S-ar putea să vă placă și
- Generalidades de Terminacions de Cable de SuministroDocument1 paginăGeneralidades de Terminacions de Cable de SuministroHumbertoYepezHÎncă nu există evaluări
- Distancias de Seguridad Entre Las Instalaciones de Suministro y Comunicaciones en BuzonesDocument1 paginăDistancias de Seguridad Entre Las Instalaciones de Suministro y Comunicaciones en BuzonesHumbertoYepezHÎncă nu există evaluări
- Tuberias de Proteccion para Subidas de Cables SubterraneosDocument1 paginăTuberias de Proteccion para Subidas de Cables SubterraneosHumbertoYepezHÎncă nu există evaluări
- Disposicion de InterruptoresDocument1 paginăDisposicion de InterruptoresHumbertoYepezHÎncă nu există evaluări
- Cable Directamente Enterrado CNEDocument1 paginăCable Directamente Enterrado CNEHumbertoYepezHÎncă nu există evaluări
- Cable Estructuras Subterraneas GeneralidadesDocument1 paginăCable Estructuras Subterraneas GeneralidadesHumbertoYepezHÎncă nu există evaluări
- Crucetas y RiostrasDocument1 paginăCrucetas y RiostrasHumbertoYepezHÎncă nu există evaluări
- Practica de ElectroquimicaDocument4 paginiPractica de ElectroquimicaHumbertoYepezHÎncă nu există evaluări
- Distancia Seguridad Vertical Entre AlambresDocument1 paginăDistancia Seguridad Vertical Entre AlambresHumbertoYepezH100% (1)
- Reporte MecanicaDocument1 paginăReporte MecanicaHumbertoYepezHÎncă nu există evaluări
- Taller 1er Examen QuimicaDocument4 paginiTaller 1er Examen QuimicaHumbertoYepezHÎncă nu există evaluări
- Espacios de SuminIstro ComunicacionDocument1 paginăEspacios de SuminIstro ComunicacionHumbertoYepezHÎncă nu există evaluări
- Reglas Seguridad para Instalacion y Matenimiento de Lineas de SuministroDocument1 paginăReglas Seguridad para Instalacion y Matenimiento de Lineas de SuministroHumbertoYepezHÎncă nu există evaluări
- Distancias Seguridad Horizontales en MetrosDocument1 paginăDistancias Seguridad Horizontales en MetrosHumbertoYepezHÎncă nu există evaluări
- Ensayo Vacio GeneradorDocument1 paginăEnsayo Vacio GeneradorHumbertoYepezHÎncă nu există evaluări
- Niveles Voltaje Suminsitro 2011Document1 paginăNiveles Voltaje Suminsitro 2011HumbertoYepezHÎncă nu există evaluări
- Distancias Seguridad Lineas Electricas MTDocument1 paginăDistancias Seguridad Lineas Electricas MTHumbertoYepezHÎncă nu există evaluări
- Carga Debida Al VientoDocument1 paginăCarga Debida Al VientoHumbertoYepezHÎncă nu există evaluări
- Anchos Minimas de Fajas de ServidumbresDocument1 paginăAnchos Minimas de Fajas de ServidumbresHumbertoYepezHÎncă nu există evaluări
- Curva Vacio GeneradorDocument1 paginăCurva Vacio GeneradorHumbertoYepezHÎncă nu există evaluări
- Desconexion y Reconexion de CargaDocument1 paginăDesconexion y Reconexion de CargaHumbertoYepezHÎncă nu există evaluări
- Solvers MatlabDocument1 paginăSolvers MatlabHumbertoYepezHÎncă nu există evaluări
- Pruebas y CertificacionDocument1 paginăPruebas y CertificacionHumbertoYepezHÎncă nu există evaluări
- El Costumbrismo AmericanoIlustrado El Caso PeruanoDocument1 paginăEl Costumbrismo AmericanoIlustrado El Caso PeruanoHumbertoYepezHÎncă nu există evaluări
- Solicito PracticasDocument1 paginăSolicito PracticasHumbertoYepezHÎncă nu există evaluări
- Cambio de MedidorDocument1 paginăCambio de MedidorHumbertoYepezHÎncă nu există evaluări
- Pautas MantenimientoDocument2 paginiPautas MantenimientoHumbertoYepezHÎncă nu există evaluări
- El Gran Cronista Del Imperio IncaDocument14 paginiEl Gran Cronista Del Imperio IncaJose DzÎncă nu există evaluări
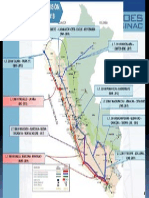
- Sistemas de Transmision ProyectosDocument1 paginăSistemas de Transmision ProyectosHumbertoYepezHÎncă nu există evaluări
- Cobertura de La Curva de Carga para Diferentes TecnologiasDocument1 paginăCobertura de La Curva de Carga para Diferentes TecnologiasHumbertoYepezHÎncă nu există evaluări
- Los AcrósticosDocument22 paginiLos AcrósticosUlla Greta Delgadillo OlavarríaÎncă nu există evaluări
- 11.2 Demanda Fijacion Cuota Alimentos Maria Fernanda Barrios OspinaDocument3 pagini11.2 Demanda Fijacion Cuota Alimentos Maria Fernanda Barrios OspinaDiego ArevaloÎncă nu există evaluări
- Eslava Record AcademicoDocument2 paginiEslava Record AcademicoDanny EslavaÎncă nu există evaluări
- Controles en El Plan Estrategico de MarketingDocument3 paginiControles en El Plan Estrategico de MarketingDani Mazo LlanoÎncă nu există evaluări
- Ensayo Otoniel GranadosDocument1 paginăEnsayo Otoniel GranadosMarianela MasyRubiÎncă nu există evaluări
- CREMAS PRACTICA 13 FinalDocument13 paginiCREMAS PRACTICA 13 Finalantony1falconÎncă nu există evaluări
- Guía de Diseño de ReservorioDocument59 paginiGuía de Diseño de ReservorioDiego SanchezÎncă nu există evaluări
- Ciencia Formal y Ciencia FácticaDocument3 paginiCiencia Formal y Ciencia FácticaJulia20122015Încă nu există evaluări
- Pediatría Exámenes Fase IIDocument38 paginiPediatría Exámenes Fase IIGrace GarcíaÎncă nu există evaluări
- Por La Cual Se Anula La Asamblea Municipal de Colombia Humana de Ocaña-Norte de Santander y Se Ordena La Realización de Una Nueva AsambleaDocument9 paginiPor La Cual Se Anula La Asamblea Municipal de Colombia Humana de Ocaña-Norte de Santander y Se Ordena La Realización de Una Nueva AsambleaMayerly Paola Jácome ÁlvarezÎncă nu există evaluări
- El Performer - GrotowskiDocument5 paginiEl Performer - GrotowskiMary MoreiraÎncă nu există evaluări
- Guía de Actividades y Rúbrica de Evaluación - Unidad 1 - Paso 1 - Conceptualización Sobre Arquitectura EmpresarialDocument9 paginiGuía de Actividades y Rúbrica de Evaluación - Unidad 1 - Paso 1 - Conceptualización Sobre Arquitectura EmpresarialMarlon MontaguthÎncă nu există evaluări
- Seguimiento Del 27 Al 31 JulioDocument66 paginiSeguimiento Del 27 Al 31 JulioRocio TabordaÎncă nu există evaluări
- Instituto Politécnico Nacional Secretaría Académica Dirección de Educación Media SuperiorDocument5 paginiInstituto Politécnico Nacional Secretaría Académica Dirección de Educación Media SuperiorLuis Carlos ValverdeÎncă nu există evaluări
- Los Descendientes de La Reina Victoria y El Principe AlbertoDocument70 paginiLos Descendientes de La Reina Victoria y El Principe AlbertoLolibet GonzálezÎncă nu există evaluări
- Las 100 Mejores Películas Del SigloDocument10 paginiLas 100 Mejores Películas Del SigloPedroGutierezSaenzÎncă nu există evaluări
- Triptico de SkkinerDocument2 paginiTriptico de SkkinerDaniel MendozaÎncă nu există evaluări
- Mapa Conceptual Actividad 1Document2 paginiMapa Conceptual Actividad 1reneÎncă nu există evaluări
- Las EnzimasDocument12 paginiLas Enzimaslissaird5Încă nu există evaluări
- Tigo Avanzado-1Document5 paginiTigo Avanzado-1MARIO FERNANDO VALLEJO REVELOÎncă nu există evaluări
- CRANEOSINOSTOSISDocument22 paginiCRANEOSINOSTOSISAlgert ContrerasÎncă nu există evaluări
- Preguntas B%c3%a1sicas Sobre El IRAGRO-IVA Relacionadas A La Agricultura FamiliarDocument2 paginiPreguntas B%c3%a1sicas Sobre El IRAGRO-IVA Relacionadas A La Agricultura FamiliarPedro MarecosÎncă nu există evaluări
- Similitudes en Los Evangelios SinopticosDocument2 paginiSimilitudes en Los Evangelios Sinopticosruth beltran chiirivi100% (5)
- Proceso Administrativo de Plaza VeaDocument10 paginiProceso Administrativo de Plaza VeaAmilcar Christian Ccoa50% (2)
- Sistemas de EcuacionesDocument8 paginiSistemas de EcuacionesPedro BelloÎncă nu există evaluări
- Caso AdidasDocument30 paginiCaso Adidasalexcamala156% (16)
- Examen 1Document66 paginiExamen 1Alejandro Restrepo SanchezÎncă nu există evaluări
- Glosario de InglesDocument4 paginiGlosario de InglesJasmin Peña GonzalesÎncă nu există evaluări
- Creaciones Artísticas de Los Pueblos A Través de La HistoriaDocument6 paginiCreaciones Artísticas de Los Pueblos A Través de La HistoriaAnny AndreaÎncă nu există evaluări
- Trabajo PsiquiatríaDocument5 paginiTrabajo PsiquiatríaAnildibeth0% (1)