S-ar putea să vă placă și
- Section & Clearance PDFDocument1 paginăSection & Clearance PDFStephen BridgesÎncă nu există evaluări
- TRDocument1 paginăTRStephen BridgesÎncă nu există evaluări
- (Gob) 1zse 2750-102 en Rev 8Document24 pagini(Gob) 1zse 2750-102 en Rev 8Dante FilhoÎncă nu există evaluări
- Employee List with Names and Sr. NoDocument11.664 paginiEmployee List with Names and Sr. NoStephen BridgesÎncă nu există evaluări
- 220KV CABLE SPECDocument9 pagini220KV CABLE SPECanurag_pugaliaaÎncă nu există evaluări
- Bbit/Bptm: Busbar Insulating Tubing (5-35 KV)Document1 paginăBbit/Bptm: Busbar Insulating Tubing (5-35 KV)Stephen BridgesÎncă nu există evaluări
- Short Circuit Fault Transient Studies of Power Distribution Systems Including Dispersed GenerationDocument5 paginiShort Circuit Fault Transient Studies of Power Distribution Systems Including Dispersed Generationspk53Încă nu există evaluări
- Overall Summary of All Cables & Terminations Tested at Shree Power, Ras (August 2013)Document3 paginiOverall Summary of All Cables & Terminations Tested at Shree Power, Ras (August 2013)Stephen BridgesÎncă nu există evaluări
- High Volt Protection PDFDocument1 paginăHigh Volt Protection PDFStephen BridgesÎncă nu există evaluări
- 1.9.6 Cables Specifications (Type Designation-HT)Document2 pagini1.9.6 Cables Specifications (Type Designation-HT)anurag_pugaliaaÎncă nu există evaluări
- Raychem WCSM - Heavy Wall Adhesive Lined Heat Shrink: Product/Size Application Range A H A B W A B PDocument1 paginăRaychem WCSM - Heavy Wall Adhesive Lined Heat Shrink: Product/Size Application Range A H A B W A B PStephen BridgesÎncă nu există evaluări
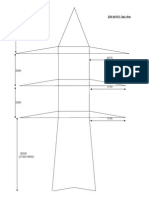
- 220kV Double Circuit Transmission Line Tower DesignDocument2 pagini220kV Double Circuit Transmission Line Tower DesignStephen BridgesÎncă nu există evaluări
- Tower ParticularsDocument20 paginiTower ParticularsStephen BridgesÎncă nu există evaluări
- RAYCHEM - EPKT Terminations: Termination Systems For Polymeric and MIND Paper Insulated Cables From 7.2kV Up To 36kVDocument1 paginăRAYCHEM - EPKT Terminations: Termination Systems For Polymeric and MIND Paper Insulated Cables From 7.2kV Up To 36kVStephen BridgesÎncă nu există evaluări
- 001 - Annexure 1 - Design ParametersDocument4 pagini001 - Annexure 1 - Design ParametersStephen BridgesÎncă nu există evaluări
- Calculation of Lightning Flashovers and Backflash Level ON 230Kv Transmission LinesDocument7 paginiCalculation of Lightning Flashovers and Backflash Level ON 230Kv Transmission LinesMahendra PatelÎncă nu există evaluări
- TS - 132KV Bus - 200 MsDocument10 paginiTS - 132KV Bus - 200 MsStephen BridgesÎncă nu există evaluări
- Table 7: Series Reactor and Shunt Capacitor BankDocument3 paginiTable 7: Series Reactor and Shunt Capacitor BankStephen BridgesÎncă nu există evaluări
- BWR-SPP DataformatDocument33 paginiBWR-SPP DataformatStephen BridgesÎncă nu există evaluări
- Generator Rswm2x23 MWDocument9 paginiGenerator Rswm2x23 MWStephen BridgesÎncă nu există evaluări
- Raipur CostDocument10 paginiRaipur CostStephen BridgesÎncă nu există evaluări
- TS - 132KV Bus - 200 MsDocument10 paginiTS - 132KV Bus - 200 MsStephen BridgesÎncă nu există evaluări
- 002 - Annexure 2 - Scope Parameters SheetDocument12 pagini002 - Annexure 2 - Scope Parameters SheetStephen BridgesÎncă nu există evaluări
- 2000 Ga Tech PaperDocument24 pagini2000 Ga Tech PaperAceel FitchÎncă nu există evaluări
- Si-COAT RTV Silicone Coating Superior PerformanceDocument5 paginiSi-COAT RTV Silicone Coating Superior PerformanceStephen BridgesÎncă nu există evaluări
- Tan Delta TestingDocument2 paginiTan Delta TestingNillutpal BoruahÎncă nu există evaluări
- 21403GA - DWG ModelDocument6 pagini21403GA - DWG ModelStephen BridgesÎncă nu există evaluări
- Design Basis Report PDFDocument27 paginiDesign Basis Report PDFStephen BridgesÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- LG dbrh190 dbrh197 dbrh198 dbrh199 d75 d77 SMDocument125 paginiLG dbrh190 dbrh197 dbrh198 dbrh199 d75 d77 SMgonga400Încă nu există evaluări
- 24lc21 KullanimiDocument8 pagini24lc21 KullanimiskiziltoprakÎncă nu există evaluări
- PDFDocument38 paginiPDFप्रमोद म्हसेÎncă nu există evaluări
- MECH433-Energy and The Environment IW 2012resit AnswersDocument11 paginiMECH433-Energy and The Environment IW 2012resit AnswersliverpoolengineerÎncă nu există evaluări
- GW Instek GPS-4303 Manual PDFDocument18 paginiGW Instek GPS-4303 Manual PDFElias ChavezÎncă nu există evaluări
- Adv 7513Document12 paginiAdv 75139183290782Încă nu există evaluări
- Power Supply PSC 12C 12 AmpDocument14 paginiPower Supply PSC 12C 12 AmpLeonardo ValienteÎncă nu există evaluări
- Embedded System Project - Khadija MuhammadDocument25 paginiEmbedded System Project - Khadija MuhammadKhadija JaanÎncă nu există evaluări
- Unit-I PN Junction Diode: 1.0 IntroductonDocument24 paginiUnit-I PN Junction Diode: 1.0 IntroductonSai PrajitÎncă nu există evaluări
- Cascade Controller For DCDC Buck ConvertorDocument6 paginiCascade Controller For DCDC Buck ConvertorCristóbal Eduardo Carreño MosqueiraÎncă nu există evaluări
- TP35Document4 paginiTP35abel sanchezÎncă nu există evaluări
- Measuring Current Using a GMR Sensor and Magnetic FieldDocument6 paginiMeasuring Current Using a GMR Sensor and Magnetic FieldManeesha WijesingheÎncă nu există evaluări
- Solar Powered Grass Cutting Robot Using IoTDocument20 paginiSolar Powered Grass Cutting Robot Using IoTDebashishParidaÎncă nu există evaluări
- RF3315DSDocument16 paginiRF3315DSRajneesh VermaÎncă nu există evaluări
- 10 Mosfet+CharacteristicsDocument5 pagini10 Mosfet+CharacteristicsKarthikKumarÎncă nu există evaluări
- LG 21sb2rge-Ts Chassis mc-059c PDFDocument29 paginiLG 21sb2rge-Ts Chassis mc-059c PDFKapila GunawardenaÎncă nu există evaluări
- Preview-Laptop Chip Level Repair Guide PDFDocument34 paginiPreview-Laptop Chip Level Repair Guide PDFIbrahim Alsaidi67% (12)
- An All-Digital PLL Clock Multiplier: M PD OSC FilterDocument4 paginiAn All-Digital PLL Clock Multiplier: M PD OSC FilterArun JyothiÎncă nu există evaluări
- Abhijeet Project PhysicsDocument14 paginiAbhijeet Project PhysicsAbhi YTÎncă nu există evaluări
- Tek 577-177 ServiceDocument196 paginiTek 577-177 Serviceakumar4u100% (3)
- Laboratory Report On MPMCDocument6 paginiLaboratory Report On MPMCSubham GhoshÎncă nu există evaluări
- M 2025B SP PDFDocument8 paginiM 2025B SP PDFFranz Erwin Gabriel FuentesÎncă nu există evaluări
- BJT Amplifier Biasing and Small Signal ModelDocument15 paginiBJT Amplifier Biasing and Small Signal ModelPriyantanuÎncă nu există evaluări
- SeminarDocument12 paginiSeminarAkshay Tiwari100% (1)
- BJT BasicsDocument19 paginiBJT BasicsAman SrivastavÎncă nu există evaluări
- Physics Project Thermistor Class 12Document14 paginiPhysics Project Thermistor Class 12shashaÎncă nu există evaluări
- Question Bank Mw-IDocument3 paginiQuestion Bank Mw-IgovindcoolÎncă nu există evaluări
- Circuit and PD Challenges at The 14nm Technology NodeDocument2 paginiCircuit and PD Challenges at The 14nm Technology NodeswethaswsankÎncă nu există evaluări
- Standard Cell LibraryDocument46 paginiStandard Cell LibraryAjay G BellamÎncă nu există evaluări
- Simulated Annealing For VLSI Cell PlacementDocument14 paginiSimulated Annealing For VLSI Cell PlacementAamodh KuthethurÎncă nu există evaluări