S-ar putea să vă placă și
- Mantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409De la EverandMantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409Evaluare: 4.5 din 5 stele4.5/5 (7)
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposDe la EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposEvaluare: 5 din 5 stele5/5 (1)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe la EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoEvaluare: 4 din 5 stele4/5 (4)
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De la EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Evaluare: 1 din 5 stele1/5 (2)
- Mantenimiento de motores térmicos de dos y cuatro tiempos. TMVG0409De la EverandMantenimiento de motores térmicos de dos y cuatro tiempos. TMVG0409Evaluare: 4 din 5 stele4/5 (1)
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De la EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Încă nu există evaluări
- Energía Eólica. Integración a la red eléctricaDe la EverandEnergía Eólica. Integración a la red eléctricaEvaluare: 3.5 din 5 stele3.5/5 (4)
- Montaje y mantenimiento de transformadores. ELEE0109De la EverandMontaje y mantenimiento de transformadores. ELEE0109Încă nu există evaluări
- Curso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasDe la EverandCurso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasÎncă nu există evaluări
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDe la EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoÎncă nu există evaluări
- Seleccion de Motorreductor Algunos Calculos PDFDocument51 paginiSeleccion de Motorreductor Algunos Calculos PDFJaqo Yance95% (43)
- Curso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaDe la EverandCurso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaÎncă nu există evaluări
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorDe la EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorÎncă nu există evaluări
- Análisis FFT de Velocidad Bomba Amarilla Toma VerticalDocument11 paginiAnálisis FFT de Velocidad Bomba Amarilla Toma VerticalDaniel Mena VegaÎncă nu există evaluări
- Tipos de ArranquesDocument15 paginiTipos de ArranquesVILLAMAR ALVAREZ CARLOS ADRIANÎncă nu există evaluări
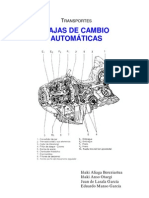
- Caja Automatica 2Document24 paginiCaja Automatica 2agalarzag86% (7)
- Puntos de Fisica Ondas y ParticulasDocument10 paginiPuntos de Fisica Ondas y ParticulasJairoÎncă nu există evaluări
- Pruebas Que Se Efectuan A Los Motores de Combustión InternaDocument17 paginiPruebas Que Se Efectuan A Los Motores de Combustión InternaOctavinho Corona Salinas50% (4)
- Operaciones auxiliares de servicios de la aeronave. TMVO0109De la EverandOperaciones auxiliares de servicios de la aeronave. TMVO0109Încă nu există evaluări
- Tema 1 Introducción A La Teoría de Mecanismos y MáquinasDocument17 paginiTema 1 Introducción A La Teoría de Mecanismos y Máquinasalbertocc1978Încă nu există evaluări
- Sonido Fisica IIDocument5 paginiSonido Fisica IIheberÎncă nu există evaluări
- Transmisión de Potencia Mecanica.Document55 paginiTransmisión de Potencia Mecanica.tip312Încă nu există evaluări
- TEMA10-Contaminación de Las AguasDocument27 paginiTEMA10-Contaminación de Las Aguasalbertocc1978Încă nu există evaluări
- Dinamica Del Motor Asincrono PDFDocument14 paginiDinamica Del Motor Asincrono PDFJon BrownÎncă nu există evaluări
- Manual de Curso de Automatizacion Industrial IiiDocument43 paginiManual de Curso de Automatizacion Industrial IiiJonathan CardenasÎncă nu există evaluări
- Practica Sistemas de Segundo Orden.Document7 paginiPractica Sistemas de Segundo Orden.tonyÎncă nu există evaluări
- Control de Velocidad de Motores CCDocument8 paginiControl de Velocidad de Motores CCElvis Jonnathan SaguayÎncă nu există evaluări
- Arranque Estrella Triángulo Temporizado, Con Inversor de Giro Pasando Por Paro de Un Motor AsíncronoDocument16 paginiArranque Estrella Triángulo Temporizado, Con Inversor de Giro Pasando Por Paro de Un Motor AsíncronoWilmer Cubas SolanoÎncă nu există evaluări
- Mapa Conceptual Edgar Corona Com2Document20 paginiMapa Conceptual Edgar Corona Com2Edgar Ignacio Corona ZamoraÎncă nu există evaluări
- Freno de PronyDocument6 paginiFreno de PronyDamianMenaÎncă nu există evaluări
- Análisis Funcional de Una Extractora de AceiteDocument22 paginiAnálisis Funcional de Una Extractora de AceiteDeyber EscobarÎncă nu există evaluări
- TrabaAplicación de Dispositivos de Electrónica de Potencias en El Ámbito de La Automatizaciónjo de Investigacion Electronica de Potencias - Francisco MaturanaDocument58 paginiTrabaAplicación de Dispositivos de Electrónica de Potencias en El Ámbito de La Automatizaciónjo de Investigacion Electronica de Potencias - Francisco MaturanaFrancisco Xavier-Ignacio Maturana DelgadilloÎncă nu există evaluări
- Freno-Prony Versión 2Document7 paginiFreno-Prony Versión 2Marius Allan PoeÎncă nu există evaluări
- Informe Motor CCDocument21 paginiInforme Motor CCcristian astudilloÎncă nu există evaluări
- Me 1 Capitulo 1Document23 paginiMe 1 Capitulo 1Manuel Paulin100% (1)
- Práctica #4 - Simulador Cade SimuDocument18 paginiPráctica #4 - Simulador Cade SimuJulio José Casahuaman GonzalesÎncă nu există evaluări
- Control y Regulación de La Velocidad en Motores AsincrónicoDocument7 paginiControl y Regulación de La Velocidad en Motores AsincrónicoFabian PerezÎncă nu există evaluări
- Trabajo 3Document9 paginiTrabajo 3YealsatoÎncă nu există evaluări
- Arranque y Frenado de Maquinas ElectricasDocument13 paginiArranque y Frenado de Maquinas ElectricasZhandra AgüiñoÎncă nu există evaluări
- Cuestionario Laboratorio de MaquinasDocument11 paginiCuestionario Laboratorio de MaquinasEnriqueGDÎncă nu există evaluări
- Que Es Un Esfuerzo Selector Dinámico y ElectromecánicoDocument11 paginiQue Es Un Esfuerzo Selector Dinámico y ElectromecánicoAndrea GranadosÎncă nu există evaluări
- Control y Regulación de La Velocidad en Motores Asincrónicos TrifásicosDocument6 paginiControl y Regulación de La Velocidad en Motores Asincrónicos TrifásicosOliverio ZavalaÎncă nu există evaluări
- Unidad 3 - Accionamiento Mecánico - Me01 F1 TivDocument26 paginiUnidad 3 - Accionamiento Mecánico - Me01 F1 TivYsaac YhofrenÎncă nu există evaluări
- Volantes de InerciaDocument9 paginiVolantes de InerciaGonz RomeroÎncă nu există evaluări
- Sistemas de de Arranque de Los Motores TrifásicosDocument10 paginiSistemas de de Arranque de Los Motores TrifásicosVictor FernándezÎncă nu există evaluări
- Sistemas de Aire AcondicionadoDocument52 paginiSistemas de Aire AcondicionadoCarlos AguilarÎncă nu există evaluări
- Curso de Termodinamica IvecoDocument47 paginiCurso de Termodinamica IvecoOscar Del PuertoÎncă nu există evaluări
- Bloqueo en Dos Sentidos de Giro Del MotorDocument8 paginiBloqueo en Dos Sentidos de Giro Del MotorNazareth Amador HernándezÎncă nu există evaluări
- Informe Previo 5 Analisis TemporalDocument9 paginiInforme Previo 5 Analisis TemporalLuisCabreraOroscoÎncă nu există evaluări
- UNIDAD 6 VolantesDocument18 paginiUNIDAD 6 VolantesJeremías Arias Tapia100% (1)
- Freno de Prony y DinamometrosDocument13 paginiFreno de Prony y DinamometroskleberÎncă nu există evaluări
- Análisis Transitorio de Motores Asíncronos y Simulación para Determinar Variaciones de La Temperatura en El Devanado PDFDocument10 paginiAnálisis Transitorio de Motores Asíncronos y Simulación para Determinar Variaciones de La Temperatura en El Devanado PDFManuel Mamani LeónÎncă nu există evaluări
- Motores Electricos 2020 1Document15 paginiMotores Electricos 2020 1caisaÎncă nu există evaluări
- Introducción A Las Máquinas EléctricasDocument5 paginiIntroducción A Las Máquinas EléctricasBrayan Granados CárdenasÎncă nu există evaluări
- Practica Motor CDDocument5 paginiPractica Motor CDJDavidSGÎncă nu există evaluări
- Control de Laboratorio 3Document6 paginiControl de Laboratorio 3Robert Alburqueque NoleÎncă nu există evaluări
- Taller 5 de Màquinas ElectricasDocument3 paginiTaller 5 de Màquinas ElectricasAbdiel AguilarÎncă nu există evaluări
- Estabilidad Sistemas Electricos de Potencia PDFDocument25 paginiEstabilidad Sistemas Electricos de Potencia PDFJuan Camilo Rivera MayaÎncă nu există evaluări
- Trabajo Práctico Semana 4 MauricioBenitezDocument5 paginiTrabajo Práctico Semana 4 MauricioBenitezMauricio BenitezÎncă nu există evaluări
- Calculo de Consumo de Energia Motor Trifasico ElectricoDocument20 paginiCalculo de Consumo de Energia Motor Trifasico ElectricoEduar Milton Quiroga Campos100% (1)
- Basic of AC Drives-Control de MaquinasDocument11 paginiBasic of AC Drives-Control de MaquinasIván DominguezÎncă nu există evaluări
- Potencias y Fuentes de EnergíaDocument6 paginiPotencias y Fuentes de Energíagamerpro30102004Încă nu există evaluări
- Investigación Sobre RendimientosDocument7 paginiInvestigación Sobre Rendimientosdali mojicaÎncă nu există evaluări
- Primera Evaluación Maq-1Document23 paginiPrimera Evaluación Maq-1Alexander SosaÎncă nu există evaluări
- Pruebas Efectuadas en Los Motores de Combustión InternaDocument7 paginiPruebas Efectuadas en Los Motores de Combustión InternaAngel Bailey BaezaÎncă nu există evaluări
- Practica 5 Automatizacion Industrial Circuitos Hidraulicos y Neumaticos.Document6 paginiPractica 5 Automatizacion Industrial Circuitos Hidraulicos y Neumaticos.Emmanueel FariiasÎncă nu există evaluări
- 68 Deshidratación de FangosDocument11 pagini68 Deshidratación de Fangosalbertocc1978Încă nu există evaluări
- 2 Diseño y Fabricación de Mezclas Bituminosas en Caliente - Jacinto L García - SacyrDocument14 pagini2 Diseño y Fabricación de Mezclas Bituminosas en Caliente - Jacinto L García - Sacyralbertocc1978Încă nu există evaluări
- Ejercicios Del Método de CrossDocument6 paginiEjercicios Del Método de Crossalbertocc1978Încă nu există evaluări
- Síntesis Analítica de Mecanismos. Sistemas MecánicosDocument23 paginiSíntesis Analítica de Mecanismos. Sistemas Mecánicosalbertocc1978Încă nu există evaluări
- Tema 5. Equilibrado de MasasDocument20 paginiTema 5. Equilibrado de Masasalbertocc1978Încă nu există evaluări
- Tema 4. Análisis Dinámico de Mecanismos PlanosDocument20 paginiTema 4. Análisis Dinámico de Mecanismos Planosalbertocc1978Încă nu există evaluări
- Tema 2 - Segunda Parte. Análisis Cinemático de Mecanismos PlanosDocument38 paginiTema 2 - Segunda Parte. Análisis Cinemático de Mecanismos Planosalbertocc1978100% (1)
- Taller 2do CORTEDocument6 paginiTaller 2do CORTEStephanie MoralesÎncă nu există evaluări
- Efecto Doppler y FondulatoriosDocument21 paginiEfecto Doppler y FondulatoriosNatalia KarinaÎncă nu există evaluări
- Ejercicios 1 17Document11 paginiEjercicios 1 17Sergio Segales EscalanteÎncă nu există evaluări
- Resonancia en Circuitos RLC SerieDocument9 paginiResonancia en Circuitos RLC SerieErbeth Delgado AlvaÎncă nu există evaluări
- 3.0 Parámetros de AntenasDocument51 pagini3.0 Parámetros de AntenasGibran SilvaÎncă nu există evaluări
- ESPECTROCOLORIMETRÍADocument5 paginiESPECTROCOLORIMETRÍAMarialesalamancÎncă nu există evaluări
- Eva1 CcaDocument8 paginiEva1 CcaAlejandro Pérez VelizÎncă nu există evaluări
- Repartido para Prueba EFEDocument2 paginiRepartido para Prueba EFEEric PadillaÎncă nu există evaluări
- Pendulos AcopladosDocument4 paginiPendulos AcopladosJuan Miguel Lopez ParraÎncă nu există evaluări
- Interferencia y ResonanciaDocument6 paginiInterferencia y ResonanciaDavid Ramses Olalde HerreraÎncă nu există evaluări
- Laboratorio Virtual Fisica Ondas EstacionariasDocument14 paginiLaboratorio Virtual Fisica Ondas EstacionariasÁngela BernalÎncă nu există evaluări
- Taller de Refuerzo p1 y p2 Física UndécimoDocument3 paginiTaller de Refuerzo p1 y p2 Física UndécimoLeonarda Rueda CamachoÎncă nu există evaluări
- Pnedulo Sim PDFDocument12 paginiPnedulo Sim PDFAnthony Guachisaca SotoÎncă nu există evaluări
- El Movimiento PendularDocument4 paginiEl Movimiento PendularJenifer Huaraca TorresÎncă nu există evaluări
- Espacio de FaseDocument21 paginiEspacio de FasePablo Martin CadenaÎncă nu există evaluări
- ,FLSDLFSDLFDocument13 pagini,FLSDLFSDLFbarretvolcano 29Încă nu există evaluări
- Lab.5 OSCILACIONES AMORTIGUADASDocument11 paginiLab.5 OSCILACIONES AMORTIGUADASJuniorRomeroÎncă nu există evaluări
- Unidad 4-Parte 2Document14 paginiUnidad 4-Parte 2Luis AlanizÎncă nu există evaluări
- Ondas ViajerasDocument6 paginiOndas ViajerasMontserrat CLÎncă nu există evaluări
- Modelo de La Máquina Sincrónica y Análisis de EstabilidadDocument61 paginiModelo de La Máquina Sincrónica y Análisis de Estabilidadmanolito0712Încă nu există evaluări
- Ondas Y Calor Informe #04: "Movimiento Oscilatorio de Un Péndulo Simple"Document10 paginiOndas Y Calor Informe #04: "Movimiento Oscilatorio de Un Péndulo Simple"gabrielÎncă nu există evaluări
- Checklist Instalación: Nota Soporte Nuevo Soporte ExistenteDocument13 paginiChecklist Instalación: Nota Soporte Nuevo Soporte Existenteluis angel chinchay bermeoÎncă nu există evaluări
- (LAB.5) Taller Efecto DopplerDocument3 pagini(LAB.5) Taller Efecto DopplerKevin Rendon0% (1)
- 123Document4 pagini123Bleidy ArizaÎncă nu există evaluări
- FisicaDocument8 paginiFisicaSixtoÎncă nu există evaluări
- Principios Fisicos Del UltrasonidoDocument20 paginiPrincipios Fisicos Del UltrasonidoFernandoÎncă nu există evaluări