S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Qinsy Database Setup - QinsyDocument24 paginiQinsy Database Setup - QinsyMohammed Hassan100% (3)
- Piezoelectric BrochureDocument22 paginiPiezoelectric BrochureYi LiuÎncă nu există evaluări
- Cold Water CoralsDocument351 paginiCold Water Coralslepoete4075% (4)
- Mars One Feasibility AnalysisDocument35 paginiMars One Feasibility Analysisboga358Încă nu există evaluări
- Accident Recovery Study 3Document5 paginiAccident Recovery Study 3boga358Încă nu există evaluări
- Accident Recovery Study 2Document4 paginiAccident Recovery Study 2boga358Încă nu există evaluări
- Accident Recovery Study 1Document8 paginiAccident Recovery Study 1boga358Încă nu există evaluări
- Whiplash Statistical StudyDocument7 paginiWhiplash Statistical Studyboga358Încă nu există evaluări
- SymbolsDocument2 paginiSymbolsSiva RamÎncă nu există evaluări
- Ten Comandments of MultibeamDocument28 paginiTen Comandments of Multibeamboga358Încă nu există evaluări
- 870-K543 World AUV Market Forecast 2014-2018 LEAFLETDocument2 pagini870-K543 World AUV Market Forecast 2014-2018 LEAFLETboga358Încă nu există evaluări
- Processing and Analysis of Simrad Multibeam Sonar DataDocument11 paginiProcessing and Analysis of Simrad Multibeam Sonar DataJohn KaruwalÎncă nu există evaluări
- Teledyne Reson Seabat 7101 Multibeam Echo SounderDocument2 paginiTeledyne Reson Seabat 7101 Multibeam Echo SounderTrầnHữuHòaÎncă nu există evaluări
- 6 Configuring F180Document7 pagini6 Configuring F180yohanÎncă nu există evaluări
- 2018 Hysweep Interfacing PDFDocument93 pagini2018 Hysweep Interfacing PDFRaka AnandaÎncă nu există evaluări
- Geoswath 4R: Next Generation Wide Swath Bathymetry and Side ScanDocument2 paginiGeoswath 4R: Next Generation Wide Swath Bathymetry and Side ScanJuan Vicente Font CininiÎncă nu există evaluări
- GSI - Baseline Geoscience Data GenerationDocument2 paginiGSI - Baseline Geoscience Data GenerationPraveen KumarÎncă nu există evaluări
- Data Sheet KongsbergDocument53 paginiData Sheet KongsbergSimone BaptistaÎncă nu există evaluări
- NOAA-Hydro Division Field Procedure Manua-L2014Document635 paginiNOAA-Hydro Division Field Procedure Manua-L2014Jimmy LeeÎncă nu există evaluări
- Gemini 620pd: Multibeam Profiling SonarDocument2 paginiGemini 620pd: Multibeam Profiling SonarAntony Jacob AshishÎncă nu există evaluări
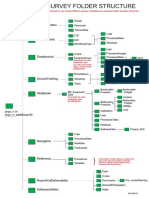
- BGS Survey Folder StructureDocument6 paginiBGS Survey Folder Structureeplan drawingsÎncă nu există evaluări
- Seawasp: A Small Waterplane Area Twin Hull Autonomous Platform For Shallow Water MappingDocument7 paginiSeawasp: A Small Waterplane Area Twin Hull Autonomous Platform For Shallow Water MappingGlmÎncă nu există evaluări
- Geog482-Williamss p3Document13 paginiGeog482-Williamss p3api-276783092Încă nu există evaluări
- Installation Manual: Multibeam Echo SounderDocument154 paginiInstallation Manual: Multibeam Echo SounderEvgeny YudinÎncă nu există evaluări
- Do I Need A 1PPS Box For My Mulitbeam SystemDocument3 paginiDo I Need A 1PPS Box For My Mulitbeam SystemutkuÎncă nu există evaluări
- 2023-001 FMGT BS Pop Rev01Document32 pagini2023-001 FMGT BS Pop Rev01Fernando DuarteÎncă nu există evaluări
- TX-OP-PD-001 2020-005 Qimera MBES POP REV04-2Document64 paginiTX-OP-PD-001 2020-005 Qimera MBES POP REV04-2Fernando DuarteÎncă nu există evaluări
- Teledyne Reson SeaBat 7125 Multibeam EchosounderDocument4 paginiTeledyne Reson SeaBat 7125 Multibeam EchosounderNguyen Ngoc Huy DoÎncă nu există evaluări
- GeoSwath Plus BrochureDocument16 paginiGeoSwath Plus BrochureAhmad Afandi100% (1)
- Seabat T50-R: Ultrahigh Resolution Multibeam Echosounder With Fully Integrated Inertial Navigation SystemDocument2 paginiSeabat T50-R: Ultrahigh Resolution Multibeam Echosounder With Fully Integrated Inertial Navigation SystemvaljosÎncă nu există evaluări
- 6205 Bathymetry & Side Scan System: User Hardware ManualDocument99 pagini6205 Bathymetry & Side Scan System: User Hardware ManualAndzar Muhammad FauziÎncă nu există evaluări
- 2024 V - US Online 04.23Document2 pagini2024 V - US Online 04.23Nguyen Ngoc Huy DoÎncă nu există evaluări
- Poseidon Ea 303: NeptuneDocument2 paginiPoseidon Ea 303: Neptuneingvar1245Încă nu există evaluări
- Multibeam and ProfilerDocument162 paginiMultibeam and ProfileralsnobÎncă nu există evaluări
- Teledyne Odom MB2 Product LeafletDocument2 paginiTeledyne Odom MB2 Product LeafletBalai Rawa2020Încă nu există evaluări
- SUG614-Chapter 2 - Sounding PDFDocument106 paginiSUG614-Chapter 2 - Sounding PDFFarisa ZulkifliÎncă nu există evaluări
- MS For Survey Works (Draft) R6Document44 paginiMS For Survey Works (Draft) R6Tegar Pilar RamadhanÎncă nu există evaluări
- The Development of The Multibeam EchosounderDocument2 paginiThe Development of The Multibeam EchosounderKim Kiki ZaenuriÎncă nu există evaluări
- The Effect of Sound Velocity Errors On Multi-Beam Sonar Depth AccuracyDocument10 paginiThe Effect of Sound Velocity Errors On Multi-Beam Sonar Depth AccuracyvesmsxÎncă nu există evaluări