S-ar putea să vă placă și
- Negotiating Skills Negotiating Skills: To Provide You With The Skills To Plan & Implement Successful NegotiationDocument32 paginiNegotiating Skills Negotiating Skills: To Provide You With The Skills To Plan & Implement Successful NegotiationKanimozhi.SÎncă nu există evaluări
- Implimantation of Statistical Process Control in Small Scale Industries-A ReviewDocument4 paginiImplimantation of Statistical Process Control in Small Scale Industries-A ReviewijeteeditorÎncă nu există evaluări
- DSP ReportDocument5 paginiDSP ReportKurnia WanÎncă nu există evaluări
- Chapter 2 - FIR Filters - Digital Filter DesignDocument100 paginiChapter 2 - FIR Filters - Digital Filter DesignSanjay BalwaniÎncă nu există evaluări
- Modulo EminicDocument13 paginiModulo EminicAndreaÎncă nu există evaluări
- DSP Viva Questions PDFDocument4 paginiDSP Viva Questions PDFMallikharjuna GoruÎncă nu există evaluări
- Effect of Windowing Methods On Performance of FIR Filter DesignDocument4 paginiEffect of Windowing Methods On Performance of FIR Filter DesignijsretÎncă nu există evaluări
- 70 Valves SolenoidDocument105 pagini70 Valves SolenoidrizalÎncă nu există evaluări
- Low-Pass Digital Filtering From RapidSTM32Document23 paginiLow-Pass Digital Filtering From RapidSTM32jackabrahamÎncă nu există evaluări
- Richardson Heidegger PDFDocument18 paginiRichardson Heidegger PDFweltfremdheitÎncă nu există evaluări
- TIMO Final 2020-2021 P3Document5 paginiTIMO Final 2020-2021 P3An Nguyen100% (2)
- Use of PET (POLY ETHYLENE TERAPHTALATE) WASTE in Bituminous Road Construction - A Critical ReviewDocument4 paginiUse of PET (POLY ETHYLENE TERAPHTALATE) WASTE in Bituminous Road Construction - A Critical ReviewijeteeditorÎncă nu există evaluări
- Electrical Vehicle Charging by Wireless Power Transfer Using High-Power Three Level DC-DC ConvertersDocument5 paginiElectrical Vehicle Charging by Wireless Power Transfer Using High-Power Three Level DC-DC ConvertersijeteeditorÎncă nu există evaluări
- Determining Optimum Coefficients of IIR Digital Filter Using Analog To Digital MappingDocument5 paginiDetermining Optimum Coefficients of IIR Digital Filter Using Analog To Digital MappingDora TengÎncă nu există evaluări
- IIR Filter Design and Analysis Using Notch and Comb FilterDocument4 paginiIIR Filter Design and Analysis Using Notch and Comb FilterijsretÎncă nu există evaluări
- High Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationsDocument10 paginiHigh Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationsAmit RajÎncă nu există evaluări
- Digital Filter DesigningDocument6 paginiDigital Filter DesigningToalha TosrifÎncă nu există evaluări
- High Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationsDocument10 paginiHigh Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationslathavenkyÎncă nu există evaluări
- Class Notes - Digital Filters For Numerical RelayDocument4 paginiClass Notes - Digital Filters For Numerical RelaybiswajitsahooÎncă nu există evaluări
- Iir FilterDocument10 paginiIir FilterSurajSinghÎncă nu există evaluări
- Design of FIR Filter Using Genetic Algorithm: Samrat Banerjee, Sriparna Dey, Supriya DhabalDocument6 paginiDesign of FIR Filter Using Genetic Algorithm: Samrat Banerjee, Sriparna Dey, Supriya DhabalerpublicationÎncă nu există evaluări
- Performance Analysis of IIR Digital Band Stop Filter: AbstractDocument8 paginiPerformance Analysis of IIR Digital Band Stop Filter: AbstractIan RonquilloÎncă nu există evaluări
- FIR Filter Design Using Mixed Algorithms: A Survey: Vikash Kumar, Mr. Vaibhav PurwarDocument5 paginiFIR Filter Design Using Mixed Algorithms: A Survey: Vikash Kumar, Mr. Vaibhav Purwaranil kasotÎncă nu există evaluări
- Digitalfiltersnotes 15 Oct 2018Document15 paginiDigitalfiltersnotes 15 Oct 2018Gayatri ShindeÎncă nu există evaluări
- Design and Comparison of Butterworth and Chebyshev Type-1 Low Pass Filter Using MatlabDocument16 paginiDesign and Comparison of Butterworth and Chebyshev Type-1 Low Pass Filter Using MatlabResearch Cell: An International Journal of Engineering SciencesÎncă nu există evaluări
- IEEE Research PaperDocument3 paginiIEEE Research PaperKishor Pawase0% (1)
- Design and Performance Analysis of A Reconfigurable Fir FilterDocument8 paginiDesign and Performance Analysis of A Reconfigurable Fir FilterKRISHNARAJ RÎncă nu există evaluări
- Optimal IIR Filter Design Using Novel Particle Swarm Optimization TechniqueDocument12 paginiOptimal IIR Filter Design Using Novel Particle Swarm Optimization TechniquemenguemengueÎncă nu există evaluări
- Design of FIR Filter For Burst Mode Demodulator of Satellite ReceiverDocument5 paginiDesign of FIR Filter For Burst Mode Demodulator of Satellite ReceiverRimsha MaryamÎncă nu există evaluări
- Digital Signal Processing - AnDocument66 paginiDigital Signal Processing - AnRiddhi ShuklaÎncă nu există evaluări
- Denoising Real-Time Audio Signals Using Matlab Filter TechniquesDocument10 paginiDenoising Real-Time Audio Signals Using Matlab Filter TechniquesBhuvan BlueÎncă nu există evaluări
- Bangladesh University of Business & Technology: Department of Electrical & Electronic EngineeringDocument38 paginiBangladesh University of Business & Technology: Department of Electrical & Electronic EngineeringShohel RanaÎncă nu există evaluări
- FIR and IIR FiltersDocument6 paginiFIR and IIR FiltersJames Russel RondillaÎncă nu există evaluări
- 03 10 2015 PDFDocument12 pagini03 10 2015 PDFRama ArdiansyahÎncă nu există evaluări
- Digital Filteration of ECG Signals For Removal of Baseline DriftDocument5 paginiDigital Filteration of ECG Signals For Removal of Baseline DriftSeema SinglaÎncă nu există evaluări
- VLSI Design of Half-Band IIR Interpolation and Decimation FilterDocument7 paginiVLSI Design of Half-Band IIR Interpolation and Decimation FiltertansnvarmaÎncă nu există evaluări
- Design and Implementation of Butterworth, Chebyshev-I and Elliptic Filter For Speech Signal AnalysisDocument7 paginiDesign and Implementation of Butterworth, Chebyshev-I and Elliptic Filter For Speech Signal AnalysisrectifiedÎncă nu există evaluări
- Design and Analysis of Band Pass Fir Filter Using Different Window Techniques IJERTV3IS20288Document6 paginiDesign and Analysis of Band Pass Fir Filter Using Different Window Techniques IJERTV3IS20288Minimol RajÎncă nu există evaluări
- Chebyshev Filter at 197.12 MHZ Frequency For Radar System: Denny Permana, Novita Dwi SusantiDocument6 paginiChebyshev Filter at 197.12 MHZ Frequency For Radar System: Denny Permana, Novita Dwi SusantiInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Research On Analog Bandwidth Enhancement Technology For Digital Storage OscilloscopeDocument4 paginiResearch On Analog Bandwidth Enhancement Technology For Digital Storage OscilloscopeMarioÎncă nu există evaluări
- Kiings DSPDocument4 paginiKiings DSPkar07indiaÎncă nu există evaluări
- FIR Filter Design Using Mixed Algorithm: Vikash Kumar, Mr. Vaibhav PurwarDocument5 paginiFIR Filter Design Using Mixed Algorithm: Vikash Kumar, Mr. Vaibhav Purwaranil kasotÎncă nu există evaluări
- Design and Analysis of A Three-Stage Decimation Filter For Signal Processing ApplicationsDocument6 paginiDesign and Analysis of A Three-Stage Decimation Filter For Signal Processing ApplicationsInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- What Is FilteringDocument17 paginiWhat Is FilteringShoaib RathoreÎncă nu există evaluări
- Some Case Studies on Signal, Audio and Image Processing Using MatlabDe la EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabÎncă nu există evaluări
- Digital Filter - WikipediaDocument27 paginiDigital Filter - WikipediaanntreesajoeÎncă nu există evaluări
- Unit 6Document69 paginiUnit 6tbijleÎncă nu există evaluări
- A Wideband Digital RF Receiver Front-End Employing A New Discrete-Time Filter For M-WimaxDocument10 paginiA Wideband Digital RF Receiver Front-End Employing A New Discrete-Time Filter For M-WimaxFarhan AliÎncă nu există evaluări
- Rocha Et Al. - Method To Measure Displacement and Velocityfrom Acceleration Signals - 2016Document8 paginiRocha Et Al. - Method To Measure Displacement and Velocityfrom Acceleration Signals - 2016Paulo PereiraÎncă nu există evaluări
- Uwave Filter Paper PDFDocument5 paginiUwave Filter Paper PDFyogesh israniÎncă nu există evaluări
- 12 - DTSP Experiment No. 4Document5 pagini12 - DTSP Experiment No. 4Sneha shettyÎncă nu există evaluări
- An Efficient Implementation of FIR Filter Using High Speed Adders For Signal Processing ApplicationsDocument5 paginiAn Efficient Implementation of FIR Filter Using High Speed Adders For Signal Processing ApplicationshariÎncă nu există evaluări
- Iir Filters CopyDocument2 paginiIir Filters CopyNaav BamililiÎncă nu există evaluări
- Optimization of Fir Filters Using MCM and CSE Techniques: Pankaj Gupta, Mandeep KaurDocument9 paginiOptimization of Fir Filters Using MCM and CSE Techniques: Pankaj Gupta, Mandeep KaurRatnakarVarunÎncă nu există evaluări
- Kings: Department of Electronics and Communication EngineeringDocument5 paginiKings: Department of Electronics and Communication EngineeringA RahmanÎncă nu există evaluări
- Lab Sheet: Faculty of Engineering & TechnologyDocument12 paginiLab Sheet: Faculty of Engineering & TechnologyMun Kit ChokÎncă nu există evaluări
- 18ee63 DSP Module-3Document19 pagini18ee63 DSP Module-3Appasabgouda BiradarÎncă nu există evaluări
- Average FilteringDocument22 paginiAverage Filtering7204263474Încă nu există evaluări
- Design of Cost Effective Custom Filter: Ankita Mandal, Vikas MittalDocument7 paginiDesign of Cost Effective Custom Filter: Ankita Mandal, Vikas MittalIJERDÎncă nu există evaluări
- Comparison of FPGA Based FIR Filter Using Direct Form and Convolution Based AlgorithmDocument10 paginiComparison of FPGA Based FIR Filter Using Direct Form and Convolution Based AlgorithmSwapnil TotaniÎncă nu există evaluări
- Lab # 07 IIR PDFDocument13 paginiLab # 07 IIR PDFIrfan HaiderÎncă nu există evaluări
- Design and Simulation of Hairpin Band Pass Filter For Different SubstrateDocument3 paginiDesign and Simulation of Hairpin Band Pass Filter For Different SubstrateerpublicationÎncă nu există evaluări
- And Elliptic Filter For Speech Signal Analysis Design and Implementation of Butterworth, Chebyshev-IDocument7 paginiAnd Elliptic Filter For Speech Signal Analysis Design and Implementation of Butterworth, Chebyshev-IIslam BmlÎncă nu există evaluări
- 5filter Design EquilizationDocument11 pagini5filter Design EquilizationharithÎncă nu există evaluări
- Design of Concurrent Dual-Band Filters For GSM Application: (ICCIP-2019) Available On: Elsevier-SSRNDocument8 paginiDesign of Concurrent Dual-Band Filters For GSM Application: (ICCIP-2019) Available On: Elsevier-SSRNAHMED ALANIÎncă nu există evaluări
- Chap 7Document64 paginiChap 7JunaidAhmadÎncă nu există evaluări
- Design of Multiplier Less 32 Tap FIR Filter Using VHDL: JournalDocument5 paginiDesign of Multiplier Less 32 Tap FIR Filter Using VHDL: JournalIJMERÎncă nu există evaluări
- Modeling and Simulation of Single Phase CycloconvertorDocument3 paginiModeling and Simulation of Single Phase CycloconvertorijeteeditorÎncă nu există evaluări
- Near-Net-Shape Superplastic Forming of Intricate Shaped Magnesium Alloy ComponentsDocument8 paginiNear-Net-Shape Superplastic Forming of Intricate Shaped Magnesium Alloy ComponentsijeteeditorÎncă nu există evaluări
- Overview of Digital Audio Steganography TechniquesDocument5 paginiOverview of Digital Audio Steganography TechniquesijeteeditorÎncă nu există evaluări
- Buckling Analysis of Rectangular Plate by Split-Deflection MethodDocument4 paginiBuckling Analysis of Rectangular Plate by Split-Deflection MethodijeteeditorÎncă nu există evaluări
- Drying Characteristics of Fruits Using Solar DryingDocument5 paginiDrying Characteristics of Fruits Using Solar DryingijeteeditorÎncă nu există evaluări
- Automated Water Distribution System For Smart City Using PLC and ScadaDocument4 paginiAutomated Water Distribution System For Smart City Using PLC and ScadaijeteeditorÎncă nu există evaluări
- Current Mode Controller Design For Single Phase Grid Connected Inverter Using Proportional Resonant Control StrategyDocument6 paginiCurrent Mode Controller Design For Single Phase Grid Connected Inverter Using Proportional Resonant Control StrategyijeteeditorÎncă nu există evaluări
- An Efficient and Reliable Data Routing For In-Network Aggregation in Wireless Sensor NetworkDocument4 paginiAn Efficient and Reliable Data Routing For In-Network Aggregation in Wireless Sensor NetworkijeteeditorÎncă nu există evaluări
- Experimental Study On Self Curing Concrete Using Sodium LignosulphonateDocument5 paginiExperimental Study On Self Curing Concrete Using Sodium LignosulphonateijeteeditorÎncă nu există evaluări
- An Experimental Work On Concrete by Adding Bacillus SubtilisDocument5 paginiAn Experimental Work On Concrete by Adding Bacillus SubtilisijeteeditorÎncă nu există evaluări
- Digital Watermarking Using Least Significant Bit AlgorithmDocument4 paginiDigital Watermarking Using Least Significant Bit AlgorithmijeteeditorÎncă nu există evaluări
- Copy-Move Forgery Detection Using DCTDocument5 paginiCopy-Move Forgery Detection Using DCTijeteeditorÎncă nu există evaluări
- Recommendations For Students With High Functioning AutismDocument7 paginiRecommendations For Students With High Functioning AutismLucia SaizÎncă nu există evaluări
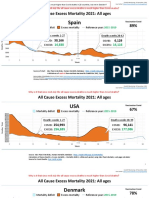
- Countries EXCESS DEATHS All Ages - 15nov2021Document21 paginiCountries EXCESS DEATHS All Ages - 15nov2021robaksÎncă nu există evaluări
- IKEA SHANGHAI Case StudyDocument5 paginiIKEA SHANGHAI Case StudyXimo NetteÎncă nu există evaluări
- CX Programmer Operation ManualDocument536 paginiCX Programmer Operation ManualVefik KaraegeÎncă nu există evaluări
- Guidelines For SKPMG2 TSSP - Draft For Consultation 10.10.17Document5 paginiGuidelines For SKPMG2 TSSP - Draft For Consultation 10.10.17zqhnazÎncă nu există evaluări
- Prelim Examination MaternalDocument23 paginiPrelim Examination MaternalAaron ConstantinoÎncă nu există evaluări
- Ricoh IM C2000 IM C2500: Full Colour Multi Function PrinterDocument4 paginiRicoh IM C2000 IM C2500: Full Colour Multi Function PrinterKothapalli ChiranjeeviÎncă nu există evaluări
- 13 Adsorption of Congo Red A Basic Dye by ZnFe-CO3Document10 pagini13 Adsorption of Congo Red A Basic Dye by ZnFe-CO3Jorellie PetalverÎncă nu există evaluări
- Parliament of India: Rajya SabhaDocument64 paginiParliament of India: Rajya SabhaSivapothuraju KonathalaÎncă nu există evaluări
- in Strategic Management What Are The Problems With Maintaining A High Inventory As Experienced Previously With Apple?Document5 paginiin Strategic Management What Are The Problems With Maintaining A High Inventory As Experienced Previously With Apple?Priyanka MurthyÎncă nu există evaluări
- Hole CapacityDocument2 paginiHole CapacityAbdul Hameed OmarÎncă nu există evaluări
- Unit 16 - Monitoring, Review and Audit by Allan WatsonDocument29 paginiUnit 16 - Monitoring, Review and Audit by Allan WatsonLuqman OsmanÎncă nu există evaluări
- Ito Na Talaga Yung FinalDocument22 paginiIto Na Talaga Yung FinalJonas Gian Miguel MadarangÎncă nu există evaluări
- Talking Art As The Spirit Moves UsDocument7 paginiTalking Art As The Spirit Moves UsUCLA_SPARCÎncă nu există evaluări
- B122 - Tma03Document7 paginiB122 - Tma03Martin SantambrogioÎncă nu există evaluări
- FAMOUS PP Past TenseDocument21 paginiFAMOUS PP Past Tenseme me kyawÎncă nu există evaluări
- Post Appraisal InterviewDocument3 paginiPost Appraisal InterviewNidhi D100% (1)
- MGMT Audit Report WritingDocument28 paginiMGMT Audit Report WritingAndrei IulianÎncă nu există evaluări
- Crown WF-3000 1.2Document5 paginiCrown WF-3000 1.2Qirat KhanÎncă nu există evaluări
- Soosan Crane Training: (Principles)Document119 paginiSoosan Crane Training: (Principles)Boumediene CHIKHAOUIÎncă nu există evaluări
- Developing Paragraphs: Test Section - Writing Task 2Document11 paginiDeveloping Paragraphs: Test Section - Writing Task 2Cengizhan AkdağÎncă nu există evaluări
- DPSD ProjectDocument30 paginiDPSD ProjectSri NidhiÎncă nu există evaluări
- School of Mathematics 2021 Semester 1 MAT1841 Continuous Mathematics For Computer Science Assignment 1Document2 paginiSchool of Mathematics 2021 Semester 1 MAT1841 Continuous Mathematics For Computer Science Assignment 1STEM Education Vung TauÎncă nu există evaluări
- Waterstop TechnologyDocument69 paginiWaterstop TechnologygertjaniÎncă nu există evaluări
- Chemistry Test 1Document2 paginiChemistry Test 1shashankÎncă nu există evaluări