S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- An Invariance Principle in The Theory of StabilityDocument12 paginiAn Invariance Principle in The Theory of StabilitycastrojpÎncă nu există evaluări
- TurboGen ConstructionDocument71 paginiTurboGen Constructiondevanand_sawantÎncă nu există evaluări
- Cambridge IGCSE Mathematics - Core & Extended, 3rd EditionDocument511 paginiCambridge IGCSE Mathematics - Core & Extended, 3rd EditionAnderson Alfred86% (21)
- Commissioning Complex Busbar Prot SchemesDocument9 paginiCommissioning Complex Busbar Prot Schemesrasheed313Încă nu există evaluări
- Absolute Stability of Nonlinear Systems of Automatic ControlDocument21 paginiAbsolute Stability of Nonlinear Systems of Automatic ControlcastrojpÎncă nu există evaluări
- Spherical TankDocument6 paginiSpherical Tankhgag selimÎncă nu există evaluări
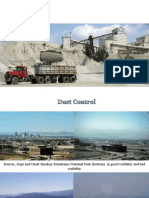
- Dust CollectorsDocument50 paginiDust Collectorsprakash bhadoria100% (1)
- Appendix M - The Damping Constant of A Freely Oscillating DipoleDocument2 paginiAppendix M - The Damping Constant of A Freely Oscillating DipolecastrojpÎncă nu există evaluări
- ElectromagneticsDocument20 paginiElectromagneticscastrojp0% (2)
- Appendix D - The Associated Legendre EquationDocument6 paginiAppendix D - The Associated Legendre EquationcastrojpÎncă nu există evaluări
- Mathematical Supplement Part IDocument7 paginiMathematical Supplement Part IcastrojpÎncă nu există evaluări
- Appendix e - Composition of General SourcesDocument2 paginiAppendix e - Composition of General SourcescastrojpÎncă nu există evaluări
- Appendix N - The Average Magnetostatic Field Intensity Inside A Sphere Containing An Arbitrary Distribution of Current LoopsDocument5 paginiAppendix N - The Average Magnetostatic Field Intensity Inside A Sphere Containing An Arbitrary Distribution of Current LoopscastrojpÎncă nu există evaluări
- Appendix L - The Dynamic Macroscopic Scalar Potential Function Due To A Volume of Polarized Dielectric MaterialDocument3 paginiAppendix L - The Dynamic Macroscopic Scalar Potential Function Due To A Volume of Polarized Dielectric MaterialcastrojpÎncă nu există evaluări
- Appendix C - Some Properties of Bessel FunctionsDocument5 paginiAppendix C - Some Properties of Bessel FunctionscastrojpÎncă nu există evaluări
- Appendix A - Fringe Shift Versus Rotation of The Michelson-Morley ApparatusDocument2 paginiAppendix A - Fringe Shift Versus Rotation of The Michelson-Morley ApparatuscastrojpÎncă nu există evaluări
- 5266347Document13 pagini5266347castrojpÎncă nu există evaluări
- Appendix C - Some Properties of Bessel FunctionsDocument5 paginiAppendix C - Some Properties of Bessel FunctionscastrojpÎncă nu există evaluări
- 5266375Document14 pagini5266375castrojpÎncă nu există evaluări
- Appendix B - Classical Doppler Shift From A Moving Source in The Presence of A Moving EtherDocument4 paginiAppendix B - Classical Doppler Shift From A Moving Source in The Presence of A Moving EthercastrojpÎncă nu există evaluări
- About The AuthorsDocument2 paginiAbout The AuthorscastrojpÎncă nu există evaluări
- 5397092Document10 pagini5397092castrojpÎncă nu există evaluări
- 5266325Document23 pagini5266325castrojpÎncă nu există evaluări
- Mentor12 Ingles ScreenDocument16 paginiMentor12 Ingles ScreencastrojpÎncă nu există evaluări
- Discrete-Time Multivariable Adaptive ControlDocument10 paginiDiscrete-Time Multivariable Adaptive ControlcastrojpÎncă nu există evaluări
- I El 217Document74 paginiI El 217selvamuthukumarÎncă nu există evaluări
- Electrical Power SystemsDocument11 paginiElectrical Power SystemscastrojpÎncă nu există evaluări
- Optimal Regulation ProcessesDocument21 paginiOptimal Regulation ProcessescastrojpÎncă nu există evaluări
- Notes On The Illustrations: and Measurement at The National Bureau of Standards, by Wilbert F. Synder andDocument1 paginăNotes On The Illustrations: and Measurement at The National Bureau of Standards, by Wilbert F. Synder andcastrojpÎncă nu există evaluări
- On Self Tuning RegulatorsDocument17 paginiOn Self Tuning RegulatorscastrojpÎncă nu există evaluări
- Control System Synthesis by Root Locus MethodDocument6 paginiControl System Synthesis by Root Locus MethodcastrojpÎncă nu există evaluări
- Control TheoryDocument8 paginiControl TheorycastrojpÎncă nu există evaluări
- Decoupling and Pole Assignment in Linear Multivariable Systems AGeometric ApproachDocument20 paginiDecoupling and Pole Assignment in Linear Multivariable Systems AGeometric ApproachcastrojpÎncă nu există evaluări
- Appendix 4 - Numerical Values For Some Important Physical ConstantsDocument1 paginăAppendix 4 - Numerical Values For Some Important Physical ConstantscastrojpÎncă nu există evaluări
- Segura 2017 Seismic Performance Limitation of Slender Reinforced Concrete Structural WallsDocument268 paginiSegura 2017 Seismic Performance Limitation of Slender Reinforced Concrete Structural WallsDavid VallejoÎncă nu există evaluări
- Physics Paper IIT JAM 2014Document22 paginiPhysics Paper IIT JAM 2014acÎncă nu există evaluări
- Shanthi PavanDocument12 paginiShanthi PavanAasif HameedÎncă nu există evaluări
- C150Y LDPE Petlin MalaysiaDocument1 paginăC150Y LDPE Petlin MalaysiaLong Trịnh ĐìnhÎncă nu există evaluări
- Thermo Chemistry VrazDocument56 paginiThermo Chemistry VrazSindhu KemburuÎncă nu există evaluări
- Cosechadora 522B Plano Electrico 2015 SIS PDFDocument18 paginiCosechadora 522B Plano Electrico 2015 SIS PDFFabrizio JesúsÎncă nu există evaluări
- The Potters WheelDocument13 paginiThe Potters WheeltheknottymemesÎncă nu există evaluări
- PNOZ s4 1 Operat Man 21890-EN-12Document36 paginiPNOZ s4 1 Operat Man 21890-EN-12Bruno YaconoÎncă nu există evaluări
- Effect of Formations Anisotropy On Directional Tendencies of Drilling SystemsDocument10 paginiEffect of Formations Anisotropy On Directional Tendencies of Drilling SystemsMejbahul SarkerÎncă nu există evaluări
- Application Software Dual Path Control DPCDocument16 paginiApplication Software Dual Path Control DPCIrina VarzouÎncă nu există evaluări
- Technical Data Sheet: Vacuum Pump V-100Document6 paginiTechnical Data Sheet: Vacuum Pump V-100Palak AgarwalÎncă nu există evaluări
- Creation Pro-2020Document2 paginiCreation Pro-2020Owais AhmedÎncă nu există evaluări
- Transport and InstallationDocument11 paginiTransport and InstallationalbertoÎncă nu există evaluări
- Fundamentals of Cavity PreprationDocument70 paginiFundamentals of Cavity PreprationSATNAMÎncă nu există evaluări
- Welding Procedure Specification's (WPS) : Presented by John Lucas Welding Engineer UTI CorporationDocument30 paginiWelding Procedure Specification's (WPS) : Presented by John Lucas Welding Engineer UTI CorporationCris VillapanaÎncă nu există evaluări
- Unit 1 Electricity and MagnetismDocument81 paginiUnit 1 Electricity and Magnetismeric appiahÎncă nu există evaluări
- Bernoullis Equation EngineeringduniyacomDocument26 paginiBernoullis Equation EngineeringduniyacomMuhammad DodyÎncă nu există evaluări
- Mahajan Et Al 2023 Three Dimensional Physical Modeling of Response of Existing Metro Tunnel To Pile Loading in DelhiDocument17 paginiMahajan Et Al 2023 Three Dimensional Physical Modeling of Response of Existing Metro Tunnel To Pile Loading in Delhibillkhandai007Încă nu există evaluări
- TRM Reinforced Tuff Fired Clay Brick Masonry In-Plane Out-Of-PlaneDocument23 paginiTRM Reinforced Tuff Fired Clay Brick Masonry In-Plane Out-Of-PlaneJuan Felipe Garcia MontesÎncă nu există evaluări
- Content-Based Discussion (Benzene)Document46 paginiContent-Based Discussion (Benzene)nang kubaiÎncă nu există evaluări
- Akson College of Pharmacy: Subject Quality Management Topic Submitted by Roll No Submitted To Submission DateDocument14 paginiAkson College of Pharmacy: Subject Quality Management Topic Submitted by Roll No Submitted To Submission DateJaved IqbalÎncă nu există evaluări
- Lap Former The Objective of Lap FormerDocument40 paginiLap Former The Objective of Lap FormerAhmed Ifsan NayeemÎncă nu există evaluări
- Sciences An Integrated Approach 6th Edition Trefil Test BankDocument25 paginiSciences An Integrated Approach 6th Edition Trefil Test BankMissKellieSmithMDfqsb100% (43)
- Alarmes CTX310 Eco PDF Switch MachinesDocument1 paginăAlarmes CTX310 Eco PDF Switch MachinessegapozÎncă nu există evaluări
- Service Manual: MVC-FD85/FD90Document112 paginiService Manual: MVC-FD85/FD90Anonymous Lfgk6vygÎncă nu există evaluări
- Vapor Power CyclesDocument27 paginiVapor Power Cycleshrithik khannaÎncă nu există evaluări