S-ar putea să vă placă și
- PowerFactory EMT Model2Document14 paginiPowerFactory EMT Model2Ratana KemÎncă nu există evaluări
- Reaction rate determination and simulation of hydrogenation processDocument3 paginiReaction rate determination and simulation of hydrogenation processToMemÎncă nu există evaluări
- Assignment 3 Part 3 PDFDocument6 paginiAssignment 3 Part 3 PDFStudent555Încă nu există evaluări
- Beams: BEAM, ELE - NAME (1), CLASS (1), - OPT (1), NODE (1), ... NODE (M)Document5 paginiBeams: BEAM, ELE - NAME (1), CLASS (1), - OPT (1), NODE (1), ... NODE (M)Tran Van DaiÎncă nu există evaluări
- MK @MSITStore C ETAP 1265 Etaps - CHM TransLine Sag Tension.Document4 paginiMK @MSITStore C ETAP 1265 Etaps - CHM TransLine Sag Tension.MarioÎncă nu există evaluări
- CVT DesignDocument30 paginiCVT Designranim najibÎncă nu există evaluări
- Experimental Stress Analysis of Toggle Jack Using Fea ApproachDocument8 paginiExperimental Stress Analysis of Toggle Jack Using Fea ApproachTamil ArasanÎncă nu există evaluări
- Transmissão CVT Ivt Power Split Cammalleri ExcelenteDocument15 paginiTransmissão CVT Ivt Power Split Cammalleri ExcelenteGardenia AndradeÎncă nu există evaluări
- ADS Tutorial Explains Stability and Gain CirclesDocument12 paginiADS Tutorial Explains Stability and Gain Circlesralle0815Încă nu există evaluări
- Calculation Models ExplainedDocument13 paginiCalculation Models ExplainedCristian LiviuÎncă nu există evaluări
- Estimation of Electropneumatic Clutch Actuator Load CharacteristicsDocument6 paginiEstimation of Electropneumatic Clutch Actuator Load Characteristicsfarid_aragiÎncă nu există evaluări
- Chapter 7B 09062020 021838pm 19062023 052440pmDocument47 paginiChapter 7B 09062020 021838pm 19062023 052440pmAbdullah ZamirÎncă nu există evaluări
- 1999-Lausanne StroblDocument9 pagini1999-Lausanne StroblMiten ThakkarÎncă nu există evaluări
- Pipe Stress Analysis Using CAESAR IIDocument42 paginiPipe Stress Analysis Using CAESAR IIpca97100% (1)
- Analysis and Synthesis of Geneva MechanismsDocument12 paginiAnalysis and Synthesis of Geneva MechanismsAmthe ManÎncă nu există evaluări
- Cable Pulling GuideDocument7 paginiCable Pulling GuideBryan TanÎncă nu există evaluări
- ME301chapter10 PDFDocument28 paginiME301chapter10 PDFPablo De Lera RodríguezÎncă nu există evaluări
- Rotor Position Sensor Fault Detection Isolation and Reconfiguration of A Doubly Fed Induction Machine ControlDocument10 paginiRotor Position Sensor Fault Detection Isolation and Reconfiguration of A Doubly Fed Induction Machine Controlabdeldjabbar14Încă nu există evaluări
- Cable TensionsDocument5 paginiCable TensionszuckhÎncă nu există evaluări
- Simple Calculations For Pulling CableDocument6 paginiSimple Calculations For Pulling CableKatherine SalazarÎncă nu există evaluări
- HP AN346 3 - Effective Impedance Measurement Using OPEN SHORT Load CorrectionDocument12 paginiHP AN346 3 - Effective Impedance Measurement Using OPEN SHORT Load Correctionsirjole7584100% (1)
- Problemas para Becnhmark de Efectos de Segundo OrdenDocument15 paginiProblemas para Becnhmark de Efectos de Segundo OrdenMarco FloresÎncă nu există evaluări
- Connector force post-processing commandsDocument4 paginiConnector force post-processing commandsTran Van DaiÎncă nu există evaluări
- Performing Steady-State Pedestrian Crowd Loading Analyses for NA to BS EN 1991-2:2003 in LUSASDocument16 paginiPerforming Steady-State Pedestrian Crowd Loading Analyses for NA to BS EN 1991-2:2003 in LUSASMilind GuptaÎncă nu există evaluări
- MicroCap Info Fall2009Document16 paginiMicroCap Info Fall2009wayan.wandira8122Încă nu există evaluări
- Simple Calculations For Cable PullingDocument11 paginiSimple Calculations For Cable Pullingmsmkhan100% (1)
- 1.105 Solid Mechanics Laboratory Fall 2003: Experiment 4 The Linear, Elastic Behavior of A TrussDocument24 pagini1.105 Solid Mechanics Laboratory Fall 2003: Experiment 4 The Linear, Elastic Behavior of A Trussprieten20006936Încă nu există evaluări
- Report On Code Usage Exercise For DEEPSOIL V2.5 (Installed On An XP Home Edition System)Document12 paginiReport On Code Usage Exercise For DEEPSOIL V2.5 (Installed On An XP Home Edition System)hricha_20Încă nu există evaluări
- CMOS Transistor Sizing for Minimizing Energy-Delay ProductDocument6 paginiCMOS Transistor Sizing for Minimizing Energy-Delay Productdxtry123Încă nu există evaluări
- Analyses and Output ControlDocument10 paginiAnalyses and Output ControlSezai Alper TekinÎncă nu există evaluări
- Ground Grid SystemsDocument18 paginiGround Grid SystemsJosue Crespo GonzalezÎncă nu există evaluări
- Torsion stresses and shaft rotation in a multi-material shaftDocument27 paginiTorsion stresses and shaft rotation in a multi-material shaftsoulsellÎncă nu există evaluări
- Voltage Drop and Circuit Sizing CalculatorsDocument5 paginiVoltage Drop and Circuit Sizing Calculatorsdarsh2001patelÎncă nu există evaluări
- STRAP - Manual Strap 2017 - MÓDULO PROTENDIDODocument53 paginiSTRAP - Manual Strap 2017 - MÓDULO PROTENDIDOMarcos SouzaÎncă nu există evaluări
- Measuring Tensile Properties of Plastics Using Universal TesterDocument2 paginiMeasuring Tensile Properties of Plastics Using Universal TesterJohn JenningsÎncă nu există evaluări
- Wire Springs, - Flat Springs, or - Special ShapedDocument25 paginiWire Springs, - Flat Springs, or - Special Shapedbiruk tolossaÎncă nu există evaluări
- "Surfaces: Overview," Section 2.3.1 Coupling Kinematic Distributing "Defining Coupling Constraints," Section 15.15.4 of The Abaqus/CAE User's GuideDocument10 pagini"Surfaces: Overview," Section 2.3.1 Coupling Kinematic Distributing "Defining Coupling Constraints," Section 15.15.4 of The Abaqus/CAE User's Guidepicci4Încă nu există evaluări
- 5-Simplify Wind Alan DavenportDocument13 pagini5-Simplify Wind Alan DavenportIbrahim TarekÎncă nu există evaluări
- PowerWorld Transmission Line Parameter Calculator - TransLineCalcHelp1Document17 paginiPowerWorld Transmission Line Parameter Calculator - TransLineCalcHelp1Suresh UmadiÎncă nu există evaluări
- Analysis of Long Shoe BrakesDocument5 paginiAnalysis of Long Shoe BrakesDeepak ChachraÎncă nu există evaluări
- Torque Sensor: 3.1 Measurement MethodsDocument12 paginiTorque Sensor: 3.1 Measurement MethodsEric KerrÎncă nu există evaluări
- Flyback Transformer Tutorial Function and DesignDocument5 paginiFlyback Transformer Tutorial Function and DesignDany NewbyÎncă nu există evaluări
- Steel frame plane analysis and designDocument29 paginiSteel frame plane analysis and designHAFEELÎncă nu există evaluări
- Assignment 5: Non-Linear Lateral Tire Dynamics: Parameter Value UnitDocument3 paginiAssignment 5: Non-Linear Lateral Tire Dynamics: Parameter Value Unitshashank saiÎncă nu există evaluări
- Formal Report Lab6Document4 paginiFormal Report Lab6NurulAnisAhmadÎncă nu există evaluări
- Lab 5Document10 paginiLab 5Tayyab ZafarÎncă nu există evaluări
- Damper 2Document18 paginiDamper 2takalkars2511Încă nu există evaluări
- User loading manual for pressure functionsDocument0 paginiUser loading manual for pressure functionsMebrure Itır ÖzkoçakÎncă nu există evaluări
- Wind TurbineDocument8 paginiWind Turbinesudeeraranjan100% (1)
- 65 - Cargo Force Post-ProcessingDocument2 pagini65 - Cargo Force Post-ProcessingTran Van DaiÎncă nu există evaluări
- Creation of Stability Index For Micro Grids: I. Vokony, A. Dán DRDocument4 paginiCreation of Stability Index For Micro Grids: I. Vokony, A. Dán DRrazarazaeeÎncă nu există evaluări
- Power System Simulation Lab ManualDocument41 paginiPower System Simulation Lab ManualMary Morse100% (1)
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10De la EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Încă nu există evaluări
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesDe la EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesÎncă nu există evaluări
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDe la EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsÎncă nu există evaluări
- High-Performance D/A-Converters: Application to Digital TransceiversDe la EverandHigh-Performance D/A-Converters: Application to Digital TransceiversÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- 100 Daily Dialogues to Improve English Listening and SpeakingDocument100 pagini100 Daily Dialogues to Improve English Listening and SpeakingmaiduchuyÎncă nu există evaluări
- Bk10lq ST d10 A 001 Rev.0 Structural Design BriefDocument14 paginiBk10lq ST d10 A 001 Rev.0 Structural Design BriefTran Van DaiÎncă nu există evaluări
- Client Review Proj 4211194 SignsDocument1 paginăClient Review Proj 4211194 SignsTran Van DaiÎncă nu există evaluări
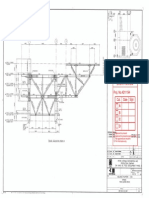
- 2013-3289!62!0100 - Rev.0 - Jacket Elevations at Row ADocument2 pagini2013-3289!62!0100 - Rev.0 - Jacket Elevations at Row ATran Van DaiÎncă nu există evaluări
- GDocument43 paginiGTran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- 2013-3289!62!0100 - Rev.0 - Jacket Elevations at Row ADocument2 pagini2013-3289!62!0100 - Rev.0 - Jacket Elevations at Row ATran Van DaiÎncă nu există evaluări
- Calculation Report For Monorail and Hatch Cover REV.0Document15 paginiCalculation Report For Monorail and Hatch Cover REV.0Tran Van DaiÎncă nu există evaluări
- Offshore Platform Manuals & DocumentsDocument1 paginăOffshore Platform Manuals & DocumentsTran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- 2013-3289-62-0110 - Rev.0 - Jacket Joint Details 1 To 11Document2 pagini2013-3289-62-0110 - Rev.0 - Jacket Joint Details 1 To 11Tran Van DaiÎncă nu există evaluări
- List of Deliverabls-Aker ProposalDocument4 paginiList of Deliverabls-Aker ProposalTran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- Visual Examination PadeyeDocument1 paginăVisual Examination PadeyeTran Van DaiÎncă nu există evaluări
- Client Review Proj 4211194 Cat Date SignDocument1 paginăClient Review Proj 4211194 Cat Date SignTran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- Client Review Proj 4211194 SignsDocument1 paginăClient Review Proj 4211194 SignsTran Van DaiÎncă nu există evaluări
- Client Review Proj 4211194 SignsDocument1 paginăClient Review Proj 4211194 SignsTran Van DaiÎncă nu există evaluări
- 2013-3289!61!0016 - Rev.0 - Jacket Standard Typical Joint DetailsDocument1 pagină2013-3289!61!0016 - Rev.0 - Jacket Standard Typical Joint DetailsTran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- 2013-3289-60-0001 - Rev.0 - Jacket Drawing IndexDocument1 pagină2013-3289-60-0001 - Rev.0 - Jacket Drawing IndexTran Van DaiÎncă nu există evaluări
- Client Review: Proj. No.4211194Document1 paginăClient Review: Proj. No.4211194Tran Van DaiÎncă nu există evaluări
- Client Review Proj 4211194 Cat SignsDocument1 paginăClient Review Proj 4211194 Cat SignsTran Van DaiÎncă nu există evaluări
- Client Review Proj 4211194 Cat SignsDocument1 paginăClient Review Proj 4211194 Cat SignsTran Van DaiÎncă nu există evaluări
- Choose the Best WordDocument7 paginiChoose the Best WordJohnny JohnnieeÎncă nu există evaluări
- Crash Cart - General Checklist For Medical Supplies On Crash CartsDocument3 paginiCrash Cart - General Checklist For Medical Supplies On Crash CartsYassen ManiriÎncă nu există evaluări
- Aircraft ChecksDocument10 paginiAircraft ChecksAshirbad RathaÎncă nu există evaluări
- E-banking and transaction conceptsDocument17 paginiE-banking and transaction conceptssumedh narwadeÎncă nu există evaluări
- IE399 Summer Training ReportDocument17 paginiIE399 Summer Training ReportgokanayazÎncă nu există evaluări
- WA Beretta M92FS Parts ListDocument2 paginiWA Beretta M92FS Parts ListDenis Deki NehezÎncă nu există evaluări
- C ClutchesDocument131 paginiC ClutchesjonarosÎncă nu există evaluări
- My16-Td My16-AtDocument6 paginiMy16-Td My16-AtRodrigo ChavesÎncă nu există evaluări
- Where On Earth Can Go Next?: AppleDocument100 paginiWhere On Earth Can Go Next?: Applepetrushevski_designeÎncă nu există evaluări
- DNT Audit Cash CountDocument2 paginiDNT Audit Cash CountAnonymous Pu7TnbCFC0Încă nu există evaluări
- Addition and Subtraction of PolynomialsDocument8 paginiAddition and Subtraction of PolynomialsPearl AdamosÎncă nu există evaluări
- Indian Institute OF Management, BangaloreDocument20 paginiIndian Institute OF Management, BangaloreGagandeep SinghÎncă nu există evaluări
- SuffrageDocument21 paginiSuffragejecelyn mae BaluroÎncă nu există evaluări
- Electronic Harassment Strahlenfolter - A Short History of Sound Weapons Pt2 - InfrasoundDocument10 paginiElectronic Harassment Strahlenfolter - A Short History of Sound Weapons Pt2 - InfrasoundFrank-BoenischÎncă nu există evaluări
- SIM5320 - EVB Kit - User Guide - V1.01 PDFDocument24 paginiSIM5320 - EVB Kit - User Guide - V1.01 PDFmarkissmuzzoÎncă nu există evaluări
- E PortfolioDocument76 paginiE PortfolioMAGALLON ANDREWÎncă nu există evaluări
- Febrile SeizureDocument3 paginiFebrile SeizureClyxille GiradoÎncă nu există evaluări
- Guidelines 2.0Document4 paginiGuidelines 2.0Hansel TayongÎncă nu există evaluări
- Riedijk - Architecture As A CraftDocument223 paginiRiedijk - Architecture As A CraftHannah WesselsÎncă nu există evaluări
- LLM DissertationDocument94 paginiLLM Dissertationjasminjajarefe100% (1)
- The Graduation Commencement Speech You Will Never HearDocument4 paginiThe Graduation Commencement Speech You Will Never HearBernie Lutchman Jr.Încă nu există evaluări
- Electrophoresis and Fractionation of Wheat GlutenDocument14 paginiElectrophoresis and Fractionation of Wheat GlutensecucaÎncă nu există evaluări
- PGP TutorialDocument21 paginiPGP TutorialSabri AllaniÎncă nu există evaluări
- Kastanakis 2014Document8 paginiKastanakis 2014Andreea Georgiana MocanuÎncă nu există evaluări
- EPF Passbook Details for Member ID RJRAJ19545850000014181Document3 paginiEPF Passbook Details for Member ID RJRAJ19545850000014181Parveen SainiÎncă nu există evaluări
- Strain Gauge Sensor PDFDocument12 paginiStrain Gauge Sensor PDFMario Eduardo Santos MartinsÎncă nu există evaluări
- Marksmanship: Subject: III. Definition of TermsDocument16 paginiMarksmanship: Subject: III. Definition of TermsAmber EbayaÎncă nu există evaluări
- HU675FE ManualDocument44 paginiHU675FE ManualMar VeroÎncă nu există evaluări