S-ar putea să vă placă și
- CAT Programming ManualDocument258 paginiCAT Programming ManualDuy Kha95% (108)
- Fuel D13Document12 paginiFuel D13Eduardo Pai Tocarlo90% (40)
- Solid State DC Drives Part1 PDFDocument72 paginiSolid State DC Drives Part1 PDFGopi Krishnan100% (2)
- Study of a reluctance magnetic gearbox for energy storage system applicationDe la EverandStudy of a reluctance magnetic gearbox for energy storage system applicationEvaluare: 1 din 5 stele1/5 (1)
- Speeduino Manual PDFDocument58 paginiSpeeduino Manual PDFgiapy0000Încă nu există evaluări
- Complete System Administrator ChecklistDocument8 paginiComplete System Administrator ChecklistPietHelmÎncă nu există evaluări
- Graduation Project: Supervisor: Dr. Samer MayalehDocument48 paginiGraduation Project: Supervisor: Dr. Samer MayalehTien Pham vanÎncă nu există evaluări
- 19 Speed PDFDocument8 pagini19 Speed PDFNur Muhammad DzikriÎncă nu există evaluări
- Speed Control of DC Motor by Using PWM TechniqueDocument51 paginiSpeed Control of DC Motor by Using PWM TechniqueYuvraj GogoiÎncă nu există evaluări
- Final ReportDocument59 paginiFinal ReportAzeez SharieffÎncă nu există evaluări
- Technology Template 16x9Document22 paginiTechnology Template 16x9Dare DevilÎncă nu există evaluări
- Ba-Thunya Ali, DKK, (2001) Single Phase Induction Motor Drives - A Literature SurveyDocument6 paginiBa-Thunya Ali, DKK, (2001) Single Phase Induction Motor Drives - A Literature SurveyBustanul ArifienÎncă nu există evaluări
- Closed Loop Speed Control of 3-Phase Induction MotorDocument27 paginiClosed Loop Speed Control of 3-Phase Induction MotorRajesh kumar yadavÎncă nu există evaluări
- L T D I V F D: Atest Echnological Evelopments N Ariable Requency RivesDocument18 paginiL T D I V F D: Atest Echnological Evelopments N Ariable Requency RivesBijay AgrawalÎncă nu există evaluări
- Speed Control of Single Phase InductionDocument6 paginiSpeed Control of Single Phase InductionMuhammad MuneebÎncă nu există evaluări
- Infant Monitoring System Using Co2 Sensor-Project ReportDocument59 paginiInfant Monitoring System Using Co2 Sensor-Project ReportRajesh Kumar0% (1)
- Speed Control of DC MotorDocument18 paginiSpeed Control of DC Motorkrishnareddy_chintalaÎncă nu există evaluări
- Different Methods of Speed Control of Three-Phase PDFDocument7 paginiDifferent Methods of Speed Control of Three-Phase PDFRicardo BerizzoÎncă nu există evaluări
- ReportfinalDocument44 paginiReportfinalYuvraj GogoiÎncă nu există evaluări
- Speed ControlDocument4 paginiSpeed ControlNguyễn LiêmÎncă nu există evaluări
- Electric DrivesDocument35 paginiElectric Drivesbabli.panchal1984Încă nu există evaluări
- Module-4 Notes - Induction MachinesDocument25 paginiModule-4 Notes - Induction Machineschandu 77Încă nu există evaluări
- Electric Drives ControlDocument29 paginiElectric Drives ControlNebyou DanielÎncă nu există evaluări
- Electrical Ac & DC Drives: S.Sumalatha G.Lakshmi PrasannaDocument20 paginiElectrical Ac & DC Drives: S.Sumalatha G.Lakshmi PrasannageniunetÎncă nu există evaluări
- How To Drive DC Motors With Smart Power IcsDocument14 paginiHow To Drive DC Motors With Smart Power IcsGoran ŽivkovićÎncă nu există evaluări
- Chapter-1: Vissj Govt Polytechnic BhadravathiDocument22 paginiChapter-1: Vissj Govt Polytechnic Bhadravathipacha_569800Încă nu există evaluări
- Speed Control of DC MotorDocument19 paginiSpeed Control of DC MotorVijaya LakshmiÎncă nu există evaluări
- Unit Iii Induction Motor Drives: Dept. of EEEDocument17 paginiUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarÎncă nu există evaluări
- Modern VVVF DrivesDocument5 paginiModern VVVF DrivesJohn BackmanÎncă nu există evaluări
- Solid State Drives & StartersDocument18 paginiSolid State Drives & StartersFlo MircaÎncă nu există evaluări
- A.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryDocument5 paginiA.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryCønstäh Van Der WüppertälärîanskíhÎncă nu există evaluări
- SINGLE-PHASE INDUCTION MOTORS (Electric Motor) PDFDocument13 paginiSINGLE-PHASE INDUCTION MOTORS (Electric Motor) PDFMomanddad la Lng100% (2)
- The Voltech Handbook of PWM Motor DrivesDocument53 paginiThe Voltech Handbook of PWM Motor DrivesPovaS100% (1)
- v42 63Document5 paginiv42 63Bala KumarÎncă nu există evaluări
- Types of MotorsDocument12 paginiTypes of MotorsMatin Inamdar100% (1)
- 2365 02 l2 202 Handout 25Document2 pagini2365 02 l2 202 Handout 25dvm4yfptzmÎncă nu există evaluări
- Ain Shams University Faculty of Engineering Chep Energy SeniorDocument12 paginiAin Shams University Faculty of Engineering Chep Energy Seniorbanana_26Încă nu există evaluări
- Chapter 3.10: Energy Efficient Technologies in Electrical SystemsDocument8 paginiChapter 3.10: Energy Efficient Technologies in Electrical SystemsdineshvhavalÎncă nu există evaluări
- Different Methods of Speed Control of Three-Phase Asynchronous MotorDocument8 paginiDifferent Methods of Speed Control of Three-Phase Asynchronous MotorJeromeÎncă nu există evaluări
- DC DrivesDocument20 paginiDC Drivesvinay345Încă nu există evaluări
- AC Drive Theory and Application: Benefits of Using AC DrivesDocument8 paginiAC Drive Theory and Application: Benefits of Using AC DrivesRaghu KodiÎncă nu există evaluări
- VFD BasicsDocument9 paginiVFD BasicsDinesh KumaraÎncă nu există evaluări
- Lecture 6Document31 paginiLecture 6amanuel abrehaÎncă nu există evaluări
- Cahier Technique No. 208: Electronic Starters and Variable Speed DrivesDocument30 paginiCahier Technique No. 208: Electronic Starters and Variable Speed DrivesQuique GodoyÎncă nu există evaluări
- Mini Project DC MotorDocument20 paginiMini Project DC MotorDeepanshu patelÎncă nu există evaluări
- Relay and Timer Based Automatic Star-Delta StarterDocument3 paginiRelay and Timer Based Automatic Star-Delta StarterInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Application Considerations For PWM Inverter-Fed Low-Voltage Induction MotorsDocument8 paginiApplication Considerations For PWM Inverter-Fed Low-Voltage Induction Motorssathish2103Încă nu există evaluări
- Topic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyDocument13 paginiTopic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyMAr Lon Dela CruzÎncă nu există evaluări
- CSPDocument8 paginiCSPmeghraj01100% (1)
- SSRN Id3917884Document9 paginiSSRN Id3917884Asha PatilÎncă nu există evaluări
- Technical Seminar On VFDDocument17 paginiTechnical Seminar On VFDRadhika Priyadarshini100% (7)
- BDocument46 paginiBemmanueel2Încă nu există evaluări
- Variable Frequency Drives Purchasing TipsDocument7 paginiVariable Frequency Drives Purchasing TipsMaintenance CircleÎncă nu există evaluări
- Energy Saving in Induction MotorsDocument11 paginiEnergy Saving in Induction MotorsS Bharadwaj ReddyÎncă nu există evaluări
- Three Phase Induction Motor Using Single PhaseDocument8 paginiThree Phase Induction Motor Using Single PhasehezugÎncă nu există evaluări
- Electrical Science-2: Term Paper of Ele102Document7 paginiElectrical Science-2: Term Paper of Ele102shailesh singhÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Power Electronics: Lecture Notes of Power Electronics CourseDe la EverandPower Electronics: Lecture Notes of Power Electronics CourseÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
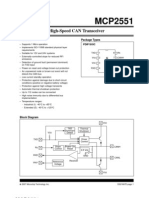
- MCP 2551Document24 paginiMCP 2551senguttuvelÎncă nu există evaluări
- VOLVO 7748542 US Installation EMS 2 D13 PDFDocument62 paginiVOLVO 7748542 US Installation EMS 2 D13 PDFSIVARAMANJAGANATHANÎncă nu există evaluări
- Bosch System Basis Chip Cy329 Product SummaryDocument6 paginiBosch System Basis Chip Cy329 Product SummaryPijai TDMÎncă nu există evaluări
- CANFD_ProjectDocument4 paginiCANFD_Projectgiapy0000Încă nu există evaluări
- Pinout Denso Hyundai Megatruck2010Document1 paginăPinout Denso Hyundai Megatruck2010giapy0000Încă nu există evaluări
- PLC Overview 4104euen0802Document40 paginiPLC Overview 4104euen0802Jeevan JyotiÎncă nu există evaluări
- 25 MR-100 Hyd-DiagDocument1 pagină25 MR-100 Hyd-Diaggiapy0000Încă nu există evaluări
- L Series: Engineered To SaveDocument8 paginiL Series: Engineered To Savegiapy0000Încă nu există evaluări
- Electric Diagram For SR-250 Upper1Document1 paginăElectric Diagram For SR-250 Upper1giapy0000Încă nu există evaluări
- 6068hf 485 Manual-EngineDocument160 pagini6068hf 485 Manual-Enginegiapy0000Încă nu există evaluări
- Speeduino Manual PDFDocument58 paginiSpeeduino Manual PDFgiapy0000Încă nu există evaluări
- Ic 900 PDFDocument100 paginiIc 900 PDFShubra DebÎncă nu există evaluări
- User'S Manual: PIC-P26J50 Proto Development BoardDocument19 paginiUser'S Manual: PIC-P26J50 Proto Development Boardgiapy0000100% (1)
- Pic 14000Document153 paginiPic 14000MarkoStankovicÎncă nu există evaluări
- Manualegcp2 26174 BDocument234 paginiManualegcp2 26174 BINGRgomezÎncă nu există evaluări
- Manual de Partes Del Motor Cat c9Document127 paginiManual de Partes Del Motor Cat c9jalb80% (5)
- Manual Pic 18F2550Document430 paginiManual Pic 18F2550Pancho NuncioÎncă nu există evaluări
- Preamp PDFDocument1 paginăPreamp PDFgiapy0000Încă nu există evaluări
- Product Manual 04176 (Revision G, 8/2015) : Proact™ Ii Electric Powered Actuator and DriverDocument33 paginiProduct Manual 04176 (Revision G, 8/2015) : Proact™ Ii Electric Powered Actuator and DriverpayÎncă nu există evaluări
- Gold Capacitors: Electric Double Layer CapacitorsDocument28 paginiGold Capacitors: Electric Double Layer Capacitorsgiapy0000Încă nu există evaluări
- 275kw Diesel Generator Datasheet J275u (English)Document4 pagini275kw Diesel Generator Datasheet J275u (English)giapy0000Încă nu există evaluări
- Release Sd2 EngDocument12 paginiRelease Sd2 Enggiapy0000Încă nu există evaluări
- m0698 - Power Mode Bypass Controller To Suit Komatsu Hd785-5 and Hd785-7 VehiclesDocument16 paginim0698 - Power Mode Bypass Controller To Suit Komatsu Hd785-5 and Hd785-7 Vehiclesgiapy0000Încă nu există evaluări
- R"i 1 - F'y" Uo: LB II IftDocument2 paginiR"i 1 - F'y" Uo: LB II Iftgiapy0000Încă nu există evaluări
- Koler Power Systems 20 - 2000kW - Operation - Manual PDFDocument80 paginiKoler Power Systems 20 - 2000kW - Operation - Manual PDFTấn Dũng BùiÎncă nu există evaluări
- CN Lab Project PresentationDocument23 paginiCN Lab Project PresentationShahneel ShaykhÎncă nu există evaluări
- 2 Data Literacy Essentials of Azure Data FactoryDocument4 pagini2 Data Literacy Essentials of Azure Data FactoryYue ZhaoÎncă nu există evaluări
- Een 300 2022-23Document11 paginiEen 300 2022-23Vivek SharmaÎncă nu există evaluări
- Creative SB Live Platinum Ct4760 Sound Card PCI 15l PDFDocument4 paginiCreative SB Live Platinum Ct4760 Sound Card PCI 15l PDFAlfredÎncă nu există evaluări
- Firmware MatrixDocument15 paginiFirmware Matrixsts100Încă nu există evaluări
- Multifunction Meter (Mfm-02) : FeaturesDocument1 paginăMultifunction Meter (Mfm-02) : FeaturesBhageerathi SahuÎncă nu există evaluări
- Bogen MT60A & MT125B Booster AmplifiersDocument6 paginiBogen MT60A & MT125B Booster AmplifiersNeal BarrettÎncă nu există evaluări
- Speaker - Headset - Earphone Memory Ram Processor MonitorDocument1 paginăSpeaker - Headset - Earphone Memory Ram Processor MonitorfaniwardhanaÎncă nu există evaluări
- Computer Science Worksheet 01 DHR - LISDocument27 paginiComputer Science Worksheet 01 DHR - LISAthaya MuneefÎncă nu există evaluări
- Helsinki Finnish Linus Torvalds Linux KernelDocument6 paginiHelsinki Finnish Linus Torvalds Linux KernelArnav PrasadÎncă nu există evaluări
- 2.0+ Exp .Net - Harsha ResumeDocument4 pagini2.0+ Exp .Net - Harsha ResumeSriharshareddy JonnalaÎncă nu există evaluări
- Ins 24 DVR 02Document78 paginiIns 24 DVR 02Pupung FlashÎncă nu există evaluări
- VSAT Troubleshoot GuideDocument12 paginiVSAT Troubleshoot Guidemehdi moghimiÎncă nu există evaluări
- Intellegent Cache SystemDocument18 paginiIntellegent Cache Systemapi-3746880Încă nu există evaluări
- VRX918S: 18" High Power Flying SubwooferDocument2 paginiVRX918S: 18" High Power Flying SubwooferNarayan Kumar GoaÎncă nu există evaluări
- GUI - Bloopers 7 ResponsivenessDocument79 paginiGUI - Bloopers 7 ResponsivenessMadeehah AatifÎncă nu există evaluări
- Cours 1 CISCO - Configuration Et Gestion Des SwitchDocument61 paginiCours 1 CISCO - Configuration Et Gestion Des SwitchYounes BoucherifÎncă nu există evaluări
- System Bus NocDocument102 paginiSystem Bus NocShubham DusadÎncă nu există evaluări
- Networx Series: Nx-216E Zone Expander Module Installation and StartupDocument16 paginiNetworx Series: Nx-216E Zone Expander Module Installation and StartupEdison Macleiry Tejeda NúñezÎncă nu există evaluări
- Zendframework 3 SampleDocument24 paginiZendframework 3 SampleAntonÎncă nu există evaluări
- 8251 - UsartDocument24 pagini8251 - UsartAvanish NiranjanÎncă nu există evaluări
- Yamaha AX 596 Service ManualDocument26 paginiYamaha AX 596 Service Manualraymundo dominguezÎncă nu există evaluări
- Hw2 SolutionDocument8 paginiHw2 SolutionTun LeÎncă nu există evaluări
- Microsoft Dynamics CRM: by Akshata Raut - 77 Urvashi Roy - 78Document13 paginiMicrosoft Dynamics CRM: by Akshata Raut - 77 Urvashi Roy - 78Urvashi RoyÎncă nu există evaluări
- Arba Minch University Arba Minch Institute of Technology Department of Electrical and Computer Engineering TitleDocument43 paginiArba Minch University Arba Minch Institute of Technology Department of Electrical and Computer Engineering TitleDawit LelisaÎncă nu există evaluări
- Cs 252 Java Basics 12Document70 paginiCs 252 Java Basics 12Ojas DhoneÎncă nu există evaluări
- zITYS MSDocument24 paginizITYS MSAnuradhe ThilakarathnaÎncă nu există evaluări
- Mobile WalkthroughDocument26 paginiMobile WalkthroughRainanda MarselÎncă nu există evaluări
- Clockless ChipDocument20 paginiClockless Chipsumesh5350% (4)