S-ar putea să vă placă și
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesDe la EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesÎncă nu există evaluări
- FR Rapport Obsolescence Equiterre Mai 2018Document32 paginiFR Rapport Obsolescence Equiterre Mai 2018Equiterre100% (1)
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013De la EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Încă nu există evaluări
- Asservissement en Attitude D'un DroneDocument10 paginiAsservissement en Attitude D'un DroneYolo BringÎncă nu există evaluări
- FreeCAD | Projets de conception CAO: Construire des modèles CAO avancés étape par étapeDe la EverandFreeCAD | Projets de conception CAO: Construire des modèles CAO avancés étape par étapeÎncă nu există evaluări
- Lettre de MotivationDocument2 paginiLettre de MotivationErrachidi MohamedÎncă nu există evaluări
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsDe la EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsÎncă nu există evaluări
- Conception Et Réalisation D Un Hélicoptère À Rotors Coaxiaux Contrarotatifs Pour Le Concours Micro Drones ONERA DGADocument81 paginiConception Et Réalisation D Un Hélicoptère À Rotors Coaxiaux Contrarotatifs Pour Le Concours Micro Drones ONERA DGAStephane Durel Mbida100% (1)
- Manuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013De la EverandManuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013Încă nu există evaluări
- Analyse FonctionnelleDocument51 paginiAnalyse FonctionnelleIsmail Sossey AlaouiÎncă nu există evaluări
- Extraction et Gestion des Connaissances: Actes de la conférence EGC'2019De la EverandExtraction et Gestion des Connaissances: Actes de la conférence EGC'2019Evaluare: 5 din 5 stele5/5 (1)
- Android HalDocument8 paginiAndroid HalImed YehyaouiÎncă nu există evaluări
- TD 26 Corrigé - PFS Résolution Analytique (Loi Entrée-Sortie Statique)Document12 paginiTD 26 Corrigé - PFS Résolution Analytique (Loi Entrée-Sortie Statique)Franklin DJERABEÎncă nu există evaluări
- Rapport Activite DefinitifDocument49 paginiRapport Activite DefinitifElodie RequetÎncă nu există evaluări
- Guide Analyse FonctionnelleDocument8 paginiGuide Analyse FonctionnellekadirikakaÎncă nu există evaluări
- CNC IntroductionDocument15 paginiCNC IntroductionIsmaïl Weld El HichriÎncă nu există evaluări
- Pratique Des Tests Logiciels - Jean-Francois Pradat-PeyreDocument360 paginiPratique Des Tests Logiciels - Jean-Francois Pradat-PeyrepfeÎncă nu există evaluări
- Simulation de MannequinDocument37 paginiSimulation de MannequinAyoubÎncă nu există evaluări
- Manuel Du Programme de PlaneurDocument468 paginiManuel Du Programme de Planeurpassioncadet100% (2)
- Ergonomie Des Tableaux de BordDocument26 paginiErgonomie Des Tableaux de BordAlain zouglouÎncă nu există evaluări
- 09 - La GMAODocument6 pagini09 - La GMAOMohamed Elamine Mansouri100% (1)
- Cours Analyse FonctionnelleDocument19 paginiCours Analyse FonctionnelleApollinaire Abega AbegaÎncă nu există evaluări
- Notice de Montage - Prusa I3 Rework3Document42 paginiNotice de Montage - Prusa I3 Rework3arduidevÎncă nu există evaluări
- Renault TwizyDocument44 paginiRenault Twizy92zap92Încă nu există evaluări
- RobInd Ch3p3 PDFDocument24 paginiRobInd Ch3p3 PDFSi Mohamed RahiliÎncă nu există evaluări
- Compte Rendu Conception Circuit NumeriqueDocument12 paginiCompte Rendu Conception Circuit NumeriquekachÎncă nu există evaluări
- ProjetDocument15 paginiProjetNada AGHZIELÎncă nu există evaluări
- Manuel de Reference PDFDocument470 paginiManuel de Reference PDFBalita Ambinintsoa Hariniaina Samoela100% (2)
- Cahier Des ChargesDocument3 paginiCahier Des ChargesAdel KaoubiÎncă nu există evaluări
- Lean - Manufacturing - 09 ChantiersDocument33 paginiLean - Manufacturing - 09 ChantiersParc ElyesÎncă nu există evaluări
- 10 Astuces Pour Gagner Du Temps Avec ExcelDocument5 pagini10 Astuces Pour Gagner Du Temps Avec Excelapi-230638887Încă nu există evaluări
- Mécanique Du Vélo CyclotourismeDocument90 paginiMécanique Du Vélo CyclotourismeYe MicromégasÎncă nu există evaluări
- Dossier Technique AR DroneDocument175 paginiDossier Technique AR DroneAnouar AleyaÎncă nu există evaluări
- Analyse de Cycle de Vie - Atelier LatereDocument3 paginiAnalyse de Cycle de Vie - Atelier LatereRafiq TahliÎncă nu există evaluări
- Ion Fonctionnelle D'un ProduitDocument17 paginiIon Fonctionnelle D'un ProduitMIMFS100% (1)
- TD AF Bouilloire Électrique PDFDocument3 paginiTD AF Bouilloire Électrique PDFayoub chabibÎncă nu există evaluări
- UmlDocument8 paginiUmlAbdelhamid HarakatÎncă nu există evaluări
- RapportDocument5 paginiRapportMohamed Ali Guirat0% (1)
- Rapport P6-3 2010 33 PDFDocument55 paginiRapport P6-3 2010 33 PDFYessineKammounÎncă nu există evaluări
- Dossier 3 SebDocument21 paginiDossier 3 SebasdelaneeÎncă nu există evaluări
- Rapport Du Mini-ProjetDocument23 paginiRapport Du Mini-ProjetMohammed Amine Smouh100% (1)
- Ibtisssam Mouka DDocument1 paginăIbtisssam Mouka DIBTISSAM MOUKAÎncă nu există evaluări
- Identifier Et Corriger Les Problèmes d'Impression 3D ・ CultsDocument20 paginiIdentifier Et Corriger Les Problèmes d'Impression 3D ・ Cultsjose luis Martínez ValcárcelÎncă nu există evaluări
- Ouachouache Abd El Krim PDFDocument90 paginiOuachouache Abd El Krim PDFGhazali SaidiÎncă nu există evaluări
- Actes 44 Congres Self 2009 ToulouseDocument644 paginiActes 44 Congres Self 2009 Toulousetabane faroukÎncă nu există evaluări
- FastDocument1 paginăFastAbdallah JaballahÎncă nu există evaluări
- T-SP-7 Diag Gantt 1Document12 paginiT-SP-7 Diag Gantt 1doubeÎncă nu există evaluări
- Acoustique Technique 48Document73 paginiAcoustique Technique 48totorino38100% (1)
- L'analyse Fonctionnelle Pour Les DébutantsDocument22 paginiL'analyse Fonctionnelle Pour Les DébutantsJb CheryÎncă nu există evaluări
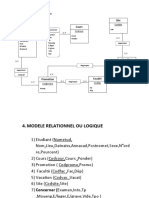
- Modèle Conceptuel de Données MCDDocument3 paginiModèle Conceptuel de Données MCDAristote EngudiÎncă nu există evaluări
- Le Compte RenduDocument4 paginiLe Compte RenduWalid MaamerÎncă nu există evaluări
- Prévenez Les Pannes Et Optimisez Votre Activité Grâce À Un Plan de MaintenanceDocument10 paginiPrévenez Les Pannes Et Optimisez Votre Activité Grâce À Un Plan de MaintenanceAhmed HasbellaouiÎncă nu există evaluări
- Quad CopterDocument14 paginiQuad CopteromarÎncă nu există evaluări
- Chapitre:Les Outils de DéveloppementDocument10 paginiChapitre:Les Outils de DéveloppementAmine ZeroualÎncă nu există evaluări
- Fiche Linuxmint RouteurDocument5 paginiFiche Linuxmint Routeurapi-306520273Încă nu există evaluări
- 10 GPA445 E13 Maquette NumériqueDocument66 pagini10 GPA445 E13 Maquette Numériqueahmedfarahidi100% (1)
- Résumé de MATLAB OnrampDocument3 paginiRésumé de MATLAB OnrampMustapha Ait sidi ben lahcen lamraniÎncă nu există evaluări
- Le SmedDocument11 paginiLe SmedDon LarabÎncă nu există evaluări
- Un Club D'échecs, Comment Ça MarcheDocument8 paginiUn Club D'échecs, Comment Ça Marcheetiene32Încă nu există evaluări
- Ouarrak Youness WordDocument15 paginiOuarrak Youness WordYounes LaananiÎncă nu există evaluări
- Un Suiveur de Ligne (Encore Avec Arduino) - Brico BidulesDocument9 paginiUn Suiveur de Ligne (Encore Avec Arduino) - Brico Bidulesmechernene_aek9037Încă nu există evaluări
- Un Suiveur de Ligne (Encore Avec Arduino) - Brico BidulesDocument9 paginiUn Suiveur de Ligne (Encore Avec Arduino) - Brico Bidulesmechernene_aek9037Încă nu există evaluări
- Shingo FR PDFDocument7 paginiShingo FR PDFmechernene_aek9037Încă nu există evaluări
- TP Sur MatlabDocument7 paginiTP Sur Matlabmechernene_aek9037Încă nu există evaluări
- ArduinoDocument39 paginiArduinomechernene_aek9037Încă nu există evaluări
- Le Corps Noir Est Un Modèle Couramment Utilisé en Physique Quantique Pour Décrire Les Propriétés Du Rayonnement Thermique DDocument2 paginiLe Corps Noir Est Un Modèle Couramment Utilisé en Physique Quantique Pour Décrire Les Propriétés Du Rayonnement Thermique Dmechernene_aek9037Încă nu există evaluări
- Guide IsisDocument22 paginiGuide Isismechernene_aek9037100% (1)
- DC Motor )Document1 paginăDC Motor )mechernene_aek9037Încă nu există evaluări
- Algèbre de Boole Et Circuits Logiques Cour2Document6 paginiAlgèbre de Boole Et Circuits Logiques Cour2mechernene_aek9037Încă nu există evaluări
- TD Asservissement m1 Spi-GmaDocument48 paginiTD Asservissement m1 Spi-Gmamechernene_aek90370% (1)
- TIE TP Redcom Pont Mixte 2004 PDFDocument1 paginăTIE TP Redcom Pont Mixte 2004 PDFmechernene_aek9037Încă nu există evaluări
- Cours Oscillo Tektronix - Terret Dominique - Medecine PDFDocument8 paginiCours Oscillo Tektronix - Terret Dominique - Medecine PDFmechernene_aek9037Încă nu există evaluări
- 02partie1 PDFDocument31 pagini02partie1 PDFmechernene_aek9037Încă nu există evaluări
- M OscillateurDocument35 paginiM OscillateurYou NessÎncă nu există evaluări
- AEMC-Taille Des Convertisseurs PDFDocument26 paginiAEMC-Taille Des Convertisseurs PDFmechernene_aek9037Încă nu există evaluări
- Cem2 PDFDocument93 paginiCem2 PDFmechernene_aek9037Încă nu există evaluări
- AlimentationsFerrieux PDFDocument57 paginiAlimentationsFerrieux PDFmechernene_aek9037Încă nu există evaluări
- FCosta Diaporama JEEA07Document21 paginiFCosta Diaporama JEEA07mechernene_aek9037Încă nu există evaluări
- Chap3 Parasites PDFDocument27 paginiChap3 Parasites PDFmechernene_aek9037Încă nu există evaluări
- Rige 2006 PDFDocument30 paginiRige 2006 PDFmechernene_aek9037Încă nu există evaluări
- Tutorial LatexDocument33 paginiTutorial LatexRabeb BAÎncă nu există evaluări
- Enonce Psim PDFDocument9 paginiEnonce Psim PDFmechernene_aek9037Încă nu există evaluări
- Modèle LaTeX Pour Le Mémoire de ThèseDocument38 paginiModèle LaTeX Pour Le Mémoire de Thèsemechernene_aek9037Încă nu există evaluări
- Didac1 PSIM PDFDocument6 paginiDidac1 PSIM PDFmechernene_aek9037Încă nu există evaluări
- Page de Garde LatexDocument3 paginiPage de Garde Latexmechernene_aek9037Încă nu există evaluări
- Capitan e AnuDocument225 paginiCapitan e AnuYahia NinoÎncă nu există evaluări
- Latex 20Document109 paginiLatex 20GOKPIÎncă nu există evaluări
- Maths PDFDocument31 paginiMaths PDFmechernene_aek9037Încă nu există evaluări
- TP Vitesse DR300v2bDocument5 paginiTP Vitesse DR300v2bmechernene_aek9037Încă nu există evaluări
- Devoirmcc HacDocument4 paginiDevoirmcc HacAsm MaÎncă nu există evaluări
- FR Technical Guide No 1 REVC PDFDocument36 paginiFR Technical Guide No 1 REVC PDFDerrouch AbderrahmaneÎncă nu există evaluări
- Exercice Travail Et Puissance D'une Force-3Document1 paginăExercice Travail Et Puissance D'une Force-3loubnamouad2006Încă nu există evaluări
- Exercice 1 Sur Les MCCDocument12 paginiExercice 1 Sur Les MCCBOUREIMA ZOGONA100% (1)
- MCC Et TDDocument18 paginiMCC Et TDDame GayeÎncă nu există evaluări
- Travail Et Puissance D Une Force Cours 1 4Document5 paginiTravail Et Puissance D Une Force Cours 1 4kokakolaÎncă nu există evaluări
- 3 A080 D 01Document7 pagini3 A080 D 01SegaAlainCoulibalyÎncă nu există evaluări
- Article 2012 - RECHERCHE DES PARAMÈTRES OPTIMAUX D 'UNE MACHINE SYNCHRONE A AIMANTS PERMANENTSDocument29 paginiArticle 2012 - RECHERCHE DES PARAMÈTRES OPTIMAUX D 'UNE MACHINE SYNCHRONE A AIMANTS PERMANENTSsifo mohÎncă nu există evaluări
- Travail Et PuissanceDocument8 paginiTravail Et PuissancePapa DiagneÎncă nu există evaluări
- Séance 3Document2 paginiSéance 3Joseph ChemalyÎncă nu există evaluări
- Shafer RV Series (1) FRDocument8 paginiShafer RV Series (1) FRYassine YassineÎncă nu există evaluări
- Duguet, Charles (Capitaine) - Physique Qualitative, Où L'on Répond À La Question Qu'est-Ce Que L'électricité Et À D'autres, Par Charles Duguet,.... 1889.Document489 paginiDuguet, Charles (Capitaine) - Physique Qualitative, Où L'on Répond À La Question Qu'est-Ce Que L'électricité Et À D'autres, Par Charles Duguet,.... 1889.cdm22orangeÎncă nu există evaluări
- P 7097 We FR A4 PDFDocument92 paginiP 7097 We FR A4 PDFGlenn Dioses LeandroÎncă nu există evaluări
- TD 01 2018Document7 paginiTD 01 2018Imad RahmounÎncă nu există evaluări
- Dynamique Chaîne D ÉnergieDocument10 paginiDynamique Chaîne D ÉnergieenguerrandvaubyÎncă nu există evaluări
- TD Moteur-Courant-ContDocument2 paginiTD Moteur-Courant-Conthoussin unusÎncă nu există evaluări
- Baccalaureat 2004 PDFDocument40 paginiBaccalaureat 2004 PDFJulien AttackÎncă nu există evaluări
- Moteurs Pas À PasDocument21 paginiMoteurs Pas À PasLyes100% (1)
- Statique Du SolideDocument55 paginiStatique Du SolideZiko100% (1)
- Hydraulique Industrielle - CoursDocument103 paginiHydraulique Industrielle - CoursAbo Kolou100% (2)
- Puissance Moteur PDFDocument9 paginiPuissance Moteur PDFSelt RachidÎncă nu există evaluări
- Turbo 2 ADocument87 paginiTurbo 2 ADjouabi AbderrazakÎncă nu există evaluări
- Statique Exercices 2023Document76 paginiStatique Exercices 2023Egide Ilunga Mpiana100% (5)
- PTSI Meca SolideDocument4 paginiPTSI Meca Solidebouhrara faroukÎncă nu există evaluări
- Cours D'électrotechDocument436 paginiCours D'électrotechsisilafamille100% (1)
- Mines Ponts MP 2009 Si EpreuveDocument35 paginiMines Ponts MP 2009 Si EpreuveIlyas MhammediÎncă nu există evaluări
- Induction Electromagnetique-Chapitre 2-Actions Du Champ MagnetiqueDocument34 paginiInduction Electromagnetique-Chapitre 2-Actions Du Champ MagnetiqueOsée Magloire100% (1)
- CH II - 5eme Partie - Cours de Statique P.pdf.eDocument9 paginiCH II - 5eme Partie - Cours de Statique P.pdf.eMeroua LounaoussiÎncă nu există evaluări
- Cours Les Eoliennes Partie5Document18 paginiCours Les Eoliennes Partie5AKHRIFÎncă nu există evaluări
- Formation Applicatif New Mi 2007 2010 Maintenance Niveau 3 V1.5Document57 paginiFormation Applicatif New Mi 2007 2010 Maintenance Niveau 3 V1.5zganonÎncă nu există evaluări