................................................................................................................................................................
...........................................................................................................................................................................................................................................................................................................................................................................................................................................
...........................................................................................................................................................................................................................................................................................................................................................................................................................................
Figura 7.4: Diverse cronologie per diversi riferimenti.
Nota 7.4.3 La circostanza che i due eventi (O, P) possano avere relazione cronologica
invertita a seconda della scelta del riferimento pu` o suscitare perplessit` a, per leventuale
sussitenza di una relazione di causa-eetto tra gli eventi stessi. Una tale relazione `e
tuttavia esclusa se si assume il seguente principio di causalit` a: due eventi (O, P) sono
in relazione di causa-eetto se e solo se sono connessi da storie, cio`e da archi di curve del
genere tempo. Da questo principio segue che se due eventi O e P sono collegati da storie
allora il vettore OP `e necessariamente del genere tempo e quindi, per il Teorema 7.4.1, vi
`e una relazione cronologica assoluta fra i due eventi. Sia infatti R() una curva del genere
tempo tale che OP
0
= R(
0
) e OP
1
= R(
1
) con
1
>
0
. Allora, posto che la velocit` a
assoluta V () `e la derivata di R(), si ha
P
0
P
1
= R(
1
) R(
0
) =
_
1
0
V () d.
Daltra parte la somma di due vettori V
1
e V
2
del genere tempo ed entrambi orientati
nel futuro `e ancora un vettore del genere tempo ed orientato nel futuro. Quindi anche
lintegrale precedente d` a luogo ad un vettore del genere tempo orientato nel futuro. Alla
stessa conclusione si giunge se O e P sono congiunti da pi` u storie: levento P appartiene
al futuro assoluto di O, cio`e sta allinterno del cono di luce originato in O Figura 7.5.
294 Capitolo 7. Meccanica relativistica
_
`
Figura 7.5: Levento P sta nel futuro di O
7.5 Le trasformazioni di Lorentz
Si considerino nello spazio-tempo di Minkowski due riferimenti inerziali X e X
. Sicco-
me questi vettori rappresentano le velocit` a assolute delle particelle inerziali dei rispettivi
riferimenti, se ne possono considerare le reciproche decomposizioni relative. Per esempio
(7.40) X
= (u+X), u X = 0
dove
(7.41) =
1
c
2
X
X =
_
1
u
2
c
2
_
1
2
e u
2
= |u| = u u, `e la decomposizione della velocit` a assoluta X
rispetto a X. La
parte spaziale u, essendo la velocit` a delle particelle del riferimento X
rispetto a X, ha il
signicato di velocit` a di trascinamento. Scambiando il ruolo dei due riferimenti, posto
cio`e
(7.42) X =
(u
+X
), u
= 0,
(7.43)
=
1
c
2
X X
=
_
1
u
2
c
2
_
1
2
e confrontando la (7.41) con la (7.43) si osserva che
(7.44) =
7.5. Le trasformazioni di Lorentz 295
e quindi che
(7.45) u
2
= u
2
Pertanto:
Teorema 7.5.1 Le due velocit` a di trascinamento determinate da due riferimenti hanno
uguale intensit` a.
Nota 7.5.1 Si noti che a questo risultato, ovvio nellambito della cinematica classica,
non corrisponde lanaloga classica relazione tra le velocit` a di trascinamento, una opposta
allaltra: u = u
. Leliminazione del vettore X
dal sistema di equazioni (7.40) e (7.42)
porta infatti alluguaglianza
(7.46) u
= u+
_
1
_
X.
Poiche per la (7.41) si ha
(7.47) 1
1
2
=
u
2
c
2
,
si pu` o anche scrivere
(7.48) u
=
_
u +
u
2
c
2
X
_
.
La (7.48) mostra che u
ha componente positiva rispetto a X.
Si consideri ora lintervallo assoluto OP di sue eventi decomposto rispetto ai due riferi-
menti:
(7.49) OP = r + X = r
.
Moltiplicando scalarmente questuguaglianza con la (7.40),
X
(r
) = (u+X) (r + X),
si deduce la formula
(7.50)
=
_
r u
c
2
_
.
Se si introduce la distanza nella direzione di trascinamento dei due eventi
(7.51) =
r u
u
con
u = [u[ =
_
|u| > 0,
allora la relazione precedente si scrive
(7.52)
=
_
u
c
2
_
Si ha cos` il legame tra gli intervalli temporali relativi dei due eventi.
296 Capitolo 7. Meccanica relativistica
Nota 7.5.2 La dilatazione dei tempi. Si supponga che gli eventi O e P avvengano
nel medesimo luogo rispetto al riferimento X, cio`e che sia r = 0. Allora dalla (7.50) segue
(7.53)
= .
Siccome > 1 (infatti = 0 `e escluso perche X ,= X
) dalla (7.53) segue
> .
Pertanto: lintervallo temporale di due eventi relativo al riferimento in cui sono spazial-
mente coincidenti (perche questo esista deve essere OP del genere tempo, Teoremi 7.4.1 e
7.4.2) `e sempre inferiore allintervallo temporale relativo ad un qualunque altro riferimento.
Questo fenomeno `e chiamato dilatazione dei tempi.
Esempio 7.5.1 Unastronave viaggia di moto inerziale nel cosmo con velocit` a u costante
rispetto al riferimento inerziale solare (Sole e stelle sse) X
. Anche lastronave denisce
un riferimento inerziale X. Su questa viene osservato un fenomeno o un processo della
durata di secondi. Gli eventi nali ed iniziali di questo processo avvengono nello stesso
luogo rispetto al riferimento X. Osservati dal riferimento solare (per esempio dalla Terra)
questi due eventi hanno un intervallo temporale pari a
= > .
Dalla (7.52) per simmetria segue, tenuto conto della (7.44) e della (7.45),
(7.54) =
_
c
2
_
e quindi
+
u
c
2
.
Combinando questuguaglianza con la (7.52) si trova
_
(1
1
2
)
u
c
2
_
=
u
c
2
.
Stante lidentit` a (7.47) si conclude che
(7.55)
= (u ).
Si ottiene cos` il legame tra le distanze spaziali dei due eventi nella direzione delle velocit` a
di trascinamento.
Nota 7.5.3 Contrazione delle lunghezze. Si supponga che gli eventi siano contem-
poranei in X: = 0. Dalla (7.55) segue
(7.56)
= ,
7.5. Le trasformazioni di Lorentz 297
e quindi
[
[ > [[.
Pertanto: la distanza spaziale di due eventi contemporanei in un riferimento X, misura-
ta nella direzione della velocit` a di trascinamento di un qualunque altro riferimento X
,
`e inferiore allanaloga distanza spaziale misurata in X
. Questo fenomeno `e chiamato
contrazione delle lunghezze.
Esempio 7.5.2 Unesperienza ideale classica che di solito si cita per illustrare il fe-
nomeno della contrazione delle lunghezze `e la seguente. Unasta rigida si muove lungo
una guida rettilinea di moto uniforme con velocit` a u. La guida `e ssa in un riferimento
inerziale X e quindi anche lasta denisce un riferimento inerziale X
. Uno sperimentatore
fermo nel riferimento X della guida misura la lunghezza dellasta in moto. Per far questo
rileva la posizione contemporanea dei due estremi dellasta in un dato istante, consideran-
do due eventi per lui contemporanei collocati in tali estremi (per esempio, laccensione di
due lampade), e ne misura la distanza . Per un osservatore posto nel riferimento solidale
X
la distanza spaziale dei due eventi `e la lunghezza propria dellasta. Siamo nelle
condizioni di poter applicare la (7.45). Pertanto: la lunghezza dellasta misurata da un
osservatore rispetto al quale lasta `e in moto (rettilineo uniforme) risulta sempre minore
della sua lunghezza propria.
Nota 7.5.4 Trasformazioni di Lorentz. Diciamo che un sistema di coordinate or-
tonormali (x
A
) `e adattato ad un riferimento X se la base dei vettori (e
A
) `e tale che
X = c e
0
. In questo caso x
0
= ct dove t `e il tempo relativo al riferimento, con t(O) = 0,
essendo O lorigine delle coordinate. Si considerino due sistemi di coordinate (x
A
) e (x
A
)
adattate ai due riferimenti X e X
ed aventi la stessa origine O. Posto (e
i
) = (i, j, k) e
(e
i
) = (i
, j
, k
), si scelgano i vettori i e i
nel 2-spazio generato dai vettori X e X
e
(7.57) j = j
, k = k
.
Siccome X
`e complanare alla coppia di vettori ortogonali (i, X) Figura 7.6 (a) la
decomposizione relativa (7.40) mostra che il vettore u, che `e ortogonale a X, deve essere
parallelo a i. Supponiamo che sia
(7.58) u = u i
con u > 0 (se non `e cos` basta invertire i). Ci` o signica che la velocit` a di trascinamento
di X rispetto a X
`e parallela e concorde al versore i. Tenuto inoltre conto che il vettore
u
, che deve essere parallelo a i
, ha componente positiva rispetto a X (Nota 7.5.1), si
pu` o scegliere i
in modo che si abbia si veda ancora la Figura 7.6(a),
(7.59) u
= u i
.
La scelta cos` fatta per i due riferimenti cartesiani adattati equivale, nella visione tridimen-
sionale, a scegliere gli assi omologhi fra loro paralleli ed equiorientati, con lasse x scorrevole
su se stesso con velocit` a positiva u Figura 7.6 (b). Si noti per` o che mentre nella visione
298 Capitolo 7. Meccanica relativistica
spazio-temporale, a cui per principio dobbiamo attenerci, gli assi x e x
non coincidono,
nella visione tridimensionale (che `e imperfetta) gli assi coordinati x e x
sono paralleli. Per
quel che riguarda i tempi, siccome per denizione si ha t(O) = t
(O) = 0, posto generica-
mente t = t(P) e t
= t
(P) per un qualunque evento P, risulta = t(P)t(O) = t ed ana-
logamente
= t
. Inoltre, stante la (7.58), dalla denizione (7.51) e da r = x i +y j +z k
segue = x. Analogamente dalla (7.59) segue
= x
. Le relazioni (7.52) e (7.55)
diventano pertanto
(7.60)
_
_
_
t
=
_
t
ux
c
2
_
x
= (x ut)
Queste equazioni, insieme alle uguaglianze
(7.61) y
= y, z
= z
dovute alle (7.57), forniscono i legami tra le coordinate cartesiane relative ai due riferi-
menti scelti. Nel loro complesso esse prendono il nome di trasformazioni standard di
Lorentz.
Nota 7.5.5 Le trasformazioni delle velocit` a. Data la storia di una particella, per
il vettore velocit` a assoluta sussiste la doppia decomposizione relativa
(7.62) V = (v +X) =
(v
+ X
).
Ricordata la denizione (7.34) del fattore di Lorentz, si ha successivamente:
=
1
c
2
V X
=
c
2
V (u + X) =
c
2
((v +X) u +V X)
= (1
u v
c
2
).
Di qui, per la denizione (7.33) del fattore di Lorentz, segue
(7.63)
=
dt
dt
,
posto
(7.64) =
_
1
u v
c
2
_
1
.
Alle (7.63) e (7.64) corrispondono per simmetria le uguaglianze analoghe
=
dt
dt
=
=
_
1
u
c
2
_
1
.
Dal loro confronto segue
(7.65)
=
2
.
7.5. Le trasformazioni di Lorentz 299
_
Figura 7.6: Cambiamento di riferimenti: X X
. (a) Il pia-
no (X, X
) nello spazio-tempo, (gli assi y = y
e z = z
sono
ortogonali a questo piano). (b) Rappresentazione nello spazio
tridimensionale.
300 Capitolo 7. Meccanica relativistica
Ci` o premesso, si osserva che dalla trasformazione di Lorentz (7.60)
2
segue, derivando
rispetto a t
:
dx
dt
=
dt
dt
dx
dt
=
d
dt
((x ut)) = (
dx
dt
u).
Operando allo stesso modo sulle (7.61) si vede che tra le componenti cartesiane delle
velocit` a relative ai due riferimenti intercorrono i seguenti legami:
(7.66) v
x
= (v
x
u), v
y
=
v
y
, v
z
=
v
z
.
7.6 Dinamica relativistica di una particella materiale
Anche in relativit` a ristretta lo schema dinamico pi` u semplice, adatto allo studio del moto
di corpi poco estesi, `e quello di punto o particella materiale. Un punto materiale
`e caratterizzato da un numero positivo m detto massa propria. Come in meccanica
newtoniana, assumiamo come principio che i moti di un punto materiale siano governati
da una equazione dinamica assoluta
(7.67) m
dV
d
= F
dove per la forza assoluta F `e postulata una legge di forza, cio`e una dipendenza dalla
posizione del punto nello spazio-tempo e dalla sua velocit` a assoluta:
(7.68) F = F(R, V ).
La derivata rispetto al tempo proprio della velocit` a assoluta `e laccelerazione assoluta
(7.69) A =
dV
d
e la legge (7.67) pu` o anche scriversi
(7.70) mA= F.
Essendo V a norma costante, laccelerazione assoluta `e ortogonale a V
(7.71) A V = 0
e quindi necessariamente del genere spazio. Pertanto:
Teorema 7.6.1 La legge di forza (7.68) deve essere tale da rendere il vettore forza
assoluta F sempre ortogonale alla velocit` a assoluta V :
(7.72) F(R, V ) V = 0.
Non sono ammissibili leggi di forza puramente posizionali, cio`e non dipendenti da V .
7.6. Dinamica relativistica di una particella materiale 301
Siamo allora condotti ad considerare il caso pi` u semplice di una legge di forza lineare
(7.73) F = F(V ),
interpretando F come endomorsmo lineare, dipendente dalla posizione del punto. Doven-
do essere per la (7.72) F(V ) V = 0, si conclude che F `e necessariamente un endomor-
smo antisimmetrico. Siccome si `e in presenza di un tensore metrico, cio`e di un prodotto
scalare, F pu` o anche essere intepretato come forma bilineare antisimmetrica ponendo
(7.74) F(V , U) = F(V ) U
per ogni coppia di vettori (V , U). Concludiamo pertanto che:
Teorema 7.6.2 La pi` u generale legge di forza lineare nella velocit` a assoluta `e rappre-
sentata da una forma bilineare antisimmetrica.
Il tipo di forza ora considerato si ritrova eettivamente in natura: `e la forza prodotta da un
campo elettromagnetico (nel vuoto) su di una particella carica. Per riconoscerlo occorre
esprimere lequazione assoluta del moto (7.67) e la legge di forza (7.73) in termini relativi
ad un generico riferimento inerziale. Cominciamo con lesaminare alcune conseguenze
algebriche della legge di forza (7.73).
Teorema 7.6.3 Assegnato un vettore X del genere tempo, tale che |X| = c
2
,
e considerato lo spazio vettoriale tridimensionale euclideo o dei vettori ortogonali a X,
ogni endomorsmo antisimmetrico F equivale ad una coppia (E, B) di vettori di o. (i)
Assegnato F, i due vettori sono determinati dalle equazioni
(7.75)
_
_
_
E = F(X)
B v = c (F(v) +
1
c
2
F(v) X X)
per ogni vettore v o, con prodotto vettoriale in o. (ii) Viceversa, assegnati i due
vettori, lendomorsmo F `e determinato da
(7.76)
_
_
F(V ) = (E
1
c
B v +
1
c
2
E v X)
V = (v + X), v X = 0
Nota 7.6.1 Interpretando il vettore X come rappresentante un riferimento inerziale
e il vettore V che compare nelle (7.76) come velocit` a assoluta (per cui v `e la velocit` a
relativa e il fattore di Lorentz, la (7.76)
1
esprime la decomposizione relativa della
forza assoluta nel caso lineare.
Dimostrazione. (i) Dato F, il vettore E denito dalla (7.75)
1
appartiene ad o perche
E X = F(X) X = 0 per lantisimmetria di F. Per ogni v o poniamo
(7.77) F
S
(v) = F(v) +
1
c
2
F(v) X X.
302 Capitolo 7. Meccanica relativistica
Si ha F
S
(v) o perche, essendo X X = c
2
,
F
S
(v) X = F(v) X F(v) X = 0.
`e pertanto denito un endomorsmo lineare F
S
: o o. Questo `e antisimmetrico perche
F
S
(v) v = F(v) v +
1
c
2
F(v) X X v = 0,
essendo F(v) v = 0 (perche F `e antisimmetrico) e X v = 0 (perche v o). Lantisim-
metria di F
S
equivale allesistenza di un vettore K o tale che K v = F
S
(v). Per la
successiva interpretazione sica conviene porre
(7.78) F
S
(v) =
1
c
B v.
Combinando questa uguaglianza con la (7.77) si trova la (7.75)
2
. (ii) Viceversa, deniti i
vettori come nelle (7.75), dalla (7.75)
2
si ricava
(7.79) F(v) =
1
c
B v +
1
c
2
E v X,
tenuto conto che F(v) X = F(X) v = E v. Di qui, applicando F ad un qualunque
vettore V decomposto come nella (7.76)
2
si ricava la (7.76)
1
. 2
Nota 7.6.2 Se si interpreta F
S
come forma bilineare antisimmetrica, allora questa
forma risulta la restrizione a o della forma bilineare antisimmetrica F. Di conseguenza il
vettore B denito dalla (7.78) `e, a meno del fattore c, il vettore aggiunto di F
S
:
(7.80) B = c F
S
.
Se si riportano le decomposizioni relative (7.76) nellequazione dinamica assoluta (7.67) si
prova che:
Teorema 7.6.4 In un riferimento inerziale lequazione dinamica assoluta (7.67) si
decompone nelle equazioni dinamiche relative
(7.81)
_
_
dp
dt
= E
1
c
B v
dm
r
dt
=
1
c
2
E v
posto
(7.82) m
r
= m, p = m
r
v
Dimostrazione. Tenuto conto che =
dt
d
dalla decomposizione relativa di una velocit` a
assoluta si ricava
dV
d
=
_
d(v)
dt
+
d
dt
X
_
.
Siccome m `e costante, per la (7.76)
1
lequazione (7.67) si spezza nelle (7.81). 2
7.6. Dinamica relativistica di una particella materiale 303
Nota 7.6.3 Lo scalare positivo m
r
= m prende il nome di massa relativa della
particella. Si noti che m
r
m, con m
r
= m se e solo se la velocit` a relativa `e nulla. Per
questo la massa propria m viene anche detta massa a riposo della particella. Il vettore
spaziale p prende il nome di impulso relativo della particella. Al vettore
(7.83) P = mV = p + m
r
X
si d` a il nome di impulso assoluto.
2
Nota 7.6.4 Il secondo membro dellequazione (7.81)
1
, cio`e il vettore
(7.84) F
r
= E
1
c
B v
prende il nome di forza relativa o forza di Lorentz.
`
E di questo tipo la forza che
un campo elettrico E ed un campo magnetico B (nel vuoto) esercitano su di una
particella dotata di carica unitaria. Qualora si vogliano interpretare le equazioni trovate
come equazioni della dinamica di una particella di carica elettrica e non unitaria (e massa
propria m) occorre sostituire i vettori (E, B) con (eE, eB), vale a dire F con eF.
Nota 7.6.5 Lequazione scalare (7.81)
2
`e conseguenza dellequazione vettoriale (7.81)
1
.
Infatti dalla (7.83), moltiplicata scalarmente per se stessa, si ricava m
2
c
2
= p
2
m
2
r
c
2
quindi il legame
(7.85) m
2
r
m
2
=
p
2
c
2
.
Derivando e tenendo conto della (7.81)
1
si trova
m
r
dm
r
dt
=
1
c
2
p
dp
dt
= m
r
1
c
2
v E,
cio`e la (7.81)
2
.
Nota 7.6.6 Se si introduce la quantit` a
(7.86) E
r
= m
r
c
2
la (7.81)
2
diventa
(7.87)
dE
r
dt
= E v.
Siccome il secondo membro `e la potenza della forza relativa,
F
r
v = E v,
la quantit` a E
r
ha il signicato di energia relativa della particella. Se la particella `e in
quiete questenergia si riduce alla energia propria
(7.88) E = mc
2
2
Nei testi di Fisica la massa a riposo di una particella `e di solito denotata con m
0
, mentre la massa relativa
`e denotata con m. Luguaglianza (7.82)
2
, scritta m = m
0
, viene interpretata come fenomeno di crescita
della massa col crescere della velocit`a della particella.
304 Capitolo 7. Meccanica relativistica
Nota 7.6.7 Lequazione di moto (7.81)
1
`e equivalente al sistema dinamico
(7.89)
_
_
dr
dt
= v,
dv
dt
=
1
m
_
1
v
2
c
2
g(E
1
c
B v
1
c
2
E v v g),
nelle incognite (r, v) posizione e velocit` a relative della particella, funzioni del tempo rela-
tivo t. In queste equazioni i vettori (E, B) devono intendersi come funzioni assegnate di
(r, t). Per dimostrare le (7.89) basta derivare p = m
r
v rispetto a t:
dp
dt
= v
dm
r
dt
+m
r
dv
dt
.
Di qui, isolando la derivata di v e tenendo conto di entrambe le (7.81) si ricavano le (7.89).
Il sistema dinamico (7.89) descrive dunque il moto di una particella materiale relativistica
in un qualunque riferimento inerziale, nel caso in cui la forza assoluta dipende linearmente
dalla velocit` a assoluta.
Esempio 7.6.1 Si consideri il caso in cui E = costante e B = 0. La seconda equazione
(7.89) coinvolge la sola funzione incognita v(t):
(7.90)
dv
dt
=
1
m
g(E
1
c
2
E v vg).
Di qui, moltiplicando vettorialmente per E (costante), si ricava
d
dt
(E v) =
1
mc
2
E v E v.
Ci` o mostra che la condizione E v = 0 `e invariante, cio`e che se `e soddisfatta allistante
iniziale `e sempre soddisfatta. Ci` o signica che se la velocit` a v `e inizialmente parallela a
E, lo `e sempre. Si consideri per semplicit` a questo caso. Lequazione (7.90) si riduce allora
ad una sola equazione scalare
(7.91) m
dv
dt
= E
x
_
1
v
2
c
2
_
3
2
,
posto
E = E
x
i, E
x
> 0, v = v i.
Si tratta di unequazione dierenziale a variabili separabili. Posto v = c sin la (7.91)
diventa
mc cos
d
dt
= E
x
cos
3
,
cio`e
d tan =
E
x
mc
dt.
7.6. Dinamica relativistica di una particella materiale 305
Lequazione (7.91) `e pertanto risolta implicitamente dalle equazioni
(7.92) v(t) = c sin(t), c(tan(t) tan
0
) =
E
x
m
t.
`e conveniente rappresentare questo risultato come nella Figura 7.7 che mostra come cresce
la velocit` a v al crescere di
1
m
E
x
t. La velocit` a tende asintoticamente a c (raggio della
circonferenza). Dalla similitudine dei due triangoli di vertice il centro della circonferenza
si deduce che
(7.93) v(t) =
c E
x
t
_
m
2
c
2
+E
2
x
t
2
.
Questa `e la soluzione della (7.91) con la condizione iniziale v(0) = 0. Posto ancora r = x i
con unintegrazione si ottiene
(7.94) x(t) =
mc
2
E
x
(sec sec
0
).
Infatti:
d sec = d
1
cos
= sin d tan =
v
c
E
x
mc
dt =
E
x
mc
2
dx,
per cui
dx =
mc
2
E
x
d sec .
Se si pone x(0) = 0 e quindi
0
= 0 dalla (7.94) si trae
(7.95) x(t) =
mc
2
E
x
(sec (t) 1) =
mc
2
E
x
g(
_
1 +
E
2
x
t
2
m
2
c
2
1g).
Si `e cos` completamente determinato il moto della particella inizialmente in quiete.
Esempio 7.6.2 Si consideri il caso B = costante e E = 0. La seconda delle (7.89)
diventa
(7.96)
dv
dt
=
1
mc
B v.
Moliplicando scalarmente per v si vede che sussiste lintegrale primo della velocit` a
(7.97) v
2
= costante.
Dunque i moti sono tutti uniformi. Moltiplicando invece scalarmente per B, che `e costante,
si trova lintegrale primo
(7.98) B v = costante.
306 Capitolo 7. Meccanica relativistica
_
....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... . . . . . . . . . . . . . . . . . . . . .
.... . . . .. .. .. .
. . . . . . . . . . .
.................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
........................................................................................................................................................................................................................................
............................................................................................................................................................................................................................................................................................................................................................................................................................................................................... ........................................................................................................................................................................................................................................................................................
......................................
(t)
v(t) x(t)
Ex
m
t
Figura 7.7: Crescita della velocit` a v(t) al crescere del
tempo t.
Dunque anche la componente della velocit` a nella direzione di B `e costante.
`
E pertanto
suciente studiare il moto in cui questa `e inizialmente nulla, cio`e il moto piano in cui la
velocit` a iniziale v
0
`e non nulla e ortogonale a B. Si ponga
B = Bi, v = v u,
con
B > 0, v > 0
e con i versore ortogonale al piano del moto e u versore ortogonale a i. Introdotto langolo
compreso tra u ed una retta ssa nel piano e orientato concordemente a i, risulta
dv
dt
= v
du
dt
= v
i u, B v = B v i u.
La (7.96) si riduce pertanto allequazione scalare
(7.99)
d
dt
=
B
mc
,
dove il secondo membro `e costante. Ci` o signica che la velocit` a v ruota nel piano con
velocit` a angolare costante, negativa rispetto al versore i, mantenendosi costante in modulo.
Segue che il moto `e circolare uniforme. Se invece la velocit` a iniziale non `e ortogonale a B
allora il moto `e elicoidale uniforme, con asse parallelo a B. Ritornando al caso del moto
circolare uniforme si osserva che il raggio r della traiettoria `e dato da
(7.100) r =
mcv
B
=
pc
B
.
Se infatti si considerano coordinate polari (r, ) centrate nel centro della traiettoria e
angolo concorde a i, osservato che v = r
e che
=
, la (7.100) segue direttamente dalla
(7.99).
7.7. Il campo elettromagnetico 307
7.7 Il campo elettromagnetico
Ritornando alla legge di forza lineare F = F(V ), consideriamo il caso in cui lendomor-
smo lineare F `e un campo sopra lo spazio-tempo M. Interpretato F come forma bilineare
antisimmetrica, `e conveniente, per le ragioni che ora si vedranno, considerare la 2-forma
(7.101) = c F
Si prendano in M coordinate cartesiane ortonormali (x
A
) di base (e
A
) e origine O, adattate
ad un riferimento inerziale di vettore X, per cui
(7.102) X = c e
0
Si consideri la rappresentazione della 2-forma nelle coordinate (x
A
):
(7.103)
_
_
_
=
1
2
AB
dx
A
dx
B
,
AB
= (e
A
, e
B
).
Dimostriamo che la matrice delle componenti
AB
della 2-forma assume la forma (il
primo indice A `e indice di colonna):
(7.104) [
AB
] =
_
_
0 E
1
E
2
E
3
E
1
0 B
3
B
2
E
2
B
3
0 B
1
E
3
B
2
B
1
0
_
_
dove (E
i
, B
i
) sono le componenti dei vettori (E, B) dello spazio o ortogonale a X, rap-
presentativi di F, quindi di , secondo la (7.104). Va osservato a questo proposito che,
essendo la base (e
i
) = (i, j, k) di o ortonormale, non vi `e dierenza tra componenti
covarianti e contravarianti dei vettori.
3
Infatti per la (7.76)
1
,
0i
= (e
0
, e
i
) =
1
c
(X, e
i
) =
1
c
(X) e
i
= E e
i
,
dunque
(7.105)
0i
= E
i
.
Inoltre si osserva che le
ij
sono le componenti della restrizione
S
di ai vettori di o.
Poiche si ha
S
= c F
S
, B = c F
S
,
3
In una base qualsiasi, posto E = E
i
ei e E
= Ei dx
i
, si ha Ei = E ei = gij E
j
, con gij = ei ej. In
una base ortonormale si ha gij = ij e quindi Ei = E
i
.
308 Capitolo 7. Meccanica relativistica
risulta
S
= B,
dunque, ricordando la denizione dellaggiunzione (5.10),
(7.106)
ij
= B
k
kij
.
La (7.104) `e cos` dimostrata. Il confronto coi testi di Fisica mostra che la matrice (7.104)
`e tipica della rappresentazione in componenti (covarianti) del campo elettromagnetico
.
Un ulteriore interessante aspetto matematico della teoria del campo elettromagnetico `e
messo in evidenza dalla propriet` a seguente:
Teorema 7.7.1 La chiusura della 2-forma ,
(7.107) d = 0
`e equivalente alle equazioni di Maxwell
(7.108)
_
_
div B = 0,
1
c
B
t
+ rot E = 0.
Dimostrazione. (i) La condizione di chiusura (7.107) si traduce in componenti nelle
equazioni (vedi (5.59))
BC
+
B
CA
+
C
AB
= 0.
Con la scelta (A, B, C) = (0, i, j) si trova lequazione
0 =
0
ij
+
i
j0
+
j
0i
=
0
ij
i
E
j
+
j
E
i
.
Siccome
i
E
j
j
E
i
sono le componenti del dierenziale dE
della 1-forma corrispondente
al campo vettoriale E, questultima equazione `e la traduzione in componenti dellequazione
intrinseca
S
dE
= 0.
Operando con laggiunzione e ricordando che dE
= rotE si trova la seconda delle
(7.108), osservato che
0
=
1
c
t
.
Con la scelta (A, B, C) = (h, i, j) si trova la condizione
ij
+
i
jh
+
j
hi
= 0,
cio`e d
S
= 0, che `e equivalente a d B = 0 cio`e a divB = 0. 2
7.7. Il campo elettromagnetico 309
Nota 7.7.1 La condizione di chiusura d = 0 implica, per il Lemma di Poincare,
lesistenza (locale) di una 1-forma potenziale tale che
(7.109) = d.
Il campo vettoriale corrispondente ammette una decomposizione relativa del tipo
(7.110)
= A+
1
c
X, A X = 0,
dove A `e detto potenziale vettore e potenziale scalare. In coordinate adattate al
riferimento si ha
(7.111) =
i
dx
i
+
0
dx
0
.
Dalluguaglianza X, ) =
X segue
0
= .
Daltra parte A
i
=
i
. La (7.109) `e allora equivalente alle equazioni
4
(7.112)
_
_
E =
1
c
A
t
+ grad,
B = rotA.
Infatti, siccome la (7.109) equivale a
AB
=
A
B
B
A
, ne risultano le uguaglianze
_
_
_
E
i
=
0i
=
0
0
=
0
i
+
i
,
B
k
=
kij
ij
=
kij
j
,
equivalenti alle (7.112).
Nota 7.7.2 Le (7.108) costituiscono in eetti la prima coppia delle equazioni di
Maxwell per il campo elettromagnetico. La seconda coppia `e
(7.113)
_
_
divD =
1
c
D
t
+
1
c
j = rot H
dove D `e linduzione elettrica, H il campo magnetico, j la corrente di carica e la
densit` a di carica. Anche queste equazioni sono la traduzione relativa ad un riferimento
inerziale di equazioni dierenziali assolute, coinvolgenti unaltra 2-forma . Sia una
2-forma su M di componenti
AB
e sia =
il campo tensoriale antisimmetrico di
componenti
AB
ottenute con linnalzamento degli indici tramite la matrice [g
AB
] inversa
della [g
AB
],
(7.114)
AB
= g
AC
g
BD
CD
.
4
Nei testi di Fisica si adotta di norma una convenzione che vede e quindi la coppia (A, ) cambiata di
segno.
310 Capitolo 7. Meccanica relativistica
Chiamiamo codierenziale di il campo vettoriale di componenti
(7.115) ()
B
=
A
AB
.
Questa denizione si estende immediatamente al caso di una p-forma di componenti
AB...C
. Il risultato delloperazione di codierenziale `e un campo tensoriale antisimmetrico
contravariante di ordine p 1. Se si procede ad un riabbassamento degli indici si riottiene
una p 1-forma. In particolare, nel caso p = 1 la denizione di codierenziale si riduce a
quella di divergenza di un campo vettoriale J (che `e un campo scalare)
(7.116) J =
A
J
A
.
Si pone in particolare f = 0 per ogni funzione (0-forma). Si noti che il codierenziale `e
nilpotente:
() =
B
AB
= 0,
perche la doppia derivata parziale `e simmetrica negli indici mentre le componenti
AB
sono antisimmetriche. Si pu` o dimostrare che la denizione data di codierenziale non
dipende dalla scelta della coordinate, purche queste siano coordinate cartesiane. Questa
denizione pu` o estendersi, con opportune avvertenze, a variet` a riemanniane. Dimostriamo
allora che
Teorema 7.7.2 Se i vettori (D, H) rappresentano nello spazio-tempo M la 2-forma
(nello stesso modo con cui (E, B) rappresentano ) allora la coppia di equazioni (7.113)
equivale allequazione
(7.117) =
1
c
J,
dove J `e il vettore corrente assoluta di carica, la cui decomposizione relativa `e
(7.118) J = j + X.
Dimostrazione. Analogamente alle (7.105) e (7.106) si ha
0i
= D
i
,
ij
= H
k
kij
,
quindi
ij
=
ijk
H
k
.
Va osservato che la matrice inversa [g
AB
] ha la stessa forma (7.102) della matrice [g
AB
],
per cui
0i
= g
00
g
ij
0j
= D
i
.
Inoltre la (7.118) pu` o scriversi J = J
0
e
0
+ j, e moltiplicando scalarmente per X queste
due scritture si trova J X = c
2
= c J
0
, per cui
J
0
= c .
7.7. Il campo elettromagnetico 311
Pertanto, traducendo in componenti lequazione (7.117), si trova
1
c
J
0
=
A
A0
=
i
i0
=
i
D
i
= divD,
1
c
J
i
=
A
Ai
=
0
0i
+
j
ji
=
0
D
i
jik
j
H
k
=
0
D
i
+
ijk
j
H
k
.
Di qui segue lequivalenza con le (7.113). 2
Per le due 2-forme (, ) rappresentatrici del campo elettromagnetico e per il cam-
po vettoriale J occorre postulare delle equazioni costitutive atte a rappresentare le
caratteristiche siche del mezzo in cui ha sede il campo. Per il vuoto si assume
= ,
quindi
D = E, H = B.
Il vettore J rappresenta la corrente di cariche sorgenti del campo elettromagnetico. Nel
caso di una corrente di convezione si ha
(7.119) J =
0
V
dove V `e la velocit` a assoluta delle particelle e
0
`e la densit` a di carica propria. La
decomposizione relativa (7.118) assume allora la forma
(7.120) J = (v + X), =
0
.
Essendo
2
= 0, dalla (7.117) segue lequazione
(7.121) J = 0
che prende il nome di equazione di continuit` a della carica. In un riferimento inerziale
si riduce allequazione
(7.122)
t
+ div( v) = 0
Questa `e immediata conseguenza della decomposizione relativa di una velocit` a assoluta:
0 =
A
J
A
=
A
(
0
V
A
) =
0
(
0
V
0
) +
i
(
0
V
i
)
=
0
(
0
c) +
i
(
0
v
i
).
S-ar putea să vă placă și
- Meccanica Dei Fluidi - Lezioni Di FluidodinamicaDocument286 paginiMeccanica Dei Fluidi - Lezioni Di FluidodinamicaMauro MenchiniÎncă nu există evaluări
- Macchine Dispense PerettoDocument164 paginiMacchine Dispense PerettoKKÎncă nu există evaluări
- Biomatematica2 PDFDocument320 paginiBiomatematica2 PDFandrew wallenÎncă nu există evaluări
- Reattori CataliticiDocument28 paginiReattori CataliticijeinerÎncă nu există evaluări
- Appunti Sistemi Di Volo P. MaggioreDocument53 paginiAppunti Sistemi Di Volo P. MaggioreLorenzo RossiÎncă nu există evaluări
- La Sicurezza Dei Sistemi Di Tenuta ESAFSADocument57 paginiLa Sicurezza Dei Sistemi Di Tenuta ESAFSADaniele ManieroÎncă nu există evaluări
- Esercitazioni Di Centrali TermoelettricheDocument141 paginiEsercitazioni Di Centrali TermoelettricheAndrea AtzeniÎncă nu există evaluări
- Instabilità Termoacustiche in Un CondottoDocument118 paginiInstabilità Termoacustiche in Un CondottoFrancis ShortlegÎncă nu există evaluări
- Guida - N37 - Corso Di Laurea in Ingegneria Chimica1280923280964Document24 paginiGuida - N37 - Corso Di Laurea in Ingegneria Chimica1280923280964Tommaso SantagataÎncă nu există evaluări
- Fenomeni Di Trasporto in Sistemi BiomediciDocument19 paginiFenomeni Di Trasporto in Sistemi BiomediciSanderÎncă nu există evaluări
- Compressori CentrifughiDocument35 paginiCompressori CentrifughibobtvcmvljyxazlkmbÎncă nu există evaluări
- Turbo Compressor IDocument68 paginiTurbo Compressor IWilliam MoscaÎncă nu există evaluări
- Turbine AssialiDocument44 paginiTurbine Assialiannalisa.d.orazio5738Încă nu există evaluări
- Il Teorema Di BernoulliDocument17 paginiIl Teorema Di BernoulliPaolo AnzilÎncă nu există evaluări
- Fisica Matematica PDFDocument386 paginiFisica Matematica PDFMarco TrentiÎncă nu există evaluări
- Appunti FluidodinamicaDocument19 paginiAppunti Fluidodinamicaengbonom9945Încă nu există evaluări
- Generazione Per Inviluppo Di Ruote Dentate Ad Evolvente - GM PDFDocument44 paginiGenerazione Per Inviluppo Di Ruote Dentate Ad Evolvente - GM PDFmgualdiÎncă nu există evaluări
- Esercizi IC1 9 CFUDocument57 paginiEsercizi IC1 9 CFUTutti Ganti A PezziÎncă nu există evaluări
- Catalogo Hvac 2015Document348 paginiCatalogo Hvac 2015VisitOn.T.witte.rÎncă nu există evaluări
- Costruzione Di Macchine 2 - DispensaDocument168 paginiCostruzione Di Macchine 2 - DispensalucaverdeÎncă nu există evaluări
- Fenomeni Di Trasporto - Parte 1Document128 paginiFenomeni Di Trasporto - Parte 1Francesco TrevisanÎncă nu există evaluări
- Indice Appunti Analisi 2Document2 paginiIndice Appunti Analisi 2francimoraÎncă nu există evaluări
- Edoardo Sernesi Geometria 1Document476 paginiEdoardo Sernesi Geometria 1Giovanni BorsellinoÎncă nu există evaluări
- Istituzioni Di Fisica Teorica - E.Onofri, C.DestriDocument567 paginiIstituzioni Di Fisica Teorica - E.Onofri, C.DestriMario Cacasenno100% (1)
- INVILUPPI GuiggianiDocument44 paginiINVILUPPI GuiggianiIam NooneÎncă nu există evaluări
- Appunti Trasmissione Del Calore 3 PDFDocument310 paginiAppunti Trasmissione Del Calore 3 PDFMaxÎncă nu există evaluări
- Scambiatori Di CaloreDocument155 paginiScambiatori Di Calorevarani77Încă nu există evaluări
- Fondamenti Di Elettrochimica - MussiniDocument308 paginiFondamenti Di Elettrochimica - MussiniflexÎncă nu există evaluări
- Simulaz 02Document26 paginiSimulaz 02Graziano SpanoÎncă nu există evaluări
- Reattori IdealiDocument31 paginiReattori IdealiGaetano ContinilloÎncă nu există evaluări
- Tecnologie Meccaniche e Applicazioni 2Document32 paginiTecnologie Meccaniche e Applicazioni 2Matteo PanciroliÎncă nu există evaluări
- Macchine Motrici IdraulicheDocument38 paginiMacchine Motrici Idraulicheomar2974Încă nu există evaluări
- PirolisiDocument12 paginiPirolisiacidexp66Încă nu există evaluări
- (Meccanica Applicata Alle Macchine) Meccanica Delle VibrazioniDocument112 pagini(Meccanica Applicata Alle Macchine) Meccanica Delle VibrazioniFedericoCÎncă nu există evaluări
- Ariete Michaud AllieviDocument1 paginăAriete Michaud Allievibefana63Încă nu există evaluări
- Macchine 05 PDFDocument32 paginiMacchine 05 PDFbrufraÎncă nu există evaluări
- Guida Ingegneria Aa0809 1Document102 paginiGuida Ingegneria Aa0809 1Cristian CurròÎncă nu există evaluări
- Fenomeni Di TrasportoDocument26 paginiFenomeni Di TrasportoMarco L. LanteriÎncă nu există evaluări
- Scambiatori Di CaloreDocument64 paginiScambiatori Di CaloreemilioÎncă nu există evaluări
- Scambiatori Di CaloreDocument24 paginiScambiatori Di CaloreFILIPPOÎncă nu există evaluări
- TesifrancescotestaDocument99 paginiTesifrancescotestaapi-238552956Încă nu există evaluări
- Goglio Comportamento Meccanico Dei MaterialiDocument102 paginiGoglio Comportamento Meccanico Dei MaterialiWilliam MoscaÎncă nu există evaluări
- 9788854823976Document16 pagini9788854823976Jack FlashÎncă nu există evaluări
- GasdinamicaDocument82 paginiGasdinamicazeus8484100% (1)
- ITA Teoria Dei Campi L Landau E LifchitzDocument194 paginiITA Teoria Dei Campi L Landau E LifchitzMario SilvaniÎncă nu există evaluări
- Fatica OligociclicaDocument32 paginiFatica OligociclicaFerruccio Rossi100% (1)
- Oleodinamica Sulle Navi - AAVV, Assembled by LionsquidDocument17 paginiOleodinamica Sulle Navi - AAVV, Assembled by LionsquidLeoTodaro100% (1)
- Dispensa PompeDocument14 paginiDispensa PompeAndreaÎncă nu există evaluări
- Esercizi IdraulicaDocument44 paginiEsercizi IdraulicaMichele Corvino100% (1)
- Esercizi Di TermodinamicaDocument25 paginiEsercizi Di TermodinamicadodecarioÎncă nu există evaluări
- Azionamenti Dei Sistemi MeccaniciDocument127 paginiAzionamenti Dei Sistemi MeccaniciMassimo Moroni50% (2)
- Texaedu s8c ItDocument8 paginiTexaedu s8c Itsalvatore castagninoÎncă nu există evaluări
- Verifica Fiaba BESDocument2 paginiVerifica Fiaba BESkiokko86Încă nu există evaluări
- GeostruFormula ITDocument85 paginiGeostruFormula ITMohammad SwalehÎncă nu există evaluări
- PACIG - Benvenuti 1-02strumenDocument8 paginiPACIG - Benvenuti 1-02strumenLenka CharvátováÎncă nu există evaluări
- PACIG - Benvenuti 2Document107 paginiPACIG - Benvenuti 2Lenka CharvátováÎncă nu există evaluări
- 116-543 2Document428 pagini116-543 2Enza SantoroÎncă nu există evaluări
- 5 Dinamica Verticale 12Document20 pagini5 Dinamica Verticale 12Domenico VerbicaroÎncă nu există evaluări
- Esercizio Dinamica Del Volo 6Document4 paginiEsercizio Dinamica Del Volo 6Domenico VerbicaroÎncă nu există evaluări
- Template Tesi SicurezzaDocument15 paginiTemplate Tesi SicurezzaDomenico VerbicaroÎncă nu există evaluări
- M AmDocument1 paginăM AmDomenico VerbicaroÎncă nu există evaluări
- CVDocument7 paginiCVDomenico VerbicaroÎncă nu există evaluări
- Seminar I o Digiorgio 2015Document72 paginiSeminar I o Digiorgio 2015Domenico VerbicaroÎncă nu există evaluări
- 2 La SpecificaDocument54 pagini2 La SpecificaDomenico VerbicaroÎncă nu există evaluări
- 4b4a Veicolo in Moto Rettilineo 09Document15 pagini4b4a Veicolo in Moto Rettilineo 09Domenico VerbicaroÎncă nu există evaluări
- Cuscinetti Volventi - FAG - Ing. Franco FontanaDocument103 paginiCuscinetti Volventi - FAG - Ing. Franco FontanaDomenico VerbicaroÎncă nu există evaluări
- 1c1manovellismo e Glifo 13Document16 pagini1c1manovellismo e Glifo 13Domenico VerbicaroÎncă nu există evaluări
- Quadrilatero ArticolatoDocument9 paginiQuadrilatero ArticolatoraffacapÎncă nu există evaluări
- Es7 PDFDocument5 paginiEs7 PDFDomenico VerbicaroÎncă nu există evaluări
- ParancoDocument5 paginiParancoraffacapÎncă nu există evaluări
- 2 - Punto Di ProgettoDocument127 pagini2 - Punto Di ProgettoDomenico VerbicaroÎncă nu există evaluări
- Miese 01Document2 paginiMiese 01Domenico VerbicaroÎncă nu există evaluări
- 1 - Il Processo Di DesignDocument38 pagini1 - Il Processo Di DesignDomenico VerbicaroÎncă nu există evaluări
- 1 PesiDocument42 pagini1 PesiDomenico VerbicaroÎncă nu există evaluări
- Combustione PDFDocument20 paginiCombustione PDFDomenico Verbicaro100% (1)
- Conduz PDFDocument19 paginiConduz PDFDomenico VerbicaroÎncă nu există evaluări
- MIese05 PDFDocument3 paginiMIese05 PDFDomenico VerbicaroÎncă nu există evaluări
- Classificazione Delle Macchine: DinamicheDocument0 paginiClassificazione Delle Macchine: DinamicheverbicarÎncă nu există evaluări
- Allegati Esercitazione AA2007-2008Document7 paginiAllegati Esercitazione AA2007-2008Domenico VerbicaroÎncă nu există evaluări
- C1ftd10 PDFDocument38 paginiC1ftd10 PDFFrancesco FerrettoÎncă nu există evaluări
- Distribuzioni PDFDocument15 paginiDistribuzioni PDFDomenico VerbicaroÎncă nu există evaluări
- Esercitazioni Di Centrali Turbogas e Cicli CombinatiDocument53 paginiEsercitazioni Di Centrali Turbogas e Cicli CombinatiChiara BisesÎncă nu există evaluări
- Esercitazioni Di Centrali IdroelettricheDocument97 paginiEsercitazioni Di Centrali IdroelettricheStefano AcciaioliÎncă nu există evaluări
- Cap.8 - Nuovi Sistemi Di Generazione PDFDocument25 paginiCap.8 - Nuovi Sistemi Di Generazione PDFDomenico VerbicaroÎncă nu există evaluări
- Cap.5 - Altri Impianti Termoelettrici PDFDocument20 paginiCap.5 - Altri Impianti Termoelettrici PDFDomenico VerbicaroÎncă nu există evaluări
- Turbine A Gas e Cicli CombinatiDocument92 paginiTurbine A Gas e Cicli CombinatiNiccolò Giannotti100% (2)
- Esercizi Generali Di Matematica Discreta PDFDocument3 paginiEsercizi Generali Di Matematica Discreta PDFmassimoÎncă nu există evaluări
- GeometriaDocument268 paginiGeometriaFilippoCampaCampagnaroÎncă nu există evaluări
- Algebra Lineare e Geometria II Basile-Stramaccia PDFDocument50 paginiAlgebra Lineare e Geometria II Basile-Stramaccia PDFRedon Karakaci0% (1)
- Lezione 3 (Analisi II)Document10 paginiLezione 3 (Analisi II)Alessandro BagnuoliÎncă nu există evaluări
- Esercizi Su Generatori, Vettori Linearmente Indipendenti, Basi e SottospaziDocument9 paginiEsercizi Su Generatori, Vettori Linearmente Indipendenti, Basi e SottospaziRosario GiocoÎncă nu există evaluări
- Appunti Matrici VettoriDocument36 paginiAppunti Matrici Vettorijoe zoroÎncă nu există evaluări
- Introduzione Ai TensoriDocument24 paginiIntroduzione Ai TensoriPietro Neri100% (1)
- Geometria DifferenzialeDocument345 paginiGeometria Differenzialemaschiet422550% (2)
- Lezione 1Document17 paginiLezione 1Gianluca ParadisoÎncă nu există evaluări
- Complemento OrtogonaleDocument7 paginiComplemento OrtogonaleBrian SheharaÎncă nu există evaluări
- Analisi Matematica IIDocument245 paginiAnalisi Matematica IILudwigÎncă nu există evaluări
- Somma DirettaDocument6 paginiSomma Direttaveronicasturniolo48Încă nu există evaluări
- Fondamenti Di Algebra Lineare E GeometriaDocument4 paginiFondamenti Di Algebra Lineare E GeometriaMarco MatteazziÎncă nu există evaluări
- Bignami AlgebraDocument17 paginiBignami AlgebraFrancesca De PariÎncă nu există evaluări
- Analisi Dei SegnaliDocument114 paginiAnalisi Dei SegnaliProject Symphony Collection100% (8)
- Algebra Line Are For DummiesDocument38 paginiAlgebra Line Are For DummiesAlessio BenedettiÎncă nu există evaluări
- Appunti Di Geometria Euclidea Nel Piano e Nello Spazio PDFDocument86 paginiAppunti Di Geometria Euclidea Nel Piano e Nello Spazio PDFmobÎncă nu există evaluări
- Simmetria PDFDocument42 paginiSimmetria PDFAlessandro Di VicoÎncă nu există evaluări