S-ar putea să vă placă și
- Tem 3413354 0101Document67 paginiTem 3413354 0101Kolawole KehindeÎncă nu există evaluări
- Schlaich Truss Models PCI 1987Document39 paginiSchlaich Truss Models PCI 1987mcunh4Încă nu există evaluări
- CE201 Reinforced & Prestressed Concrete Structures (2010)Document88 paginiCE201 Reinforced & Prestressed Concrete Structures (2010)asdasÎncă nu există evaluări
- Concrete Technology, NEVILLE 2nd Edition Book PDFDocument460 paginiConcrete Technology, NEVILLE 2nd Edition Book PDFramya_an241183% (12)
- EBS Data MaskingDocument31 paginiEBS Data MaskingNawab ShariefÎncă nu există evaluări
- Ultrasonic Atomizing Nozzle SystemsDocument40 paginiUltrasonic Atomizing Nozzle SystemsAnonymous H8hysGxA100% (1)
- Dokumen - Tips - Design With Strut and Tie ModelDocument40 paginiDokumen - Tips - Design With Strut and Tie ModelOlivia OeyÎncă nu există evaluări
- Design of Deep BeamsDocument5 paginiDesign of Deep BeamsNitish Ramdawor50% (2)
- Yield Line Analysis For SlabsDocument9 paginiYield Line Analysis For Slabshghjjjk100% (1)
- Prestressed Concrete Analysis and Design Fundamentals 2nd Ed CAP 15Document56 paginiPrestressed Concrete Analysis and Design Fundamentals 2nd Ed CAP 15Carlos Alberto Pacheco SierraÎncă nu există evaluări
- SP 273 15Document18 paginiSP 273 15Žarko LazićÎncă nu există evaluări
- Cracks As Important Constituents of Strut and Tie ModelsDocument20 paginiCracks As Important Constituents of Strut and Tie ModelsBrandon LevineÎncă nu există evaluări
- Figure 1 Example of D-Regions in A Common Building StructureDocument13 paginiFigure 1 Example of D-Regions in A Common Building StructureCristobal Jimenez MuchoÎncă nu există evaluări
- Strut-And-Tie Model Design Provisions: Robin G. Tuchscherer, David B. Birrcher, and Oguzhan BayrakDocument16 paginiStrut-And-Tie Model Design Provisions: Robin G. Tuchscherer, David B. Birrcher, and Oguzhan BayrakDavid Apaza QuispeÎncă nu există evaluări
- SevenDocument13 paginiSevenjackhill9Încă nu există evaluări
- Yield Line Analysis For Slabs Module12 Lesson30Document29 paginiYield Line Analysis For Slabs Module12 Lesson30Ajit Singh Rathore100% (2)
- Ultimate Resistance of Reinforced Concrete Columns Strengthened With Angles and Battens: Theoretical Model and Experimental ValidationDocument15 paginiUltimate Resistance of Reinforced Concrete Columns Strengthened With Angles and Battens: Theoretical Model and Experimental ValidationUcok DedyÎncă nu există evaluări
- Chapter 3-Strut-and-Tie ModelDocument91 paginiChapter 3-Strut-and-Tie ModelAntenehÎncă nu există evaluări
- Strut and Tie LectureDocument9 paginiStrut and Tie LectureNAUTILUS87Încă nu există evaluări
- Stiffened Plates PDFDocument16 paginiStiffened Plates PDFfarhadmrt6923Încă nu există evaluări
- Static Resistance Bolted Circular Flange JointsDocument9 paginiStatic Resistance Bolted Circular Flange JointsBálint Vaszilievits-SömjénÎncă nu există evaluări
- 2.3 Folded, Plates With Diaphragms Restraining Free Cross-Sectional WarpingDocument37 pagini2.3 Folded, Plates With Diaphragms Restraining Free Cross-Sectional WarpingKenji ChouÎncă nu există evaluări
- Iabse20142014 01 22Document9 paginiIabse20142014 01 22Giovanni FaiazzaÎncă nu există evaluări
- Chapter Six, Deep Beams and CorbelsDocument8 paginiChapter Six, Deep Beams and CorbelsHaftom Gebreegziabiher50% (2)
- Lecturenote - 1714126640chapter Six, Deep Beams and CorbelsDocument8 paginiLecturenote - 1714126640chapter Six, Deep Beams and CorbelsTmiky GateÎncă nu există evaluări
- UB As ColumnsDocument16 paginiUB As ColumnssuvraÎncă nu există evaluări
- Beam Column Base Plate DesignDocument10 paginiBeam Column Base Plate DesignFar HanÎncă nu există evaluări
- BEAMS IN REINFORCED CONCRETE - CourseEC2-Chap4Document84 paginiBEAMS IN REINFORCED CONCRETE - CourseEC2-Chap4petermacÎncă nu există evaluări
- Time Saving-Two Way2Document9 paginiTime Saving-Two Way2Wanda Beasley100% (1)
- Softened Truss Model For RC Torsional Members Under Combined ActionDocument8 paginiSoftened Truss Model For RC Torsional Members Under Combined ActionMinaksheePhutkeÎncă nu există evaluări
- Cib8138 PDFDocument6 paginiCib8138 PDFChee Fong MakeÎncă nu există evaluări
- Applmech 01 00006 v4Document18 paginiApplmech 01 00006 v4Bara'ah AlnemrawiÎncă nu există evaluări
- Lecture 10.6.3: Shear Connection III: PreviousDocument9 paginiLecture 10.6.3: Shear Connection III: PreviousRahul ShrivastavaÎncă nu există evaluări
- Beam-To-Beam Joints With Bolted End-Plate Connections Concerning Steel Platforms Angra 2 NPPDocument10 paginiBeam-To-Beam Joints With Bolted End-Plate Connections Concerning Steel Platforms Angra 2 NPPihpeterÎncă nu există evaluări
- Toniolo-DiPrisco2017 Chapter CentredAxialForceDocument85 paginiToniolo-DiPrisco2017 Chapter CentredAxialForceÉnio Elias Gonçalves NtambalicaÎncă nu există evaluări
- Nodal Regions) - A Selection of Strut-And-Tie Models For A Few Typical 2-D D-Regions Is IllustratedDocument9 paginiNodal Regions) - A Selection of Strut-And-Tie Models For A Few Typical 2-D D-Regions Is IllustratedPrasanth NairÎncă nu există evaluări
- Explanation of One Way and Two Way Slab ActionDocument17 paginiExplanation of One Way and Two Way Slab Actionxckwzr100% (4)
- One Way SlabsDocument16 paginiOne Way Slabsbemd_ali6990Încă nu există evaluări
- Effect of Beam Dimensions On Structural Performance of Wide Beam-Column JointsDocument7 paginiEffect of Beam Dimensions On Structural Performance of Wide Beam-Column JointsRafa SouzaÎncă nu există evaluări
- FJP 22 10 1Document6 paginiFJP 22 10 1edicson1aÎncă nu există evaluări
- 5 Flexible Saddle Support of A Horizontal Cylindrical Pressure Vessel by MagnuckiDocument6 pagini5 Flexible Saddle Support of A Horizontal Cylindrical Pressure Vessel by MagnuckiAntonio Perez ZornozaÎncă nu există evaluări
- Bridge DesignDocument21 paginiBridge DesignattartouseefahemedÎncă nu există evaluări
- Structure Base JCSRDocument46 paginiStructure Base JCSRivan bolañosÎncă nu există evaluări
- ACI 533-5R-20 Guide For Precast Concrete Tunnel Segmentes Parte 2-2Document47 paginiACI 533-5R-20 Guide For Precast Concrete Tunnel Segmentes Parte 2-2Mapeix100% (1)
- 3D Finite Element Stress Analysis of Reinforced DoDocument11 pagini3D Finite Element Stress Analysis of Reinforced DoScribd01mai2019Încă nu există evaluări
- Hillerborg Strip MethodDocument28 paginiHillerborg Strip MethodKreen13271% (7)
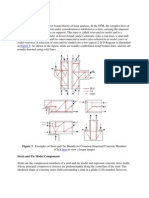
- Stress Analysis On Bulkhead Model For BWB Heavy Lifter Passenger AircraftDocument6 paginiStress Analysis On Bulkhead Model For BWB Heavy Lifter Passenger AircrafttheijesÎncă nu există evaluări
- Design of Shear Reinforcement For Timber BeamsDocument16 paginiDesign of Shear Reinforcement For Timber BeamsUlrich HübnerÎncă nu există evaluări
- Design of Rigid Pile Caps Through An Iterative Strut-And-Tie ModelDocument12 paginiDesign of Rigid Pile Caps Through An Iterative Strut-And-Tie ModeljjohnsoneÎncă nu există evaluări
- Beam Design in PR Braced Steel FramesDocument13 paginiBeam Design in PR Braced Steel FramesgullipalliÎncă nu există evaluări
- Seismic Behaviour of RC Exterior Wide Beam-Column Joints: S.H. Luk and J.S. KuangDocument10 paginiSeismic Behaviour of RC Exterior Wide Beam-Column Joints: S.H. Luk and J.S. KuangkyleÎncă nu există evaluări
- Effective Design Tension Resistance of BDocument8 paginiEffective Design Tension Resistance of BPaulo_1970Încă nu există evaluări
- Beam-Column Base Plate Design-LRFD Method PDFDocument10 paginiBeam-Column Base Plate Design-LRFD Method PDFRommel Hidalgo DiazÎncă nu există evaluări
- Inverted-T Beams: Experiments and Strut-and-Tie Modeling: Aci Structural Journal Technical PaperDocument10 paginiInverted-T Beams: Experiments and Strut-and-Tie Modeling: Aci Structural Journal Technical Paperchaval01Încă nu există evaluări
- Lecture Notes on Reinforced Concrete DesignDe la EverandLecture Notes on Reinforced Concrete DesignÎncă nu există evaluări
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionDe la EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionEvaluare: 2.5 din 5 stele2.5/5 (4)
- Beams and Framed Structures: Structures and Solid Body MechanicsDe la EverandBeams and Framed Structures: Structures and Solid Body MechanicsEvaluare: 3 din 5 stele3/5 (2)
- Basic Theory of Structures: The Commonwealth and International Library: Mechanical Engineering DivisionDe la EverandBasic Theory of Structures: The Commonwealth and International Library: Mechanical Engineering DivisionEvaluare: 4 din 5 stele4/5 (4)
- Constructed Layered Systems: Measurements and AnalysisDe la EverandConstructed Layered Systems: Measurements and AnalysisÎncă nu există evaluări
- Coupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsDe la EverandCoupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsÎncă nu există evaluări
- The Fatigue Strength of Transverse Fillet Welded Joints: A Study of the Influence of Joint GeometryDe la EverandThe Fatigue Strength of Transverse Fillet Welded Joints: A Study of the Influence of Joint GeometryÎncă nu există evaluări
- Ponte in FranciaDocument73 paginiPonte in FranciaVincenzo MondelliÎncă nu există evaluări
- Notes About CreepDocument2 paginiNotes About CreepVincenzo MondelliÎncă nu există evaluări
- Ceb-Fip Model Code 1990Document462 paginiCeb-Fip Model Code 1990Misgun SamuelÎncă nu există evaluări
- BCA - Worked Examples Design of Concrete BuildingDocument258 paginiBCA - Worked Examples Design of Concrete BuildingSaw Is Saw100% (27)
- BCA - Worked Examples Design of Concrete BuildingDocument258 paginiBCA - Worked Examples Design of Concrete BuildingSaw Is Saw100% (27)
- CedolinDocument1 paginăCedolinVincenzo MondelliÎncă nu există evaluări
- Deep BeamDocument6 paginiDeep BeamVincenzo MondelliÎncă nu există evaluări
- Travi EC2 VinctorinoDocument15 paginiTravi EC2 VinctorinoVincenzo MondelliÎncă nu există evaluări
- Deep BeamDocument6 paginiDeep BeamVincenzo MondelliÎncă nu există evaluări
- Operating Instructions: MCA 122 Modbus TCPDocument46 paginiOperating Instructions: MCA 122 Modbus TCPnefertiti551Încă nu există evaluări
- Tan Tzu enDocument68 paginiTan Tzu enLoc HuynhÎncă nu există evaluări
- Material Handling System and ASRS PDFDocument13 paginiMaterial Handling System and ASRS PDFHarsh PatelÎncă nu există evaluări
- Hepworth Clay DoPs - Full SetDocument54 paginiHepworth Clay DoPs - Full SetAnonymous XYAPaxjbYÎncă nu există evaluări
- Centrifugal PumpDocument56 paginiCentrifugal Pumpchandraa2208Încă nu există evaluări
- Castrol - Iceomatic SW 68Document7 paginiCastrol - Iceomatic SW 68advantage025Încă nu există evaluări
- Handling An Maintenance of Construction Machineries, Equipments and InstrumentsDocument13 paginiHandling An Maintenance of Construction Machineries, Equipments and InstrumentsVelmurugan BalasubramanianÎncă nu există evaluări
- Misumi s5m Pulley p1117Document1 paginăMisumi s5m Pulley p1117tigor carakaÎncă nu există evaluări
- Hydraulics - Civil Engineering Questions and Answers Page 3Document6 paginiHydraulics - Civil Engineering Questions and Answers Page 3umairÎncă nu există evaluări
- f77 f55 User ManualDocument36 paginif77 f55 User ManualGabi GabrielÎncă nu există evaluări
- Noise and VibrationDocument14 paginiNoise and VibrationABHISHEK V GOWDAÎncă nu există evaluări
- BSM BWMP - D1 and D2Document34 paginiBSM BWMP - D1 and D2Adnan DjamalÎncă nu există evaluări
- Pipe Color CodeDocument1 paginăPipe Color CodePatricia de los SantosÎncă nu există evaluări
- S.No - Project Title Name of The Students Area of Specialization PEO PODocument4 paginiS.No - Project Title Name of The Students Area of Specialization PEO PORasool ReddyÎncă nu există evaluări
- Rossler Chaotic Circuit and It's Application For Communication SecureDocument10 paginiRossler Chaotic Circuit and It's Application For Communication SecureMada Sanjaya WsÎncă nu există evaluări
- Adjustable Juice Groove Jig: Step 1: Jig Base and Bit DistanceDocument5 paginiAdjustable Juice Groove Jig: Step 1: Jig Base and Bit DistanceRod HyattÎncă nu există evaluări
- Material 1 HOUSEHOLD CHORES PICTURE DICTIONARYDocument12 paginiMaterial 1 HOUSEHOLD CHORES PICTURE DICTIONARYnerepeichÎncă nu există evaluări
- Electroplating of Silver, Zinc and IronDocument13 paginiElectroplating of Silver, Zinc and IronTahira AzamÎncă nu există evaluări
- Physics 02-07 Centripetal Force and Banked CurvesDocument2 paginiPhysics 02-07 Centripetal Force and Banked CurveslatteÎncă nu există evaluări
- Electrical & Civil-1resume PDFDocument2 paginiElectrical & Civil-1resume PDFanjar alamÎncă nu există evaluări
- Technical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaDocument6 paginiTechnical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaBash MatÎncă nu există evaluări
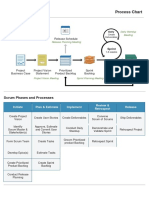
- Procesos SCRUMDocument2 paginiProcesos SCRUMRoseÎncă nu există evaluări
- Injection Molding TrainingDocument131 paginiInjection Molding TrainingNuria Varela100% (3)
- 010 Zircoat MDocument3 pagini010 Zircoat MvsdeepakchandraÎncă nu există evaluări
- 115 Test Out Study GuideFeb2017Document16 pagini115 Test Out Study GuideFeb2017Ashish MalikÎncă nu există evaluări
- AAAC Guideline For Apartment and Townhouse Acoustic Rating 2010Document10 paginiAAAC Guideline For Apartment and Townhouse Acoustic Rating 2010Benjamín AlainÎncă nu există evaluări
- Catalog C60H-DCDocument6 paginiCatalog C60H-DCNae MocioiÎncă nu există evaluări