S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Rise and Fall of The Rotor Blade Strain GaugeDocument12 paginiThe Rise and Fall of The Rotor Blade Strain GaugegarystevensozÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- GarabedianDocument7 paginiGarabediangarystevensozÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Rise and Fall of The Rotor Blade Strain GaugeDocument12 paginiThe Rise and Fall of The Rotor Blade Strain GaugegarystevensozÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Dynamic Mode Decomposition Theory and ApplicationsDocument143 paginiDynamic Mode Decomposition Theory and ApplicationsgarystevensozÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Acoustic Models: Numerical Solution TechniquesDocument8 paginiAcoustic Models: Numerical Solution TechniquesgarystevensozÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Thesis Viscous - Inviscid InteractionDocument84 paginiThesis Viscous - Inviscid InteractiongarystevensozÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Acoustic ModelsDocument33 paginiAcoustic ModelsJohn D. HughesÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Nafems Benchmark AerospaceDocument57 paginiNafems Benchmark Aerospacegarystevensoz0% (1)
- Mass Conservation PDFDocument19 paginiMass Conservation PDFgarystevensozÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- PTEC-ICEM CFD 14.5 Tutorial Files PDFDocument326 paginiPTEC-ICEM CFD 14.5 Tutorial Files PDFDragos PastravÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- 2009 Murray Smith DSCDocument143 pagini2009 Murray Smith DSCminhtrieudoddtÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Eijkhout - Intro To HPCDocument482 paginiEijkhout - Intro To HPCgarystevensozÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- A Higher Order Panel Method For Linearised Supersonic FlowDocument257 paginiA Higher Order Panel Method For Linearised Supersonic FlowgarystevensozÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Damping ModelsDocument23 paginiDamping ModelsgarystevensozÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- BLT ReportDocument57 paginiBLT ReportMatt CrisantiÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Missing Mechanical Circuit ElementDocument17 paginiThe Missing Mechanical Circuit ElementgarystevensozÎncă nu există evaluări
- Dissertation RstoffelDocument139 paginiDissertation RstoffelgarystevensozÎncă nu există evaluări
- ZCarwile ETDDocument113 paginiZCarwile ETDgarystevensozÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- FLuid Strucutre InteractionDocument55 paginiFLuid Strucutre InteractiongarystevensozÎncă nu există evaluări
- Development and Implementation of A Flight Test Program For A Geometrically Scaled Joined Wing Sensorcraft Remotely Piloted VehicleDocument258 paginiDevelopment and Implementation of A Flight Test Program For A Geometrically Scaled Joined Wing Sensorcraft Remotely Piloted VehiclegarystevensozÎncă nu există evaluări
- Simple Vibration Problems With MATLAB (And Some Help From MAPLE)Document170 paginiSimple Vibration Problems With MATLAB (And Some Help From MAPLE)megustalazorraÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Atmospheric Gusts ModellingDocument12 paginiAtmospheric Gusts ModellinggarystevensozÎncă nu există evaluări
- Agard Flight Test Technique Series Volume 14 Introduction To Flight Test EngineeringDocument456 paginiAgard Flight Test Technique Series Volume 14 Introduction To Flight Test EngineeringDavid Russo100% (4)
- CFX 13 TutorialDocument0 paginiCFX 13 Tutorialproyectar_ingÎncă nu există evaluări
- Energy Sinks With Nonlinear Stiffness and Nonlinear DampingDocument301 paginiEnergy Sinks With Nonlinear Stiffness and Nonlinear DampinggarystevensozÎncă nu există evaluări
- Solving Laplace EquationDocument42 paginiSolving Laplace Equationgarystevensoz100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Ansys CFX TutorialsDocument788 paginiAnsys CFX TutorialsgarystevensozÎncă nu există evaluări
- System Coupling Users GuideDocument144 paginiSystem Coupling Users GuidegarystevensozÎncă nu există evaluări
- UntitledDocument216 paginiUntitledMONICA SIERRA VICENTEÎncă nu există evaluări
- Building Services Planning Manual-2007Document122 paginiBuilding Services Planning Manual-2007razanmrm90% (10)
- Lesson 3 - ReviewerDocument6 paginiLesson 3 - ReviewerAdrian MarananÎncă nu există evaluări
- Rana2 Compliment As Social StrategyDocument12 paginiRana2 Compliment As Social StrategyRanaÎncă nu există evaluări
- ReadmeDocument2 paginiReadmechethan100% (1)
- WBDocument59 paginiWBsahil.singhÎncă nu există evaluări
- Impact of Pantawid Pamilyang Pilipino Program On EducationDocument10 paginiImpact of Pantawid Pamilyang Pilipino Program On EducationEllyssa Erika MabayagÎncă nu există evaluări
- 2022 WR Extended VersionDocument71 pagini2022 WR Extended Versionpavankawade63Încă nu există evaluări
- Evs ProjectDocument19 paginiEvs ProjectSaloni KariyaÎncă nu există evaluări
- Comparison Between CompetitorsDocument2 paginiComparison Between Competitorsritesh singhÎncă nu există evaluări
- Shakespeare Sonnet EssayDocument3 paginiShakespeare Sonnet Essayapi-5058594660% (1)
- 1 in 8.5 60KG PSC Sleepers TurnoutDocument9 pagini1 in 8.5 60KG PSC Sleepers Turnoutrailway maintenanceÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
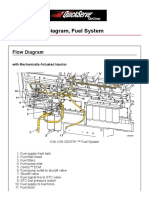
- Cummin C1100 Fuel System Flow DiagramDocument8 paginiCummin C1100 Fuel System Flow DiagramDaniel KrismantoroÎncă nu există evaluări
- Apron CapacityDocument10 paginiApron CapacityMuchammad Ulil AidiÎncă nu există evaluări
- Brand Strategy - in B2BDocument6 paginiBrand Strategy - in B2BKrishan SahuÎncă nu există evaluări
- Latched, Flip-Flops, and TimersDocument36 paginiLatched, Flip-Flops, and TimersMuhammad Umair AslamÎncă nu există evaluări
- LM2576/LM2576HV Series Simple Switcher 3A Step-Down Voltage RegulatorDocument21 paginiLM2576/LM2576HV Series Simple Switcher 3A Step-Down Voltage RegulatorcgmannerheimÎncă nu există evaluări
- Module 2 MANA ECON PDFDocument5 paginiModule 2 MANA ECON PDFMeian De JesusÎncă nu există evaluări
- Pityriasis VersicolorDocument10 paginiPityriasis Versicolorketty putriÎncă nu există evaluări
- Student Exploration: Inclined Plane - Simple MachineDocument9 paginiStudent Exploration: Inclined Plane - Simple MachineLuka MkrtichyanÎncă nu există evaluări
- Produktkatalog SmitsvonkDocument20 paginiProduktkatalog Smitsvonkomar alnasserÎncă nu există evaluări
- Modlist - Modlist 1.4Document145 paginiModlist - Modlist 1.4Tattorin vemariaÎncă nu există evaluări
- Epson Stylus Pro 7900/9900: Printer GuideDocument208 paginiEpson Stylus Pro 7900/9900: Printer GuideJamesÎncă nu există evaluări
- Durex 'S Marketing Strategy in VietnamDocument45 paginiDurex 'S Marketing Strategy in VietnamPham Nguyen KhoiÎncă nu există evaluări
- Fast Track Design and Construction of Bridges in IndiaDocument10 paginiFast Track Design and Construction of Bridges in IndiaSa ReddiÎncă nu există evaluări
- Biography Thesis ExamplesDocument7 paginiBiography Thesis Examplesreneewardowskisterlingheights100% (2)
- Sources of Hindu LawDocument9 paginiSources of Hindu LawKrishnaKousikiÎncă nu există evaluări
- Case Study 2Document5 paginiCase Study 2api-247285537100% (1)
- Winter CrocFest 2017 at St. Augustine Alligator Farm - Final ReportDocument6 paginiWinter CrocFest 2017 at St. Augustine Alligator Farm - Final ReportColette AdamsÎncă nu există evaluări
- Journal of Biology EducationDocument13 paginiJournal of Biology EducationFarah ArrumyÎncă nu există evaluări