S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Lehninger Biochem Ch 1-2 ReviewDocument13 paginiLehninger Biochem Ch 1-2 ReviewHugo DuarteÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Space DynamicsDocument37 paginiSpace Dynamicspurushottam KashyapÎncă nu există evaluări
- Tut 12 Multiple Char Reactions TutorialDocument19 paginiTut 12 Multiple Char Reactions TutorialRubén Alfonso Pérez JeldresÎncă nu există evaluări
- Boiler Cycle Control: Questions and AnswersDocument6 paginiBoiler Cycle Control: Questions and AnswersChanBoonChewÎncă nu există evaluări
- Ohmic Heating Process ExplainedDocument37 paginiOhmic Heating Process ExplainedKaran Jethva100% (1)
- Aduqancy PDFDocument1 paginăAduqancy PDF700tyÎncă nu există evaluări
- Double Box1Document2 paginiDouble Box1700tyÎncă nu există evaluări
- Shear Flow ExampleDocument11 paginiShear Flow Example700tyÎncă nu există evaluări
- Shear Flow For Example 20.4Document3 paginiShear Flow For Example 20.4700tyÎncă nu există evaluări
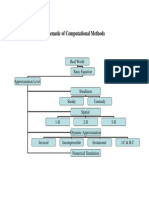
- Schematic of Computational Methods: Real World Basic Equation Approximation Level Steadiness Steady UnsteadyDocument5 paginiSchematic of Computational Methods: Real World Basic Equation Approximation Level Steadiness Steady Unsteady700tyÎncă nu există evaluări
- Engineering Dynamics Problem Set 9Document4 paginiEngineering Dynamics Problem Set 9700tyÎncă nu există evaluări
- 2.003SC Engineering Dynamics Quiz 1Document5 pagini2.003SC Engineering Dynamics Quiz 1700tyÎncă nu există evaluări
- Chapter 1Document41 paginiChapter 1700tyÎncă nu există evaluări
- Schematic of Computational Methods: Real World Basic Equation Approximation Level Steadiness Steady UnsteadyDocument5 paginiSchematic of Computational Methods: Real World Basic Equation Approximation Level Steadiness Steady Unsteady700tyÎncă nu există evaluări
- First Law of ThermodynamicsDocument2 paginiFirst Law of Thermodynamics700tyÎncă nu există evaluări
- Chapter 1Document41 paginiChapter 1700tyÎncă nu există evaluări
- ةرﺪﺼﻤﻟا ﺔﻴﻧﺪﻌﻤﻟاو ﺔﻴﻗرﻮﻟا ﺔﻠﻤﻌﻟا تﺎﺌﻓ Denominations Of Notes And Coins IssuedDocument20 paginiةرﺪﺼﻤﻟا ﺔﻴﻧﺪﻌﻤﻟاو ﺔﻴﻗرﻮﻟا ﺔﻠﻤﻌﻟا تﺎﺌﻓ Denominations Of Notes And Coins Issued700tyÎncă nu există evaluări
- Problems Set AerodynamicsDocument2 paginiProblems Set Aerodynamics700tyÎncă nu există evaluări
- Ae200-Introduction To Aeronautics: Section Subject/ContentsDocument2 paginiAe200-Introduction To Aeronautics: Section Subject/Contents700tyÎncă nu există evaluări
- Aerodynamics I Problems Set 2 Stream Functions & Potential FlowsDocument1 paginăAerodynamics I Problems Set 2 Stream Functions & Potential Flows700tyÎncă nu există evaluări
- Aerodynamics 1 Pr1Document25 paginiAerodynamics 1 Pr1700tyÎncă nu există evaluări
- NSS Chemistry Part 15 Analytical Chemistry (Structural QuestionsDocument42 paginiNSS Chemistry Part 15 Analytical Chemistry (Structural QuestionsKelvinNgÎncă nu există evaluări
- Chaper 2 Definition Classification Force SEDocument8 paginiChaper 2 Definition Classification Force SEMaan Valencia - RevillaÎncă nu există evaluări
- High-Solids Epoxy Systems For Protective and Marine CoatingsDocument6 paginiHigh-Solids Epoxy Systems For Protective and Marine CoatingsJuan Carlos Contreras CherresÎncă nu există evaluări
- Week - 2 - Proyect - 2 - Bgu - Activity 5.telescopesDocument8 paginiWeek - 2 - Proyect - 2 - Bgu - Activity 5.telescopesEunisse Macas Palma100% (1)
- Oxidation States of ManganeseDocument4 paginiOxidation States of ManganesexbokyxÎncă nu există evaluări
- Earth Materials and ProcessesDocument60 paginiEarth Materials and ProcessesZarlene SierraÎncă nu există evaluări
- P131 Problem Set 1Document2 paginiP131 Problem Set 1TyÎncă nu există evaluări
- Sika Rep Fine MSDocument4 paginiSika Rep Fine MSmohghareib80Încă nu există evaluări
- Data XRF ST14Document78 paginiData XRF ST14Achmad Nabil ZulfaqarÎncă nu există evaluări
- T-308 Admixture - Edition 2015Document2 paginiT-308 Admixture - Edition 2015John Kurong100% (1)
- Lecture Notes For CO3 (Part 1) : Forced and Free Convection Heat TransferDocument43 paginiLecture Notes For CO3 (Part 1) : Forced and Free Convection Heat TransferSarindran RamayesÎncă nu există evaluări
- Newtons Laws With Good PicturesDocument30 paginiNewtons Laws With Good PicturesMohammed RiyazuddinÎncă nu există evaluări
- Worksheet # 5 On Forces and MotionDocument1 paginăWorksheet # 5 On Forces and MotionlinlinycÎncă nu există evaluări
- Heat 1Document36 paginiHeat 1ZainabÎncă nu există evaluări
- Discover The Difference Between Glycolysis and Krebs CycleDocument5 paginiDiscover The Difference Between Glycolysis and Krebs Cyclepond_1993Încă nu există evaluări
- Recommendations for Lubricating Oil SelectionDocument7 paginiRecommendations for Lubricating Oil SelectionSergei KurpishÎncă nu există evaluări
- CLS Aipmt-18-19 XII Che Study-Package-7 SET-1 Chapter-14Document6 paginiCLS Aipmt-18-19 XII Che Study-Package-7 SET-1 Chapter-14Sanchit PREDATORÎncă nu există evaluări
- Lesson 4 - Coagulation and FlocculationDocument11 paginiLesson 4 - Coagulation and FlocculationZar ChiÎncă nu există evaluări
- 07 01 2024 JR Super60 NUCLEUS BT Jee Adv2021 P1 CTA 23 Q PaperDocument20 pagini07 01 2024 JR Super60 NUCLEUS BT Jee Adv2021 P1 CTA 23 Q Paperzaid khanÎncă nu există evaluări
- Titration CurveDocument12 paginiTitration Curveoguztop10Încă nu există evaluări
- Set 1Document18 paginiSet 1RON MARK EDWARD ANDALUZÎncă nu există evaluări
- Basf Masterglenium 118 TdsDocument2 paginiBasf Masterglenium 118 TdsFatma IbrahimÎncă nu există evaluări
- Test Specification Table Type of Test: MCQ No of Items: 40 QuestionsDocument5 paginiTest Specification Table Type of Test: MCQ No of Items: 40 QuestionsAhmad ZaidiÎncă nu există evaluări
- RedoxDocument30 paginiRedoxMelanie perez cortezÎncă nu există evaluări
- Fluid Mechanics PDFDocument65 paginiFluid Mechanics PDFSiddharth GargÎncă nu există evaluări