S-ar putea să vă placă și
- Integration of Green and Renewable Energy in Electric Power SystemsDe la EverandIntegration of Green and Renewable Energy in Electric Power SystemsÎncă nu există evaluări
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDe la EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsÎncă nu există evaluări
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977De la EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Încă nu există evaluări
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDe la EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsÎncă nu există evaluări
- Network Code For Requirements For Grid Connection Applicable To All GeneratorsDocument85 paginiNetwork Code For Requirements For Grid Connection Applicable To All GeneratorsEliza Maria CloteaÎncă nu există evaluări
- PSSE Stability Modeling Guideline For Inverter-Based DER 5MW or Greater Per NGRID-1-24-22Document18 paginiPSSE Stability Modeling Guideline For Inverter-Based DER 5MW or Greater Per NGRID-1-24-22bhargavÎncă nu există evaluări
- ML023030070 USNRC Power Plant Engineering 3Document170 paginiML023030070 USNRC Power Plant Engineering 3MutahirrasoolÎncă nu există evaluări
- The IEC 60255-121:2014 Standard and Its Impact On Performance Specification, Testing and Evaluation of Distance Protection RelaysDocument8 paginiThe IEC 60255-121:2014 Standard and Its Impact On Performance Specification, Testing and Evaluation of Distance Protection RelaysMohamed Daw HamoudaÎncă nu există evaluări
- Analysis of Methodologies For The Evaluation of Power Outage Costs PDFDocument5 paginiAnalysis of Methodologies For The Evaluation of Power Outage Costs PDFHachimenum AmadiÎncă nu există evaluări
- NDPLDocument27 paginiNDPLkaushal895Încă nu există evaluări
- Talking About HV Shunt Reactor Switching - EEPDocument5 paginiTalking About HV Shunt Reactor Switching - EEPa_mohid17Încă nu există evaluări
- Backup To Busbar Protection With Numerical Distance ProtectionDocument4 paginiBackup To Busbar Protection With Numerical Distance ProtectionTran Cong ThanhÎncă nu există evaluări
- PSS Tutorial Chapter Accelerating Power R2Document10 paginiPSS Tutorial Chapter Accelerating Power R2shuaibyesÎncă nu există evaluări
- Fdocuments - in Is 8478Document11 paginiFdocuments - in Is 8478chandu1821Încă nu există evaluări
- PSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLDocument9 paginiPSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLKurniawan Indra LeksanaÎncă nu există evaluări
- Micom Agile P841: Grid SolutionsDocument8 paginiMicom Agile P841: Grid SolutionsTaQuangDucÎncă nu există evaluări
- STATCOMDocument7 paginiSTATCOMALPHONCEÎncă nu există evaluări
- Descriptive Bulletin 242-32Document25 paginiDescriptive Bulletin 242-32mashan98Încă nu există evaluări
- Artificial Loading of Induction MotorsDocument6 paginiArtificial Loading of Induction Motorsamkeew100% (1)
- Shunt Reactor 0420101Document16 paginiShunt Reactor 0420101emy1188Încă nu există evaluări
- 7.21 Outdoor Bus StructuresDocument191 pagini7.21 Outdoor Bus StructuresEdyta MarzecÎncă nu există evaluări
- Static Synchronous Compensators STATCOMDocument4 paginiStatic Synchronous Compensators STATCOMrajfabÎncă nu există evaluări
- Chapter 1 - INTRODUCTIONDocument7 paginiChapter 1 - INTRODUCTIONMark Loyd ColoniaÎncă nu există evaluări
- Boosting The Reliability of Power System Models: Dong-Hyeon (DH) KimDocument4 paginiBoosting The Reliability of Power System Models: Dong-Hyeon (DH) Kimleorese100% (1)
- Voltage Stability With The Help of STATCOMDocument6 paginiVoltage Stability With The Help of STATCOMijsretÎncă nu există evaluări
- Analysis of The Root Causes of Transformer Bushing Failures PDFDocument6 paginiAnalysis of The Root Causes of Transformer Bushing Failures PDFElsonMilanÎncă nu există evaluări
- Siemens Power Engineering Guide 7E 54Document1 paginăSiemens Power Engineering Guide 7E 54mydearteacherÎncă nu există evaluări
- 2 - 3a Out-Of-Step Protection - TheoryDocument3 pagini2 - 3a Out-Of-Step Protection - Theoryrian0201Încă nu există evaluări
- 9 Transmission ReportDocument334 pagini9 Transmission ReportmanojÎncă nu există evaluări
- Power Network Protection and Automation GuideDocument152 paginiPower Network Protection and Automation GuidegirishvÎncă nu există evaluări
- KemaDocument32 paginiKemaMuhammadRaihanÎncă nu există evaluări
- Power Quality Improvement by Using STATCOM Control PDFDocument11 paginiPower Quality Improvement by Using STATCOM Control PDFيوسف خضر النسورÎncă nu există evaluări
- Comparison Booster TransformerDocument81 paginiComparison Booster TransformerRavi ReddyÎncă nu există evaluări
- Trasformatori SGBDocument24 paginiTrasformatori SGBst_calvoÎncă nu există evaluări
- 12 - Chapter 3Document102 pagini12 - Chapter 3Chaitanya Deshpande100% (1)
- 0600 C0050 0E Medium Voltage EbookDocument114 pagini0600 C0050 0E Medium Voltage EbookasssasasÎncă nu există evaluări
- PRM DesignGuideComplete v1Document257 paginiPRM DesignGuideComplete v1Sunil SinghÎncă nu există evaluări
- Fdocuments - in Pscad-ModelingDocument21 paginiFdocuments - in Pscad-ModelingniteshÎncă nu există evaluări
- Considerations RetroDocument5 paginiConsiderations RetroFari PratomosiwiÎncă nu există evaluări
- Ministry of Power NoteDocument12 paginiMinistry of Power NoteThe WireÎncă nu există evaluări
- Multilin: Synchronism Check EquipmentDocument26 paginiMultilin: Synchronism Check EquipmentĐức Nguyễn XuânÎncă nu există evaluări
- Manual Hi-Lo CO PDFDocument7 paginiManual Hi-Lo CO PDFLeonel Zavarizi NetoÎncă nu există evaluări
- Amted399086en (Web)Document180 paginiAmted399086en (Web)aleksandaralÎncă nu există evaluări
- PILC Cable Data Sheet PDFDocument2 paginiPILC Cable Data Sheet PDFbiglee82Încă nu există evaluări
- P220 PDFDocument12 paginiP220 PDFSatya VasuÎncă nu există evaluări
- A Survey of Cold Load Pickup PracticesDocument26 paginiA Survey of Cold Load Pickup PracticestunghtdÎncă nu există evaluări
- A STATCOM-Control Scheme For Grid Connected Wind Energy System For Power Quality ImprovementDocument15 paginiA STATCOM-Control Scheme For Grid Connected Wind Energy System For Power Quality Improvementk rajendraÎncă nu există evaluări
- Disclosure To Promote The Right To InformationDocument24 paginiDisclosure To Promote The Right To Informationmanzeera sharmaÎncă nu există evaluări
- On FACTSDocument33 paginiOn FACTSAravind Babu100% (1)
- Unbalanced Magnetic Pull Analysis For Rotordynamics of Induction MotorsDocument7 paginiUnbalanced Magnetic Pull Analysis For Rotordynamics of Induction Motors9096664279Încă nu există evaluări
- Volume - 2 of 3 - Package-2Document163 paginiVolume - 2 of 3 - Package-2Pranoy BaruaÎncă nu există evaluări
- International Standard: IEC 62539 IEEE 930Document9 paginiInternational Standard: IEC 62539 IEEE 930Brisner Acosta ValenciaÎncă nu există evaluări
- Ancillary Services in Power SystemsDocument5 paginiAncillary Services in Power SystemsNitakashi87Încă nu există evaluări
- 0 - A High-Voltage Fuse Tutorial and Application GuideDocument35 pagini0 - A High-Voltage Fuse Tutorial and Application GuideFerran MunyósÎncă nu există evaluări
- Real-Time Simulation Technology for Modern Power ElectronicsDe la EverandReal-Time Simulation Technology for Modern Power ElectronicsÎncă nu există evaluări
- Knowledge is "Real Power": Introduction to Power QualityDe la EverandKnowledge is "Real Power": Introduction to Power QualityÎncă nu există evaluări
- 3D Photovoltaic Devices Complete Self-Assessment GuideDe la Everand3D Photovoltaic Devices Complete Self-Assessment GuideÎncă nu există evaluări
- Perks and Allowance Option 2015-16Document1 paginăPerks and Allowance Option 2015-16Lalit ChoudharyÎncă nu există evaluări
- Example Calculation - Import Taxes For A Laptop, Iphone and CameraDocument4 paginiExample Calculation - Import Taxes For A Laptop, Iphone and CameraLalit ChoudharyÎncă nu există evaluări
- Techno Commercial Bid LayoutDocument1 paginăTechno Commercial Bid LayoutLalit ChoudharyÎncă nu există evaluări
- A Revenue Guide To Importing Goods Through The PostDocument12 paginiA Revenue Guide To Importing Goods Through The PostLalit ChoudharyÎncă nu există evaluări
- Frequently Asked Questions: Recruitment of Graduate Engineers Through Gate-2015Document4 paginiFrequently Asked Questions: Recruitment of Graduate Engineers Through Gate-2015Lalit ChoudharyÎncă nu există evaluări
- Case Study On Averting Distribution Transformers FailureDocument18 paginiCase Study On Averting Distribution Transformers FailureLalit ChoudharyÎncă nu există evaluări
- Frequently Asked Questions (Faqs)Document3 paginiFrequently Asked Questions (Faqs)Lalit ChoudharyÎncă nu există evaluări
- Shimla InfoDocument11 paginiShimla InfoLalit ChoudharyÎncă nu există evaluări
- Preliminary Inspection - Proforma - Repairs of Power TransformerDocument5 paginiPreliminary Inspection - Proforma - Repairs of Power TransformerLalit ChoudharyÎncă nu există evaluări
- NTPC - 3rd Week JanDocument1 paginăNTPC - 3rd Week JanLalit ChoudharyÎncă nu există evaluări
- ChalanDocument1 paginăChalanLalit ChoudharyÎncă nu există evaluări
- Sanskrit English DictionaryDocument168 paginiSanskrit English DictionarySN Wijesinhe50% (2)
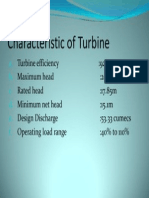
- Turbine ParametersDocument1 paginăTurbine ParametersLalit ChoudharyÎncă nu există evaluări
- TS EfficiencyDocument1 paginăTS EfficiencyLalit ChoudharyÎncă nu există evaluări
- Bajaj Kawasaki Kb-100Document74 paginiBajaj Kawasaki Kb-100Lalit ChoudharyÎncă nu există evaluări
- Tourist Attractions in RishikeshDocument7 paginiTourist Attractions in RishikeshLalit ChoudharyÎncă nu există evaluări
- Btech Round1 InstructionsDocument6 paginiBtech Round1 InstructionsLalit ChoudharyÎncă nu există evaluări
- Online Registration-Slip For B.Tech: Post Office, Chandanwadi, Prem Nagar Sudhowala, Dehradun (Uttarakhand) Pin - 248007Document1 paginăOnline Registration-Slip For B.Tech: Post Office, Chandanwadi, Prem Nagar Sudhowala, Dehradun (Uttarakhand) Pin - 248007Lalit ChoudharyÎncă nu există evaluări
- Result THDC Btech Ee 4sem 2013Document2 paginiResult THDC Btech Ee 4sem 2013Lalit ChoudharyÎncă nu există evaluări
- Uttrakhand Technical University, Dehradun: Helpdesk No.'s (10:00 AM To 06:00 PM)Document1 paginăUttrakhand Technical University, Dehradun: Helpdesk No.'s (10:00 AM To 06:00 PM)Lalit ChoudharyÎncă nu există evaluări
- Data Sheet 3VA1225-4EE32-0AA0: ModelDocument4 paginiData Sheet 3VA1225-4EE32-0AA0: ModelJagadeesan ShanmugamÎncă nu există evaluări
- What Is A FuseDocument11 paginiWhat Is A FuseAshutoshÎncă nu există evaluări
- Billing Summary Your Electric Usage Profile: How To Shop For ElectricityDocument4 paginiBilling Summary Your Electric Usage Profile: How To Shop For ElectricityВасилий ГорохÎncă nu există evaluări
- 5kw Off Grid System To Eng Morris PDFDocument16 pagini5kw Off Grid System To Eng Morris PDFarunghandwalÎncă nu există evaluări
- SchaffnerDocument66 paginiSchaffnerXabi AlonsoÎncă nu există evaluări
- Teslaaaaaaaaaaaaaaaaaaaaaaaa PDFDocument3 paginiTeslaaaaaaaaaaaaaaaaaaaaaaaa PDFKESH MusicÎncă nu există evaluări
- Manual On Protection of GEN and GEN Transformer and 220 KV and 400 KV Network CBIPDocument56 paginiManual On Protection of GEN and GEN Transformer and 220 KV and 400 KV Network CBIPMallikarjun Reddy92% (12)
- Standard Motor Control Line and Wiring DiagramsDocument36 paginiStandard Motor Control Line and Wiring Diagramsaugur886Încă nu există evaluări
- Wind Energy BasicsDocument7 paginiWind Energy Basicsraddyraj0% (1)
- 3-2 Analysis of A Power System in Per Unit: StepsDocument9 pagini3-2 Analysis of A Power System in Per Unit: Stepsحسن علي جاسمÎncă nu există evaluări
- DC To DC Buck and Boost ConverterDocument5 paginiDC To DC Buck and Boost ConverterR ABHISHEKÎncă nu există evaluări
- Work Power Energy Sindh Academy McqsDocument6 paginiWork Power Energy Sindh Academy McqsAnusha HussainÎncă nu există evaluări
- 02 CCDocument62 pagini02 CCsareluis2727Încă nu există evaluări
- GTP 33 KV CTCTS, PTs Upto 33KV, SMC Boxes, Deep Drawn Boxes, AB Switch, DO Fuse Set, Isolators, Hardware Fittings, Chemical Earthing, C&R Panels Upto 33KVDocument4 paginiGTP 33 KV CTCTS, PTs Upto 33KV, SMC Boxes, Deep Drawn Boxes, AB Switch, DO Fuse Set, Isolators, Hardware Fittings, Chemical Earthing, C&R Panels Upto 33KVSharafatÎncă nu există evaluări
- NTS Lesco Solved Test For The Post of Junior Engineer BS-17: General Knowledge PartDocument6 paginiNTS Lesco Solved Test For The Post of Junior Engineer BS-17: General Knowledge Partjhon smithÎncă nu există evaluări
- Saylors-Wind Farm Collector System GroundingDocument16 paginiSaylors-Wind Farm Collector System GroundingkcirrenwodÎncă nu există evaluări
- Power Management: GuideDocument57 paginiPower Management: GuidefgvgjhÎncă nu există evaluări
- Best Practice Manual-Transformers 44Document1 paginăBest Practice Manual-Transformers 44sunny_nsecÎncă nu există evaluări
- Zener Diode Voltage RegulatorDocument6 paginiZener Diode Voltage RegulatorDark bOYÎncă nu există evaluări
- Protective Relaying - An OverviewDocument59 paginiProtective Relaying - An OverviewGurmeet Singh100% (1)
- Manual de Peças C350Document78 paginiManual de Peças C350O mecanico75% (4)
- Energy Meters en 03-2016Document28 paginiEnergy Meters en 03-2016AnteÎncă nu există evaluări
- Fuji Lm2a Errors 1Document1 paginăFuji Lm2a Errors 1Pim KoedijkÎncă nu există evaluări
- 30AWH015HD9 Classe Energetica+EtiquetaDocument4 pagini30AWH015HD9 Classe Energetica+EtiquetalhdulofvfxqlwzocmcÎncă nu există evaluări
- FN 3410 Open FrameDocument6 paginiFN 3410 Open FrameVarun GuptaÎncă nu există evaluări
- 4C 5 HYB19 042 Presentation Liandrat Olivier PDFDocument17 pagini4C 5 HYB19 042 Presentation Liandrat Olivier PDFxiaowei tuÎncă nu există evaluări
- 2 Aie Vetar II Do IVDocument136 pagini2 Aie Vetar II Do IVmladen018Încă nu există evaluări
- A - V211x Voltage Protection Device: DescriptionDocument7 paginiA - V211x Voltage Protection Device: Descriptionwilian_suarezÎncă nu există evaluări
- OE Flyer Genset A5 01 16 LowDocument33 paginiOE Flyer Genset A5 01 16 LowCecep NanuÎncă nu există evaluări
- Syllabus of Jntu IV - I Psoc 08 Batch R 07Document2 paginiSyllabus of Jntu IV - I Psoc 08 Batch R 07Krishna Prasad100% (1)