S-ar putea să vă placă și
- Additional-From-Cache Impact On PerformanceDocument10 paginiAdditional-From-Cache Impact On Performanceweb1_webteamÎncă nu există evaluări
- Bachelor of Computer Applications (BCA) : Assignments Year, 2010 (6 Semester)Document7 paginiBachelor of Computer Applications (BCA) : Assignments Year, 2010 (6 Semester)ytisrevinuÎncă nu există evaluări
- Distributed Denial of Service Attack ToolsDocument8 paginiDistributed Denial of Service Attack Toolschand123123Încă nu există evaluări
- Network Security - Defense Against Dos/Ddos Attacks: Hang ChauDocument11 paginiNetwork Security - Defense Against Dos/Ddos Attacks: Hang Chauaustria01Încă nu există evaluări
- Adv CompDocument38 paginiAdv Compchand123123Încă nu există evaluări
- Web ServicesDocument25 paginiWeb Serviceschand123123Încă nu există evaluări
- Security Overview-Cryptography and Network SecurityDocument17 paginiSecurity Overview-Cryptography and Network SecurityHaveit12Încă nu există evaluări
- Research On MCCDMADocument143 paginiResearch On MCCDMAchand123123Încă nu există evaluări
- Wireless CommunicationsDocument48 paginiWireless Communicationschand12312350% (2)
- AODV Routing Implementation For Scalable Wireless Ad-Hoc Network Simulation (SWANS)Document15 paginiAODV Routing Implementation For Scalable Wireless Ad-Hoc Network Simulation (SWANS)chand123123Încă nu există evaluări
- 10 1 1 73Document8 pagini10 1 1 73chand123123Încă nu există evaluări
- CCK ModulationDocument7 paginiCCK Modulationtom catÎncă nu există evaluări
- Question Paper SolutionsDocument51 paginiQuestion Paper Solutionschand123123Încă nu există evaluări
- Co QuestionsDocument6 paginiCo Questionschand123123Încă nu există evaluări
- Programming in CDocument12 paginiProgramming in Cchand123123Încă nu există evaluări
- Overview of E-MailDocument19 paginiOverview of E-Mailchand123123Încă nu există evaluări
- Symmetric EncryptionDocument40 paginiSymmetric Encryptionchand1231230% (1)
- Why CryptographyDocument21 paginiWhy Cryptographychand123123Încă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Whirlpool ADG6550 IxDocument17 paginiWhirlpool ADG6550 Ixairwolf4226100% (1)
- Gamow-Teller Strength and Nuclear Deformation: MotivationDocument62 paginiGamow-Teller Strength and Nuclear Deformation: MotivationdwyphyÎncă nu există evaluări
- DC ServoDocument17 paginiDC ServoMuhammad Iqbal ZahidÎncă nu există evaluări
- L Series GXWorks2 Programming RevADocument208 paginiL Series GXWorks2 Programming RevArubén fdfÎncă nu există evaluări
- A Ele Spe 800 30021 0Document29 paginiA Ele Spe 800 30021 0ZaidiÎncă nu există evaluări
- Installation & Adjustment Manual Model H900Document55 paginiInstallation & Adjustment Manual Model H900Toño gonzalezÎncă nu există evaluări
- List of Figures: Pin Type Insulator 11Document46 paginiList of Figures: Pin Type Insulator 11Shivlal MohalÎncă nu există evaluări
- 11kv Metering CubicleDocument18 pagini11kv Metering CubiclePrashant Nankar100% (1)
- Data Sheets of LED Mirrors From Dan@ PDFDocument10 paginiData Sheets of LED Mirrors From Dan@ PDFJordan WhiteÎncă nu există evaluări
- Unit 3 PLC PDFDocument15 paginiUnit 3 PLC PDFMahesh ShendeÎncă nu există evaluări
- Miller Coils - Catalog 59Document36 paginiMiller Coils - Catalog 59attapapa100% (1)
- Arc Geo Mini ManualDocument7 paginiArc Geo Mini ManualhalaÎncă nu există evaluări
- LESSON 1 Digital ArtsDocument39 paginiLESSON 1 Digital ArtsCalvin Cabacungan100% (1)
- TC4011BP, TC4011BF, TC4011BFT: TC4011B Quad 2 Input NAND GateDocument8 paginiTC4011BP, TC4011BF, TC4011BFT: TC4011B Quad 2 Input NAND GateAleksandar GrujićÎncă nu există evaluări
- Engineering Sciences 151. Electromagnetic Communication LaboratoryDocument5 paginiEngineering Sciences 151. Electromagnetic Communication LaboratorybaymanÎncă nu există evaluări
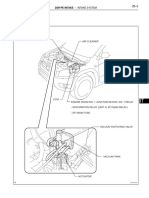
- Intake System: Parts LocationDocument7 paginiIntake System: Parts LocationMenzie Peter RefolÎncă nu există evaluări
- A Survey On Slip Power Recovery DrivesDocument9 paginiA Survey On Slip Power Recovery Drivesesaivanan1150% (2)
- PLD-25/CBS: Cbs Emergency Led Illumination SignDocument2 paginiPLD-25/CBS: Cbs Emergency Led Illumination SignThanosEleftheroudisÎncă nu există evaluări
- Test ReportDocument54 paginiTest ReportSiva NandhamÎncă nu există evaluări
- 2 B&G+1BL003LF+Install+ManualDocument4 pagini2 B&G+1BL003LF+Install+Manualazul_281808Încă nu există evaluări
- Universal Motor 28th Apr 2020Document5 paginiUniversal Motor 28th Apr 2020Sourav KumarÎncă nu există evaluări
- Vacuum Circuit Breaker CatalogueDocument11 paginiVacuum Circuit Breaker Cataloguedabs_orangejuice0% (1)
- Thesis On Floorplanning (VLSI) by Renish LadaniDocument91 paginiThesis On Floorplanning (VLSI) by Renish Ladanirenish75% (8)
- Bosch Mems 12 Micro Machine Symposium ErnstDocument10 paginiBosch Mems 12 Micro Machine Symposium ErnstanisatputeÎncă nu există evaluări
- 3092 RC Stunt CarDocument2 pagini3092 RC Stunt CarCooperÎncă nu există evaluări
- Lossless and Lossy Audio Data Compression RevisiDocument8 paginiLossless and Lossy Audio Data Compression RevisiKuncoro Triandono Mukti100% (1)
- Temperature Sensor - The LM35Document3 paginiTemperature Sensor - The LM35ShravanKumarÎncă nu există evaluări
- Computerized Engine Controls 10th Edition Hatch Test Bank 1Document4 paginiComputerized Engine Controls 10th Edition Hatch Test Bank 1nadia100% (34)
- Catalogue of K15 15 Inch Patient MonitorDocument2 paginiCatalogue of K15 15 Inch Patient MonitorGenesis LazargaÎncă nu există evaluări
- Et FlowsDocument196 paginiEt FlowsNitish KumarÎncă nu există evaluări