S-ar putea să vă placă și
- Control Engineering Compressed WatermarkDocument71 paginiControl Engineering Compressed WatermarkBasava RajÎncă nu există evaluări
- Open Loop SystemDocument4 paginiOpen Loop Systemumar almoqidÎncă nu există evaluări
- Control Engineering (10me82)Document122 paginiControl Engineering (10me82)bujangadp123Încă nu există evaluări
- controlICS CH1Document5 paginicontrolICS CH1Magarsaa Qana'iiÎncă nu există evaluări
- Unit-1 NotesDocument43 paginiUnit-1 NotesMD SHAHRIARMAHMUDÎncă nu există evaluări
- Topic 1: Introduction To Control System and Mathematical ReviewDocument43 paginiTopic 1: Introduction To Control System and Mathematical ReviewFaez FeakryÎncă nu există evaluări
- Chapter#1: 1. Basic Concept of Control SystemDocument14 paginiChapter#1: 1. Basic Concept of Control SystemMerie Ann DudangÎncă nu există evaluări
- FALLSEM2023-24 BECE302L TH VL2023240100269 2023-04-24 Reference-Material-IDocument5 paginiFALLSEM2023-24 BECE302L TH VL2023240100269 2023-04-24 Reference-Material-IRupam KunduÎncă nu există evaluări
- Control Systems Notes DEE M2 JuneDocument34 paginiControl Systems Notes DEE M2 JuneThairu MuiruriÎncă nu există evaluări
- Control System Engineering - IDocument212 paginiControl System Engineering - IAjit Kumar Kisku100% (1)
- Feedback Intro NotesDocument4 paginiFeedback Intro NotesChoco MeowMeowÎncă nu există evaluări
- Unit IDocument7 paginiUnit IanandhÎncă nu există evaluări
- Pe 3032wk1introductiontocontrolsystemmarch04e 141007091431 Conversion Gate01Document69 paginiPe 3032wk1introductiontocontrolsystemmarch04e 141007091431 Conversion Gate01OkingszackÎncă nu există evaluări
- Eee IV Control Systems 10es43 Notes PDFDocument124 paginiEee IV Control Systems 10es43 Notes PDFKiranjith KrishnanÎncă nu există evaluări
- Control Systems - 1Document18 paginiControl Systems - 1H. ZNADÎncă nu există evaluări
- Funda 1Document134 paginiFunda 1johnpaul varonaÎncă nu există evaluări
- Title: Introduction To Control System and Their Real Life Application and ExamplesDocument4 paginiTitle: Introduction To Control System and Their Real Life Application and ExampleskalimullahÎncă nu există evaluări
- Lecture Notes NewDocument76 paginiLecture Notes NewBethany LerewanuÎncă nu există evaluări
- Ece IV Control Systems (10es43) Notes1Document205 paginiEce IV Control Systems (10es43) Notes1Nithindev GuttikondaÎncă nu există evaluări
- Introduction PDFDocument7 paginiIntroduction PDFSandeep B RÎncă nu există evaluări
- Control Systems - NotesDocument61 paginiControl Systems - NotesNarasimha Murthy YayavaramÎncă nu există evaluări
- Control System 1Document29 paginiControl System 1Gabriel GalizaÎncă nu există evaluări
- Alvarez Johndave Bsece412 Ass#1Document4 paginiAlvarez Johndave Bsece412 Ass#1MelanieÎncă nu există evaluări
- EE2253 NotesDocument124 paginiEE2253 NotesSiva Kathikeyan100% (1)
- EE2253 - Control SystemsDocument124 paginiEE2253 - Control SystemsrameshsmeÎncă nu există evaluări
- Basics of Control Eng 1Document26 paginiBasics of Control Eng 1Hezron gibronÎncă nu există evaluări
- Control System FinalDocument200 paginiControl System FinalqwertyÎncă nu există evaluări
- FeedCon (Unit 1) PDFDocument17 paginiFeedCon (Unit 1) PDFAbby MacallaÎncă nu există evaluări
- Cpe 315 Feedback Control System LessonsDocument28 paginiCpe 315 Feedback Control System Lessonskeny amigableÎncă nu există evaluări
- IntroductionDocument39 paginiIntroductionMohd FazliÎncă nu există evaluări
- Rev. in Auto Contol SystemDocument2 paginiRev. in Auto Contol SystemChristopher AsuncionÎncă nu există evaluări
- Control System EngineeringDocument95 paginiControl System EngineeringAbdulrahmanÎncă nu există evaluări
- Lcs Unit 1 PDFDocument30 paginiLcs Unit 1 PDFRajasekhar AtlaÎncă nu există evaluări
- Chapter01 - Introduction To Control SystemDocument9 paginiChapter01 - Introduction To Control SystemNdidiamaka Nwosu AmadiÎncă nu există evaluări
- Control Systems NotesDocument74 paginiControl Systems NotesNirjal RanipaÎncă nu există evaluări
- Examples of Control Systems:: Lecture OneDocument4 paginiExamples of Control Systems:: Lecture OnemornyÎncă nu există evaluări
- Dynamical System ModelDocument47 paginiDynamical System ModelYeimy QuevedoÎncă nu există evaluări
- 1 Control - Systems - NotesDocument19 pagini1 Control - Systems - NotesTaku Teekay MatangiraÎncă nu există evaluări
- Ce Mod1Document22 paginiCe Mod1AYUSH CHANDRAÎncă nu există evaluări
- Linear Control System: Presented by Imran Basha SyedDocument35 paginiLinear Control System: Presented by Imran Basha SyedSyed Imran BashaÎncă nu există evaluări
- Feedback and Control Systems: Rezel A. Sto. Tomas, Ece 1Document10 paginiFeedback and Control Systems: Rezel A. Sto. Tomas, Ece 1kujong agacerÎncă nu există evaluări
- Introduction To Control Systems-Student-2021 - 2022 NewDocument885 paginiIntroduction To Control Systems-Student-2021 - 2022 NewAkpevwe Isire100% (1)
- Session 1 Introduction To Control Systems: Learning OutcomesDocument8 paginiSession 1 Introduction To Control Systems: Learning OutcomesJana DissanayakeÎncă nu există evaluări
- Control System Engineering (15A02303) : Lecture Note B.TechDocument126 paginiControl System Engineering (15A02303) : Lecture Note B.TechNAZMUS SAKIBÎncă nu există evaluări
- Introduction To Automatic ControlDocument10 paginiIntroduction To Automatic ControlFatih YıldızÎncă nu există evaluări
- EIE 412 Note 1Document51 paginiEIE 412 Note 1John DavidÎncă nu există evaluări
- W EE 418 - Lecture 1 Overview and IntroductionDocument56 paginiW EE 418 - Lecture 1 Overview and IntroductionGGAP LASTÎncă nu există evaluări
- LESSON1 IntroToControlSystemDocument10 paginiLESSON1 IntroToControlSystemalexancog456Încă nu există evaluări
- Unit I NotesDocument43 paginiUnit I Notesaravinth69601Încă nu există evaluări
- Control Systems NotesDocument152 paginiControl Systems Notesdarlachantisaideepthi450Încă nu există evaluări
- Control Systems NotesDocument133 paginiControl Systems Noteseee limatÎncă nu există evaluări
- Close & Open Loop SystemDocument6 paginiClose & Open Loop SystemAdonis NicolasÎncă nu există evaluări
- Control Systems NotesDocument50 paginiControl Systems NotesEEE CRRÎncă nu există evaluări
- Transfer Functions Examples Part 1Document21 paginiTransfer Functions Examples Part 1Gideon Moyo0% (1)
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresDe la EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresÎncă nu există evaluări
- Ida June 2011Document1 paginăIda June 2011Manasa Sathyanarayana SÎncă nu există evaluări
- PSSL Lab Cycle of Exp'sDocument3 paginiPSSL Lab Cycle of Exp'sManasa Sathyanarayana SÎncă nu există evaluări
- EE 1999 GATE QuestionsDocument14 paginiEE 1999 GATE QuestionsManasa Sathyanarayana SÎncă nu există evaluări
- PRT 1V5264175Document1 paginăPRT 1V5264175Manasa Sathyanarayana SÎncă nu există evaluări
- Chapter 2p5p5Document4 paginiChapter 2p5p5Manasa Sathyanarayana SÎncă nu există evaluări
- Lab Manual PDFDocument82 paginiLab Manual PDFManasa Sathyanarayana SÎncă nu există evaluări
- QUANTUM Q1000 Advanced ProtocolsDocument2 paginiQUANTUM Q1000 Advanced Protocolsgundala2000Încă nu există evaluări
- GT-8 ManualDocument100 paginiGT-8 Manualxxsamhalnxx5204Încă nu există evaluări
- Connecting To The Internet With Pico WDocument30 paginiConnecting To The Internet With Pico WKnut BoergeÎncă nu există evaluări
- ITC-3 Technical Description - 2020 PDFDocument24 paginiITC-3 Technical Description - 2020 PDFAndres Mtz CotaÎncă nu există evaluări
- I-Smell TechnologyDocument24 paginiI-Smell Technologyhimmatkanwar100% (3)
- Hp81110a ImpulsatoreDocument132 paginiHp81110a Impulsatorejack11rossiÎncă nu există evaluări
- Digital Mastermind Playbook EN - v4 20190902Document27 paginiDigital Mastermind Playbook EN - v4 20190902Pham Minh HoangÎncă nu există evaluări
- CMR Cloud Lab Guide CommunityDocument46 paginiCMR Cloud Lab Guide Communitykepke86Încă nu există evaluări
- Frizz Dual ManualDocument2 paginiFrizz Dual ManualManuel Francisco de PereaÎncă nu există evaluări
- IT Assistant: Job DescriptionDocument3 paginiIT Assistant: Job DescriptionMillionn GizawÎncă nu există evaluări
- Correspondence Between OHSAS 18001:2007, ISO 14001:2004 and ISO 9001:2000Document3 paginiCorrespondence Between OHSAS 18001:2007, ISO 14001:2004 and ISO 9001:2000Deni NoizÎncă nu există evaluări
- Thesis Submission Certificate FormatDocument6 paginiThesis Submission Certificate Formatmichellespragueplano100% (3)
- Test Drive Unlimited Manual Xbox360 ENDocument23 paginiTest Drive Unlimited Manual Xbox360 ENPatrick OliveiraÎncă nu există evaluări
- Spring Batch Tutorial - Reading Information From A FileDocument21 paginiSpring Batch Tutorial - Reading Information From A FileBala KulandaiÎncă nu există evaluări
- Aztec and Inca Civilization: Evidence of Science and Technology During Pre-Columbian TimeDocument25 paginiAztec and Inca Civilization: Evidence of Science and Technology During Pre-Columbian TimeJedadryon Dilla FernandezÎncă nu există evaluări
- CATALOG 2017 (Branch-Wise)Document33 paginiCATALOG 2017 (Branch-Wise)RajeevSangamÎncă nu există evaluări
- QuestionnaireDocument4 paginiQuestionnaireBishu BiswasÎncă nu există evaluări
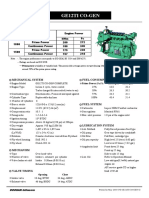
- Ge12ti Co Gen-GDocument2 paginiGe12ti Co Gen-GTilok DasÎncă nu există evaluări
- Electromagnetic Compatibility PDFDocument10 paginiElectromagnetic Compatibility PDFRedouane NaceriÎncă nu există evaluări
- Order Fulfilment PDFDocument21 paginiOrder Fulfilment PDFSaikumar SelaÎncă nu există evaluări
- Bab 2 - Coal Handling PlantDocument10 paginiBab 2 - Coal Handling PlantmasgrahaÎncă nu există evaluări
- Molex M-100 Catalog 1973Document28 paginiMolex M-100 Catalog 1973Tzouralas TheodorosÎncă nu există evaluări
- 1250Document1 pagină1250Mijin28Încă nu există evaluări
- Group 2 SpecificationsDocument13 paginiGroup 2 SpecificationsАлексейÎncă nu există evaluări
- Hospital Equipment and Its Management System A MinDocument4 paginiHospital Equipment and Its Management System A MinPaola LorenzattoÎncă nu există evaluări
- The COBIT 5 Processes Are Split Into Governance and ManagementDocument8 paginiThe COBIT 5 Processes Are Split Into Governance and ManagementdevmasterÎncă nu există evaluări
- My SQLDocument44 paginiMy SQLRachita RamanÎncă nu există evaluări
- TEMS Visualization - Analyzing UETRDocument22 paginiTEMS Visualization - Analyzing UETROkan IlkerÎncă nu există evaluări
- Blue Eyes Technology ReportDocument31 paginiBlue Eyes Technology ReportShubham Chauhan S.Încă nu există evaluări
- Concrete Pump TPIDocument1 paginăConcrete Pump TPIWakil AhmadÎncă nu există evaluări