S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- SPC Abc Security Agrmnt PDFDocument6 paginiSPC Abc Security Agrmnt PDFChristian Comunity100% (3)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Electrical Estimate Template PDFDocument1 paginăElectrical Estimate Template PDFMEGAWATT CONTRACTING AND ELECTRICITY COMPANYÎncă nu există evaluări
- Preventing OOS DeficienciesDocument65 paginiPreventing OOS Deficienciesnsk79in@gmail.comÎncă nu există evaluări
- SC-Rape-Sole Testimony of Prosecutrix If Reliable, Is Sufficient For Conviction. 12.08.2021Document5 paginiSC-Rape-Sole Testimony of Prosecutrix If Reliable, Is Sufficient For Conviction. 12.08.2021Sanjeev kumarÎncă nu există evaluări
- CSA Report Fahim Final-1Document10 paginiCSA Report Fahim Final-1Engr Fahimuddin QureshiÎncă nu există evaluări
- Exoskeleton ArmDocument5 paginiExoskeleton Armc214ocÎncă nu există evaluări
- Small Signal Analysis Section 5 6Document104 paginiSmall Signal Analysis Section 5 6fayazÎncă nu există evaluări
- Different Software Life Cycle Models: Mini Project OnDocument11 paginiDifferent Software Life Cycle Models: Mini Project OnSagar MurtyÎncă nu există evaluări
- Service ManualDocument30 paginiService ManualYoni CativaÎncă nu există evaluări
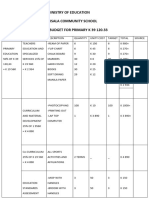
- Ministry of Education Musala SCHDocument5 paginiMinistry of Education Musala SCHlaonimosesÎncă nu există evaluări
- Quantity DiscountDocument22 paginiQuantity Discountkevin royÎncă nu există evaluări
- Quantum Hopfield NetworksDocument83 paginiQuantum Hopfield NetworksSiddharth SharmaÎncă nu există evaluări
- Aluminium Extrusion Industry in IndiaDocument3 paginiAluminium Extrusion Industry in Indiakalan45Încă nu există evaluări
- Economies and Diseconomies of ScaleDocument7 paginiEconomies and Diseconomies of Scale2154 taibakhatunÎncă nu există evaluări
- Windsor Machines LimitedDocument12 paginiWindsor Machines LimitedAlaina LongÎncă nu există evaluări
- Guidelines Use of The Word AnzacDocument28 paginiGuidelines Use of The Word AnzacMichael SmithÎncă nu există evaluări
- DT2 (80 82)Document18 paginiDT2 (80 82)Anonymous jbeHFUÎncă nu există evaluări
- Sciencedirect: Jad Imseitif, He Tang, Mike Smith Jad Imseitif, He Tang, Mike SmithDocument10 paginiSciencedirect: Jad Imseitif, He Tang, Mike Smith Jad Imseitif, He Tang, Mike SmithTushar singhÎncă nu există evaluări
- Case Notes All Cases Family II TermDocument20 paginiCase Notes All Cases Family II TermRishi Aneja100% (1)
- Customer Satisfaction-ICICI Bank-Priyanka DhamijaDocument85 paginiCustomer Satisfaction-ICICI Bank-Priyanka DhamijaVarun GuptaÎncă nu există evaluări
- Random Variable N N Mean or Expected Value: Number of Ducks Type of Duck AmountDocument2 paginiRandom Variable N N Mean or Expected Value: Number of Ducks Type of Duck AmountAngie PastorÎncă nu există evaluări
- Chapter 1: Investment Landscape: Financial GoalsDocument8 paginiChapter 1: Investment Landscape: Financial GoalsshubhamÎncă nu există evaluări
- Tenancy Law ReviewerDocument19 paginiTenancy Law ReviewerSef KimÎncă nu există evaluări
- Vodafone M2M Integrated M2M Terminals Overview BrochureDocument4 paginiVodafone M2M Integrated M2M Terminals Overview BrochureJamie JordanÎncă nu există evaluări
- Residential BuildingDocument5 paginiResidential Buildingkamaldeep singhÎncă nu există evaluări
- Dr. Najeebuddin Ahmed: 969 Canterbury Road, Lakemba, Sydney, NSW, Australia, 2195Document2 paginiDr. Najeebuddin Ahmed: 969 Canterbury Road, Lakemba, Sydney, NSW, Australia, 2195Najeebuddin AhmedÎncă nu există evaluări
- The "Solid Mount": Installation InstructionsDocument1 paginăThe "Solid Mount": Installation InstructionsCraig MathenyÎncă nu există evaluări
- Lecture 1Document11 paginiLecture 1Taniah Mahmuda Tinni100% (1)
- Modulation and Frequency Synthesis X Digital Wireless RadioDocument233 paginiModulation and Frequency Synthesis X Digital Wireless Radiolcnblzr3877Încă nu există evaluări
- In Partial Fulfillment of The Requirements For The Award of The Degree ofDocument66 paginiIn Partial Fulfillment of The Requirements For The Award of The Degree ofcicil josyÎncă nu există evaluări