S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Cummin C1100 Fuel System Flow DiagramDocument8 paginiCummin C1100 Fuel System Flow DiagramDaniel KrismantoroÎncă nu există evaluări
- Workbook Group TheoryDocument62 paginiWorkbook Group TheoryLi NguyenÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
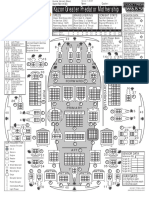
- Kazon Greater Predator MothershipDocument1 paginăKazon Greater Predator MothershipknavealphaÎncă nu există evaluări
- UntitledDocument216 paginiUntitledMONICA SIERRA VICENTEÎncă nu există evaluări
- Buried PipelinesDocument93 paginiBuried PipelinesVasant Kumar VarmaÎncă nu există evaluări
- Performance Monitoring and Coaching FormDocument3 paginiPerformance Monitoring and Coaching Formjanine masilang100% (2)
- Man As God Created Him, ThemDocument3 paginiMan As God Created Him, ThemBOEN YATORÎncă nu există evaluări
- Music 10 (2nd Quarter)Document8 paginiMusic 10 (2nd Quarter)Dafchen Villarin MahasolÎncă nu există evaluări
- Pityriasis VersicolorDocument10 paginiPityriasis Versicolorketty putriÎncă nu există evaluări
- Pg2022 ResultDocument86 paginiPg2022 ResultkapilÎncă nu există evaluări
- Man and Historical ActionDocument4 paginiMan and Historical Actionmama.sb415Încă nu există evaluări
- C2 - Conveyors Diagram: Peso de Faja Longitud de CargaDocument1 paginăC2 - Conveyors Diagram: Peso de Faja Longitud de CargaIvan CruzÎncă nu există evaluări
- Book 1518450482Document14 paginiBook 1518450482rajer13Încă nu există evaluări
- Mechanical Production Engineer Samphhhhhle ResumeDocument2 paginiMechanical Production Engineer Samphhhhhle ResumeAnirban MazumdarÎncă nu există evaluări
- Test 51Document7 paginiTest 51Nguyễn Hiền Giang AnhÎncă nu există evaluări
- Physics Education Thesis TopicsDocument4 paginiPhysics Education Thesis TopicsPaperWriterServicesCanada100% (2)
- 50114a Isolemfi 50114a MonoDocument2 pagini50114a Isolemfi 50114a MonoUsama AwadÎncă nu există evaluări
- Summary of Bill of Quantities ChurchDocument52 paginiSummary of Bill of Quantities ChurchBiniamÎncă nu există evaluări
- Acute Appendicitis in Children - Diagnostic Imaging - UpToDateDocument28 paginiAcute Appendicitis in Children - Diagnostic Imaging - UpToDateHafiz Hari NugrahaÎncă nu există evaluări
- Brand Strategy - in B2BDocument6 paginiBrand Strategy - in B2BKrishan SahuÎncă nu există evaluări
- W25509 PDF EngDocument11 paginiW25509 PDF EngNidhi SinghÎncă nu există evaluări
- Eggermont 2019 ABRDocument15 paginiEggermont 2019 ABRSujeet PathakÎncă nu există evaluări
- Guyana and The Islamic WorldDocument21 paginiGuyana and The Islamic WorldshuaibahmadkhanÎncă nu există evaluări
- Apron CapacityDocument10 paginiApron CapacityMuchammad Ulil AidiÎncă nu există evaluări
- Application Form InnofundDocument13 paginiApplication Form InnofundharavinthanÎncă nu există evaluări
- Global Divides: The North and The South: National University Sports AcademyDocument32 paginiGlobal Divides: The North and The South: National University Sports AcademyYassi CurtisÎncă nu există evaluări
- Julia Dito ResumeDocument3 paginiJulia Dito Resumeapi-253713289Încă nu există evaluări
- (Jones) GoodwinDocument164 pagini(Jones) Goodwinmount2011Încă nu există evaluări
- Assignment of Chemistry For B.sc-B.ed First Semester Session 2019-2023-1Document2 paginiAssignment of Chemistry For B.sc-B.ed First Semester Session 2019-2023-1Payal sahaÎncă nu există evaluări
- Department of Education: Republic of The PhilippinesDocument1 paginăDepartment of Education: Republic of The PhilippinesJonathan CayatÎncă nu există evaluări