S-ar putea să vă placă și
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De la EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Încă nu există evaluări
- Puesta en marcha de sistemas de automatización industrial. ELEM0311De la EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Evaluare: 3 din 5 stele3/5 (1)
- Tecnología para Reciclar Tecnología - Un Plotter EcológicoDocument13 paginiTecnología para Reciclar Tecnología - Un Plotter EcológicoTatiana ArturiÎncă nu există evaluări
- Grua Posicionadora X y ZDocument4 paginiGrua Posicionadora X y ZEmanuel CortesÎncă nu există evaluări
- Fase 2 CNC AporteDocument7 paginiFase 2 CNC AporteHarold Favian Diaz LeonisÎncă nu există evaluări
- Creacion de Prototipo de Maquina CNCDocument6 paginiCreacion de Prototipo de Maquina CNCCesar Gabriel Chunga LadinesÎncă nu există evaluări
- Informe Grupo 8Document9 paginiInforme Grupo 8Milton FernandezÎncă nu există evaluări
- Proyecto Maquina CNCDocument27 paginiProyecto Maquina CNCElkin Javier RodriguezÎncă nu există evaluări
- Manual de Operacion CNCDocument11 paginiManual de Operacion CNCDemian Venegas SalgadoÎncă nu există evaluări
- Programacion Fanuc SimulacionDocument0 paginiProgramacion Fanuc SimulacionJuan Pablo Lòpez RubìÎncă nu există evaluări
- Control de PAP y CNCDocument2 paginiControl de PAP y CNCWilmar WilsonÎncă nu există evaluări
- Resumen de ManufacturaDocument20 paginiResumen de Manufacturajrg07120Încă nu există evaluări
- Tecnológico Nacional de México Instituto Tecnológico Superior de Poza Rica Ingeniería MecatrónicaDocument5 paginiTecnológico Nacional de México Instituto Tecnológico Superior de Poza Rica Ingeniería MecatrónicaMatías MillanÎncă nu există evaluări
- Grupo 5 243008 CNCDocument19 paginiGrupo 5 243008 CNCHarold Favian Diaz LeonisÎncă nu există evaluări
- Apuntes Control NuméricoDocument13 paginiApuntes Control NuméricoatarijaguarÎncă nu există evaluări
- Cesar Ibata Fase 1Document8 paginiCesar Ibata Fase 1jhonestebanpenagosÎncă nu există evaluări
- CNC DNC 2Document7 paginiCNC DNC 2Adalberto Vega ContrerasÎncă nu există evaluări
- Proy - Final Informe - Alvarez - Condorvilca - VilcaDocument17 paginiProy - Final Informe - Alvarez - Condorvilca - VilcaROBEL LIZANDRO VILCA QUISPEÎncă nu există evaluări
- Laboratorio de Sistemas Electronicos - Modelo Fundamental Brazo RoboticoDocument7 paginiLaboratorio de Sistemas Electronicos - Modelo Fundamental Brazo RoboticoallgamerÎncă nu există evaluări
- Automatizacion de Un Torno Paralelo Con Control Basado en PCDocument29 paginiAutomatizacion de Un Torno Paralelo Con Control Basado en PCJesus SerranoÎncă nu există evaluări
- E06 Control Numerico Directo DNCDocument7 paginiE06 Control Numerico Directo DNCDenis CruxÎncă nu există evaluări
- Actividad 1 - Anfred Cuenca LeivaDocument10 paginiActividad 1 - Anfred Cuenca LeivaAnfred Angelis Cuenca leivaÎncă nu există evaluări
- Ting Escyt 2019 LNJ-V1Document193 paginiTing Escyt 2019 LNJ-V1mandujanorÎncă nu există evaluări
- Universidad Politécnica de Tecámac: Docente: Israel Flores BáezDocument7 paginiUniversidad Politécnica de Tecámac: Docente: Israel Flores BáezAngel MendozaÎncă nu există evaluări
- Guía Grupal - Unidad 2Document12 paginiGuía Grupal - Unidad 2JONATHAN ALEXIS GUANOTASIG CHICAIZAÎncă nu există evaluări
- Investigación E Innovación Tecnológica: Informe: CNC de MaderaDocument29 paginiInvestigación E Innovación Tecnológica: Informe: CNC de MaderaYonatan Cristian Pacho Alvarez100% (1)
- Máquina Dispensadora de Snacks, Con Un Control Sincrónico Basado en Software LibreDocument14 paginiMáquina Dispensadora de Snacks, Con Un Control Sincrónico Basado en Software LibreRawi Montilla100% (1)
- CUERPODocument100 paginiCUERPOAbner I Choquevilca ChÎncă nu există evaluări
- Informe 3-Cnc-Mecanizado Con Códigos GDocument10 paginiInforme 3-Cnc-Mecanizado Con Códigos GEddison NuñezÎncă nu există evaluări
- Taller Numero 7 MAQUINA CNCDocument21 paginiTaller Numero 7 MAQUINA CNCDylan Fabrizio SierraÎncă nu există evaluări
- Manufactura AvanzadaDocument16 paginiManufactura Avanzadaedgar100% (1)
- Diseño y Construccion de Una Maquina CNC para La Obtencion de Objetos Solidos A Partir de Un Diseño Asistido Por ComputadoraDocument14 paginiDiseño y Construccion de Una Maquina CNC para La Obtencion de Objetos Solidos A Partir de Un Diseño Asistido Por ComputadoraArtur RoÎncă nu există evaluări
- Tello MegoDocument4 paginiTello MegokarinaÎncă nu există evaluări
- Diseño e Implementación de Una Máquina CNC para La Fabricación de Placas de Circuito Impreso para Componentes SMDDocument18 paginiDiseño e Implementación de Una Máquina CNC para La Fabricación de Placas de Circuito Impreso para Componentes SMDNellÎncă nu există evaluări
- Propuesta de Proyecto Final PotenciaDocument4 paginiPropuesta de Proyecto Final PotenciaGiordano Brito RodriguezÎncă nu există evaluări
- Exposicion Eq3Document10 paginiExposicion Eq3alex tuzÎncă nu există evaluări
- Maquinas ProgramablesDocument18 paginiMaquinas ProgramablesEduardo Lezama BurgaÎncă nu există evaluări
- Operación y Programación de Maquinas CNCDocument101 paginiOperación y Programación de Maquinas CNCRaul Daniel Rodriguez TenorioÎncă nu există evaluări
- CNC2Document10 paginiCNC2laraluz123080308Încă nu există evaluări
- Aplicaciones CadcamDocument5 paginiAplicaciones CadcamDiego SPÎncă nu există evaluări
- Práctica PLC NO.2Document85 paginiPráctica PLC NO.2Daniel Barón ArgüellesÎncă nu există evaluări
- Arqui Informe Final CNC 2018BDocument20 paginiArqui Informe Final CNC 2018BEnrique Huayra SumariaÎncă nu există evaluări
- Control Motor DC Por PWM y Puerto Serial-Proyecto Electrónica IDocument12 paginiControl Motor DC Por PWM y Puerto Serial-Proyecto Electrónica ITazann24Încă nu există evaluări
- Informe de ProtesisDocument19 paginiInforme de ProtesisWalter Wlady HernándezÎncă nu există evaluări
- ProhibidoDocument47 paginiProhibidoYonatan Cristian Pacho AlvarezÎncă nu există evaluări
- Electronica 2 Semana 6Document4 paginiElectronica 2 Semana 6Carlos PobleteÎncă nu există evaluări
- TESIS Diseno Programacion Simulacion Fabricacion CNC PDFDocument225 paginiTESIS Diseno Programacion Simulacion Fabricacion CNC PDFGranja De Conejos Los Pepés100% (1)
- Diseno Programacion Simulacion Fabricacion CNC CON MASTERCAM X9Document225 paginiDiseno Programacion Simulacion Fabricacion CNC CON MASTERCAM X9Alberto Luna0% (1)
- SMED en Centros de Mecanizado Horizontal y Vertical - 2 DesaDocument35 paginiSMED en Centros de Mecanizado Horizontal y Vertical - 2 DesaCJ PerezÎncă nu există evaluări
- CD 2253Document257 paginiCD 2253Miguel JerezÎncă nu există evaluări
- Iniciacion CNC PDFDocument7 paginiIniciacion CNC PDFAgata Fernandez GarciaÎncă nu există evaluări
- 1.1 Antecedentes HistóricosDocument4 pagini1.1 Antecedentes Históricos[TcA]PelyÎncă nu există evaluări
- Tarea 2 - Identificar Conceptos Básicos Del CNC y Comparar Máquinas HerramientaDocument8 paginiTarea 2 - Identificar Conceptos Básicos Del CNC y Comparar Máquinas HerramientaCristianCamiloÎncă nu există evaluări
- Temario de Curso CNCDocument139 paginiTemario de Curso CNCAntonio Romero67% (3)
- Formacion Especifica Tarea ISE6 2 1Document38 paginiFormacion Especifica Tarea ISE6 2 1Juan MaribilÎncă nu există evaluări
- Graficadora CNCDocument56 paginiGraficadora CNCJose Gonzalez0% (1)
- Multimetro Digital Con Pic 16F877A - Libros, Simuladores, Tutoriales Y Mucho MásDocument9 paginiMultimetro Digital Con Pic 16F877A - Libros, Simuladores, Tutoriales Y Mucho MásArmando Campos SalazarÎncă nu există evaluări
- Elaboración de programas de CNC para la fabricación de piezas por corte y conformado. FMEH0209De la EverandElaboración de programas de CNC para la fabricación de piezas por corte y conformado. FMEH0209Încă nu există evaluări
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe la EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalEvaluare: 5 din 5 stele5/5 (4)
- Reparación de instalaciones automatizadas. ELEE0109De la EverandReparación de instalaciones automatizadas. ELEE0109Încă nu există evaluări
- SILABO INGLES PARA LA COMPRENSION Y REDACCION - PRODUCCION AGROPECUARIA 3 AB - PROF R MONTOYA SignedDocument2 paginiSILABO INGLES PARA LA COMPRENSION Y REDACCION - PRODUCCION AGROPECUARIA 3 AB - PROF R MONTOYA SignedJonathan Mendoza100% (1)
- Personalidad y AutoestimaDocument3 paginiPersonalidad y AutoestimaJonathan MendozaÎncă nu există evaluări
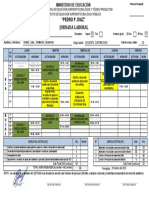
- Parte Diario de Clases de Actividad Lectiva 2023-I Del Iestp "Pedro P. Díaz"Document1 paginăParte Diario de Clases de Actividad Lectiva 2023-I Del Iestp "Pedro P. Díaz"Jonathan MendozaÎncă nu există evaluări
- SolicitudDocument8 paginiSolicitudJonathan MendozaÎncă nu există evaluări
- UntitledDocument1 paginăUntitledJonathan MendozaÎncă nu există evaluări
- Anexo 3 - Declaracion Jurada de ServiciosDocument2 paginiAnexo 3 - Declaracion Jurada de ServiciosJonathan MendozaÎncă nu există evaluări
- Ficha de Actividades 03 ContabilidadDocument2 paginiFicha de Actividades 03 ContabilidadJonathan MendozaÎncă nu există evaluări
- Silabo Ingles - Comunicacional Electronica IndustrialDocument2 paginiSilabo Ingles - Comunicacional Electronica IndustrialJonathan MendozaÎncă nu există evaluări
- Silabo - Comunicacion OralDocument4 paginiSilabo - Comunicacion OralJonathan MendozaÎncă nu există evaluări
- Silabo Cultura, Física y DeportivaDocument3 paginiSilabo Cultura, Física y DeportivaJonathan MendozaÎncă nu există evaluări
- Silabo Ingles ComunicacionalDocument5 paginiSilabo Ingles ComunicacionalJonathan MendozaÎncă nu există evaluări
- Temas2doExamenArq Comp2015ADocument1 paginăTemas2doExamenArq Comp2015ADaniels QcÎncă nu există evaluări
- Sílabo - 2023 MATERIALES ESTRUCTURALES PARA CONSTRUCCIONDocument3 paginiSílabo - 2023 MATERIALES ESTRUCTURALES PARA CONSTRUCCIONJonathan MendozaÎncă nu există evaluări
- PE - Electrónica Industrial 2021Document12 paginiPE - Electrónica Industrial 2021Jonathan MendozaÎncă nu există evaluări
- Seminario de Tesis - 8,9Document7 paginiSeminario de Tesis - 8,9Jonathan MendozaÎncă nu există evaluări
- 003 Jornada Laboral COSTOS Y PRESUPUESTOS DE POBRA 2023-1Document1 pagină003 Jornada Laboral COSTOS Y PRESUPUESTOS DE POBRA 2023-1Jonathan MendozaÎncă nu există evaluări
- Ficha de Actividades 02 ContabilidadDocument2 paginiFicha de Actividades 02 ContabilidadJonathan MendozaÎncă nu există evaluări
- Informe - ModeloDocument29 paginiInforme - ModeloJonathan MendozaÎncă nu există evaluări
- Requisitos Del Proceso de SelecciónDocument2 paginiRequisitos Del Proceso de SelecciónLuis Alberto Huancollo CoaquiraÎncă nu există evaluări
- PCGrifoEESS - Version01Document14 paginiPCGrifoEESS - Version01Carlos Remar CastillonÎncă nu există evaluări
- Comercio Electrónico en El PerúDocument18 paginiComercio Electrónico en El PerúJonathan MendozaÎncă nu există evaluări
- Avance de Diseño2015ADocument12 paginiAvance de Diseño2015AJonathan MendozaÎncă nu există evaluări
- Diseño y Simulación de La Etapa de Potencia y Control para Un Seguidor SolarDocument6 paginiDiseño y Simulación de La Etapa de Potencia y Control para Un Seguidor Solarritomontoya410Încă nu există evaluări
- Formato AtsDocument8 paginiFormato AtsDaniela Patiño ValdesÎncă nu există evaluări
- Tele MedicinaDocument9 paginiTele MedicinaJonathan MendozaÎncă nu există evaluări
- Informe de EogDocument20 paginiInforme de EogJonathan MendozaÎncă nu există evaluări
- Aluminio PFKDocument104 paginiAluminio PFKDarío Muñoz75% (4)
- Instalaciones de Fibra ÓpticaDocument89 paginiInstalaciones de Fibra ÓpticaJonathan Mendoza100% (6)
- Principio de FuncionamientoDocument3 paginiPrincipio de FuncionamientoJonathan MendozaÎncă nu există evaluări
- El Diodo SemiconductorDocument19 paginiEl Diodo SemiconductorMaria Lucia Ospina SepulvedaÎncă nu există evaluări
- Instalaciones Eléctricas Domiciliarias - InACAPDocument146 paginiInstalaciones Eléctricas Domiciliarias - InACAPabarzua_rodrigo67% (3)
- Compresor de Tornillo Helicoidal 1Document11 paginiCompresor de Tornillo Helicoidal 1Héctor Hugo MoyaÎncă nu există evaluări
- Filt RosDocument5 paginiFilt Rossteeven armasÎncă nu există evaluări
- Iei06 Tarea2Document12 paginiIei06 Tarea2miuv0% (1)
- Guia 1 de DispositivosDocument6 paginiGuia 1 de DispositivosGrecia Shina Lovón ChisllaÎncă nu există evaluări
- CIP LISTADO DE ASOCIADOS Setiembre 2015 PDFDocument27 paginiCIP LISTADO DE ASOCIADOS Setiembre 2015 PDFJuan Carlos RubioÎncă nu există evaluări
- Intel Pentium4Document2 paginiIntel Pentium4Claudia TorresÎncă nu există evaluări
- 12 Alarma de TemperaturaDocument2 pagini12 Alarma de TemperaturaRicardo TapiaÎncă nu există evaluări
- Unidad 3 MetoDoS ElectricosDocument43 paginiUnidad 3 MetoDoS ElectricosYeraldi Montiel Alor67% (6)
- Controles TotalControl TOT HAFTEN VentDepotDocument3 paginiControles TotalControl TOT HAFTEN VentDepotSantiago ChucÎncă nu există evaluări
- Preparatorio 1.1Document4 paginiPreparatorio 1.1Eve AndyÎncă nu există evaluări
- Aspiradora TH 1410Document10 paginiAspiradora TH 1410Ana Maria Soto AcevedoÎncă nu există evaluări
- AtariDocument8 paginiAtariLinoberth GonzalezÎncă nu există evaluări
- LAB8-Codificadores y DecodificadoresDocument7 paginiLAB8-Codificadores y DecodificadoresIvonne Leiva RodriguezÎncă nu există evaluări
- Actividad 1Document16 paginiActividad 1Omar MedinaÎncă nu există evaluări
- LTH EspecialesDocument1 paginăLTH EspecialesEduardo RiveraÎncă nu există evaluări
- Tutorial LatexDocument10 paginiTutorial Latexlunatic0Încă nu există evaluări
- La Estación Total Es Un Instrumento Topográfico de Última GeneraciónDocument10 paginiLa Estación Total Es Un Instrumento Topográfico de Última GeneraciónDaniel FernandezÎncă nu există evaluări
- Reporte Temporizador DigitalDocument5 paginiReporte Temporizador DigitalRafael Martinez BarraganÎncă nu există evaluări
- Curso Rápido UP 870 OronaDocument6 paginiCurso Rápido UP 870 OronajoseÎncă nu există evaluări
- Informe de Lufussa 46Document37 paginiInforme de Lufussa 46Ismary EspinalÎncă nu există evaluări
- CacelDocument3 paginiCaceltecnoscar1972Încă nu există evaluări
- Laboratorio de Fisica 3Document20 paginiLaboratorio de Fisica 3Daro Apme75% (12)
- Hvac Loc. AveriasDocument69 paginiHvac Loc. AveriasPablo RodriguezÎncă nu există evaluări
- Definicion de Lineas de Transmision y Distribucion PDFDocument2 paginiDefinicion de Lineas de Transmision y Distribucion PDFAndrea Soto100% (1)
- Amplificador Emisor ComúnDocument1 paginăAmplificador Emisor ComúnHernan GarciaÎncă nu există evaluări
- Lab 4Document8 paginiLab 4Franklin Daniel Carbajal OsisÎncă nu există evaluări