S-ar putea să vă placă și
- Dimensionnement Axe Moteur PDFDocument8 paginiDimensionnement Axe Moteur PDFAymen BadriÎncă nu există evaluări
- Guide de Dimensionnement Les Actionneurs Rotatifs Et LinéairesDocument5 paginiGuide de Dimensionnement Les Actionneurs Rotatifs Et LinéairesmoicoyoteÎncă nu există evaluări
- Les Actionneurs Rotatifs Et Linéaires: Guide de DimensionnementDocument5 paginiLes Actionneurs Rotatifs Et Linéaires: Guide de Dimensionnementأسامة الدعميÎncă nu există evaluări
- Variateurs de Vitesse - de La Régulation Cascade À La Commande Vectorielle PSIMDocument55 paginiVariateurs de Vitesse - de La Régulation Cascade À La Commande Vectorielle PSIMBALLOUK Soufiane100% (4)
- Modelisation Et SimulationDocument11 paginiModelisation Et SimulationSofiene GuedriÎncă nu există evaluări
- Théorie Des TurbomachinesDocument9 paginiThéorie Des Turbomachines237 Md vuesÎncă nu există evaluări
- Commande Vectorielle RotoriqueDocument7 paginiCommande Vectorielle RotoriqueAbdesslam LokritiÎncă nu există evaluări
- BrahmiDocument5 paginiBrahmiabfstbmsodÎncă nu există evaluări
- MCC DynamiqueDocument8 paginiMCC DynamiqueHoussameAlexandre100% (1)
- Cours TaDocument25 paginiCours TaKara Reda100% (1)
- Commande Directe Du CoupleDocument5 paginiCommande Directe Du CoupleSidi LhajÎncă nu există evaluări
- TP N°01 PDFDocument11 paginiTP N°01 PDFBrahim GasbaouiÎncă nu există evaluări
- Examen 3ème 2013THSADocument14 paginiExamen 3ème 2013THSAAYA OUEZGANÎncă nu există evaluări
- tp°2COMMANDE VECTORILLE DIRACTEpdfDocument19 paginitp°2COMMANDE VECTORILLE DIRACTEpdfمكتبة الأمانيÎncă nu există evaluări
- Technologie Asservissement-Préparation Agreg InterneDocument179 paginiTechnologie Asservissement-Préparation Agreg InterneOmom chamarohÎncă nu există evaluări
- SLCI CorrecteursDocument13 paginiSLCI CorrecteursAbÎncă nu există evaluări
- Support1 (ApprocheMono)Document6 paginiSupport1 (ApprocheMono)MarwaEnnouriÎncă nu există evaluări
- (ModSLCI) (TD) Scoot Elec PDFDocument4 pagini(ModSLCI) (TD) Scoot Elec PDFLucas CaranoÎncă nu există evaluări
- Commande D'un Moteur À Courant ContinuDocument7 paginiCommande D'un Moteur À Courant Continuinsfp formatÎncă nu există evaluări
- TP 1 OmarDocument16 paginiTP 1 Omarzoubida sadoudiÎncă nu există evaluări
- Compte renduAMCDocument18 paginiCompte renduAMCMeryem AmzilÎncă nu există evaluări
- Chap 3 Loi Entree SortieDocument6 paginiChap 3 Loi Entree SortieSekhena SankhareÎncă nu există evaluări
- TP MCC PDFDocument5 paginiTP MCC PDFAek ZaiaekÎncă nu există evaluări
- TD-8 Hydraulique ProportionnelleDocument5 paginiTD-8 Hydraulique ProportionnellemounaÎncă nu există evaluări
- TP de TPM FinDocument17 paginiTP de TPM FinJuge “JMK” Mpanga kabojyaÎncă nu există evaluări
- Impact D'un Jet Sur Un ObstacleDocument11 paginiImpact D'un Jet Sur Un ObstacleElhoub Ayoub100% (3)
- CNC Si Tsi Ge 2017Document18 paginiCNC Si Tsi Ge 2017AYMANE ESSOUIRIÎncă nu există evaluări
- RobuRoc ProfDocument10 paginiRobuRoc ProfAbdelali YacoubiÎncă nu există evaluări
- MCC DynamiqueDocument8 paginiMCC DynamiqueDarkedgeÎncă nu există evaluări
- Asservissement de DébitDocument18 paginiAsservissement de DébitMohamed OuladÎncă nu există evaluări
- (Corslci) (TD) RoburocDocument9 pagini(Corslci) (TD) RoburocAbdelali YacoubiÎncă nu există evaluări
- TP 7 Etude Chaine Transmission Puissance PDFDocument22 paginiTP 7 Etude Chaine Transmission Puissance PDFAGBAÎncă nu există evaluări
- TD N2 Automatique-1Document4 paginiTD N2 Automatique-1dicherd MOUANDAÎncă nu există evaluări
- Spé Génie Électrique ATS Machine À Courant Continu: Exercice N°1: Choix D'une Motorisation de Chariot AutomatiséDocument3 paginiSpé Génie Électrique ATS Machine À Courant Continu: Exercice N°1: Choix D'une Motorisation de Chariot AutomatisésalmanassriÎncă nu există evaluări
- Systemes MecaniquesDocument6 paginiSystemes MecaniquesCheikh Abdoul Hakim BABOUÎncă nu există evaluări
- Choix Du Moteur Et ModulateurDocument9 paginiChoix Du Moteur Et ModulateurSaber HamdiÎncă nu există evaluări
- IST Commande Des Machines ELT3 140421 P2Document105 paginiIST Commande Des Machines ELT3 140421 P2Joël SebgoÎncă nu există evaluări
- CCP Sii MP 2018 SujetDocument20 paginiCCP Sii MP 2018 SujetSaad KingÎncă nu există evaluări
- 152 p26Document8 pagini152 p26miripefacebookÎncă nu există evaluări
- Oscillations DDocument8 paginiOscillations DAbdelaziz AbdelhamidÎncă nu există evaluări
- TP 6Document8 paginiTP 6Alex PefirekoÎncă nu există evaluări
- CH08 PDFDocument4 paginiCH08 PDFFarid AfifiÎncă nu există evaluări
- InertiesDocument3 paginiInertiesFlorianbrutusÎncă nu există evaluări
- Alterno DemarreurDocument32 paginiAlterno DemarreurMed Ali100% (1)
- Crs Regulation Et As Serv Is Semen TDocument9 paginiCrs Regulation Et As Serv Is Semen TUlrich NDJIKIÎncă nu există evaluări
- Transmissions Par Poulies Et Courroies - Sciences Et TechnologiesDocument14 paginiTransmissions Par Poulies Et Courroies - Sciences Et TechnologiesrachidaccÎncă nu există evaluări
- Cinematique TD3 PDFDocument3 paginiCinematique TD3 PDFEganÎncă nu există evaluări
- Régulation de Vitesse D'une Machine À Courant Continu À Excitation IndépendanteDocument7 paginiRégulation de Vitesse D'une Machine À Courant Continu À Excitation Indépendantejmroussel68% (19)
- VCDocument8 paginiVCiboussaÎncă nu există evaluări
- Chapitre - 1 - Etud - Systèmes - Energétiques - Turbo - MAchine LT - MIP - S6 - 2019 - 2020 PDFDocument7 paginiChapitre - 1 - Etud - Systèmes - Energétiques - Turbo - MAchine LT - MIP - S6 - 2019 - 2020 PDFKadet SizeÎncă nu există evaluări
- Asservissements TechnologieDocument152 paginiAsservissements Technologielopir120Încă nu există evaluări
- Automatique: Les Grands Articles d'UniversalisDe la EverandAutomatique: Les Grands Articles d'UniversalisÎncă nu există evaluări
- Dynamique: Les Grands Articles d'UniversalisDe la EverandDynamique: Les Grands Articles d'UniversalisÎncă nu există evaluări
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireDe la EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireEvaluare: 3.5 din 5 stele3.5/5 (3)
- Mobilités : changer de modèle: Solutions pour des déplacements bas carbone et équitablesDe la EverandMobilités : changer de modèle: Solutions pour des déplacements bas carbone et équitablesÎncă nu există evaluări
- Prothese Transtibiale 2013 Si PSIDocument31 paginiProthese Transtibiale 2013 Si PSIKhaled SouaissaÎncă nu există evaluări
- Prothese Transtibiale 2013 Si PSIDocument31 paginiProthese Transtibiale 2013 Si PSIKhaled SouaissaÎncă nu există evaluări
- Sciences Industrielles Pour L'Ingénieur I Filière TSIDocument22 paginiSciences Industrielles Pour L'Ingénieur I Filière TSIKhaled SouaissaÎncă nu există evaluări
- ACCOUPLEMENTS ELASTIQUES-ACCOUPLEMENTS RIGIDES Edition 102014 PDFDocument56 paginiACCOUPLEMENTS ELASTIQUES-ACCOUPLEMENTS RIGIDES Edition 102014 PDFKhaled SouaissaÎncă nu există evaluări
- 31 Accouplements PDFDocument9 pagini31 Accouplements PDFKhaled SouaissaÎncă nu există evaluări
- Dimensionnement Vis Boulons 2018Document60 paginiDimensionnement Vis Boulons 2018timÎncă nu există evaluări
- PDF skf19Document1.102 paginiPDF skf19wajdiÎncă nu există evaluări
- 3 PolycopDocument116 pagini3 PolycopYahiyaoui SofyaneÎncă nu există evaluări
- 02 MECA0444-EffortsTransmission PDFDocument64 pagini02 MECA0444-EffortsTransmission PDFKhaled SouaissaÎncă nu există evaluări
- (TDM) (CO) Theorie Des MecanismesDocument13 pagini(TDM) (CO) Theorie Des MecanismesKhaled SouaissaÎncă nu există evaluări
- Sujet VeloDocument10 paginiSujet VeloKhaled SouaissaÎncă nu există evaluări
- Dimensionnement Vis Boulons 2018Document60 paginiDimensionnement Vis Boulons 2018timÎncă nu există evaluări
- Les Accouplements PDFDocument28 paginiLes Accouplements PDFKhaled Souaissa100% (1)
- Catalogue BénéInox - Visserie & Boulonnerie - 2015Document420 paginiCatalogue BénéInox - Visserie & Boulonnerie - 2015ZorbanfrÎncă nu există evaluări
- Plaque TroueeDocument15 paginiPlaque TroueeKhaled SouaissaÎncă nu există evaluări
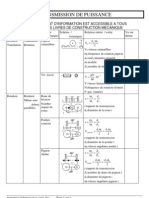
- Transmissiondepuissance CoursDocument2 paginiTransmissiondepuissance CoursntayoubÎncă nu există evaluări
- 4Document57 pagini4Max De Bangolo100% (1)
- Freins CoursDocument6 paginiFreins CoursKhaled SouaissaÎncă nu există evaluări
- Transmissions de Puissance PDFDocument6 paginiTransmissions de Puissance PDFKhaled SouaissaÎncă nu există evaluări
- Transmissions de Puissance PDFDocument6 paginiTransmissions de Puissance PDFKhaled SouaissaÎncă nu există evaluări
- Transmition de PuissanceDocument6 paginiTransmition de PuissanceEric LaqueilleÎncă nu există evaluări
- Cours D'hydrauliqueDocument33 paginiCours D'hydrauliqueSteph Akys80% (5)
- Boite de Vitesses AutomatiqueDocument33 paginiBoite de Vitesses Automatiquedrive7heart100% (2)
- TolerancesetajustementDocument10 paginiTolerancesetajustementKhaled SouaissaÎncă nu există evaluări
- Moteur / Engine: Commission Internationale de Karting - FiaDocument21 paginiMoteur / Engine: Commission Internationale de Karting - FiaKhaled SouaissaÎncă nu există evaluări
- Analyse FonctionnelleDocument72 paginiAnalyse FonctionnelleKhaled SouaissaÎncă nu există evaluări
- Commade WindowsDocument4 paginiCommade WindowsKhaled SouaissaÎncă nu există evaluări
- 1 Tme MM1Document4 pagini1 Tme MM1Rawdha ChrtÎncă nu există evaluări
- PréjuryDocument4 paginiPréjuryDavid MbataÎncă nu există evaluări
- Test Daeu B Maths2Document22 paginiTest Daeu B Maths2Moi BessetÎncă nu există evaluări
- s3 Math TP Test1Document4 paginis3 Math TP Test1Naim ChÎncă nu există evaluări
- 10 - Equations Diffã©rentielles Linã©aires D'ordre 1Document6 pagini10 - Equations Diffã©rentielles Linã©aires D'ordre 1lamloumiÎncă nu există evaluări
- Indices Et Séries Temporelles: ChapitreDocument89 paginiIndices Et Séries Temporelles: ChapitreabdelwahabÎncă nu există evaluări
- 217 Enigmes CréativesDocument160 pagini217 Enigmes Créativeskarmacoma156100% (1)
- A Comprea Comprehensive Review of Axial Flux Permanent Magnet Machineshensive Review of Axial Flux Permanent Magnet MachinesDocument15 paginiA Comprea Comprehensive Review of Axial Flux Permanent Magnet Machineshensive Review of Axial Flux Permanent Magnet MachinesأسامةبوعزيزÎncă nu există evaluări
- Manuel Ecopub Chap1 PDFDocument15 paginiManuel Ecopub Chap1 PDFnsombiÎncă nu există evaluări
- Cours Mecanique Des FluidesDocument53 paginiCours Mecanique Des FluidesNour-Eddine Gaaloul75% (4)
- Exercice 3Document5 paginiExercice 3Yannick NoahÎncă nu există evaluări
- Astrolabe 1Document52 paginiAstrolabe 1voncarl100% (1)
- Dossier Sujet CGM TU 2008Document14 paginiDossier Sujet CGM TU 2008spectrum66Încă nu există evaluări
- Corrigé Informatique Sections: Mathématiques, Sciences Expérimentales, Sciences Techniques Session Principale Baccalauréat 2017Document4 paginiCorrigé Informatique Sections: Mathématiques, Sciences Expérimentales, Sciences Techniques Session Principale Baccalauréat 2017hidra bedhiafiÎncă nu există evaluări
- Syllabus Excel 2016Document56 paginiSyllabus Excel 2016irina obreja100% (3)
- TD5 RDMDocument3 paginiTD5 RDMHossni OuhadouÎncă nu există evaluări
- Chapitre 5Document28 paginiChapitre 5GHISLAIN DORIAN TCHUENTE MONDJOÎncă nu există evaluări
- 5 BelarbiDocument9 pagini5 Belarbicompte professionnelÎncă nu există evaluări
- Equations Différentielles PDFDocument57 paginiEquations Différentielles PDFIMARÎncă nu există evaluări
- 2nde - Ex 1 - Découverte de La Translation - CORRIGEDocument2 pagini2nde - Ex 1 - Découverte de La Translation - CORRIGELena SerovaÎncă nu există evaluări
- PSI PHYSIQUE E3A 1 2010.extrait PDFDocument4 paginiPSI PHYSIQUE E3A 1 2010.extrait PDFLOUkmen BelÎncă nu există evaluări
- Cours Meth 1Document43 paginiCours Meth 1jouhaina nasriÎncă nu există evaluări
- Enonce 23Document1 paginăEnonce 23yves1ndriÎncă nu există evaluări
- TD2 Analyse3 SuitesDocument2 paginiTD2 Analyse3 SuitesKenny GayakpaÎncă nu există evaluări
- Finance Avancée+Document75 paginiFinance Avancée+The Best ChannelÎncă nu există evaluări
- Theorie Des Jeux - concLUDocument15 paginiTheorie Des Jeux - concLUaicha WassafrarÎncă nu există evaluări
- Chapitre II (Diagramme Unaire) 2015Document24 paginiChapitre II (Diagramme Unaire) 2015Chaouki67% (3)
- Le PointDocument4 paginiLe PointBaligh TrabelsiÎncă nu există evaluări
- Selcor 07Document5 paginiSelcor 07Lÿnçrë Mërss DoriÎncă nu există evaluări
- ESCRIBEME ARMONIA 10 - Trumpet in BB 1Document2 paginiESCRIBEME ARMONIA 10 - Trumpet in BB 1Félix Alberto Tapia GomezÎncă nu există evaluări