S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hashemi2013 PDFDocument10 paginiHashemi2013 PDFFABIANCHO2210Încă nu există evaluări
- 2018 Bookmatter AdvancedSmartGridFunctionalitiDocument13 pagini2018 Bookmatter AdvancedSmartGridFunctionalitiFABIANCHO2210Încă nu există evaluări
- F.R.E.E Algebra 2, Student Edition (Merrill Algebra 2) PDFDocument3 paginiF.R.E.E Algebra 2, Student Edition (Merrill Algebra 2) PDFFabian Zamora0% (1)
- A Review of Recent Advances in Economic Dispatch 1990 PDFDocument12 paginiA Review of Recent Advances in Economic Dispatch 1990 PDFSheri Abhishek ReddyÎncă nu există evaluări
- Appendix-I: Bus Data For Ieee-14 Bus SystemDocument13 paginiAppendix-I: Bus Data For Ieee-14 Bus SystemSwaroop Kumar NallagalvaÎncă nu există evaluări
- Ieee 14 Bus Technical NoteDocument6 paginiIeee 14 Bus Technical NoteStefania OliveiraÎncă nu există evaluări
- Microgrid Modeling and Grid Interconnection StudiesDocument71 paginiMicrogrid Modeling and Grid Interconnection StudiesNayan MannaÎncă nu există evaluări
- Characterizing and Correcting For The Effect of Sensor Noise in The Dynamic Mode DecompositionDocument25 paginiCharacterizing and Correcting For The Effect of Sensor Noise in The Dynamic Mode DecompositionFABIANCHO2210Încă nu există evaluări
- Short Circuit Current Estimation Using PMU Measurements During Normal Load VariationDocument5 paginiShort Circuit Current Estimation Using PMU Measurements During Normal Load VariationFABIANCHO2210Încă nu există evaluări
- PDFDocument6 paginiPDFFABIANCHO2210Încă nu există evaluări
- 1737 6954 1 PB PDFDocument12 pagini1737 6954 1 PB PDFFABIANCHO2210Încă nu există evaluări
- 6041 FilteringProtective WebDocument26 pagini6041 FilteringProtective WebFABIANCHO2210Încă nu există evaluări
- Applications of The Dynamic Mode DecompositionDocument11 paginiApplications of The Dynamic Mode DecompositionFABIANCHO2210Încă nu există evaluări
- 04 2008 JA PS A 1 009 Clean PDFDocument6 pagini04 2008 JA PS A 1 009 Clean PDFFABIANCHO2210Încă nu există evaluări
- Thuc Kjetil GNTDocument6 paginiThuc Kjetil GNTFABIANCHO2210Încă nu există evaluări
- Metodo NuevoDocument14 paginiMetodo NuevoFABIANCHO2210Încă nu există evaluări
- 3 RealTimeTheveninComputations PDFDocument6 pagini3 RealTimeTheveninComputations PDFFABIANCHO2210Încă nu există evaluări
- A Resistance Sign-Based Method ForDocument8 paginiA Resistance Sign-Based Method ForFABIANCHO2210Încă nu există evaluări
- Gauss NewtonDocument17 paginiGauss NewtonDenis SaricÎncă nu există evaluări
- Distribution FeederDocument88 paginiDistribution FeederFABIANCHO2210Încă nu există evaluări
- 18 WappendixDocument20 pagini18 WappendixDrManohar SinghÎncă nu există evaluări
- A Resistance Sign-Based Method ForDocument8 paginiA Resistance Sign-Based Method ForFABIANCHO2210Încă nu există evaluări
- Decentralised Security Constrained DC-OPF ofDocument8 paginiDecentralised Security Constrained DC-OPF ofFABIANCHO2210Încă nu există evaluări
- Digital Linear and Nonlinear Controllers For Buck Converter: Shyama M, P.SwaminathanDocument7 paginiDigital Linear and Nonlinear Controllers For Buck Converter: Shyama M, P.SwaminathanFABIANCHO2210Încă nu există evaluări
- Hfoshoasndknasd Dbasbaeb Babrareb Barbarbar Dsbargbarf Vdadsgbareb BadfbrrebDocument7 paginiHfoshoasndknasd Dbasbaeb Babrareb Barbarbar Dsbargbarf Vdadsgbareb BadfbrrebFABIANCHO2210Încă nu există evaluări
- Optimal Power Flow in Direct Current Networks2Document6 paginiOptimal Power Flow in Direct Current Networks2FABIANCHO2210Încă nu există evaluări
- 978 3 7315 0271 5Document155 pagini978 3 7315 0271 5FABIANCHO2210Încă nu există evaluări
- Text6 1 - 37 48Document12 paginiText6 1 - 37 48Siva ReddyÎncă nu există evaluări
- DC Power OpfDocument6 paginiDC Power OpfFABIANCHO2210Încă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Vanguard 44 - Anti Tank Helicopters PDFDocument48 paginiVanguard 44 - Anti Tank Helicopters PDFsoljenitsin250% (2)
- Financial Institutions Markets and ServicesDocument2 paginiFinancial Institutions Markets and ServicesPavneet Kaur Bhatia100% (1)
- 4039-Texto Del Artículo-12948-3-10-20211123Document14 pagini4039-Texto Del Artículo-12948-3-10-20211123Ricardo ApazaÎncă nu există evaluări
- Present Tenses ExercisesDocument4 paginiPresent Tenses Exercisesmonkeynotes100% (1)
- Vendor Registration FormDocument4 paginiVendor Registration FormhiringÎncă nu există evaluări
- 1572 - Anantha Narayanan FFS CalculationDocument1 pagină1572 - Anantha Narayanan FFS CalculationAnantha NarayananÎncă nu există evaluări
- WSD M1a283 B50Document9 paginiWSD M1a283 B50'Lampa'Încă nu există evaluări
- Vest3000mkii TurntableDocument16 paginiVest3000mkii TurntableElkin BabiloniaÎncă nu există evaluări
- DHA - Jebel Ali Emergency Centre + RevisedDocument5 paginiDHA - Jebel Ali Emergency Centre + RevisedJam EsÎncă nu există evaluări
- Joomag 2020 06 12 27485398153Document2 paginiJoomag 2020 06 12 27485398153Vincent Deodath Bang'araÎncă nu există evaluări
- 1KHW001492de Tuning of ETL600 TX RF Filter E5TXDocument7 pagini1KHW001492de Tuning of ETL600 TX RF Filter E5TXSalvador FayssalÎncă nu există evaluări
- Dynamic Study of Parabolic Cylindrical Shell A Parametric StudyDocument4 paginiDynamic Study of Parabolic Cylindrical Shell A Parametric StudyEditor IJTSRDÎncă nu există evaluări
- Sheetal PatilDocument4 paginiSheetal PatilsheetalÎncă nu există evaluări
- Optical Transport Network SwitchingDocument16 paginiOptical Transport Network SwitchingNdambuki DicksonÎncă nu există evaluări
- Celula de CargaDocument2 paginiCelula de CargaDavid PaezÎncă nu există evaluări
- Art Integrated ProjectDocument14 paginiArt Integrated ProjectSreeti GangulyÎncă nu există evaluări
- Study Notes - Google Project Management Professional CertificateDocument4 paginiStudy Notes - Google Project Management Professional CertificateSWAPNIL100% (1)
- Driver Drowsiness Detection System Using Raspberry PiDocument7 paginiDriver Drowsiness Detection System Using Raspberry PiIJRASETPublicationsÎncă nu există evaluări
- Linux ProgramDocument131 paginiLinux ProgramsivashaÎncă nu există evaluări
- Guidelines For Doing Business in Grenada & OECSDocument14 paginiGuidelines For Doing Business in Grenada & OECSCharcoals Caribbean GrillÎncă nu există evaluări
- 5045.CHUYÊN ĐỀDocument8 pagini5045.CHUYÊN ĐỀThanh HuyềnÎncă nu există evaluări
- Study and Interpretation of The ScoreDocument10 paginiStudy and Interpretation of The ScoreDwightPile-GrayÎncă nu există evaluări
- An Enhanced Radio Network Planning Methodology For GSM-R CommunicationsDocument4 paginiAn Enhanced Radio Network Planning Methodology For GSM-R CommunicationsNuno CotaÎncă nu există evaluări
- Acute Suppurative Otitis MediaDocument41 paginiAcute Suppurative Otitis Mediarani suwadjiÎncă nu există evaluări
- Auditing Principles and Practices-IDocument8 paginiAuditing Principles and Practices-IMoti BekeleÎncă nu există evaluări
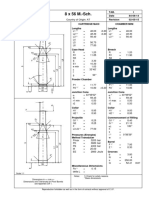
- 8 X 56 M.-SCH.: Country of Origin: ATDocument1 pagină8 X 56 M.-SCH.: Country of Origin: ATMohammed SirelkhatimÎncă nu există evaluări
- Fertilisation and PregnancyDocument24 paginiFertilisation and PregnancyLopak TikeÎncă nu există evaluări
- Law of AttractionDocument2 paginiLaw of AttractionKate SummersÎncă nu există evaluări
- Blackbook 2Document94 paginiBlackbook 2yogesh kumbharÎncă nu există evaluări
- 9701 Nos Ps 23Document5 pagini9701 Nos Ps 23Hubbak KhanÎncă nu există evaluări