International Journal of Emerging Trends & Technology in Computer Science (IJETTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org
Volume 3, Issue 6, November-December 2014
ISSN 2278-6856
Development of MBP for AVR Based
Controlled Autonomous Vehicle
Ms.D.S.Nikam1, Dr.S.T.Gandhe2 , Ms.J.N.Phasale3
1
Sandip instistute of technology and research center ,Nashik
university of Pune ,India
Sandip instistute of technology and research center ,Nashik
university of Pune ,India
3
SGDCOE,Jalgaon,NMU Univercity,India
Abstract
Nowadays application of autonomous vehicle increases .An
Autonomous vehicle is an artificially intelligent vehicle
capable of traveling in unknown and unstructured
environments independently. This paper proposes, design of a
low cost autonomous vehicle based on backpropagation
algorithm of neural network controlled by AVR for navigation
in unknown environments. The neural network running inside
the AVR is a multilayer feed-forward network. The advantage
of using neural approach over the conventional inverse
kinematic algorithms is that ANNs can avoid time consuming
calculations. Furthermore, in a manner typical of ANNs, it
would be very easy to modify the learned associations upon
changes in the structure of robot manipulators. With
reference to the control paradigm, ANNs have the ability to
approximate arbitrary nonlinear functions which is an
essential requirement in the design of controllers for
nonlinear dynamic systems. Because of their learning and
adaptive features, ANNs can be trained to adaptively control
various nonlinear systems. For training neural network MBP
is used. Multiple Back propagation is a free software
application for training neural network with back propagation
& multiple back propagation algorithm. It is easy to use and
most important feature is that generate C code for the trained
network. This code is compatible with ardiuno uno so it easily
burned onto ATMEGA 328. In this paper we describe
thoroughly software and hardware part and conclude the
result from simulation graph. The hardware of vehicle is
equipped with three ultrasonic sensors for hurdle distance
measurement, all interfaced to a low cost ATMEGA 328
microcontroller.
The microcontroller processes the
information acquired from the sensors and generates robot
motion commands accordingly through neural network.
Keywords:- Autonomous vehicle, Multilayer Feed
forward neural network, Back propagation algorithm,
MBP, ultrasonic sensor, At Mega 328
1. INTRODUCTION
In recent years, ANNs have been successfully used in
various applications such as system identification and
control, robotics, pattern recognition and vision. One
important application of ANNs is in the area of robotics.
In particular, ANNs have been used to compute inverse.
Particularly in autonomous vehicle [2]. The key
requirement of autonomous vehicle is the navigation.
Volume 3, Issue 6, November-December 2014
Navigation is the ability of the mobile robot to reach their
target safely without human assistance. The evolvement of
soft-computing paradigms has provided a powerful tool to
deal with mobile robot navigation process. Among all the
soft-computing methods fuzzy logic based decisionmaking and neural networks have been found to be the
most attractive techniques that can be utilized for this
purpose. Fuzzy system is tolerant to noise and error in the
information coming from the sensory system, and most
importantly it is a factual reflection of the behavior of
human expertise. In general, there are two approaches to
the application of fuzzy logic in mobile robot navigation,
namely, behavior-based approach [5-9] and classical fuzzy
rule-based approach. However, the design of fuzzy logic
rules is often reliant on heuristic experience and it lacks
systematic methodology, therefore these rules might not be
correct and consistent, do not possess a complete domain
knowledge, and/or could have a proportion of redundant
rules. Furthermore, these fuzzy logic rules cannot be
adjusted or tuned on real-time operation, and the off-line
adjustment of their parameters is a time consuming
process. Another problem could be raised when better
precision is needed which is the huge expansion in the
fuzzy rule-based system [7]. On the other hand, several
successful reactive navigation approaches based on neural
networks have been suggested in the literature . In spite of
the different suggested network topologies and learning
methods. However, neural networks that can be
implemented with relatively modest computer hardware
could be very effective and useful. This paper proposes a
low cost implementation of a autonomous vehicle based
on artificial neural network (ANN). The propose neural
network is multilayer feed-forward network with back
propagation learning algorithm consisting of three layers:
an input, hidden and output layer. The input layer is made
out of three neurons that are fed by the ultrasonic sensors
which are used to detect obstacle in the path of the
vehicle. The hidden layer is made out of six neurons and
its purpose is to read input data and multiply them by a
certain weight and then forward the results to the next
layer. The output layer is made out of one neuron that are
directly linked to the motors which control its movement
and its direction. The proposed ANN uses a mix of
activation functions including Sigmoid for the hidden
Page 162
International Journal of Emerging Trends & Technology in Computer Science (IJETTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org
Volume 3, Issue 6, November-December 2014
neurons and linear for the output neurons. Moreover, the
model employs a supervised learning approach using the
back-propagation algorithm to train the network in offline
mode [5].An autonomous vehicle is realized using a single
readily available ATMEGA 328 microcontroller. It is 8-bit
Atmel Microcontroller with 328Kbytes In- System
Programmable Flash memory. The network is trained
offline by using MBP with tangent-sigmoid being the
firing function of neurons. Because linear functions
require much lesser computation power than nonlinear
functions, tangent-sigmoid function is approximated as
piecewise linear function for implementation in
microcontroller. This helps in reducing computational
time. MBP is an application for training the neural
network with back propagation algorithm, which can be
veiwed as generalization of Back propagation algorithm.
2. METHODOLOGY
2.1 Basics of neural network
Neural networks are composed of simple elements
operating in parallel. They are connected each other via
link and each link is associated with numeric value called
as a weight. All the weights in a network are generally
initialized to a random value between zero and one.
Learning in a neural network typically performs by
adjusting a weight. These elements are inspired by
biological nervous systems. Fig. shows simple neural
network.
ISSN 2278-6856
2.2. Back propagation algorithm
A Back Propagation network learns by example. You give
the algorithm examples of what you want the network to
do and it changes the networks weights so that, when
training is finished, it will give you the required output for
a particular input. Back Propagation networks are ideal
for simple Pattern Recognition and Mapping Tasks4.As
just mentioned, to train the network you need to give it
examples of what you want the output you want (called
the Target) for a particular input as shown in Figure. So,
if we put in the first pattern to the network, we would like
the output to be 0 1 as shown in figure 3.2 (a black pixel is
represented by 1 and a white by 0 as in the previous
examples). The input and its corresponding target are
called a Training Pair. Once the network is trained, it will
provide the desired output for any of the input patterns.
Lets now look at how the training works. The network is
first initialized by setting up all its weights to be small
random numbers say between 1 and +1. Next, the input
pattern is applied and the output calculated (this is called
the forward pass). The calculation gives an output which
is completely different to what you want (the Target),
since all the weights are random. We then calculate the
Error of each neuron, which is essentially: Target - Actual
Output (i.e. What you want ,What you actually get). This
error is then used mathematically to change the weights in
such a way that the error will get smaller. In other words,
the Output of each neuron will get closer to its Target (this
part is called the reverse pass). The process is repeated
again and again until the error is minimal.
Figure 1 Simple Neural network
There are two types of learning techniques used by neural
network supervised and unsupervised. In supervised
learning inputs and targets are known. This learning
progression allows the network to identify many patterns
and further generalize to new and unseen patterns. Such
type of training is called supervised learning which uses
classified pattern information to train the network in
offline mode. On the other hand, there exists what so
called the unsupervised learning which uses only
minimum information without pre-classification to train
the network while being in online mode [2]. Some of the
most successful supervised learning approaches are feedforward and back-propagation; while, the most successful
unsupervised learning approaches are the Hebbian and the
competitive
learning rule.Here we are using Back
Propagation Algorithm.
Volume 3, Issue 6, November-December 2014
Figure 2 Back Propagation Network
3 PROPOSED SYSTEM
3.1 Block diagram and flowchart
In proposed system we are using ATMEGA 328A
controller with ultrasonic module. Three ultrasonic sensor
mounted on vehicle which continuously measure the
distance from obstacle. Neural network take decision with
the help of controller. Block diagram of the system is
shown in fig. 3 and Flowchart of the project is shown in
fig.4
Page 163
International Journal of Emerging Trends & Technology in Computer Science (IJETTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org
Volume 3, Issue 6, November-December 2014
ISSN 2278-6856
right and 4 for reverse is decided with the help of rule
table. multiple back propagation (MBP) free coder is used
for training the neural network and generate the c code
for it.
Table 1: Rules for training examples
Figure 3 Block Diagram
Figure 4 flowchart of proposed system
3.2 Implementation
For the proposed system we use multi layer feed-forward
network with back propagation learning algorithm. The
employed configuration contains 3 neurons in the input
layer, 6 in the hidden layer and one in the output layer as
shown in Fig. 3. Three ultrasonic sensor mounted on
vehicle gives the distance from obstacle, these distance
shown on lcd .as shown in table motor output is decided
on the basis of the sensor information. for simplicity here
we are considering 4 range for the input sensor very far
denoted as 0(>24inch ),far denoted as 1(16-23inch),near
denoted as 3(10-22inch),very near denoted as 4 (<10
inch).similarly left and right sensor is used to detect
presence of obstacle denoted by 1(<16 inch)and absence of
obstacle denoted as 0 (>16inch).Depending upon these
information output direction 1for front, 2 for left,3 for
Volume 3, Issue 6, November-December 2014
Range
sensor
0
1
2
3
0
1
2
Left
0
0
0
0
0
0
0
Right
0
0
0
0
1
1
1
Motor
Output
1
1
2
3
1
1
2
3
0
1
2
3
0
1
2
3
0
1
1
1
1
1
1
1
1
1
0
0
0
0
1
1
1
1
2
1
1
3
3
1
4
4
4
As shown in table 1 rules for training the networks are
written into separate excel file and saved the file with .Csv
extension, all the things written in csv file must be in
numerical form there is no need to give the explanation of
input and output .The range sensor input conditions
replace by 0,1,2,3 respectively showing vfar, far, near,
vnear distance information. For training the networks
specifying the topology as a 3-6-1 Where 3 input neuron,
6 hidden neuron and 1 output neuron. Output neuron
describe as integer value for 4 output condition i.e front,
left, right and reverse represented by 1,2,3,4 respectively.
Then .csv file uploaded into train bar. Once it loaded then
specifies the activation function. For this project we are
using tan sigmoid function for hidden neuron and liner
function for output neurons. Then randomize the weights
between -1 and 1.Now network is ready to train so by just
clicking on train button network start training on screen
MSE graph occurred for space and main network.
Network weights of each layer and each neurons are
adjusted automatically to minimize the error and final
adjusted weights for each layer are shown in table 2,3,and
4 respectively. We also see the graph of output vs desired
training signal as shown in fig.5& me 6 respectively.
Finally generated C code burned onto the Atmega 328
controller. We were taking the trial of the vehicle in
indoor environment with 4 stationary obstacle as shown in
fig. Every time it displays the distance from each side and
then it moves in direction where obstacle distance is high.
Therefor it avoiding the heating of obstacle.
Page 164
International Journal of Emerging Trends & Technology in Computer Science (IJETTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org
Volume 3, Issue 6, November-December 2014
4. EXPERIMENTAL RESULTS
ISSN 2278-6856
Table 2: weights for inputs layer to the hidden layer1
Table 3: weights for 1st hidden layer to the 2nd hidden
layer
Figure 5 Desired output vs network output
Table 4: weights for 2nd hidden layer to the output
layer
Figure 6 RMS graph
Volume 3, Issue 6, November-December 2014
Figure 7 Navigate in front direction
Page 165
International Journal of Emerging Trends & Technology in Computer Science (IJETTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org
Volume 3, Issue 6, November-December 2014
Figure 8 Navigate without heating obstacle
5.CONCLUSION
In this paper, design of a low cost autonomous vehicle
based on neural network is presented for transportation of
light weight equipment inside the college campus. Here
we considered MBP software to train the neural network .
From the simulation we conclude that in RMS graph the
mean squared errors are decreasing in other word we said
that network is learning. Mean squared error is the
average square difference between actual value and target
value. Here the result are reasonable because of final
mean square error is small and in fig.4 network output
follows the desired output appropriately. Weights and
biases for input, output and hidden layers are seen after
training of the network and shown in table 2,3,4
respectively. By clicking on generate c code we get
embedded c code. The same code burn onto the At mega
328 Controller and necessary movements of the vehicle is
done accordingly. The vehicle is tested in various indoor
environments containing the obstacles and is found to
avoid the obstacles for most of the times. Experimental
results have shown the validity of the system which avoids
the obstacles and perform the navigation of the vehicle
successfully.
REFERENCES
[1] Umar Farooq Muhammad Amar, Eitzaz ul
aq,Muhammad
Usman Asad,Hafiz Muhammad
AtiqMicrocontroller
based
Neural
NetworkControlledLow
Cost
Autonomous
Vehicle.IEEE computer society.pp. 96-100 ,2010
[2] Youssef Bassil Neural Network Model for PathPlanning Of Robotic Rover Systems . International
Journal of Science and Technology (IJST), E-ISSN:
2224-3577, Vol. 2, No. 2, February, 2012
[3] Schraft R.D., "Mechatronics and Robotics for Service
Applications",
IEEE
Robotics
&Automation
Magazine, pp. 31-37, December 1994.
[4] Dipti Srinivasan, , Min Chee Choy, and Ruey Long
Cheu,Neural Networks for Real-Time Traffic Signal
ControlIEEE
transactions
on
intelligent
transportation systems, vol. 7,pp. 261-272 , no. 3,
September 2006
Volume 3, Issue 6, November-December 2014
ISSN 2278-6856
[5] Harris G., "Robotics Decontamination Keeps
Operators
Clear of Danger", Industrial Robot,
20:3, pp. 30-33, 1993.
[6] J. F. Martins, V. Ferno Pires, , and A. J. Pires,
Unsupervised Neural-Network-Based Algorithm for
an On-Line Diagnosis of Three-Phase Induction
Motor Stator Fault ,IEEE industrial electronics ,
VOL. 54, NO. 1,pp 259-264, February 2007
[7] Khaldoun K. Tahboub, Munaf S. N. Al-Din, A
Neuro-Fuzzy reasoning system for mobile robot
navigation,
Jordan Journal of Mechanical and
Industrial Engineering, vol. 3 (1), pp. 77-88, March
2009
[8] Y. Zhou, D. Wilkins, R. P. Cook, Neural network
control for a fire-fighting robot, University of
Mississippi.
[9] Weisbin C.R., D.Lavery, NASA Rover and
Telerobotics Technology Program , IEEE Robotic
& Automation Magazine, pp. 14-20, December 1994.
[10] Evans J., Krishnamurthy B., "Handling Real World
Motion Planning A Hospital Transport Robot", IEEE
Control Systems, vol.12 pp.15-19,February 1992
AUTHER
D.S.Nikam was born in Nashik, India.
completed B.E in E&TC Engineering from
Cummins college of engineering, Pune In 2010
and pursuing M.E. in E&TC from Sandip
institute of technology and research center,
Nashik. Presently work as a Assistant professor in
SIER,Agaskhind,Nashik
Dr.S.T.Gandhe he has received the .D
from VNNIT, Nagpur, M.S. degrees in
Electrical, electronics and communication
Engineering from university Baroda in 19941996. Presently working as a principal in
Sandip institute of technology and research
center, Nashik. His area of research interest in DSP Artificial
neural network, Fuzzy logic.
J.N.Phasale was born in Nashik, India.
completed B.E
completed B.E. in E&TC Engineering from Cummins coll
Sanjivani college of engineering, Kopergaon In2010 and
pursuing
M.E.
in
E&TC
from
SGDCOE,
Jalgaon.
Page 166
S-ar putea să vă placă și
- THE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSDocument7 paginiTHE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- The Mexican Innovation System: A System's Dynamics PerspectiveDocument12 paginiThe Mexican Innovation System: A System's Dynamics PerspectiveInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Detection of Malicious Web Contents Using Machine and Deep Learning ApproachesDocument6 paginiDetection of Malicious Web Contents Using Machine and Deep Learning ApproachesInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Analysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyDocument6 paginiAnalysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Study of Customer Experience and Uses of Uber Cab Services in MumbaiDocument12 paginiStudy of Customer Experience and Uses of Uber Cab Services in MumbaiInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- A Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)Document10 paginiA Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)International Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Design and Detection of Fruits and Vegetable Spoiled Detetction SystemDocument8 paginiDesign and Detection of Fruits and Vegetable Spoiled Detetction SystemInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Soil Stabilization of Road by Using Spent WashDocument7 paginiSoil Stabilization of Road by Using Spent WashInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 paginiAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Staycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityDocument10 paginiStaycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Ijaiem 2021 01 28 6Document9 paginiIjaiem 2021 01 28 6International Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Impact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryDocument8 paginiImpact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Performance of Short Transmission Line Using Mathematical MethodDocument8 paginiPerformance of Short Transmission Line Using Mathematical MethodInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- A Deep Learning Based Assistant For The Visually ImpairedDocument11 paginiA Deep Learning Based Assistant For The Visually ImpairedInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Anchoring of Inflation Expectations and Monetary Policy Transparency in IndiaDocument9 paginiAnchoring of Inflation Expectations and Monetary Policy Transparency in IndiaInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Synthetic Datasets For Myocardial Infarction Based On Actual DatasetsDocument9 paginiSynthetic Datasets For Myocardial Infarction Based On Actual DatasetsInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Design and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationDocument13 paginiDesign and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Swot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictDocument5 paginiSwot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- The Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaDocument5 paginiThe Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Altair Optistruct - Discrete Design VariableDocument13 paginiAltair Optistruct - Discrete Design VariableSantiago MolinaÎncă nu există evaluări
- EFM Format DefinitionDocument66 paginiEFM Format DefinitionFernando100% (1)
- Ai Slide Deck: Simple Presentation TemplateDocument8 paginiAi Slide Deck: Simple Presentation TemplateSyafik JaafarÎncă nu există evaluări
- Computer World November 8, 2010Document48 paginiComputer World November 8, 2010Korodi RazvanÎncă nu există evaluări
- Everything You Always Wanted To Know About JitterDocument8 paginiEverything You Always Wanted To Know About Jitterval9780Încă nu există evaluări
- TAC LAC Mapping SessionDocument10 paginiTAC LAC Mapping SessionVaibhav TiwariÎncă nu există evaluări
- C++ Variables: SyntaxDocument6 paginiC++ Variables: Syntaxprince12Încă nu există evaluări
- EnglishDocument102 paginiEnglishekgujjuÎncă nu există evaluări
- Mastering Async AwaitDocument56 paginiMastering Async AwaitAlexandre VasconcelosÎncă nu există evaluări
- SKM Automation Industry Technolgy: Mohamad Faiz Bin Mohd JabbarDocument4 paginiSKM Automation Industry Technolgy: Mohamad Faiz Bin Mohd Jabbarshafik jabbarÎncă nu există evaluări
- Acceptable Use PolicyDocument3 paginiAcceptable Use PolicysthoutirÎncă nu există evaluări
- Job Description Specialist Network Designer: Why BT?Document3 paginiJob Description Specialist Network Designer: Why BT?graf draculaÎncă nu există evaluări
- AuthorizationDocument9 paginiAuthorizationRuth VirtudazoÎncă nu există evaluări
- Automated Uv-C Disinfection Bin Using Arduino: University of Cebu Lapu Lapu and MandaueDocument27 paginiAutomated Uv-C Disinfection Bin Using Arduino: University of Cebu Lapu Lapu and MandaueAdelfa Mae BerdonÎncă nu există evaluări
- Sheet Metal Calculations: Bend AllowanceDocument10 paginiSheet Metal Calculations: Bend Allowancejim clarkÎncă nu există evaluări
- Day 10 MCQsDocument2 paginiDay 10 MCQsMaryum TariqÎncă nu există evaluări
- WEB TECH Lab ManualDocument64 paginiWEB TECH Lab ManualRathiÎncă nu există evaluări
- CAF Form PDFDocument2 paginiCAF Form PDFNaveen DÎncă nu există evaluări
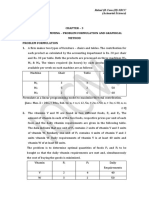
- Chapter - 3 Linear Programming - Problem Formulation and Graphical Method Problem Formulation 1. A Firm Makes Two Types of Furniture - Chairs and Tables. The Contribution ForDocument11 paginiChapter - 3 Linear Programming - Problem Formulation and Graphical Method Problem Formulation 1. A Firm Makes Two Types of Furniture - Chairs and Tables. The Contribution ForYamica ChopraÎncă nu există evaluări
- Labels and SelectorsDocument2 paginiLabels and SelectorsHarsha PrakashÎncă nu există evaluări
- 7960 791 (H)Document131 pagini7960 791 (H)Juan Riquelme HerreraÎncă nu există evaluări
- HUAWEI RAN MCI IRAN-QoS Plan Design V4Document20 paginiHUAWEI RAN MCI IRAN-QoS Plan Design V4Mehrdad GigiÎncă nu există evaluări
- Impact of Social Media On StudentsDocument3 paginiImpact of Social Media On Studentscaleb100% (1)
- ReviewerDocument7 paginiReviewerDiana Marie Vargas CariñoÎncă nu există evaluări
- Assembler Pass1aDocument2 paginiAssembler Pass1ashravan kumbharÎncă nu există evaluări
- Entrega de Productos Wings Mobile 16-09-2021Document19 paginiEntrega de Productos Wings Mobile 16-09-2021claudiaÎncă nu există evaluări
- On GSM Based Smart Energy MeterDocument17 paginiOn GSM Based Smart Energy MeterNithin PrakashÎncă nu există evaluări
- Unit 1 Spos NotesDocument23 paginiUnit 1 Spos Notes47-Rahul RAjpurohitÎncă nu există evaluări
- B-62630EN - Parameter Manual 16PB-18PB (GE)Document67 paginiB-62630EN - Parameter Manual 16PB-18PB (GE)Tuan TranÎncă nu există evaluări
- ISIMDocument14 paginiISIMFibonnaci BacktrackÎncă nu există evaluări