Documente Academic
Documente Profesional
Documente Cultură
Chap6 Vibrations 1ddl VAS1 Potel Gatignol
Încărcat de
Alinour ViDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Chap6 Vibrations 1ddl VAS1 Potel Gatignol
Încărcat de
Alinour ViDrepturi de autor:
Formate disponibile
A noter que la numrotation des paragraphes adopte ici est calque sur celle du cours oral
afin de faciliter le suivi du cours magistral, mais ne rpond pas aux normes de prsentation
usuelles d'un document crit.
COURS DE MECANIQUE - VIBRATIONS
1re anne
Catherine POTEL, Philippe GATIGNOL
Chapitre 6.
VIBRATIONS - OSCILLATEURS HARMONIQUES
Universit du Maine - UFR Sciences et Techniques
Catherine Potel, Philippe Gatignol
Universit du Maine, Le Mans
Catherine Potel, Philippe Gatignol
Universit du Maine, Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
Les points importants de ce chapitre sont :
Distinction entre mouvement libre/mouvement forc, rgime
transitoire/rgime permanent, frquence propre/frquence de
rsonance/frquence d'excitation,
rgime apriodique/critique/pseudo-priodique
INTRODUCTION
Gnralits
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
Un exemple pratique d'un tel oscillateur est celui de la suspension d'un vhicule automobile.
2
Schmatisation
Beaucoup de mcanismes, comme une voiture (figure 6.1), peuvent se ramener un systme
masse-ressort dont on tudie les vibrations.
1re tape :
pas d'amortissement
Rappel : Une fonction f est priodique de priode T si et seulement si :
x D f , f (x + T ) = f (x ) .
Exemples : les fonctions sinus et cosinus sont priodiques de priode 2 , la fonction tangente
Nous allons dvelopper ces ides gnrales par l'tude du cas particulier fondamental de
l'oscillateur un seul degr de libert. Nous tudierons tour tour les mouvements libres de
cet oscillateur quand il n'est pas amorti, puis avec de l'amortissement. Nous tudierons ensuite
les vibrations forces de cet oscillateur, en distinguant nouveau le cas non amorti et le cas
amorti. On mettra en particulier en vidence le phnomne de rsonance.
- 6.1 -
3me tape :
vibrations forces
sol ingal
oscillations forces, amorties
ou non
)
Figure 6.1 : Etapes de schmatisation d'un mcanisme par un systme masse-ressort
Le dplacement de la roue, d l'ingalit du sol et la vitesse d'avancement de la voiture,
peut s'exprimer comme un dplacement impos dpendant du temps, provoquant ainsi une
oscillation force du mcanisme de suspension. On verra comment exprimer cette excitation
en fonction du temps t .
(6.1)
est priodique de priode .
Catherine Potel
oscillations libres amorties
b)
En gnral, les systmes mcaniques prsentent de l'amortissement et les vibrations libres
dcroissent au cours du temps pour devenir plus ou moins insignifiantes. Au contraire, les
vibrations forces subsistent tant qu'il y a excitation.
propres : ce n'est pas en gnral un mouvement priodique.
2me tape :
avec amortissement
Un tel mouvement peut
- soit tre provoqu par une excitation : on parle alors de vibrations forces ;
- soit tre le rsultat d'une action impose un instant donn (telle que dplacer le systme
de sa position de repos, ou lui imposer une impulsion initiale) : on parle alors d'oscillations
libres.
Un systme mcanique non amorti possde des vibrations libres particulires qui ont la
particularit d'tre priodiques par rapport au temps : c'est ce que l'on appelle les vibrations
propres. Les frquences correspondantes sont les frquences propres du systme. Le
mouvement libre le plus gnral pour un systme est une combinaison de ces vibrations
oscillations libres non amorties
a)
Une vibration est le mouvement d'un systme mcanique qui reste voisin d'un tat de repos.
Universit du Maine - Le Mans
L'application du Principe Fondamental de la Dynamique permet d'obtenir une quation
diffrentielle du second ordre coefficients constants, avec ou sans second membre, que
l'on rsout pour obtenir la loi horaire cherche :
a &x& + b x& + c x = 0 ,
ou
a &x& + b x& + c x = f (t) , avec
(a, b, c )
(6.2-a)
(6.2-b)
L'exemple du mouvement du pendule circulaire, tudi au chapitre 4, III.1, conduit
l'quation
a && + g = 0 ,
(6.3)
qui est de la forme (6.2-a) avec b = 0 .
Catherine Potel
- 6.2 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
II
OSCILLATIONS LINEAIRES LIBRES NON AMORTIES
1.
Dfinitions
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
0 =
c
a
(6.8)
2
0
(6.9)
est la pulsation propre (ou pulsation naturelle)
9 Oscillations libres
Si un systme, abandonn lui-mme autour d'une situation d'quilibre stable, volue ensuite
de part et d'autre de cet tat, on parle alors d'oscillations libres.
T0 =
et
la priode propre.
L'tat instantan du systme est caractris par l'volution d'une grandeur physique mesurable
(dplacement x (t ) ou angle (t ) ) qui rend compte de l'cart du systme par rapport la
position d'quilibre.
9 La solution gnrale de l'quation (6.7) est de la forme (figure 6.2)
x (t ) = A cos 0 t + ,
15
9 Oscillateur linaire
L'quation diffrentielle qui rgit l'volution de la grandeur caractristique x (t ) (ou ) est
o x t est la loi horaire du mouvement, A
A
son amplitude (de mme dimension que x ),
0 la pulsation propre (en rad.s 1 ) et la
t
10
phase (en rad).
Les grandeurs A et sont des constantes
T0
-15
dtermines partir des conditions initiales.
Figure 6.2
linaire.
Remarques.
Rappel : Fonction linaire (dans )
L'application f de dans est linaire si et seulement si
x 1, x 2
9 x (t ) est la grandeur physique mesurable, mais si un angle est mesur, il est d'usage
) ( ) ( )
, f x1+x 2 =f x1 +f x 2 ,
(6.4-a)
, x , f ( x ) = f (x ) ,
et
ce qui peut se rsumer par
x 1, x 2
(6.4-b)
d'utiliser une lettre grecque telle , et l'quation (6.7) s'crit alors
&& + 2 = 0 ,
0
(6.11)
ce qui ne change rien la gnralit de l'expos qui prcde.
, 1, 2
( )
( )
, f 1x1 + 2 x 2 = 1f x1 + 2 f x 2
. (6.5)
9 L'quation (6.7) est bien linaire (voir dfinitions (6.4) ou (6.5)) : si les fonctions x 1 (t ) et
x 2 (t ) sont solutions de cette quation, 1, 2
Exemple de fonction linaire : f (x ) = a x .
Exemple de fonction non linaire : f (x ) = a x + b .
2.
(6.10)
bg
x
9 Oscillations non amorties
Si, pendant la dure des mesures, les phnomnes de dissipation de l'nergie sous forme de
chaleur (frottements) provoquent une diminution de l'amplitude des oscillations, infrieure
la sensibilit des appareils de mesure, on peut qualifier les oscillations de non amorties.
, la fonction 1 x 1 + 2 x 2 est
galement solution de l'quation.
9 La solution (6.10) de l'quation (6.7) peut galement s'crire
x (t ) = A 1 cos 0 t 1 ,
Forme de l'quation du mouvement
(
)
x (t ) = A 2 sin ( 0 t + 2 ) ,
x (t ) = A 3 sin ( 0 t 3 ) .
(6.12-a)
(6.12-b)
9 L'quation du mouvement, comme on va le voir dans la suite de ce , est de la forme
a &x& + c x = 0 ,
(6.6)
ou encore
que l'on crit prfrentiellement
Quelle que soit l'criture, la solution est bien en dfinitive toujours la mme, mais, a priori, les
constantes A , A 1 , A 2 et A 3 ne sont pas gales entre elles, tout comme les constantes ,
&x& + 02 x = 0 ,
Catherine Potel
- 6.3 -
(6.7)
Universit du Maine - Le Mans
(6.12-c)
1 , 2 et 3 ne le sont pas non plus. Il convient de noter de plus qu'crire i n'est qu'une
Catherine Potel
- 6.4 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
Chapitre 6 : Vibrations - Oscillateur harmonique
question d'habitude qui n'a aucune incidence sur le rsultat final, puisque les arguments i
sont algbriques et modulo 2 .
Rappel.
)
( )
(
) ( )
sin ( 0 t + 2 ) = cos( 0 t ) ,
sin ( 0 t 2 ) = cos( 0 t ) .
cos 0 t + 2 = sin 0 t ,
cos 0 t 2 = sin 0 t ,
3.
R (ext M ) =
soit
(6.13-a)
(6.13-b)
(6.13-c)
(6.13-d)
O
r
ex
r
ey
r
e x1
0
A
x0
y0
l
position du fil est repre par l'axe O x 1 , faisant un
laquelle est accroche une masse m considre
comme ponctuelle au point M . La tige est en liaison
r
pivot sans frottements d'axe O, e z 0 avec le bti. La
x1
angle avec l'axe O x 0 (figure 6.3). Le repre
r r r
R 0 = O, e x 0 , e y 0 , e z 0 est galilen, l'acclration de
r
r
la pesanteur tant telle que g = g e x 0 .
Figure 6.3
Les conditions initiales sont les suivantes : t = 0 , le point M est lanc au point A ( = 0)
avec une certaine vitesse v 0 = l & 0 ( & 0 > 0 par exemple).
Systme tudi : { le point M }.
m g cos
m g sin .
B1
0
r
- Action du fil sur M : {fil M} = M, T , avec
r
r
T = T e x 1 , T > 0 .
Catherine Potel
- 6.5 -
(6.18)
(6.19)
(6.20)
x L'acclration du point M par rapport au repre R 0 s'crit
r
d V M /R 0
r
,
M /R 0 =
dt
/B 0
(6.21)
soit, en appliquant la formule de changement de base de drivation
r
d V M /R 0
r
r
r
+ B 1 /B 0 V M /R 0
M /R 0 =
dt
/B 1
r
r
r
r
M / R 0 = l && e y 1 + & e z 0 l & e y 1 ,
soit
r
r
r
M / R 0 = l & 2 e x 1 + l && e y 1 .
d'o
PFD pour le point matriel
(6.14)
La rsultante des actions mcaniques est donc
r r
R (ext M ) = P + T ,
/B 0
soit, en appliquant la formule de changement de base de drivation
r
r
d OM
V M /R 0 =
+ B 1 / B 0 OM ,
dt
/B 1
r
r
r
r
r
&
soit
V M / R 0 = 0 + e z 0 l e x 1 = l & e y 1 .
r
r
P = mge x 0 =
) (
x La rsultante dynamique du point M par rapport au repre R 0 s'crit donc :
r
r
r
d M / R 0 = m l & 2 e x 1 + m l && e y 1 .
Inventaire des forces :
r
- Action de la gravit : { M} = M, P , avec
x La vitesse du point M par rapport au repre R 0 s'crit
Le systme de la figure 6.3 est constitu d'un fil
inextensible et sans masse de longueur OM = l
y1
(6.16-b)
r
d OM
V M /R 0 =
dt
Ce systme a dj t tudi au chapitre 4, III.
r
ey1
m g cos T
m g sin .
B1
0
Rsultante dynamique :
r r r
x Le vecteur position OM est donn par ses composantes sur la base B1 = e x 1 , e y 1 , e z 0 :
r
OM = l e x 1 .
(6.17)
Retour sur le pendule circulaire
r
ez
DEUST VAS1
Universit du Maine - Le Mans
r
R (ext M ) = d M / R 0
r
r
soit, en projection sur e x 1 et sur e y 1 ,
m g cos T = m l & 2 ,
m g sin = m l && .
(6.15)
(6.16-a)
L'quation du mouvement (6.27-b) s'crit encore
l && + g sin = 0 .
Catherine Potel
- 6.6 -
(6.22)
(6.23)
(6.24)
(6.25)
(6.26)
(6.27-a)
(6.27-b)
(6.28)
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
Dans le cas des petits angles (petites oscillations),
sin ,
(6.29)
avec exprim en radian. Cette approximation est appele approximation harmonique.
L'quation (6.28) s'crit alors, compte tenu de (6.29)
l && + g = 0 ,
(6.30)
qui est de la forme (6.6) avec a = l et c = g , et se met prfrentiellement sous la forme
&& + 2 = 0 ,
(6.31-a)
0
0 = g l .
Chapitre 6 : Vibrations - Oscillateur harmonique
Remarques.
9 Le choix = 2 aurait conduit A = + & 0 0 , dont les reports dans l'quation (6.32)
donnent
(t ) = +
et aux conditions initiales
(6.32)
les constantes A et tant dtermines par les conditions initiales (6.31-c).
t=0 ,
(6.33)
permet d'exprimer les conditions initiales (6.31-c) sous la forme :
(0) = 0 = A cos ,
t=0 ,
& (0) = & = A sin .
0
0
(6.34-a)
(6.34-b)
(6.35-b)
ce qui conduit finalement
(t ) =
Catherine Potel
& 0
0
cos 0 t + 2 =
- 6.7 -
& 0
0
sin 0 t .
(0) = 0 = A 2 sin ,
& (0) = & = A cos .
0
2 0
(6.38-a)
(6.38-b)
(6.37-a)
L'quation (6.38-a) conduit
- soit A 2 = 0 (solution physiquement inintressante puisque conduisant (t ) = 0 , t ),
2 =0
(6.39-a)
et son report dans l'quation (6.38-b) conduisent
A 2 = & 0 0 ,
(6.39-b)
& 0
0
sin 0 t ,
(6.40)
qui n'est autre que la solution (6.36).
9 De mme que prcdemment, le choix 2 = aurait conduit A 2 = & 0 0 , dont les
reports dans l'quation (6.37-a) donnent
& 0
& 0
(t ) =
sin 0 t =
sin 0 t ,
0
0
L'quation (6.34-a) conduit
- soit A = 0 (solution physiquement inintressante puisque conduisant (t ) = 0 , t ),
- soit = 2 () .
= 2
(6.35-a)
Le choix
et son report dans l'quation (6.34-b) conduisent
A = & 0 0 ,
sin 0 t ,
ce qui conduit finalement
L'usage de l'quation (6.32) et de la drive par rapport au temps
& (t ) = A 0 sin 0 t + ,
(6.37-b)
(t ) =
& 0
(t ) = A 2 sin 0 t + 2
& (t ) = A 2 0 cos 0 t + 2 ,
- soit 2 = 0 () .
Le choix
Solution de l'quation du mouvement linarise (problme 6.31)
D'aprs l'quation (6.10), la solution de l'quation du mouvement (6.31-a) s'crit
(t ) = A cos 0 t + ,
cos 0 t 2 =
9 Le choix de la solution (6.12-b)
conduit
En rsum, le problme rsoudre (problme bien pos) comprend la fois l'quation du
mouvement et les conditions initiales, soit
(6.31-a)
&& + 2 = 0 , t 0 ,
0
&
&
(6.31-c)
(0) = 0 , (0) = 0 , t = 0 .
& 0
rsultat identique l'expression (6.36).
(6.31-b)
L'quation du mouvement (6.31-a) est dite linarise.
DEUST VAS1
rsultat identique l'expression (6.40).
Conclusion.
Le choix de la forme de la solution n'est qu'une question d'habitude et ne change bien
videmment pas le rsultat final, puisque le problme bien pos (6.31) a une solution unique).
(6.36)
Universit du Maine - Le Mans
Catherine Potel
- 6.8 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
4.
Ressort horizontal
M
l0
Un ressort linaire de masse
ngligeable, de raideur k et de
longueur libre l 0 est attach
l'une de ses extrmits, au point
O , un bti (figure 6.4). La
position d'une masselotte de
masse m, attache son autre
extrmit M et suppose
ponctuelle en ce point, est
repre par son abscisse x(t).
Cette masselotte peut se
dplacer sans frottements sur
un plan horizontal (non
reprsent).
a)
x
M
T
O
x (t)
M
O
x (t)
b)
l0
c)
l0
Figure 6.4 : Systme masse / ressort horizontal. Ressort a)
ni tendu ni comprim, b) tendu, c) comprim
A l'instant t = 0 , la masselotte
est carte d'une distance a
vers la droite ( a > 0 ) et lche
sans vitesse initiale.
Au cours du temps, la masselotte oscille de part et d'autre de sa position l'quilibre, ce qui
tire ou comprime le ressort.
L'action d'un ressort linaire sur un objet est de la forme (voir chapitre 3, III.1)
r
r
T = k x l 0 e x ,
(figure 6.4).
Il convient de noter que le signe - devant k au second membre de l'quation (6.41)
est toujours prsent, que le ressort soit en traction ou en compression.
Ainsi, dans le cas de la figure 6.4-b, le ressort est tir, x l 0 > 0 , donc k x l 0 < 0 , et
r
r
T = k x l 0 e x est bien dirig vers la gauche. Dans le cas de la figure 6.4-c, le ressort est
r
r
comprim, x l 0 < 0 , donc k x l 0 > 0 , et T = k x l 0 e x est bien dirig vers la
droite.
Catherine Potel
Inventaire des forces :
r
- Action de la gravit : { M} = M, P , avec
r
r
P = m g e y .
(6.43)
r
r
- Action du ressort : {ressort M} = M, T , avec l'action T donne par l'quation
- 6.9 -
Universit du Maine - Le Mans
(6.41)
r
r
T = k x l 0 e x .
r
- Action du plan : {plan M} = M, N , avec
r
r
N = N e y et N > 0 .
(6.41)
(6.44)
La rsultante des actions mcaniques est donc
r r r
R (ext M ) = P + T + N ,
soit
k x l 0
R (ext M ) =
B
(6.45-a)
mg + N
0
(6.45-b)
Rsultante dynamique :
r r r
x Le vecteur position OM est donn par ses composantes sur la base B = e x , e y , e z :
r
OM = x e x .
(6.46)
x La vitesse du point M par rapport au repre R = (O,B ) s'crit
soit
(6.41)
o k est la raideur du ressort (exprime en N.m 1 ) et l 0 est sa longueur libre (ou vide)
DEUST VAS1
ex
Chapitre 6 : Vibrations - Oscillateur harmonique
Systme tudi : { le point M }.
Cas important du ressort linaire
a)
DEUST VAS1
r
d OM
,
V(M / R ) =
dt
/B
r
r
V(M / R ) = x& e x .
(6.47-a)
(6.47-b)
x L'acclration du point M par rapport au repre R s'crit
r
r
d V(M / R )
,
(M / R ) =
dt
/B
r
r
soit
(M / R ) = &x& e x .
(6.48-a)
(6.48-b)
x La rsultante dynamique du point M par rapport au repre R s'crit donc :
r
r
d M / R 0 = m &x& e x .
PFD pour le point matriel
r
R (ext M ) = d M / R 0
r
r
soit, en projection sur e x et sur e y ,
Catherine Potel
- 6.10 -
(6.49)
(6.50)
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
k x l 0 = m &x& ,
mg + N = 0 .
(6.51-a)
(6.51-b)
L'quation du mouvement (6.51-b) s'crit encore
m &x& + k x l 0 = 0 .
Remarquons tout d'abord qu' l'quilibre, l'quation (6.52) s'crit, pour x = x 0 (position
k
M
x0=l0
position d'quilibre
x (t)
X = xx0
M
T
x0
D'aprs l'quation (6.10), la solution de l'quation du mouvement (6.56-a) s'crit
X(t ) = A cos 0 t + ,
Le changement de variable
X (t)
va permettre d'exprimer l'quation du
mouvement (6.52) en fonction de la
variable X(t ) dont l'origine est la
position d'quilibre x 0 du systme
tudi (figure 6.5), et ainsi obtenir
une quation sans second membre.
Figure 6.5
&& dans l'quation du
Le report de x = X + x 0 = X + l 0 et de sa drive seconde &x& = X
mouvement (6.52) permet d'obtenir finalement
&& + k X = 0 ,
mX
(6.55)
crite prfrentiellement sous la forme
&& + 2 X = 0 ,
X
0
0 =
(6.57)
(6.54)
Cette mthode sera systmatiquement employe par la suite.
avec
les constantes A et tant dtermines par les conditions initiales (6.56-c).
En rsum, le problme rsoudre (problme bien pos) comprend la fois l'quation du
mouvement et les conditions initiales, soit
(6.56-a)
X
&& + 2 X = 0 , t 0 ,
0
&
X(0) = a , X(0) = 0 , t = 0 .
(6.56-c)
(6.53)
ex
oscillant sous l'effet du vent par exemple). Une modlisation plus fine consisterait modliser
un tel systme avec un ensemble de masses rparties, ce qui augmenterait le nombre de degrs
de libert, et sort du cadre de ce cours.
Solution de l'quation du mouvement (problme 6.56)
x0 =l0 .
y
z
DEUST VAS1
(6.52)
Ecrite sous la forme (6.52), l'quation du mouvement n'est plus de la forme (6.6), soit
a &x& + c x = 0 , puisqu'il y a ici un second membre : m &x& + k x = k l 0 .
d'quilibre) et donc pour &x& = 0 ,
Chapitre 6 : Vibrations - Oscillateur harmonique
k
,
m
(6.56-a)
L'usage de l'quation (6.57) et de la drive par rapport au temps
& (t ) = A sin t + ,
X
0
0
(6.58)
permet d'exprimer les conditions initiales (6.56-c) sous la forme :
X(0) = a = A cos ,
t=0 ,
X
&
(0) = 0 = A 0 sin .
(6.59-a)
(6.59-b)
L'quation (6.59-b) conduit
- soit A = 0 (solution physiquement inintressante puisque conduisant X(t ) = 0 , t ),
- soit = 0 () .
=0
(6.60-a)
Le choix
et son report dans l'quation (6.59-a) conduisent
A=a ,
ce qui conduit finalement
(6.60-b)
X(t ) = a cos 0 t ,
(6.61-a)
soit, en faisant usage de la relation (6.54),
x (t ) = X(t ) + l 0 = l 0 + a cos 0 t .
(6.61-b)
(6.56-b)
pulsation propre du systme.
Ainsi, par exemple, si la masse m augmente, la pulsation propre 0 diminue. Il convient de
Remarque.
Le choix = aurait conduit A = a , dont les reports dans l'quation (6.57) donnent
X(t ) = a cos 0 t + = a cos 0 t ,
rsultat identique l'expression (6.61-a).
noter qu'il existe dans la nature bon nombre de systmes dont les comportements
s'apparentent en premire approximation des systmes 1 degr de libert (branche d'arbre
Catherine Potel
- 6.11 -
Universit du Maine - Le Mans
Catherine Potel
- 6.12 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
b)
DEUST VAS1
Ressort vertical
ex
x (t)
l0
x0
M
a)
position
d'quilibre
b)
X (t)
c)
Figure 6.6 : Systme masse / ressort vertical a) ressort
seul ni tendu ni comprim, b) systme l'quilibre, c)
systme au cours de son mouvement
Un
ressort
de
masse
ngligeable, de raideur k et de
longueur libre l 0 est suspendu
par son extrmit O un point
fixe d'un bti, origine d'un axe
vertical dirig vers le bas,
comme le montre la figure 6.6.
La position d'une masselotte de
masse m, attache son autre
extrmit M et suppose
ponctuelle en ce point, est
repre par son abscisse x(t).
A l'instant t = 0 , la masselotte
est carte d'une distance a
vers le bas ( a > 0 ) et lche
sans vitesse initiale.
De manire gnrale, l'tude des vibrations d'un systme commence souvent par la recherche
de la position d'quilibre, ce qui permet ensuite d'effectuer un changement de variable, pour
tudier le mouvement du systme autour de la position d'quilibre. Avec l'habitude, les
quations sont souvent crites de manire systmatique.
i)
Recherche de la position d'quilibre x 0
Chapitre 6 : Vibrations - Oscillateur harmonique
Principe Fondamental de la statique :
r
R (ext M ) = 0
soit
mg k x 0 l 0 = 0 ;
d'o
ii)
x0 =l0+
mg
.
k
(6.65)
(6.66)
Equation du mouvement
Systme tudi : { le point M }.
Inventaire des forces :
r
- Action de la gravit : { M} = M, P , avec
r
r
P = mge x .
(6.67)
r
r
- Action du ressort : {ressort M} = M, T , avec l'action T donne par l'quation
(6.41)
r
r
T = k x l 0 e x .
(6.68)
La rsultante des actions mcaniques est donc
r r
R (ext M ) = P + T ,
soit
(6.68-a)
)]
r
R (ext M ) = m g k x l 0 e x .
(6.68-b)
Inventaire des forces :
r
- Action de la gravit : { M} = M, P , avec
r
r
P = mge x .
(6.62)
r
r
- Action du ressort : {ressort M} = M, T , avec l'action T donne par l'quation
(6.41) pour la position d'quilibre x = x 0
r
r
T = k x 0 l 0 e x .
(6.63)
)]
(6.64-a)
r
R (ext M ) = m g k x 0 l 0 e x .
(6.70)
x La rsultante dynamique du point M par rapport au repre R s'crit donc :
r
r
d M / R 0 = m &x& e x .
(6.71)
r
soit, en projection sur e x ,
Universit du Maine - Le Mans
r
R (ext M ) = d M / R 0
(6.72)
m g k x l 0 = m &x& ,
(6.64-b)
d'o
- 6.13 -
x et l'acclration du point M par rapport au repre R s'crit
r
r
(M / R ) = &x& e x .
PFD pour le point matriel
La rsultante des actions mcaniques est donc
r r
R (ext M ) = P + T ,
Catherine Potel
Rsultante dynamique :
r r r
x Le vecteur position OM est donn par ses composantes sur la base B = e x , e y , e z :
r
OM = x e x ,
(6.69)
Systme tudi : { le point M }.
soit
DEUST VAS1
Catherine Potel
m &x& + k x = m g + k l 0 .
- 6.14 -
(6.73)
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
De mme que prcdemment, crite sous la forme (6.73), l'quation du mouvement n'est plus
de la forme (6.6), soit a &x& + c x = 0 , puisqu'il y a ici un second membre.
X = xx0
Le changement de variable
(6.74)
va permettre d'exprimer l'quation du mouvement (6.73) en fonction d'une variable dont
l'origine est la position l'quilibre x 0 .
Chapitre 6 : Vibrations - Oscillateur harmonique
Par anticipation sur le cours de mcanique du solide de VAS2, l'application du Principe
Fondamental de la Dynamique au solide S pour les moments au point O conduit
r
M O (ext S) e z 0 = C && ,
(6.77)
bg
o M O (ext S) est le moment au point O du torseur des actions mcaniques extrieures
r
s'exerant sur le solide S et C est le moment d'inertie de S par rapport O, e z 0 (unit
bg
(6.75)
r
ez
0 =
avec
(6.76-a)
k
,
m
r
ey1
(6.76-b)
O
a
r
ex
r
ey
r
e x1
0
pulsation propre du systme.
Avec l'habitude, ce genre d'quation est crit de manire assez systmatique, mais il ne
faut pas oublier que l'quation diffrentielle du mouvement a la forme (6.75) uniquement
quand la grandeur caractristique X(t ) est rfrence par rapport la position d'quilibre.
5.
ex
ez
Figure 6.7
Catherine Potel
B0
O
(S)
Figure 6.8
position du centre de masse G est repre par l'axe
O y , faisant un angle avec l'axe O y 0 . Le repre
r r r
R 0 = O, e x 0 , e y 0 , e z 0
est galilen, le repre
r r r
R = O,B avec B = e x , e y , e z 0 est li au solide
brSg ,
et l'acclration de la pesanteur est telle que
r
g = g e y 0 .
- 6.15 -
Universit du Maine - Le Mans
Le moment dynamique est donn par
r
r
O M / R 0 = m a 2 && e z 0
(6.78-a)
et le moment au point O du torseur des
actions mcaniques extrieures par
r
M O (ext M ) = m g a sin e z 0 , (6.78-b)
ce qui conduit
x1
m g a sin = m a 2 && ,
(6.79)
la quantit m a 2 , caractristique de la
rpartition de masse du systme, tant appele
moment d'inertie du point M par rapport
r
l'axe O, e z 0
Lorsque le solide tudi n'est pas un point matriel, le moment d'inertie n'est plus simplement
le produit de la masse du point M par le carr de la distance au carr entre le point M et
l'axe de rotation (voir I.6).
Dfinition : on appelle pendule compos le systme oscillant form par un objet solide
quelconque, susceptible d'osciller sous le seul effet de son poids autour d'un axe fixe
schmatisant une liaison pivot parfaite (sans frottements).
bg
Le solide S de la figure 6.7 est en liaison pivot sans
frottements avec un bti (non reprsent) d'axe
r
O, e z 0 , ce qui le met en rotation autour de cet axe. La
y1
y0
x0
Cas particulier de la rotation autour d'un axe fixe
ey
En rsum, le problme rsoudre (problme bien pos) comprend la fois l'quation du
mouvement et les conditions initiales, soit
(6.76-a)
X
&& + 2 X = 0 , t 0 ,
0
& (0) = 0 , t = 0 .
X(0) = a , X
(6.76-c)
Ce genre d'quation a dj t obtenu au
Chapitre 4, III/2, lors de l'tude du pendule
circulaire pour un point matriel M
(figure 6.8).
crite prfrentiellement sous la forme
&& + 2 X = 0
X
0
bg
kg.m 2 ).
&& dans l'quation du
Le report de x = X + x 0 = X + l 0 + m g k et de sa drive seconde &x& = X
mouvement (6.73) permet d'obtenir finalement
&& + k X = 0 ,
mX
DEUST VAS1
Le torseur des actions extrieures est donc la somme du torseur des actions de la gravit
{ S} et du torseur des actions du bti {bti S},
{ext S} = { S} + {bti S} .
soit
(6.80)
En posant OG = a (figure 6.7), le moment au point O des actions mcanique extrieures
s'crit
Catherine Potel
r
M O {ext S} = OG P + M O {bti S} ,
- 6.16 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
soit
DEUST VAS1
Chapitre 6 : Vibrations - Oscillateur harmonique
L
0
L
0
asin
acos
mg +
+
M O {ext S} =
M ,
0
M=
B0
B0 0
B 0 0 B 0 mgasin B 0 0
0
crite prfrentiellement sous la forme
&& + 2 = 0 ,
0
(6.83-a)
mga
.
C
(6.83-b)
ez
Figure 6.10-a)
(6.81)
Dans le cas des petites oscillations (approximation harmonique), sin , et l'quation
(6.81) devient
C && + m g a = 0 ,
(6.82)
0 =
ez
d'o, en faisant usage de l'quation (6.77),
m g a sin = C && ,
C && + m g a sin = 0 .
soit
avec
DEUST VAS1
Figure 6.10-b)
Si l'on veut faire tourner chacun des deux systmes, l'exprience montre qu'il faudra dpenser
beaucoup plus d'nergie pour communiquer une vitesse de rotation donne au systme c
(figure 6.10-a) qu'au systme d (figure 6.10-b), alors que chacun des deux systmes a la
mme masse.
On peut donc en conclure que la distance de la masse par rapport l'axe est un lment
important dans l'tude de la dynamique des systmes.
Moment d'inertie par rapport une droite
b)
L'quation (6.83) est savoir retrouver et non apprendre par coeur !
En rsum, le problme rsoudre (problme bien pos) comprend la fois l'quation du
mouvement et les conditions initiales, soit
(6.83-a)
&& + 2 = 0 , t 0 ,
0
(6.83-c)
(0) = 0 , & (0 ) = & 0 , t = 0 .
d2
d1
A1
A2
bg
()
di
Soit une droite (figure 6.11). Si l'on dsigne par d i les
distances des points A i du solide S par rapport , on
bg
bg
bg
bg
dfinit le moment d'inertie de S par rapport par :
Ai
bg
I S = m i d 2i
Figure 6.11
(6.84)
6.
Dans le cas d'une seule masse (figure 6.8), I Oz 0 (S) = m a 2 .
Calcul de moments d'inertie
Remarques :
Ce paragraphe est trait par anticipation sur le cours de mcanique du solide.
a)
Un moment d'inertie est toujours positif.
Dimension : I = M L 2 unit : kg. m 2 .
Introduction
r r r
Soit K un point quelconque. On considre la base B = e x , e y , e z
ez
Le solide de la figure 6.9 est constitu d'un disque de grand
diamtre et d'un axe de plus faible diamtre, le tout pouvant tourner
r
autour de e z .
est
Figure 6.9
On considre quatre anneaux identiques (donc de mme masse), que l'on dispose de deux
manires diffrentes (figure 6.10) ; sur la figure 6.10-a), ils sont colls sur la face avant du
disque, et sur la figure 6.10-b), ils sont fixs sur l'axe du disque.
Catherine Potel
- 6.17 -
Universit du Maine - Le Mans
bg
i associe au repre
R = K,B , ce repre n'tant pas ncessairement li S . Par habitude, lorsque la droite ( )
(
(
(
)
)
)
r
- l'axe K, e x , le moment d'inertie
r
- l'axe K, e y , le moment d'inertie
r
- l'axe K, e z , le moment d'inertie
I (S) est not A ,
I (S) est not B ,
I (S) est not C .
- On pourra se reporter au tableau de la figure 6.12 pour connatre les lments d'inertie en un
point O , et les centres de masse de quelques solides homognes.
Catherine Potel
- 6.18 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
Thorme de Huygens : Le moment d'inertie d'un solide par
rapport une droite est gal la somme du moment
d'inertie par rapport cette droite de la masse du solide
concentre au centre de masse G et du moment d'inertie du
solide par rapport la droite parallle passant par G .
()
( G )
Figure 6.13
bg
md
y1
Centre O
(6.85)
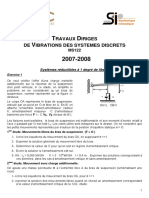
Le systme de la figure 6.14 est constitu d'une tige pesante
homogne S de masse m de longueur l . Le centre de masse G
est donc situ une distance l 2 du point O. La tige est en
r
liaison pivot sans frottements d'axe O, e z 0 avec le bti. La
y0
z0
position de la tige est repre par l'axe O x 1 , faisant un angle
x1
avec l'axe O x 0 (figure 6.14).
- D'aprs le tableau 6.12, et avec les notations employes dans
ce tableau (figure 6.15),
1
I Ox = I Oy = Ml 2.
(6.86)
12
Figure 6.15
- Dans le cas prsent, et avec les notations employes (figure 6.14), le moment d'inertie par
rapport l'axe G z 0 , not I G z 0 s'crit, en faisant usage de la relation (6.86)
Cne creux
Boule (pleine)
Sphre (creuse)
Paralllpipde rectangle
Centre O
Centre O
Exemple.
Cylindre plein
(figure 6.13)
Figure 6.14
Centre O
o G est la droite parallle et passant par G , et d est la distance entre et G
x0
cylindre creux
bg
I S = I G S + I m, G
1424
3
Centre O
DEUST VAS1
Thorme de Huygens pour les moments d'inertie
d
N.B. : les solides "creux" sont supposs d'paisseur ngligeable.
Tore creux
On remarquera qu'il est possible de dduire de ce tableau d'autres rsultats : Ainsi la
tige s'obtient en faisant
dans le cylindre plein, la plaque en faisant
dans le
paralllpipde rectangle, etc...
Secteur circulaire
Demi-sphre (creuse)
Quart de cercle matriel
Quart de plaque elliptique
Centre O
Centre de masse G
Solide homogne de masse M
d)
Elments d'inertie
Centre de masse et lments d'inertie au point O de quelques solides homognes usuels
Centre de masse G
Solide homogne de masse M
Chapitre 6 : Vibrations - Oscillateur harmonique
Elments d'inertie de quelques solides homognes usuels
Elments d'inertie
c)
DEUST VAS1
1
I Gz0 = ml 2 .
(6.87)
12
r
et O, e z 0 tant gale l 2 , le moment d'inertie par
) (
r
La distance entre les axes G, e z 0
r
rapport l'axe O, e z 0 s'crit, par usage du thorme de Huygens (6.85)
l 2 ml 2
1
l
=
,
I Oz 0 = I Gz 0 + m = ml 2 + m
12
4
3
2
Figure 6.12
(6.88)
quantit note C .
!
Lorsque l'on cherche un lment d'inertie en un autre point que le point O , il faut utiliser
le thorme de Huygens ( II.6.d).
Catherine Potel
- 6.19 -
Universit du Maine - Le Mans
L'usage de la relation (6.77) permet alors d'crire
r
m l 2 &&
M O {ext S} e z 0 =
.
3
Catherine Potel
- 6.20 -
(6.89)
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
7.
DEUST VAS1
b)
Le ressort spiral et le fil de torsion
Le ressort spiral et le fil de torsion sont deux exemples de pices mcaniques pouvant exercer
un moment de rappel (communment appel couple de rappel et not C ) sur le systme
auquel ils sont lis, fonction de l'angle de rotation autour d'un axe de rotation. Ils sont
caractriss par une constante de torsion, pouvant tre appele raideur (par analogie avec la
raideur des ressorts en translation tudis jusqu' prsent dans ce cours) et note K .
a)
r
ez
Chapitre 6 : Vibrations - Oscillateur harmonique
Le ressort spiral
O
0
Figure 6.16-a
Le fil de torsion
Le fil de torsion quant lui est un fil rectiligne pouvant tre contraint en
r
rotation autour de son axe e z 0 (torsion). Sa raideur K (en N.m.rad 1 )
est donne par
K =GIO l ,
matriau constituant le fil, le moment polaire de la section droite
( I O = D 4 32 pour une section circulaire de diamtre D ) et la longueur
0
Figure 6.17
c)
Figure 6.16-c : Ralisation du mcanisme de la
premire montre ressort spiral (tel qu'imagin par
Huygens) par Isaac Thuret, l'un des meilleurs
horlogers de Paris, en 1675.
http://www.louisg.net/mesure_temps5.htm
Sa raideur K (en N.m.rad 1 et non en N.m 1 comme dans le cas des ressorts en translation
prcdemment tudis) est donne par
K = EIq l ,
(6.90)
o E , I q et l dsignent respectivement le module d'Young du matriau constituant le
ressort, le moment quadratique de la section droite ( I q = D 4 64 pour une section circulaire
de diamtre D et I q = b h 3 12 pour une section rectangulaire de largeur b et d'paisseur h )
et la longueur du ressort.
Catherine Potel
- 6.21 -
Universit du Maine - Le Mans
du fil.
Couple de rappel
Dans la suite, le terme "ressort" ou "ressort spiral" dsigne indiffremment le ressort spiral ou
le fil de torsion.
Dans les deux cas, si 0 dsigne l'angle au repos de la torsion (libre de toute contrainte), la
r
torsion d'un angle autour de l'axe (O, e z 0 ) provoque un couple de rappel C
r
(correspondant la projection sur le vecteur e z 0 de l'action du ressort sur le systme auquel
il est li) tel que
Figure 6.16-b : Balancier avec
ressort spiral. Gravure extraite de
PRIVAT-DESCHANEL et
FOCILLON, Dictionnaire gnral
des sciences techniques et
appliques, 1883
(6.91)
o G , I O et l dsignent respectivement le module de Coulomb du
r
ez
La figure 6.16-a reprsente un ressort spiral. Essentiellement
utilis dans l'appareillage de prcision (montres, appareils
lectriques, ...) et invent par Christiaan Huygens (16291695) en 1675 (figures 6.16-b et c), un ressort spiral est
compos d'un ruban de section rectangulaire ou circulaire,
encastr une extrmit B et solidaire l'autre extrmit O
r
d'un axe (O, e z 0 ) perpendiculaire au plan d'enroulement.
DEUST VAS1
r
C = M O (ressort systme) e z 0 = K 0
(6.92)
Il convient de bien noter l'analogie de l'expression (6.92) du couple de rappel avec
l'expression (6.41) de l'action d'un ressort en translation de raideur k et de longueur vide
l 0 sur un systme :
r
R (ressort systme) = k x l 0 e x .
(6.93)
Si le ressort spiral est de masse ngligeable par rapport aux systmes auxquels il est li, sa
fonction se rduit transmettre les efforts mcaniques, notamment son couple de rappel.
d)
Exemple de mise en quation d'un problme
Le systme de la figure 6.18-a est constitu d'une tige 1 sans masse, en liaison avec un bti 0
r
par l'intermdiaire d'une liaison pivot sans frottement d'axe O, e z 0 , son axe de rotation tant
soumis au couple de rappel d'un ressort spiral ou d'un fil de torsion de constante de torsion K
(suppos sans masse). Le torseur des actions du bti 0 sur la tige 1 peut donc s'crire :
Catherine Potel
- 6.22 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
{0 1} =
DEUST VAS1
X O
YO
O ZO
LO
MO
C B
1
Chapitre 6 : Vibrations - Oscillateur harmonique
- Action du bti : {0 1} =
(6.94)
XO
YO
O ZO
DEUST VAS1
LO
MO
C B
1
o C est le couple de rappel exerc par le ressort sur la tige.
z0
On introduit les repres suivants :
r r r
- repre fixe R 0 = O, e x 0 , e y 0 , e z 0 = O,B0 li au bti 0, et
y1
y0
O
1
j c
suppos galilen.
r r r
- repre R1 = O, e x 1 , e y 1 , e z 0 = O,B1 li la tige 1.
j c
r
Au repos, la tige 1 fait un angle 0 avec l'axe e x 0 et l'ensemble
r
r
est soumis au champ de pesanteur terrestre g = g e x 0 .
Moment au point O des actions mcaniques extrieures exerces sur le systme
M O (ext ) = M O ( ) + M O (bti ) ,
(6.97-a)
a
m g cos
LO
r
0
m g sin +
MO ,
soit M O (ext ) = O M P + M O (bti ) =
0
B1 0 B1
B1 C
M O (ext ) =
d'o
LO
MO
.
B 1 m g a sin + C
(6.97-b)
x1
x0
Figure 6.18-a
Le couple de rappel C exerc par le ressort spiral sur la tige lorsque celle-ci est carte d'un
r r
angle orient = e x 0 , e x 1 est donn par
C = K 0
Principe Fondamental de la statique
r
M O (ext ) = 0
(6.98-a)
r
soit, en projection sur l'axe e z 0 et en reportant l'expression (6.95) du couple de rappel C
pour = 1 ,
z0
d'o
y1
y0
O
1
a
1
M
bille
Une bille de masse m, assimile une masse ponctuelle, est
maintenant fixe l'extrmit M de la tige c, situe une
distance "a" de son autre extrmit O (figure 6.18-b). On note
l'ensemble constitu de la tige c et de la bille. A l'quilibre,
r
la tige OM fait un angle 1 avec l'axe O, e x 0 .
x1
x0
Figure 6.18-b
comprime le ressort spiral ce qui rapproche la tige de la verticale.
Principe Fondamental de la dynamique
L'usage de l'quation (6.77) provenant de l'application du PFD pour les moments au point O
conduit , lorsque la tige est carte d'un angle de l'axe O x 0 ,
r
M O (ext ) e z 0 = m a 2 && ,
(6.99)
- 6.23 -
(6.98-b)
Il convient de noter que, d'aprs l'quation (6.98-b), 1 0 < 0 . La position d'quilibre a
donc lieu pour 1 < 0 , du fait que l'action de la gravit sur la bille exerce une action qui
l'quation du mouvement s'crit
Universit du Maine - Le Mans
m a 2 && = m g a sin K 0 ,
(6.96)
soit
Catherine Potel
o m a 2 reprsente le moment d'inertie de la masse ponctuelle m par rapport l'axe
r
O, e z 0 . Par suite, en reportant les quations (6.97-b) et (6.95) dans l'quation (6.99),
Systme tudi : le systme constitu de la tige 1 et de la bille.
Inventaire des actions mcaniques extrieures :
r
- Action de la gravit : { M} = M, P , avec
r
r
P = mge x 0 .
m g a sin 1 K 1 0 = 0 ;
mga
1 0 =
sin 1 .
K
(6.95)
Catherine Potel
m a 2 && + m g a sin + K 0 = 0 .
- 6.24 -
(6.100)
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
Etude des petits mouvements autour de la position d'quilibre = 1
e)
Le changement de variable
= 1
(6.101)
et un dveloppement limit de la fonction sin autour de = 1 vont permettre d'exprimer
l'quation du mouvement (6.100) en fonction d'une variable dont l'origine est la position
l'quilibre.
&& dans l'quation du mouvement
Le report de = + 1 et de sa drive seconde && =
(6.100) permet d'crire
) (
&& + m g a sin + + K + = 0 ,
ma 2
1
1
0
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
Pendule de Pohl
Un pendule de Pohl est un oscillateur harmonique constitu d'un disque en rotation autour de
son centre, reli un ressort spiral qui tend ramener le disque vers sa position d'quilibre.
Le dispositif de la figure 6.19 (distribu par la socit Leybold Didactic GmbH) comporte
ainsi un pointeur plac sur le disque qui permet de suivre les oscillations et de mesurer les
amplitudes, d'un petit moteur reli au ressort spiral qui impose une excitation sinusodale et
force ainsi les oscillations une frquence ajustable par l'utilisateur, et d'un frein
lectromagntique permettant de rgler l'effet d'amortissement (par courants de Foucault).
(6.102-a)
soit, en reportant l'expression (6.98-b) de 1 0
&& + m g a sin + + K m g a sin = 0 .
ma 2
1
1
K
(6.102-b)
Le dveloppement l'ordre 1 de sin 1 + s'crit, en appliquant la formule de Taylor
) ( ) ( ) h2 f " (x 0 )+ K
sin ( 1 + ) sin 1 + cos 1 ,
f x 0 +h = f x 0 +hf x 0 +
(6.103-a)
(6.103-b)
et son report dans l'quation (6.102-b) conduisent
&& + m g a cos + K = 0 ,
ma 2
1
soit
o
&& + 2 = 0 ,
0
0 =
(6.104-a)
m g a cos 1 + K
ma 2
(6.104-b)
Nota Bene 1. Mme en crivant l'quation du mouvement en fonction d'une variable dont
l'origine est la position l'quilibre = 1 , contrairement au cas des oscillateurs tudis
jusqu' prsent, l'angle 1 intervient encore dans l'quation du mouvement.
Nota Bene 2. Si 0 = 0 , l'quation (6.98-b) s'crit
mga
(6.105)
sin 1 < 0 ,
K
alors que 1 0 . Par suite, si 0 = 0 , alors 1 = 0 , et la pulsation propre s'crit alors
1 =
0 =
Catherine Potel
mga + K
ma 2
- 6.25 -
(6.106)
Universit du Maine - Le Mans
Figure 6.19 : Pendule de Pohl distribu par la socit Leybold Didactic GmbH.
http://www.leybold-didactic.de ; http://fr.wikipedia.org/wiki/Pendule_de_Pohl
1. Echelle circulaire.
2. Corps du pendule : index pour la dviation (2a), index pour la position de phase (2b),
ressort spiral (2c).
3. Excitateur : index pour la position de phase de lexcitateur (3a), fente (3b), vis (3c), barre
de pousse (3d), poulie avec excentrique (3e).
4. Electroaimant pour frein courants de Foucault. Douilles de connexion (4a).
5. Moteur de lexcitateur.
Catherine Potel
- 6.26 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
8.
DEUST VAS1
Reprsentation de l'oscillateur harmonique non amorti dans le plan des phases
Il est possible de reprsenter les oscillations du systme dans le plan des phases, c'est--dire
dans un repre dont l'axe des abscisses est l'longation x , et l'axe des ordonnes est sa drive
x& par rapport au temps t (ou et & ).
Exemple : Systme masse-ressort horizontal tudi au II.4-a)
x0=l0
La solution (6.57) de l'quation du mouvement
M
O
(6.56-a) s'crit
0
x
x (t)
X(t ) = A cos 0 t +
(6.107-a)
X (t)
Figure 6.20
et sa drive par rapport au temps
& (t ) = A sin t + . (6.107-b)
X
0
0
2
& 2
X
X
= 1 ,
(6.108)
+
A
A 0
quation d'une ellipse de demi-grand-axe A et de demi-petit axe A 0 (figure 6.20). Il en
Par suite,
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
& (0) = 0 , ce qui correspond au point B .
- A t = 0 , X(0 ) = A et X
& (t ) = A , ce qui correspond au point C .
- A 0 t = 2 , X(t ) = 0 et X
0
&
- A 0 t = , X(t ) = A et X(t ) = 0 , ce qui correspond au point D .
- Etc.
L'intrt des reprsentations dans le plan des phases est d'obtenir un comportement qualitatif
sur le systme tudi, par comparaison avec le cas o le systme est amorti.
Ce type de reprsentation offre en particulier l'avantage de reprsenter la position en fonction
de la vitesse, deux grandeurs devant tre dfinies pour connatre l'tat d'un systme.
III
OSCILLATIONS LINEAIRES LIBRES AMORTIES
L'oscillateur est abandonn lui-mme et est soumis un amortissement d l'existence
d'une force de frottement fluide. Cette force de frottement dissipe l'nergie mcanique sous
forme de chaleur.
rsulte donc, pour l'ensemble des conditions initiales (pour un systme masse-ressort donn),
une famille d'ellipses concentriques, dcrites dans le sens des aiguilles d'une montre lorsque le
temps t augmente (figure 6.20). Par suite, la connaissance d'une seule grandeur, l'amplitude
A , permet de savoir sur quelle ellipse se dplace le point reprsentatif du systme dans le
plan des phases.
9 L'quation du mouvement, comme on va le voir dans la suite de ce , est de la forme
a &x& + b x& + c x = 0 ,
(6.109)
Forme de l'quation du mouvement
que l'on crit prfrentiellement
Si la courbe ainsi obtenue est ferme, le mouvement est priodique. On verra en particulier
que, pour les oscillateurs libres amortis, la courbe n'est plus ferme (voir III.5).
.
X
&x& + 2 x& + 02 x = 0 ,
(6.110)
o b est un facteur d'amortissement positif,
|A| 0
0 =
c
a
(6.111)
est la pulsation propre (ou pulsation naturelle) des oscillations libres non amorties,
D
-|A|
|A|
et
b
2a
(6.112)
caractrise l'amortissement (en s 1 ).
C -|A| 0
Il convient de noter que la terminologie en ce qui concerne l'amortissement n'est pas bien
dfinie et que les grandeurs b et sont des grandeurs caractrisant toutes deux
Figure 6.21
l'amortissement sans qu'une dnomination prcise leur soit associe.
Pour se convaincre du sens de parcours des ellipses, il suffit, pour simplifier, de prendre
= 0 et A > 0 dans les quations (6.107).
Catherine Potel
- 6.27 -
Universit du Maine - Le Mans
Catherine Potel
- 6.28 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
1er exemple : systme masse-ressort amorti
Chapitre 6 : Vibrations - Oscillateur harmonique
r+ =0 ,
r 2 + 2 r + 2 = 0 .
ou
r
La force de frottement visqueux est de la forme x& e x , ce qui conduit
l'quation :
m &x& + x& + k x = 0 ,
o le facteur d'amortissement a pour dimension [ ] = M T 1 et pour unit
(6.113)
=
,
2m
Figure 6.22
(6.114)
et pour unit s 1 .
9 Le report de x b (t ) et de ses drives successives par rapport au temps x& b (t ) = B r e r t et
l'quation :
&x& b (t ) = B r 2 e r t dans l'quation (6.110) conduit
C && + & + m g a = 0 ,
(6.115)
soit
expression
ou
=
,
2C
(6.116)
et pour unit s 1 .
La rsolution de l'quation (6.110) s'obtient en cherchant des solutions indpendantes x a et
x b de la forme x a (t ) = A t e r t et x b (t ) = B e r t .
x a (t ) et de ses drives successives par rapport au temps
x& a (t ) = A (1 + r t ) e r t et &x& a (t ) = A [ r + (1 + r t ) r ]e r t dans l'quation (6.110) conduit
) ]e
A 2 (r + ) + r 2 + 2 r + 02 t
Catherine Potel
+ 2 r + 02 = 0
(6.119-a)
,
(6.119-b)
qui n'est autre que l'quation caractristique (6.117-c) dj trouve.
caractristique, et donc calculer son discriminant rduit ' donn par l'quation (6.118).
Ce paragraphe ne remplace nullement le cours de mathmatiques consacr la rsolution
des quations diffrentielles du second ordre coefficients constants.
9 Le report de
B=0
2
La solution (6.119-a) tant physiquement inintressante puisque conduisant
x b (t ) = 0 , t 0 , il ne reste plus qu' rsoudre l'quation (6.119-b), appele quation
Rsolution mathmatique de l'quation
soit
B r 2 e r t + 2 B r e r t + 02 B e r t = 0 , t 0 ,
o le facteur d'amortissement a pour dimension [] = M L T et pour
unit associe N.s.m , et o le terme dfini par l'quation (6.112) a pour
Figure 6.23
revient crire r = et r 2 = 02 , c'est--dire r = = 0 .
conditions (6.117-b) et (6.117-c) sont satisfaites, c'est--dire si r = et si ' = 2 02 = 0 .
(6.118)
r
Le moment de frottement visqueux est de la forme & e z 0 , ce qui conduit
0
a
(S)
' = 2 02 ,
La solution x a (t ) = A t e r t est donc solution de l'quation (6.110) uniquement si les
2me exemple : pendule compos avec pivot rel
La rsolution de l'quation (6.117-c), appele quation caractristique, conduit calculer son
nul ici, puisque le report de la condition (6.117-b) dans l'quation caractristique (6.117-c)
expression
ez
(6.117-b)
(6.117-c)
discriminant rduit
associe N.s.m 1 , et o le terme dfini par l'quation (6.112) a pour
DEUST VAS1
A=0
- 6.29 -
rt
=0 , t0 ,
(6.117-a)
Universit du Maine - Le Mans
Lorsque le discriminant rduit ' = 2 02 = 0 , la solution de l'quation (6.119-b)
est donne par la racine double r = (ce qui correspond de plus aux conditions (6.117-b,c)),
et la solution gnrale de l'quation (6.110) est alors donne par la somme x a (t ) + x b (t ) .
Lorsque le discriminant rduit ' 0 , la solution de l'quation (6.119-b) est donne
par deux racines distinctes r1 et r 2 , et la solution gnrale de l'quation (6.110) est alors
e r1 t + B
e r 2 t (les conditions (6.117-b,c) ne sont alors plus
donne par la somme B
1
2
satisfaites et la fonction x a (t ) n'est pas solution).
Finalement, la recherche de la solution gnrale d'une quation diffrentielle du second ordre
coefficients constants telle que l'quation (6.110) conduit crire l'quation caractristique
(6.119-b) et en calculer son discriminant rduit (6.118), ce qui mne aux deux cas suivants.
Catherine Potel
- 6.30 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
a)
DEUST VAS1
Premier cas : ' = 0 c'est--dire = 0
soit
x (t ) = (A t + B) e
soit
x (t ) = (A t + B) e
o les constantes A et B dpendent des conditions initiales. Ce cas correspond au rgime
critique (voir 3 suivant).
b)
La solution x (t ) de l'quation (6.110), donne par son expression (6.122) s'crit finalement
e
x (t ) = e t B
1
(6.121)
(6.126)
est une grandeur appele pseudo-pulsation (l'indice "a" n'ayant aucun rapport avec la solution
x a prcdemment crite).
,
,
DEUST VAS1
a = 02 2
Lorsque le discriminant rduit ' est nul, la solution r est donne par la racine double de
l'quation caractristique (6.117-c)
r = ,
(6.120)
et la solution x (t ) est donne par x a (t ) + x b (t ) ,
rt
Chapitre 6 : Vibrations - Oscillateur harmonique
ia t
e
+B
2
ia t
Il est usuel d'exprimer la solution (6.122) l'aide des fonctions trigonomtriques circulaires.
Ainsi, en remplaant les exponentielles complexes par leurs expressions en fonction des
fonctions trigonomtriques circulaires, l'quation (6.127) peut s'crire
x (t ) = C e t cos a t + ,
Deuxime cas : ' 0
Lorsque le discriminant rduit ' est non nul, les solutions r1 et r 2 de l'quation
caractristique (6.119-b) peuvent tre soit toutes les deux relles, soit toutes les deux
complexes conjugues (en fonction du signe de ' ), et, dans les deux cas, la solution peut
s'crire
e r1 t + B
e r2 t ,
x (t ) = B
(6.122)
1
et B
dpendent des conditions initiales et sont complexes dans le cas
o les constantes B
1
2
) (
( )
(6.128)
) ( ) (
) ( )
(
) ( ) (
) ( )
+B
cos t + i B
B
sin t ,
C cos a t + = B
(6.129-a)
1
2
a
2
1
a
+B
cos t + i B
B
sin t . (6.129-b)
soit C cos a t cos C sin a t sin = B
1
2
a
2
1
a
Pour que l'quation (6.129-b) soit vrifie quel que soit t , il faut que
+B
,
C cos = B
1
2
,
C sin = i B 2 B
1
C 2 = 4B
1 2 ,
1
2
.
tan = i
B1 + B
2
soit
gnral (ce que symbolise la notation ^ ).
i) Si ' > 0 c'est--dire > 0
(6.127)
(6.130-a)
(6.130-b)
et B
qui sont complexes)
Les constantes C et sont relles et dpendent (tout comme B
1
2
et B
galement)
Les racines r1 et r 2 sont relles (les constantes B
1
2
r1 = ' et
r 2 = + ' ,
(6.123)
des conditions initiales.
La notation C n'a bien sur rien voir avec le moment d'inertie
des quations (6.77) ou (6.115)...
et le rgime correspondant est appel rgime apriodique (voir 3 suivant).
Remarque. Du fait que la solution x (t ) est relle, elle est gale son complexe conjugu
ii) Si '< 0 c'est--dire < 0
x * (t ) , ce qui, par usage de l'quation (6.127), conduit
e ia t + B
e ia t = B
* e ia t + B
* e ia t , t ,
B
1
2
1
2
B = B
* et B
=B
* .
Les racines r1 et r 2 sont complexes conjugues et le rgime correspondant est appel rgime
pseudo-priodique (voir 3 suivant). Ces racines s'obtiennent en les crivant sous la forme
r1 = et r 2 = + ,
(6.124-a)
o
Le choix
2 = ' .
(6.124-b)
= i 02 2
(6.124-c)
et son report dans les expressions (6.107-a) des racines conduisent finalement
r1 = i a ,
r = + i ,
et
a
2
soit
(6.131)
&x& + 2 x& + 02 x = 0 ,
(6.132)
Les trois rgimes
En rsum, l'quation du mouvement tant de la forme
(6.125-a)
(6.125-b)
la recherche des solutions de la forme x a (t ) = A t e r t et x b (t ) = B e r t conduit rsoudre
l'quation caractristique
Catherine Potel
- 6.31 -
Universit du Maine - Le Mans
Catherine Potel
- 6.32 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
r 2 + 2 r + 02 = 0
(6.133)
dont le discriminant rduit est donn par
' = 2 02 .
(6.134)
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
L'amortissement est fort et le retour l'quilibre se fait asymptotiquement pour un temps
infini, sans que jamais le mobile ne passe par la position d'quilibre. Il n'y a pas
d'oscillations.
x(t)
x0
Suivant le signe de ce discriminant rduit ' , trois types de rgimes sont obtenus :
rgime critique,
rgime apriodique,
rgime pseudo-priodique.
a)
' = 0 : rgime critique
Remarque. Dans le cas de la figure 6.24,
Figure 6.24
bg
bg
x& 0 = 0 .
x 0 = x 0 et
L'amortissement, caractris par
= 0 ,
(6.135)
c)
' < 0 : rgime pseudo-priodique
est qualifi d'amortissement critique.
L'amortissement, caractris par
< 0 ,
La solution de l'quation du mouvement (6.132) est de la forme :
x (t ) = (A t + B) e
(6.136)
(6.140)
est qualifi d'amortissement faible.
o A et B dpendent des conditions initiales.
La solution de l'quation du mouvement (6.132) est de la forme :
bg
d'un amortissement fort (voir III.3-b suivant). On peut cependant montrer que le retour vers
la position d'quilibre est le plus rapide.
b)
x (t ) = C e t cos a t + ,
Le retour l'quilibre se fait sans oscillation, et l'allure de x t est la mme que dans le cas
(6.141)
o C et dpendent des conditions initiales,
et o la pseudo-pulsation a est dfinie par
a = 02 2 ,
' > 0 : rgime apriodique
(6.142-a)
de pseudo-priode T a associe
L'amortissement, caractris par
> 0 ,
Ta =
(6.137)
est qualifi d'amortissement fort.
2
.
a
(6.142-b)
i) Reprsentation graphique
La multiplication des fonctions
La solution de l'quation du mouvement (6.132) est de la forme :
x (t ) = B 1 e
r1 t
+B2e
r2 t
(6.138)
o B 1 et B 2 dpendent des conditions initiales,
et o les racines de l'quation caractristique
r1 = ' et
C cos a t +
(figure 6.25-a) par les fonctions
exponentielles e t (figure 6.25-b), permet d'obtenir l'allure de la solution (6.1414)
(figure 6.26).
r 2 = + ' ,
+ e
(6.139)
sont toutes deux ngatives.
t
-e
a)
Catherine Potel
- 6.33 -
Universit du Maine - Le Mans
Catherine Potel
b)
- 6.34 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
Figure 6.25
est la dure au bout de laquelle
l'amplitude est divise par e ;
cette constante de temps
augmente si l'amortissement
diminue.
DEUST VAS1
o
Le
mouvement
est
un
mouvement oscillant dont
l'amplitude dcrot avec une
1
constante de temps =
qui
Figure 6.26
Chapitre 6 : Vibrations - Oscillateur harmonique
(6.146)
est la dure au bout de laquelle l'amplitude est divise par e .
9 Le report de l'expression du facteur d'amortissement dtermin en fonction du dcrment
logarithmique en faisant usage de l'quation (6.145) par
a
=
=
,
Ta
2
(6.147)
dans l'expression (6.142-a) au carr de la pseudo-pulsation a permet d'crire
a = 0
1 + [ (2 )] 2 .
(6.148)
Si le rapport (2 ) << 1 (c'est--dire si a >> 1 ), le dveloppement l'ordre 2 de la
ii) Rapport entre deux maximums (resp. minimums) successifs - Dcrment logarithmique
relation (6.148) permet d'crire
L'amplitude du mouvement, un ou plusieurs intervalles de pseudo-priode T a , peut tre une
donne exprimentale qui permet de dduire les caractristiques de l'oscillateur, et notamment
son facteur d'amortissement , en fonction de la pseudo-priode T a .
amorti et sa frquence propre 0 (mme oscillateur mais non amorti).
9 Ainsi, le rapport entre deux maximums
(resp. minimums) successifs est-il donn
par (figure 6.27)
A2
=
,
(6.143-a)
A1
soit, en faisant usage de la solution
(6.144), et puisque cos a t + = 1
(resp. -1) pour t = t 1 et t = t 2 ,
Ce
Ce
Figure 6.27
d'o
t 2
t 1
=e
=e
(t 2 t 1 )
Ta
9 De mme, on peut galement dfinir le dcrment logarithmique par
A1 1
A1
= ln
= ln
,
A 2 n A n +1
Facteur de qualit du systme
Le facteur de qualit Q d'un systme est une grandeur qui tient compte de la facult du
systme considr osciller ; il est dfini par
Q = 0 (2 ) .
(6.150)
Par suite,
- si > 0 , c'est--dire si Q < 1 2 , le rgime est apriodique,
- si < 0 , c'est--dire si Q > 1 2 , le rgime est pseudo-priodique.
(6.143-b)
L'usage des relations (6.142) permet d'crire la pseudo-priode T a sous la forme
Ta = T0
(6.144)
1 0
]2
(6.151)
soit, en reportant l'expression du facteur de qualit (6.133),
( )
T a = T 0 11 4 Q 2
,
o T 0 = 2 0 est la priode propre des oscillations libres non amorties.
Le report de l'expression (6.143) du rapport dans la relation (6.144) conduit
Ta
= ln = T a =
,
- 6.35 -
- si = 0 , c'est--dire si Q = 1 2 , le rgime est critique,
o n dsigne la nime longation (du mme ct).
Catherine Potel
a 0
2
.
(6.149)
0
8 2
La relation (6.149) donne la mesure de l'cart entre la pseudo-pulsation a de l'oscillateur
(6.145)
Universit du Maine - Le Mans
(6.152)
L'interprtation du facteur de qualit en termes de bande passante en rgime permanent pour
les oscillations forces sera donne au III.5-c).
Catherine Potel
- 6.36 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
Reprsentation de l'oscillateur harmonique amorti dans le plan des phases
Chapitre 6 : Vibrations - Oscillateur harmonique
.
x
DEUST VAS1
x0
Figure 6.29 :
.
x
9 L'volution d'un oscillateur non amorti
dans le plan des phases est une ellipse (voir
II.8) d'quation
2
x&
x
+
A
A 0
qui est donc une courbe ferme (figure 6.27).
a)
c)
Mouvement pseudo-priodique
La solution (6.141) et sa drive par rapport au temps s'crivent
x (t ) = C e t cos a t + ,
t
cos a t + + a sin a t + ,
x& (t ) = C e
Ce n'est en revanche plus le cas en prsence d'amortissement.
Mouvement critique
amorti,
Quand t + , x et x& tendent vers 0.
(6.153)
Figure 6.27 : Oscillateur libre non amorti
libre
et x& (0 ) = 0 .
=1
Oscillateur
rgime apriodique. Cas o les conditions
initiales sont telles que, t = 0 , x (0 ) = x 0
)]
(6.156-a)
(6.156-b)
ce qui conduit la courbe paramtrique en fonction du temps t de la figure 6.30.
La solution (6.136) et sa drive par rapport au temps s'crivent
x (t ) = (A t + B) e t ,
x& (t ) = [ (A t + B) + A ]e t ,
(6.154-a)
.
x
(6.154-b)
ce qui conduit la courbe paramtrique en fonction du temps t de la figure 6.28.
.
x
x0
x0
Figure 6.28 : Oscillateur libre amorti,
rgime critique. Cas o les conditions
initiales sont telles que, t = 0 , x (0 ) = x 0
et x& (0 ) = 0 .
Figure 6.30 : Oscillateur libre amorti,
rgime pseudo-priodique. Cas o les
conditions initiales sont telles que, t = 0 ,
x (0 ) = x 0 et x& (0 ) = 0 .
Quand t + , x et x& tendent vers 0.
Quand t + , x et x& tendent vers 0.
b)
Mouvement apriodique
La solution (6.127) et sa drive par rapport au temps s'crivent
x (t ) = B e r 1 t + B e r 2 t ,
(6.155-a)
1
2
r1 t
r2 t
(6.155-b)
,
x& (t ) = B 1 r1 e + B 2 r 2 e
avec r1, r 2 < 0 , ce qui conduit la courbe paramtrique en fonction du temps t de la
figure 6.29.
Catherine Potel
- 6.37 -
Universit du Maine - Le Mans
Catherine Potel
- 6.38 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
IV
DEUST VAS1
OSCILLATIONS FORCEES SOUS EXCITATION PERIODIQUE (SYSTEME
AMORTI)
1.
Chapitre 6 : Vibrations - Oscillateur harmonique
2.
DEUST VAS1
Solution gnrale de l'quation
Comme toute quation diffrentielle comportant un second membre, la solution gnrale x (t )
de l'quation avec second membre est la somme de la solution gnrale x 1 (t ) de l'quation
Equation du mouvement
Les oscillateurs tudis dans les paragraphes prcdents sont maintenant soumis une action
mcanique extrieure (force d'amplitude F 0 ou moment d'amplitude C 0 ) suppose
sinusodale de pulsation . L'excitation de l'oscillateur est alors priodique (de priode
T = 2 ), et les oscillations sont dites forces (par opposition aux oscillations libres des II
sans second membre et d'une solution particulire x 2 (t ) de l'quation avec second membre,
x (t ) = x 1 (t ) + x 2 (t ) ,
(6.158)
soit
o la solution x 1 (t ) correspond aux oscillations libres du systme, est donc de la forme
(6.121), (6.127) ou (6.128) et tend donc vers 0 au bout d'un certain temps, et o la solution
particulire x 2 (t ) correspond au rgime appel stationnaire ou permanent.
et III).
- Il ne faut pas confondre la notation 0 qui dsigne la pulsation propre des oscillations
libres non amorties, et la notation qui dsigne la pulsation des oscillations forces.
- Il convient galement de noter que le terme "sinusodal" dsigne une fonction circulaire qui
peut tre soit la fonction sinus, soit la fonction cosinus. C'est la fonction cosinus qui est
choisie dans la suite de ce paragraphe par commodit, mais la fonction sinus aurait tout
aussi bien pu tre utilise.
- Il convient par ailleurs de noter qu'en toute rigueur, le signal d'excitation n'est pas
rellement sinusodal, puisque mis en service t = 0 ...
L'quation du mouvement est alors de la forme
&x& + 2 x& + 2 x = 0
, si t < 0 ,
2
&x& + 2 x& + 0 x = f 0 cos ( t ) , si t 0 ,
Deux rgimes sont distinguer.
Rgime transitoire
Le rgime transitoire est la premire partie du mouvement pendant laquelle les vibrations
libres (fonction x 1 (t ) ) s'attnuent de plus en plus pour tendre vers zro. Ce rgime est bien
entendu constitu la fois de x 1 (t ) mais galement de x 2 (t ) .
Rgime stationnaire (ou permanent) :
Le rgime stationnaire est la deuxime partie du mouvement, rgulier, priodique, puisque la
cause du mouvement est une force elle-mme priodique, et correspond donc uniquement la
fonction x 2 (t ) .
(6.157-a)
(6.157-b)
o f 0 est homogne une acclration si x est homogne une longueur ( f 0 = F 0 m ), ou
une acclration angulaire si x (not alors prfrentiellement ) est un angle
( f 0 = C 0 I ), I tant homogne un moment d'inertie.
En rsum, le problme rsoudre (problme bien pos) comprend la fois l'quation du
mouvement et les conditions initiales, soit
(6.157-a)
&x& + 2 x& + 2 x = 0
, si t < 0 ,
0
2
(6.157-b)
&x& + 2 x& + 0 x = f 0 cos ( t ) , si t 0 ,
(6.157-c)
x (0) = x 0 , x& (0 ) = x& 0 , t = 0 .
La dure du rgime transitoire est le temps pendant lequel le systme se "souvient" de son tat
initial, avant que la force n'entre en action. Pass ce temps, rien dans l'tat du systme ne
permet de retrouver cet tat initial. L'ordre de grandeur de la dure de ce rgime transitoire est
donn par la constante de temps = 1 (voir Eq. (6.146)).
Dans le cas d'un systme faiblement amorti, cette priode transitoire pourra tre trs longue,
voire de dure infinie dans le cas d'un systme sans amortissement = 0 .
3.
Mthode d'tude du rgime stationnaire (ou permanent)
L'tude du rgime stationnaire consiste chercher une solution particulire x 2 (t ) de
l'quation (6.157-b)
&x& + 2 x& + 02 x = f 0 cos ( t ) .
(6.159)
Pour cela, il est commode de lui associer l'quation
&y& + 2 y& + 02 y = f 0 sin ( t ) ,
Catherine Potel
- 6.39 -
Universit du Maine - Le Mans
Catherine Potel
- 6.40 -
(6.160)
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
= x +iy .
X
et de poser
(6.161)
Chapitre 6 : Vibrations - Oscillateur harmonique
4.
DEUST VAS1
Mise en vidence du phnomne de rsonance sur un exemple
s'crivent
Par suite, les drives premire et seconde de la nouvelle variable X
& = x& + i y& et X
&& = &x& + i &y& , et la somme de l'quation (6.159) et de l'quation
respectivement X
(6.160) multiplie par (i ) s'crit
& + 2 X
it
&& + 2 X
X
,
(6.162)
0 =f0e
a)
Oscillateur non amorti
quation dont il est ais de trouver une solution particulire en la cherchant sous la forme
e it ,
(t ) = A
X
(6.163)
Une masse ponctuelle m est suspendue un ressort de masse
ngligeable et de raideur k . Un mcanisme (non reprsent) soumet la
masse une force F sinusodale de pulsation (figure 6.31) de la
forme F = F 0 cos ( t ) .
est une amplitude complexe.
o A
2
La position de la masse m est repre par l'abscisse x (t ) dont l'origine
est prise la position d'quilibre de la masse.
La solution particulire x 2 (t ) de l'quation (6.159) est ainsi la partie relle de la solution
(t ) de l'quation (6.162) :
X
(t )
x 2 (t ) = R e X
= A
e i2 ,
A
2
2
e i ( t + 2 ) = A
(t ) = A
X
2
2 cos t + 2 + i sin t + 2
il vient
[ (
x 2 (t ) = A
2 cos t + 2
Figure 6.31
(6.164)
sous forme trigonomtrique,
soit, en reportant l'amplitude complexe A
2
(t ) , soit
dans l'expression (6.163) de X
F = F0 cos ( t)
)]
soit
&x& + 02 x = f 0 cos ( t ) ,
(6.169-a)
(6.165)
0 = k m
(6.169-b)
(6.166)
est la pulsation propre des oscillations libres non amorties,
et
f 0 = F0 m .
(6.167)
Remarques.
9 La mthode de recherche d'une solution particulire d'une quation diffrentielle
coefficients constants, expose dans ce paragraphe, est bien adapte au cas o le second
membre de l'quation diffrentielle a la forme d'une exponentielle complexe. Il existe d'autres
mthodes qui font l'objet d'un cours de mathmatiques.
est l'amplitude complexe du rgime permanent, et son tude
9 L'amplitude complexe A
2
et ne dpendent
(en module et en phase), fait l'objet du 4 suivant. Les grandeurs A
2
pas des conditions initiales (6.157-c).
9 Dans le cas o le second membre de l'quation du mouvement (6.159) est f 0 sin ( t )
(cf. la remarque du IV.1, juste avant les quations (6.157)), il suffit d'changer les rles de
x et de y dans les quations (6.159) et (6.160), et de choisir pour solution particulire la
- 6.41 -
la position de la masse par rapport au bti. C'est une situation trs courante de changer ainsi
de notation, et il faut bien se souvenir que l'quation du mouvement a la forme (6.169-a)
uniquement parce que x (t ) est repr par rapport la position d'quilibre.
9 La solution gnrale de l'quation sans second membre
&x& + 02 x = 0
(6.170-a)
est donne par exemple par l'quation (6.10)
x 1 (t ) = A 1 cos 0 t + 1 ,
(6170-b)
o les constantes A 1 et 1 sont dtermines par les conditions initiales portant sur la
solution totale x (t ) = x 1 (t ) + x 2 (t ) de l'quation (6.169-a).
9 La solution particulire de l'quation
&x& + 02 x = f 0 cos ( t ) ,
Universit du Maine - Le Mans
(6.169-c)
Remarque.
Il convient de bien noter qu'ici, la position de la masse par rapport la position d'quilibre est
note x (t ) , alors qu'elle tait note X (t ) au II.4-b), et que, dans ce mme , x (t ) dsignait
(t ) : x (t ) = I m X
(t ) .
partie imaginaire (et non plus la partie relle) de X
2
Catherine Potel
9 L'quation du mouvement s'obtient, de la mme manire qu'au
II.4-b), en tenant compte de la force F et s'crit donc
m &x& + k x = F 0 cos ( t ) ,
(6.168)
Catherine Potel
- 6.42 -
(6.171-a)
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
correspondant au rgime permanent, est dtermine par la mthode expose au IV.3
prcdent, en associant l'quation (6.171-a) l'quation
&y& + 02 y = f 0 sin ( t ) ,
x 2 (t ) =
(6.172)
s'crit X
&& = &x& + i &y& , et la somme de
Par suite, la drive seconde de la nouvelle variable X
l'quation (6.171-a) et de l'quation (6.171-b) multiplie par (i ) s'crit
it
&& + 2 X
X
,
(6.173)
0 =f0e
quation dont il est ais de trouver une solution particulire en la cherchant sous la forme
e it ,
(t ) = A
X
(6.174)
2
DEUST VAS1
dans l'expression (6.174) de
soit, en reportant l'expression (6.1758-a) de l'amplitude A
2
(t ) ,
X
(6.171-b)
= x+iy .
X
et en posant
Chapitre 6 : Vibrations - Oscillateur harmonique
f0
02 2
cos ( t ) .
(6.177)
La solution gnrale de l'quation du mouvement (6.171-a) est donc, d'aprs les quations
(6.158), (6.172-b) et (6.177)
x (t ) = A 1 cos 0 t + 1 +
f0
02
cos ( t ) ,
(6.178)
o seules les constantes A 1 et 1 dpendent des conditions initiales (6.157-c).
est une amplitude complexe.
o A
2
e i t dans l'quation
&& = 2 A
Le report de l'expression (6.174) et de sa drive seconde X
2
Figure 6.32 :
(6.173) conduit
normalise
e it = f e it , t 0 ,
+ 02 A
2
0
quation vrifie t 0 uniquement si la fonction du temps (ici e
[(
facteur d'un terme (ici
fonction de la pulsation rduite
0 pour un oscillateur non
) peut tre mise en
amorti.
f ) qui doit alors tre nul,
+ 02 A
2
0
=
A
2
soit
f0
A
2
f0
+0
ou encore
it
1 0 2
Amplitude
2 f
A
en
2
0
0
(6.175-a)
Figure 6.33 : Module a) et phase b)
de
l'amplitude
normalise
2
en fonction de la
A f
(6.175-b)
pulsation rduite 0
pour un
oscillateur non amorti.
du rgime permanent est ici une quantit relle, positive lorsque < ,
L'amplitude A
2
0
ngative lorsque > 0 , et tendant vers l'infini lorsque 0 (figure 6.32).
La reprsentation de telles grandeurs
normalises sans dimension permet
d'obtenir des courbes valables quels
que soient les paramtres ( m , k ,
F 0 ) de l'oscillateur.
Il est commode, en vue de superposer ces courbes celles obtenues lorsque l'oscillateur est
sous forme de module et
amorti (voir IV.4-b) suivant), de reprsenter l'amplitude relle A
2
> 0 et (ou ) lorsque A
<0
de phase 2 , cette dernire tant gale 0 lorsque A
2
2
(figure 6.33).
La solution particulire x 2 (t ) de l'quation (6.171-a) est ainsi la partie relle de la solution
(t ) de l'quation (6.173) :
X
(t )
x 2 (t ) = Re X
(6.176)
: ce phnomne est appel phnomne de rsonance (bien noter
Lorsque 0 , A
2
l'orthographe et le nombre de n...), et la pulsation (resp. frquence) de l'oscillation force
laquelle ce phnomne se produit est appele pulsation (resp. frquence) de rsonance. La
pulsation de rsonance est ici gale la pulsation propre 0 des oscillations libres non
amorties.
Catherine Potel
- 6.43 -
Universit du Maine - Le Mans
Catherine Potel
- 6.44 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
Cela explique pourquoi il est interdit une troupe entire (militaires) de marcher au pas
cadenc (qui favorise une frquence prcise) pour viter la destruction ventuelle du pont qui
peut se produire si la frquence du pas se trouve tre celle de rsonance du pont (le pont est
un systme continu mais en premire approximation il est dot d'un mouvement propre global
associ sa masse et son lasticit : mouvement transversal d'une poutre encastre ses deux
extrmits).
soit
&x& + 2 x& + 02 x = f 0 cos ( t ) ,
(6.180-a)
0 = k m
(6.180-b)
L'exemple le plus connu de ce phnomne est celui de l'effondrement du pont de Tacoma
dans l'Etat de Washington (USA) en Novembre 1940. En toute premire approximation, la
masse m (ou le moment d'inertie C ) du pont est celle (ou celui) du tablier, l'lasticit tant
9 La solution gnrale de l'quation sans second membre
donne par les cbles. Ce pont tait entr en rsonance par l'effet des forces dues au vent sur
le profil du tablier (mouvement forc). Une fois que le pont a commenc se tordre (mode de
torsion, figure 6.34-a) avec une frquence environ gale 1.4 Hz, l'amplitude a augment,
conduisant l'effondrement du pont (figure 6.34-b).
est la pulsation propre des oscillations libres non amorties,
= (2 m ) ,
et
f 0 = F0 m .
(6.180-c)
(6.180-d)
&x& + 2 x& + 02 x = 0
(6.181)
est donne, selon les valeurs relatives de et de 0 (voir III), par l'une des quations
(6.121), (6.127) ou (6.128)
x 1 (t ) = A 1 t + B 1 e t ,
ou
ou
x 1 (t ) = A 1 e
x 1 (t ) = C 1 e
r1 t
+ B1 e
r2 t
(6.182-a)
,
(6.182-b)
(6.182-c)
cos a t + 1 ,
o les constantes A 1 et B 1 , ou C 1 et 1 , sont dtermines par les conditions initiales
(6.157-c) portant sur la solution totale x (t ) = x 1 (t ) + x 2 (t ) de l'quation (6.180-a).
a)
Figure 6.34 : Torsion a) puis effondrement b) du Pont de Tacoma.
http://www.nrc-cnrc.gc.ca/highlights/2003/0306tacoma_f.html
b)
9 La solution particulire de l'quation
&x& + 2 x& + 02 x = f 0 cos ( t ) ,
Une solution au problme est d'optimiser le profil du tablier pour que l'effet du vent ne se
traduise pas par une force qui entretient le mouvement oscillatoire...
b)
Une masse ponctuelle m est suspendue un ressort de masse
ngligeable et de raideur k et un amortisseur de constante . Un
mcanisme (non reprsent) soumet la masse une force F sinusodale
de pulsation (figure 6.35) de la forme F = F 0 cos ( t ) . La position
de la masse m est repre par l'abscisse x (t ) dont l'origine est prise
correspondant au rgime permanent, est dtermine par la mthode expose au IV.3
prcdent, en associant l'quation (6.183-a) l'quation
&y& + 2 y& + 02 y = f 0 sin ( t ) ,
et en posant
Oscillateur amorti
la position d'quilibre de la masse.
(6.183-a)
= x +iy .
X
(6.183-b)
(6.184)
s'crivent
Par suite, les drives premire et seconde de la nouvelle variable X
&
&
&
respectivement X = x& + i y& et X = &x& + i &y& , et la somme de l'quation (6.183-a) et de l'quation
(6.183-b) multiplie par (i ) s'crit
it
&& + 2 X
& + 2 X
X
,
(6.185)
0 =f0e
quation dont il est ais de trouver une solution particulire en la cherchant sous la forme
e it ,
(t ) = A
X
(6.186)
2
F = F0 cos ( t)
Figure 6.35
9 L'quation du mouvement s'obtient, de la mme manire qu'au
II.4-b), en tenant compte de la force F et s'crit donc
m &x& + x& + k x = F 0 cos ( t ) ,
Catherine Potel
- 6.45 -
est une amplitude complexe.
o A
2
e i t et seconde
& = i A
Le report de l'expression (6.186) et de ses drives premire X
2
(6.179)
Universit du Maine - Le Mans
e i t dans l'quation (6.185) conduit
&& = 2 A
X
2
Catherine Potel
- 6.46 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
e it = f e it , t 0 ,
+ 2 i + 02 A
2
0
quation vrifie t 0 uniquement si la fonction du temps (ici e i t ) peut tre mise en
[(
f
facteur d'un terme (ici 2 + 2 i + 02 A
2
0
soit
=
A
2
] ) qui doit alors tre nul,
f0
02 2 + 2 i
et
tan 2 =
2
0
2
02 2
DEUST VAS1
La solution gnrale de l'quation du mouvement (6.183-a) est donc, d'aprs les quations
(6.1581), (6.191) et par exemple (6.182-c),
x (t ) = C 1 e t cos a t + 1 + A
(6.192)
2 cos t + 2 ,
Figure 6.36 : Module a) et
phase b) de l'amplitude
A
A
en
normalise
2
fonction
rduite
(6.188-a)
,
+ 4 2 2
La reprsentation de telles
grandeurs normalises sans
dimension permet d'obtenir
des courbes valables quels
que soient les paramtres ( m ,
k , , F 0 ) de l'oscillateur.
= 0 = 2m0 ,
(6.189-b)
( = 0 ) = f 2 ,
A0 = A
2
0
0
Pour un oscillateur non amorti ( = 0 ), la rsonance est atteinte lorsque 0 (voir IV.4-
(6.189-c)
a) ; lorsque l'amortissement est suffisamment faible (rgime pseudo-priodique de l'oscillateur
libre), le module A
de l'amplitude du rgime permanent prsente un maximum
2
ce qui conduit
A
2
A0
tan 2 =
(1 v 2 )2 + 4 2 v 2
2 v
1 v 2
(6.190-a)
d'amortissement (rgime critique pour = 1 , rgime apriodique pour > 1 et rgime
pseudo-priodique pour < 1 et oscillateur non amorti pour = 0 ).
La solution particulire x 2 (t ) de l'quation (6.183-a) est ainsi la partie relle de la solution
(t ) de l'quation (6.185) :
X
(t )
x 2 (t ) = R e X
Catherine Potel
(rsonance) pour une pulsation m proche de la pulsation propre 0 . La rsonance
d'amplitude n'a donc pas lieu prcisment pour la pulsation propre des oscillations libres
non amorties. Par anticipation sur le IV.5.e), la pulsation m est donne par la relation
(6.190-b)
A en
Les figures 6.36 prsentent les courbes reprsentatives de l'amplitude normalise A
2
0
module et en phase en fonction de la pulsation rduite v = 0 , pour diffrentes valeurs
soit
valeurs
du
d'amortissement
(6.188-c)
et
de la pulsation
0
pour
diffrentes
paramtre
.
(6.188-b)
Il est commode, afin d'obtenir des expressions indpendantes des caractristiques de
l'oscillateur, d'exprimer les relations (6.188) en fonction des variable et paramtres
adimensionnels
v = 0
(6.189-a)
et
o seules les constantes C 1 et 1 dpendent des conditions initiales (6.157-c).
(6.187)
soit, sous forme trigonomtrique,
= A
e i2 ,
A
2
2
f0
=
avec
A
2
Chapitre 6 : Vibrations - Oscillateur harmonique
x 2 (t ) = A
2 cos t + 2
- 6.47 -
(6.191-a)
m = 02 2 2 .
Remarque.
(6.193)
D'aprs l'quation (6.187), et puisque l'argument de 02 2 + 2 i est compris entre 0 et
est tel que
, l'argument 2 de l'amplitude complexe A
2
2 [ , 0] ,
ce qui implique
(6.194-a)
sin 2 < 0 .
(6.194-b)
Comme par ailleurs, d'aprs l'quation (6.188-c), tan 2 est du signe de 0 , il s'ensuit
que cos 2 = sin 2 tan 2 est du signe de 0 .
(6.191-b)
Universit du Maine - Le Mans
Catherine Potel
- 6.48 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
5.
DEUST VAS1
Chapitre 6 : Vibrations - Oscillateur harmonique
b)
Puissance transmise au systme par la source excitatrice en rgime permanent
(6.195)
est une grandeur rendant compte de la facult d'un systme osciller.
Le but de ce est d'interprter maintenant cette grandeur en termes de puissance et de bande
passante (en rgime permanent).
soit
v 2 (t ) = A
2 sin t + 2 ,
cos t + + 2
v 2 (t ) = V
2
2
(6.197-a)
= A
V
2
2
(6.197-b)
1 T
(6.1200)
P (t ) d t ,
T 0
o T = 2 , soit, en reportant l'expression (6.199-b) de la puissance instantane dans
P =
l'quation (6.200) et en utilisant la relation trigonomtrique classique
1
cos a cos b = [ cos (a + b ) + cos (a b ) ] ,
2
F0 V
T
2
cos 2 t + 2 + 2 + cos 2 + 2 d t ,
P =
2 T 0
[ (
Puissance instantane transmise par la source au systme
La solution particulire de l'quation du mouvement (correspondant au rgime permanent),
donnant la position du systme oscillant, est donne par ( IV.4)
x 2 (t ) = A
(6.196)
2 cos t + 2
et sa vitesse par
Puissance moyenne
La puissance moyenne, note P , est, par dfinition,
Comme soulign au III.4, le facteur de qualit
Q = 0 (2 )
a)
DEUST VAS1
est le module de l'amplitude de la vitesse.
)]
d'o
F0 V
F0 V
2
2
sin 2 .
cos 2 + 2 =
(6.201)
2
2
D'aprs l'quation (6.194-b), sin 2 < 0 , ce qui implique que P > 0 ; cela signifie bien
P =
qu'en moyenne dans le temps (sur une priode) l'nergie est donc bien fournie positive par la
source au systme et non pas l'inverse.
9 Calcul de sin 2 en fonction de v et .
Le report de l'expression (6.190-b) de tan 2 dans l'quation
D'aprs l'quation (5.1) du chapitre 5 ( I.1-a), la puissance instantane de la force excitatrice
F(t ) = F 0 cos ( t )
(6.198)
sin 2 = tan 2 cos 2 =
applique au point en lequel est calcule la vitesse v 2 (t ) , relativement au repre (galilen)
2 v
R est telle que
1 v 2
P (t ) = F(t ) v 2 (t ) ,
(6.199-a)
soit, en faisant usage des relations (6.197) et (6.198-a)
cos ( t ) cos t + + 2 .
P (t ) = F 0 V
2
2
conduit
sin 2 =
1+
(6.199-b)
soit
sin 2 =
Remarque. Le calcul d'une puissance s'effectue avec des quantits relles et non complexes,
car la partie relle d'un produit n'est pas gale au produit des parties relles.
tan 2
1 + tan 2 2
4 2 v 2
(1 v 2 )2
2 v
(1 v )
2 2
<0 .
2
+ 4 v
(6.202)
, (6.190-a) de A
Le report des expressions (6.1202) de sin 2 , (6.197-b) de V
2
2 A 0 et
(6.180-d) de F 0 = m f 0 dans l'expression (6.201) de la puissance moyenne conduit finalement
(voir figure 6.37)
P =m
Catherine Potel
- 6.49 -
Universit du Maine - Le Mans
Catherine Potel
f 02
0
v 2
(1 v 2 )2 + 4 2 v 2
- 6.50 -
(6.203)
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
La drive de la puissance moyenne P par rapport la pulsation rduite v = 0 est
[ (
2 2
+ 4 2 v 2 v 2 4 v 1 v 2 + 8 2 v
f 02 2 v 1 v
dP
.
=m
2
dv
0
2
2
2 2
+ 4 v
1 v
(6.204)
Le report des expressions (6.203) et (6.205) dans l'quation
P = P max 2
v = 1 (solution physiquement impossible)
soit
v =1 .
ou
Par suite, la puissance moyenne P
v 2
m f 02
soit
soit
v = 2 + 1 ou v = 2 + 1 ,
soit, en ne gardant que les deux racines positives
v 1 = + 2 + 1 et v 2 = + 2 + 1 ,
est maximale (rsonance de puissance) pour v = 1 ,
soit = 0 , pulsation propre des oscillations libres non amorties (figure 6.34), qui ne
il vient
et
La valeur P max correspondante s'obtient en remplaant v par 1 dans l'quation (6.203), ce
qui conduit
m f 02
=
P max =
4 0
4
(6.205)
(6.208)
2
,
0
(6.209-a)
2 1 = = 2 .
(6.209-b)
v 2 v1 = 2 =
dpend par du facteur d'amortissement .
m f 02
f 02
(1 v 2 )2 + 4 2 v 2 8 0
(v 2 + 2 v 1)(v 2 2 v 1) = 0 ,
(6.207)
conduit
L'annulation du numrateur du second membre de l'quation (6.204) conduit
(1 v 2 )(1 + v 2 ) = 0
DEUST VAS1
9 Recherche des pulsations 1 et 2 telles que P = P max 2
9 Recherche de la pulsation rendant P maximale (rsonance)
Chapitre 6 : Vibrations - Oscillateur harmonique
Par suite, l'expression (6.206) du facteur de qualit est
1 0
Q=
=
,
2 2
(6.210)
expression donne sans dmonstration au III.4.
c)
Bande passante - facteur de qualit
L'acuit de la rsonance (c'est--dire le caractre plus ou moins aigu de la courbe
reprsentative de la puissance moyenne P autour de la rsonance) est dcrite en termes de
bande passante ou de facteur de qualit.
Dfinitions :
- La bande passante est l'intervalle de frquence (ou de pulsation), not = 2 1 ,
o la puissance moyenne P fournie par la force excitatrice est suprieure la moiti
de sa valeur maximale P max .
- Le facteur de qualit est le rapport de la frquence de rsonance sur la largeur de la
bande passante :
0
Q=
.
(6.206)
Catherine Potel
- 6.51 -
Universit du Maine - Le Mans
Figure 6.37 : Puissance moyenne P fournie par la force excitatrice en fonction de la
pulsation rduite 0 pour diffrentes valeurs du paramtre d'amortissement .
Catherine Potel
- 6.52 -
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
d)
DEUST VAS1
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
9 Bande passante en termes d'amplitude
Bande passante et amplitude
Contrairement au cas de la puissance moyenne fournie au systme par la force excitatrice, le
module A
2 de l'amplitude complexe du rgime permanent n'est pas maximal pour v = 1 ,
soit = 0 (voir figure 6.36 et IV.4-b).
D'aprs la dfinition de la bande passante donne au IV.5-c), la bande passante correspond
l'intervalle de frquence o la puissance moyenne est suprieure P max 2 . L'expression
(6.201) de la puissance moyenne, en faisant usage de l'expression (6.197-b) de l'amplitude de
. Par suite,
la vitesse, montre que la puissance moyenne est proportionnelle au carr de A
2
9 Recherche de la pulsation v m rendant A
2 maximale (rsonance d'amplitude)
du rgime permanent, la bande passante correspond l'intervalle de
pour l'amplitude A
2
2 (figure (6.38).
frquence o l'amplitude est suprieure A
2
max
La drive du module A
2 de l'amplitude complexe par rapport la pulsation rduite
v = 0 est, en faisant usage de l'expression (6.190-a)
d A
2
dv
[ (
](
3 / 2
2
1
= A 0 4 v 1 v 2 + 8 2 v 1 v 2 + 4 2 v 2
.
2
(6.211)
L'annulation du numrateur du second membre de l'quation (6.211) conduit
v = 0 ou v 2 = 1 2 2 ,
soit, en ne retenant pas la solution v = 0 qui n'offre que peu d'intrt,
v m = 1 2 2
<1
si
2 .
(6.212)
du rgime permanent est maximal
Par suite, le module de l'amplitude complexe A
2
(rsonance d'amplitude) pour v m = 1 2 2 , soit m = 02 2 2 = a2 2 . La
rsonance d'amplitude n'a donc lieu ni pour la pulsation propre 0 des oscillations libres
non amorties, ni pour la pseudo-pulsation a du rgime pseudo-priodique des oscillations
libres amorties (figure 6.38).
La valeur A
correspondante s'obtient en remplaant v par v m dans l'quation
2
max
= A
9 Recherche des pulsations 1 et 2 telles que A
2
2
max
max
A0
1
2 1 2
(6.213)
conduit
1
max
A 0 1 (2 ) ,
(6.214-a)
soit, en faisant usage de l'expression (6.210) du facteur de qualit Q ,
A
A Q .
2
Catherine Potel
max
(1 v ) + 4
( )
2
2
v = (1 2 ) 2 1 2
2 2
soit
(6.213) conduit
soit
=
2
1
2 2 1 2
( )
= (1 2 2 )+ 2
v 4 + 2 2 2 1 v 2 +1 8 2 1 2 = 0 ,
ou v
1 2 ,
(6.216)
soit, au premier ordre en
v 2 1 2 ou v 2 1 + 2
(6.214-b)
soit, en ne gardant que les deux racines positives
v 1 1 2 1 et v 2 1 + 2 1 + ,
- 6.53 -
2)
(6.215)
max
Si le facteur d'amortissement << 1 , un dveloppement au premier ordre en de l'expression
A
2
2 (pour < 1
Le report des expressions (6.190-a) et (6.213) dans l'quation
= A
A
2
2
2
(6.190-a), ce qui conduit
A
2
du rgime permanent en fonction de la pulsation
Figure 6.38 : Module de l'amplitude A
2
rduite 0 , pour une valeur d'amortissement telle que = 0.2 .
Universit du Maine - Le Mans
Catherine Potel
- 6.54 -
(6.217)
Universit du Maine - Le Mans
Chapitre 6 : Vibrations - Oscillateur harmonique
DEUST VAS1
il vient
2
,
0
(6.218-a)
2 1 = 2 .
(6.218-b)
v 2 v1 2 =
et
Par suite, si << 1 (en pratique < 0.38 , voir remarque ci-aprs), la bande passante en
amplitude est gale la bande passante en amplitude.
Remarque.
Les racines v 1 et v 2 n'ont d'existence que si les expressions (6.216) de v 2 de l'quation
sont positives, ce qui est manifestement vrai pour v 2 = 1 2 2 + 2 1 2 , mais ne l'est
2
pas toujours pour v = 1 2
) 2
1 . En effet, pour que ce dernier carr soit positif,
il faut que le polynme P( ) = 8 8 2 + 1 soit positif. Le trac de P( ) en fonction de
4
(figure 6.39) montre que cette condition n'est respecte que pour < 1 2 0.38 (puisque
2
<1
2 ).
Figure 6.39. Trac de P( ) = 8 4 8 2 + 1 en fonction de
Catherine Potel
- 6.55 -
Universit du Maine - Le Mans
S-ar putea să vă placă și
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésDe la EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésEvaluare: 4.5 din 5 stele4.5/5 (4)
- TD Automatique 1A JMD 2011Document20 paginiTD Automatique 1A JMD 2011Hajri MohamedÎncă nu există evaluări
- Exemples Patrick PaultreDocument41 paginiExemples Patrick Paultremostefaoui mohammed100% (1)
- Exercices d'intégrales et d'équations intégro-différentiellesDe la EverandExercices d'intégrales et d'équations intégro-différentiellesÎncă nu există evaluări
- Cours Dynamique Des StructuresDocument21 paginiCours Dynamique Des Structuresmohamedouffa67% (3)
- Équations différentielles: Les Grands Articles d'UniversalisDe la EverandÉquations différentielles: Les Grands Articles d'UniversalisÎncă nu există evaluări
- Chapitre 2 Management StratégiqueDocument137 paginiChapitre 2 Management StratégiquemehÎncă nu există evaluări
- Topographie Et Topometrie Modernes Tome 1 PDFDocument535 paginiTopographie Et Topometrie Modernes Tome 1 PDFMohamed Rdait100% (9)
- 3 Exercices Corriges MMCDocument5 pagini3 Exercices Corriges MMCbenabedm60% (15)
- Exercices d'intégrales de lignes, de surfaces et de volumesDe la EverandExercices d'intégrales de lignes, de surfaces et de volumesÎncă nu există evaluări
- TD01 Asservissements 1Document10 paginiTD01 Asservissements 1fekielyes100% (1)
- Poly TDDocument64 paginiPoly TDBOBE2007069100% (2)
- N° 775 Toyota Yaris 1.0 Février 2001Document25 paginiN° 775 Toyota Yaris 1.0 Février 2001PhiloMen50% (2)
- Pendule OscillantDocument12 paginiPendule OscillantRad Ouan100% (1)
- TD de Vibrations Des Systemes Discrets + SolutionDocument33 paginiTD de Vibrations Des Systemes Discrets + SolutionAfif Al Baalbaki50% (6)
- Erraoui 2016 Ratt PDFDocument3 paginiErraoui 2016 Ratt PDFYounes Attar100% (1)
- Réducteur À Arbre CreuxDocument10 paginiRéducteur À Arbre CreuxBouker Mohamed100% (1)
- Chapitre Transistor Bip 16-17Document18 paginiChapitre Transistor Bip 16-17abdelkanÎncă nu există evaluări
- Plan Solera A0 Ech1 2 PDFDocument1 paginăPlan Solera A0 Ech1 2 PDFИгорь МакаровÎncă nu există evaluări
- Lokation Livre Kaid 150dpiDocument63 paginiLokation Livre Kaid 150dpibou gnaÎncă nu există evaluări
- Épreuve - COMPRÉHENSION ÉCRITEDocument2 paginiÉpreuve - COMPRÉHENSION ÉCRITECristina MartínezÎncă nu există evaluări
- Prélude, Suite Violoncelle No. 1 (Version Segovia) (BWV 1007)Document2 paginiPrélude, Suite Violoncelle No. 1 (Version Segovia) (BWV 1007)Rémy Lecerf100% (1)
- PHY121 TD3 CorrigeDocument0 paginiPHY121 TD3 CorrigeKhaDija KhaLdiÎncă nu există evaluări
- CnamC42 2008 PDFDocument12 paginiCnamC42 2008 PDFChakir LaiminaÎncă nu există evaluări
- Cours Mecanique Dynamique PointDocument6 paginiCours Mecanique Dynamique PointСукаынаАсадÎncă nu există evaluări
- Solution1 (MR Lkrad)Document8 paginiSolution1 (MR Lkrad)Amine Mezzyane100% (2)
- A4181D55Document8 paginiA4181D55bvghftÎncă nu există evaluări
- Chap1 PhysiqueDocument22 paginiChap1 PhysiqueMouad MaaroufÎncă nu există evaluări
- Physique D Chap11 Mouvement ProjectileDocument3 paginiPhysique D Chap11 Mouvement Projectileouraltn2001Încă nu există evaluări
- Partie IIDocument52 paginiPartie IItarrieuÎncă nu există evaluări
- Semestre 3 DS 2 2015-2016Document6 paginiSemestre 3 DS 2 2015-2016Abdelali YacoubiÎncă nu există evaluări
- Bac Physique Oscillations MecaniquesDocument21 paginiBac Physique Oscillations MecaniquesJean LeonardoÎncă nu există evaluări
- Chapitre 2 Réponse ÉlastiqueDocument28 paginiChapitre 2 Réponse ÉlastiqueSaid MtacyprÎncă nu există evaluări
- Chap02. Réponse Elastique Des Structures Aux SéismesDocument27 paginiChap02. Réponse Elastique Des Structures Aux Séismesahmadomar89Încă nu există evaluări
- LivreDocument92 paginiLivrebelier200476Încă nu există evaluări
- Orca Share Media1666461557200 6989646375224304223Document12 paginiOrca Share Media1666461557200 6989646375224304223khezzane nadjouaÎncă nu există evaluări
- l3 Dyn Examen 2020-1Document5 paginil3 Dyn Examen 2020-1Henry PÎncă nu există evaluări
- Chapitre02.réponses Élastiques Des Structures PDFDocument26 paginiChapitre02.réponses Élastiques Des Structures PDFMohamed HaykelÎncă nu există evaluări
- Cours ChaosDocument41 paginiCours ChaoslabfaoÎncă nu există evaluări
- M12 Chute Libre FrottementsDocument11 paginiM12 Chute Libre FrottementsNeoXana01Încă nu există evaluări
- Ondes Et Vibrations: IUT, Année 2008-09Document16 paginiOndes Et Vibrations: IUT, Année 2008-09Armand StevenskiÎncă nu există evaluări
- Cours 03 Principe Fondamental de La Dynamique PDFDocument3 paginiCours 03 Principe Fondamental de La Dynamique PDFDamien Miranda50% (2)
- MecaniqueDocument20 paginiMecaniquehamzaÎncă nu există evaluări
- Cours Mécanique Analytique Et VibrationsDocument39 paginiCours Mécanique Analytique Et Vibrationsdaongocha108100% (1)
- Sec Minesponts 2006 Sic MPDocument17 paginiSec Minesponts 2006 Sic MPBrahim AchayfadÎncă nu există evaluări
- Gratte-Ciels Et Tours: A 2007 Phys. Ii MPDocument6 paginiGratte-Ciels Et Tours: A 2007 Phys. Ii MPMihnea GamanÎncă nu există evaluări
- 08 Cours Integration Primitives2 PDFDocument17 pagini08 Cours Integration Primitives2 PDFMourad MouradbensalemÎncă nu există evaluări
- Devoir de Contrôle N°2 - 2009-2010 (Corrigé) (Lycée Sidi Zekri) PDFDocument4 paginiDevoir de Contrôle N°2 - 2009-2010 (Corrigé) (Lycée Sidi Zekri) PDFMaryem RezguiÎncă nu există evaluări
- Meca Auto 07Document11 paginiMeca Auto 07Lotfi Cheikh100% (1)
- (D) Identification2Document9 pagini(D) Identification2Yacine AlajijeÎncă nu există evaluări
- Corrige Ext Aii 2010Document20 paginiCorrige Ext Aii 2010HamzaLakrouneÎncă nu există evaluări
- P 07 CT 2 CBDocument4 paginiP 07 CT 2 CBMihnea GamanÎncă nu există evaluări
- TD - TPDocument3 paginiTD - TPmarouane ait benayadÎncă nu există evaluări
- Physique-Chimie - Corrigé CB - Geipi - Maj 22-23Document18 paginiPhysique-Chimie - Corrigé CB - Geipi - Maj 22-23Enak HarelÎncă nu există evaluări
- 19 Toutelamecanique 1Document6 pagini19 Toutelamecanique 1HMH HMHÎncă nu există evaluări
- Reservoirs Spheriques..Document7 paginiReservoirs Spheriques..bouchaib12345Încă nu există evaluări
- TP N 3 Force CentrifugeDocument4 paginiTP N 3 Force CentrifugeHassanHajjiÎncă nu există evaluări
- Physique: Freinage Électromagnétique D'une Plaque MétalliqueDocument11 paginiPhysique: Freinage Électromagnétique D'une Plaque MétalliqueMihnea GamanÎncă nu există evaluări
- Suspension D'automobileDocument4 paginiSuspension D'automobileYassine SanixÎncă nu există evaluări
- Relativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiqueDe la EverandRelativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiqueÎncă nu există evaluări
- Complex EcorDocument17 paginiComplex EcorAlinour ViÎncă nu există evaluări
- LCS TD TPDocument6 paginiLCS TD TPinfocomputeÎncă nu există evaluări
- Analyse GranulometriqueDocument16 paginiAnalyse GranulometriqueCharaf Khelifi100% (1)
- TD-Nฐ3-S้ries De FourierDocument1 paginăTD-Nฐ3-S้ries De FourierAlinour ViÎncă nu există evaluări
- Vibration Et Les Ondes Mecanique UsthbDocument5 paginiVibration Et Les Ondes Mecanique UsthbKovax KovaxinovÎncă nu există evaluări
- Deux Degres Libre CoursDocument12 paginiDeux Degres Libre CoursAlinour ViÎncă nu există evaluări
- TD1 Rappel Sur Les VecteursDocument1 paginăTD1 Rappel Sur Les VecteursAlinour ViÎncă nu există evaluări
- Ondes Elastiques CoursDocument16 paginiOndes Elastiques CoursAlinour ViÎncă nu există evaluări
- Lagrange Cours PDFDocument6 paginiLagrange Cours PDFAlinour ViÎncă nu există evaluări
- Cours 03 - EDP&MDF-pages-18-24Document7 paginiCours 03 - EDP&MDF-pages-18-24cvwassim2k22Încă nu există evaluări
- Cours Analyse Jean NotDocument210 paginiCours Analyse Jean Notnguessan lassieÎncă nu există evaluări
- Compte Rendu LabviewDocument8 paginiCompte Rendu LabviewYoussef ElfekihÎncă nu există evaluări
- Unit D Apprentissage de 4emeDocument19 paginiUnit D Apprentissage de 4emeMajda RemiliÎncă nu există evaluări
- Resume I Maths Financière Zahi G 7 8Document1 paginăResume I Maths Financière Zahi G 7 8chehiwat maghribiaÎncă nu există evaluări
- Ms ProjectDocument23 paginiMs ProjectMostafa LoumissiÎncă nu există evaluări
- Toan HK1 07-08 - Lop 7A - Nguyen Anh Tuan OkDocument2 paginiToan HK1 07-08 - Lop 7A - Nguyen Anh Tuan OkPrécepteur De Maths HanoiÎncă nu există evaluări
- Guide 100v PDFDocument14 paginiGuide 100v PDFCarlos KarlÎncă nu există evaluări
- Rapport Programmateur de PICDocument61 paginiRapport Programmateur de PICHachem ElyousfiÎncă nu există evaluări
- Latitudes 1Document39 paginiLatitudes 1benazech0% (1)
- Alspa mv1000 FR v1 31Document117 paginiAlspa mv1000 FR v1 31fakhri100% (1)
- Délégation Nouvelle Demande Renouvellement Renouvellement Avec Ajout de FilièreDocument6 paginiDélégation Nouvelle Demande Renouvellement Renouvellement Avec Ajout de FilièreElamri AbderrazakÎncă nu există evaluări
- Solution Serie Dexercice Chimie N°4Document3 paginiSolution Serie Dexercice Chimie N°4medabdellahisamba34Încă nu există evaluări
- Implementation AutomatesDocument5 paginiImplementation Automatesibou yaraÎncă nu există evaluări
- Scdsci M 2008 Morel SimonDocument82 paginiScdsci M 2008 Morel SimonAbdelilah CharboubÎncă nu există evaluări
- Traité Sur L'êtreDocument499 paginiTraité Sur L'êtredorsÎncă nu există evaluări
- Blue Professional Modern CV ResumeDocument2 paginiBlue Professional Modern CV ResumeImen CherifÎncă nu există evaluări
- Compte Rendu TSI Mini ProjetDocument5 paginiCompte Rendu TSI Mini ProjetJihadJijiÎncă nu există evaluări
- Rapport Pfe V23.1Document165 paginiRapport Pfe V23.1el_bahri_ieeaÎncă nu există evaluări
- 14 DéterminantDocument8 pagini14 DéterminantAnfel AnfelÎncă nu există evaluări
- Franceza 8I BarDocument2 paginiFranceza 8I Barlorysha2014Încă nu există evaluări
- Albert Mathiez - Un Proces̀ de Corruption Sous La Terreur L'affaire de La Compagnie Des IndesDocument412 paginiAlbert Mathiez - Un Proces̀ de Corruption Sous La Terreur L'affaire de La Compagnie Des IndesdeejayredoneÎncă nu există evaluări