S-ar putea să vă placă și
- Model Validation: Robust Control and Identification: A Connection BetweenDocument11 paginiModel Validation: Robust Control and Identification: A Connection BetweenChristiam Morales AlvaradoÎncă nu există evaluări
- STC 107Document19 paginiSTC 107Emmanuel Ore MartinezÎncă nu există evaluări
- Discrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsDe la EverandDiscrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsÎncă nu există evaluări
- Tutorial Model Predictive Control TechnologyDocument15 paginiTutorial Model Predictive Control TechnologyYijia ZhuÎncă nu există evaluări
- Validation and Updating of FE Models For Structural AnalysisDocument10 paginiValidation and Updating of FE Models For Structural Analysiskiran2381Încă nu există evaluări
- Systems Dependability Assessment: Modeling with Graphs and Finite State AutomataDe la EverandSystems Dependability Assessment: Modeling with Graphs and Finite State AutomataÎncă nu există evaluări
- AIAA-2000-1437 Validation of Structural Dynamics Models at Los Alamos National LaboratoryDocument15 paginiAIAA-2000-1437 Validation of Structural Dynamics Models at Los Alamos National LaboratoryRomoex R RockÎncă nu există evaluări
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsDe la EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsÎncă nu există evaluări
- 2011 Garcia Vilas Santos Alonso JJPC BWDocument50 pagini2011 Garcia Vilas Santos Alonso JJPC BWCristian CanazaÎncă nu există evaluări
- Process Performance Models: Statistical, Probabilistic & SimulationDe la EverandProcess Performance Models: Statistical, Probabilistic & SimulationÎncă nu există evaluări
- Nota SemDocument39 paginiNota Semwartawan24100% (1)
- Topic 1 TheRoleofStatisticsinEngineering JayraldB - Acera BSME2A PDFDocument36 paginiTopic 1 TheRoleofStatisticsinEngineering JayraldB - Acera BSME2A PDFRuel Japhet BitoyÎncă nu există evaluări
- Jiang 2017Document14 paginiJiang 2017Luis CarvalhoÎncă nu există evaluări
- PannocchiaLaachiRawlings 10373 FTPDocument12 paginiPannocchiaLaachiRawlings 10373 FTPdougmart8Încă nu există evaluări
- Model Validation: Correlation For Updating: D J EwinsDocument14 paginiModel Validation: Correlation For Updating: D J EwinsChandan Kumar RayÎncă nu există evaluări
- Model Validation - Correlation For UpdatingDocument14 paginiModel Validation - Correlation For Updatingsumatrablackcoffee453Încă nu există evaluări
- Sobre El Uso de Modelos para La Optimizacion Dinamica en Tiempo RealDocument6 paginiSobre El Uso de Modelos para La Optimizacion Dinamica en Tiempo RealJuan AlejandroÎncă nu există evaluări
- Robust Control IssuesDocument61 paginiRobust Control IssuesinnoodiraÎncă nu există evaluări
- Research Paper On Adaptive ControlDocument4 paginiResearch Paper On Adaptive Controlvstxevplg100% (1)
- Factorial Design For Efficient ExperimentationDocument16 paginiFactorial Design For Efficient ExperimentationYurdun OrbakÎncă nu există evaluări
- System Modelling & Simulation of Energy SystemsDocument35 paginiSystem Modelling & Simulation of Energy SystemsH.J.PrabhuÎncă nu există evaluări
- Extensions To The ICH Q1E Approach For The Statistical Evaluation of Stability Data For A Large Number of LotsDocument8 paginiExtensions To The ICH Q1E Approach For The Statistical Evaluation of Stability Data For A Large Number of Lotsqac gmpÎncă nu există evaluări
- Thesis Model Predictive ControlDocument5 paginiThesis Model Predictive Controlafabkkgwv100% (2)
- Applications of Simulations in Social ResearchDocument3 paginiApplications of Simulations in Social ResearchPio FabbriÎncă nu există evaluări
- Estiamion and ResidualDocument11 paginiEstiamion and Residualanuj1166Încă nu există evaluări
- Oredo2Swlpl) Dwlrqri&Khplfdo (Qjlqhhulqj 3Odqwve/Phdqvri (Yroxwlrqdu/$OjrulwkpvDocument13 paginiOredo2Swlpl) Dwlrqri&Khplfdo (Qjlqhhulqj 3Odqwve/Phdqvri (Yroxwlrqdu/$OjrulwkpvMadhavanIceÎncă nu există evaluări
- 2017 - Campestrini, L. - Data-Driven Model Reference Control Design by Prediction Error IdentificationDocument20 pagini2017 - Campestrini, L. - Data-Driven Model Reference Control Design by Prediction Error IdentificationMatheus RangelÎncă nu există evaluări
- 2004 JQT Woodall Et AlDocument12 pagini2004 JQT Woodall Et AlWei WangÎncă nu există evaluări
- 28c5 PDFDocument8 pagini28c5 PDFtarun aggarwalÎncă nu există evaluări
- Iso 3951Document13 paginiIso 3951ziauddin bukhariÎncă nu există evaluări
- Engineering Applications of Arti Ficial Intelligence: Zeineb Lassoued, Kamel AbderrahimDocument9 paginiEngineering Applications of Arti Ficial Intelligence: Zeineb Lassoued, Kamel AbderrahimEduardo PutzÎncă nu există evaluări
- Verification and Validation of Simulation ModelsDocument18 paginiVerification and Validation of Simulation ModelsYohan OcampoÎncă nu există evaluări
- Book Reviews: European Journal of Operational Research 174 (2006) 668-674Document4 paginiBook Reviews: European Journal of Operational Research 174 (2006) 668-674faceyÎncă nu există evaluări
- Approximation of Large-Scale Dynamical Systems: An Overview: A.C. Antoulas and D.C. Sorensen August 31, 2001Document22 paginiApproximation of Large-Scale Dynamical Systems: An Overview: A.C. Antoulas and D.C. Sorensen August 31, 2001Anonymous lEBdswQXmxÎncă nu există evaluări
- American Statistical Association, American Society For Quality, Taylor & Francis, Ltd. TechnometricsDocument9 paginiAmerican Statistical Association, American Society For Quality, Taylor & Francis, Ltd. TechnometricsMarius NdongÎncă nu există evaluări
- Push and Pull Production Systems Issues and ComparisonsDocument12 paginiPush and Pull Production Systems Issues and ComparisonsjoannakamÎncă nu există evaluări
- Blanke, M. y Frei, CDocument12 paginiBlanke, M. y Frei, CRoberto DGÎncă nu există evaluări
- Researchpaper On The Estimation of Variance Components in Gage R R Studies Using Ranges ANOVADocument15 paginiResearchpaper On The Estimation of Variance Components in Gage R R Studies Using Ranges ANOVALuis Fernando Giraldo JaramilloÎncă nu există evaluări
- Feedback Control, 1a. Ed. - Stephen J. Dodds PDFDocument1.036 paginiFeedback Control, 1a. Ed. - Stephen J. Dodds PDFfaspÎncă nu există evaluări
- A Review of Methods For Input/output Selection: Marc Van de Wal, Bram de JagerDocument24 paginiA Review of Methods For Input/output Selection: Marc Van de Wal, Bram de JagerAjeet MishraÎncă nu există evaluări
- Identification of Multivariable Industrial Processes: For Simulation, Diagnosis and ControlDocument199 paginiIdentification of Multivariable Industrial Processes: For Simulation, Diagnosis and ControlSebastian Alarcon100% (1)
- UNIT 4 SeminarDocument10 paginiUNIT 4 SeminarPradeep Chaudhari50% (2)
- Gaussian Process-Based Predictive ControDocument12 paginiGaussian Process-Based Predictive ContronhatvpÎncă nu există evaluări
- An Introduction To Nonlinear Model Predictive ControlDocument23 paginiAn Introduction To Nonlinear Model Predictive ControlSohibul HajahÎncă nu există evaluări
- Broc, Guillaume - Gana, Kamel - Structural Equation Modeling With Lavaan-Wiley-ISTE (2019) - 61-63Document3 paginiBroc, Guillaume - Gana, Kamel - Structural Equation Modeling With Lavaan-Wiley-ISTE (2019) - 61-63Ira Hanifah Nuha BalqisÎncă nu există evaluări
- Evaluation Robust Design Methods Using A Model of Interactions in Complex SystemsDocument17 paginiEvaluation Robust Design Methods Using A Model of Interactions in Complex SystemsIonut DumistrascuÎncă nu există evaluări
- 1981 Trends in IdentificationDocument15 pagini1981 Trends in IdentificationMohammed Abdul HaiÎncă nu există evaluări
- 4 Methods of Verification and ValidationDocument9 pagini4 Methods of Verification and ValidationIvonne HernandezÎncă nu există evaluări
- CH01 ModelingSystemsDocument20 paginiCH01 ModelingSystemspraveen alwisÎncă nu există evaluări
- 11 Product Line Use Cases: Scenario-Based Specification and Testing of RequirementsDocument21 pagini11 Product Line Use Cases: Scenario-Based Specification and Testing of RequirementsPaullo SampaioÎncă nu există evaluări
- Best Generalisation Error PDFDocument28 paginiBest Generalisation Error PDFlohit12Încă nu există evaluări
- 06 Chapter 1Document14 pagini06 Chapter 1Dharmaraj MaheswariÎncă nu există evaluări
- Model Predictive Control PHD ThesisDocument7 paginiModel Predictive Control PHD ThesisWendy Belieu100% (2)
- Newbold Et Al 94 Adventures With Arima SoftwareDocument9 paginiNewbold Et Al 94 Adventures With Arima SoftwarePeterParker1983Încă nu există evaluări
- 2009 Murray Smith DSCDocument143 pagini2009 Murray Smith DSCminhtrieudoddtÎncă nu există evaluări
- Introduction To Modeling and SimulationDocument7 paginiIntroduction To Modeling and SimulationAbiodun Gbenga100% (2)
- Simulation Tools For Electromagnetic Transients in Power Systems: Overview and ChallengesDocument13 paginiSimulation Tools For Electromagnetic Transients in Power Systems: Overview and Challengescastilho22Încă nu există evaluări
- Basecam Simple BGCDocument16 paginiBasecam Simple BGCMarco Aurelio Jiménez ReyesÎncă nu există evaluări
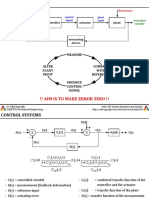
- !! Aim Is To Make Error Zero !!: Controller Actuator PlantDocument11 pagini!! Aim Is To Make Error Zero !!: Controller Actuator PlantcapturemrahÎncă nu există evaluări
- Filter DesignDocument42 paginiFilter DesignShivanshu Trivedi100% (1)
- PHD Call For ApplicationDocument41 paginiPHD Call For ApplicationAptu Andy KurniawanÎncă nu există evaluări
- Masibus 8208 ManualDocument36 paginiMasibus 8208 ManualCraig Godfrey100% (1)
- Fees Details WP - Technocrat AutomationDocument16 paginiFees Details WP - Technocrat AutomationsushantadharÎncă nu există evaluări
- Constrained Model Predictive Control in Ball Mill Grinding ProcessDocument9 paginiConstrained Model Predictive Control in Ball Mill Grinding ProcessHumbulaniÎncă nu există evaluări
- Model Based Design of Pid Controller For BLDC Motor With Implementation ofDocument8 paginiModel Based Design of Pid Controller For BLDC Motor With Implementation ofBrasoveanu GheorghitaÎncă nu există evaluări
- TB Series User Manual PDFDocument31 paginiTB Series User Manual PDFEl MacheteÎncă nu există evaluări
- PSO Technique Applied To Sensorless Field-Oriented Control PMSM Drive With Discretized RL-fractional IntegralDocument12 paginiPSO Technique Applied To Sensorless Field-Oriented Control PMSM Drive With Discretized RL-fractional IntegralfvijayamiÎncă nu există evaluări
- Advantages and Disadvantages of The Different Types of ControllersDocument3 paginiAdvantages and Disadvantages of The Different Types of ControllersLakshmi CheedellaÎncă nu există evaluări
- Backstepping Control: 7.1 Motivation and Problem StatementDocument10 paginiBackstepping Control: 7.1 Motivation and Problem StatementbrajeshÎncă nu există evaluări
- (Studies in Systems Decision and Control 115) Fridman, Leonid_ Li, Shihua_ Man, Zhihong_ Wang, Xiangyu_ Yu, Xing Huo-Advances in Variable Structure Systems and Sliding Mode Control -- Theory and AppliDocument414 pagini(Studies in Systems Decision and Control 115) Fridman, Leonid_ Li, Shihua_ Man, Zhihong_ Wang, Xiangyu_ Yu, Xing Huo-Advances in Variable Structure Systems and Sliding Mode Control -- Theory and AppliHipólito AguilarÎncă nu există evaluări
- Drone Simulation and Control Usin Matlab and SimulinkDocument31 paginiDrone Simulation and Control Usin Matlab and Simulinkabenezer zegeyeÎncă nu există evaluări
- Main 3 PDF FreeDocument51 paginiMain 3 PDF FreeSantiagoo4life AliÎncă nu există evaluări
- Governing System of Gas TurbineDocument128 paginiGoverning System of Gas Turbinesaptarshi roy100% (3)
- ME2142-2 Lab MAnual Speed and Position ControlDocument9 paginiME2142-2 Lab MAnual Speed and Position ControlMohammad Taha IrfanÎncă nu există evaluări
- Acs-1000 10105Document5 paginiAcs-1000 10105IqraÎncă nu există evaluări
- How High Can You Go?: New Approaches For Cooling System EfficiencyDocument4 paginiHow High Can You Go?: New Approaches For Cooling System EfficiencyagnieasÎncă nu există evaluări
- Digital FiltersDocument24 paginiDigital FiltersRharif AnassÎncă nu există evaluări
- Objectives: 054414 Process Control System DesignDocument11 paginiObjectives: 054414 Process Control System Designalan campezziÎncă nu există evaluări
- Control Systems Laboratory: Hamza OSAMA &haider Jamal&salah MahdiDocument27 paginiControl Systems Laboratory: Hamza OSAMA &haider Jamal&salah MahdiAhmed Mohammed khalfÎncă nu există evaluări
- Finite Impulse Response-Chapter 5 PDFDocument74 paginiFinite Impulse Response-Chapter 5 PDFEdsonÎncă nu există evaluări
- Control System Lab ManualDocument20 paginiControl System Lab ManualvaibhavÎncă nu există evaluări
- Towards Functional Safety in Drive-By Wire Vehicles by Peter Johannes BergmillerDocument236 paginiTowards Functional Safety in Drive-By Wire Vehicles by Peter Johannes BergmillerAimee HallÎncă nu există evaluări
- Quanser Robotics Platforms BrochureDocument8 paginiQuanser Robotics Platforms BrochureAdriano Nogueira DrumondÎncă nu există evaluări
- Dynamic Simulation and Process Control With Aspen HysysDocument79 paginiDynamic Simulation and Process Control With Aspen HysysMOHANRAJ.GÎncă nu există evaluări
- Embedded ProjectsDocument20 paginiEmbedded ProjectsJeno MansurÎncă nu există evaluări
- Laboratory Guide: Active Suspension Experiment For Labview UsersDocument20 paginiLaboratory Guide: Active Suspension Experiment For Labview UsersOKIDI Thomas BecketÎncă nu există evaluări
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedDe la EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedEvaluare: 5 din 5 stele5/5 (1)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionDe la EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionEvaluare: 4.5 din 5 stele4.5/5 (3)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseDe la EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseEvaluare: 4.5 din 5 stele4.5/5 (51)
- Chasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItDe la EverandChasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItEvaluare: 4 din 5 stele4/5 (25)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisDe la EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisEvaluare: 4 din 5 stele4/5 (2)
- Laminar Flow Forced Convection in Ducts: A Source Book for Compact Heat Exchanger Analytical DataDe la EverandLaminar Flow Forced Convection in Ducts: A Source Book for Compact Heat Exchanger Analytical DataÎncă nu există evaluări
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CDe la EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CÎncă nu există evaluări
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ADe la EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AÎncă nu există evaluări
- Machinery's Handbook Pocket Companion: Quick Access to Basic Data & More from the 31st EditionDe la EverandMachinery's Handbook Pocket Companion: Quick Access to Basic Data & More from the 31st EditionÎncă nu există evaluări
- The Laws of Thermodynamics: A Very Short IntroductionDe la EverandThe Laws of Thermodynamics: A Very Short IntroductionEvaluare: 4.5 din 5 stele4.5/5 (10)
- Bulk Material Handling: Practical Guidance for Mechanical EngineersDe la EverandBulk Material Handling: Practical Guidance for Mechanical EngineersEvaluare: 5 din 5 stele5/5 (1)
- Safety Theory and Control Technology of High-Speed Train OperationDe la EverandSafety Theory and Control Technology of High-Speed Train OperationEvaluare: 5 din 5 stele5/5 (2)
- Airplane Flying Handbook: FAA-H-8083-3C (2024)De la EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Evaluare: 4 din 5 stele4/5 (12)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsDe la EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongÎncă nu există evaluări
- Mechanical Vibrations and Condition MonitoringDe la EverandMechanical Vibrations and Condition MonitoringEvaluare: 5 din 5 stele5/5 (1)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsDe la EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsEvaluare: 3.5 din 5 stele3.5/5 (3)
- Handbook of Mechanical and Materials EngineeringDe la EverandHandbook of Mechanical and Materials EngineeringEvaluare: 5 din 5 stele5/5 (4)
- Electrical (Generator and Electrical Plant): Modern Power Station PracticeDe la EverandElectrical (Generator and Electrical Plant): Modern Power Station PracticeEvaluare: 4 din 5 stele4/5 (9)
- Gas Turbines: A Handbook of Air, Land and Sea ApplicationsDe la EverandGas Turbines: A Handbook of Air, Land and Sea ApplicationsEvaluare: 4 din 5 stele4/5 (9)