S-ar putea să vă placă și
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109De la EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Încă nu există evaluări
- Localizacion Averias en MotoresDocument8 paginiLocalizacion Averias en MotoresJose AntonioÎncă nu există evaluări
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De la EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Evaluare: 5 din 5 stele5/5 (2)
- Localizacion de Averias Maquinas de CADocument11 paginiLocalizacion de Averias Maquinas de CAwilliam huaytaÎncă nu există evaluări
- Localización de Averías en Máquinas de Corriente AlternaDocument14 paginiLocalización de Averías en Máquinas de Corriente AlternadiegoÎncă nu există evaluări
- Localización de Averías en Motores-1Document10 paginiLocalización de Averías en Motores-1Rafael SernaÎncă nu există evaluări
- Localización de Averías en Máquinas de Corriente AlternaDocument9 paginiLocalización de Averías en Máquinas de Corriente AlternaJorge CorralesÎncă nu există evaluări
- Averías Maquinas CaDocument9 paginiAverías Maquinas Cavalquiria_13Încă nu există evaluări
- Guia (2) de Bobinado-Motores Trifasicos (Teorica)Document26 paginiGuia (2) de Bobinado-Motores Trifasicos (Teorica)Juan David LópezÎncă nu există evaluări
- Variación de VoltajeDocument6 paginiVariación de VoltajeAldo DanielÎncă nu există evaluări
- 26 - Proteccion para Cortocircuito en Vueltas de Una Misma Fase Del EstatorDocument8 pagini26 - Proteccion para Cortocircuito en Vueltas de Una Misma Fase Del EstatorhakashuÎncă nu există evaluări
- Unidad 5 Diagnostico y Deteccion de Fallas en Motores MonofasicosDocument11 paginiUnidad 5 Diagnostico y Deteccion de Fallas en Motores MonofasicosFranklin LunaÎncă nu există evaluări
- Averías en Motores Trifásicos de InducciónDocument43 paginiAverías en Motores Trifásicos de InducciónjesusbarajasÎncă nu există evaluări
- Growler DiagnosticoDocument13 paginiGrowler DiagnosticopeterÎncă nu există evaluări
- Diagnostico y Localizacion de Averias en MotoresDocument14 paginiDiagnostico y Localizacion de Averias en Motoresveak840% (1)
- Diagnostico de Fallas Más Comunes en Motores EléctricosDocument19 paginiDiagnostico de Fallas Más Comunes en Motores Eléctricos'Aguusz Gomez'0% (2)
- Mantenimiento y Reparacion de Maquinas Electricas de Corriente ContinuaDocument7 paginiMantenimiento y Reparacion de Maquinas Electricas de Corriente Continuaricardo alonsoÎncă nu există evaluări
- Fallas Comunes de Un Motor MonofásicoDocument4 paginiFallas Comunes de Un Motor MonofásicoArcos Zapata Isis Alejandra0% (1)
- Megado de Un Motor de Jaula de Ardilla y Medida Continuidad BobinasDocument3 paginiMegado de Un Motor de Jaula de Ardilla y Medida Continuidad BobinasJose Leornardo CondoriÎncă nu există evaluări
- Motor Jaula Ardilla Corriente Alterna Trifasico Problemas Soluciones 48079 CompletoDocument14 paginiMotor Jaula Ardilla Corriente Alterna Trifasico Problemas Soluciones 48079 CompletoLopez Ramirez Guadalupe JoseÎncă nu există evaluări
- Curso Motor de Jaula de ArdillaDocument12 paginiCurso Motor de Jaula de ArdillawuwuchaÎncă nu există evaluări
- Cómo Revisar Un Motor EléctricoDocument8 paginiCómo Revisar Un Motor EléctricoKevin RiveraÎncă nu există evaluări
- Averias de Motores en Corriente ContinuaDocument4 paginiAverias de Motores en Corriente ContinuastevensialerÎncă nu există evaluări
- Megado de Un Motor de Jaula de Ardilla y Medida Continuidad BobinasDocument4 paginiMegado de Un Motor de Jaula de Ardilla y Medida Continuidad BobinasCarlos Huayta AsencioÎncă nu există evaluări
- Cálculo de La Cadena de AisladoresDocument7 paginiCálculo de La Cadena de AisladoresGrober QuispeÎncă nu există evaluări
- Averias y Mantenimiento de Maquinas ElectricasDocument21 paginiAverias y Mantenimiento de Maquinas ElectricasS .D.TÎncă nu există evaluări
- Averías y Mantenimiento de Máquinas Eléctricas - 2da ParteDocument27 paginiAverías y Mantenimiento de Máquinas Eléctricas - 2da ParteS .D.TÎncă nu există evaluări
- Motores de Corriente ContinuaDocument8 paginiMotores de Corriente ContinuaAlirio Ramirez VelasquezÎncă nu există evaluări
- Diagnóstico de Condiciones de Los ComponentesDocument4 paginiDiagnóstico de Condiciones de Los Componentesbrayan solisÎncă nu există evaluări
- Motor de Inducción Trifásico Rotor BobinadoDocument22 paginiMotor de Inducción Trifásico Rotor Bobinadoenrique chavestaÎncă nu există evaluări
- Manual de ReparacionesDocument48 paginiManual de ReparacionesHarumi CabreraÎncă nu există evaluări
- Fusibles QuemadosDocument9 paginiFusibles QuemadosEmerson Emilio Chuy SequenÎncă nu există evaluări
- Fallas de Maquinas ElectricasDocument2 paginiFallas de Maquinas ElectricasMiguel AnaluisaÎncă nu există evaluări
- Averias de Motores y Sus SolucionesDocument10 paginiAverias de Motores y Sus Solucionesstevensialer100% (1)
- Trabajo Motor Asincrono ListoDocument10 paginiTrabajo Motor Asincrono ListoCamila Del PilarÎncă nu există evaluări
- Fallas Comunes en Motores ElectricosDocument8 paginiFallas Comunes en Motores ElectricoswilsonÎncă nu există evaluări
- 6 Localización de Averías y PreparaciónDocument7 pagini6 Localización de Averías y PreparaciónMaxi BustosÎncă nu există evaluări
- 7 Protecciones de Sistemas Electricos de Potencia Delaurens Alvarez Jrge Oriol 9cDocument11 pagini7 Protecciones de Sistemas Electricos de Potencia Delaurens Alvarez Jrge Oriol 9cJorge DelaurensÎncă nu există evaluări
- MacharoDocument9 paginiMacharodamianÎncă nu există evaluări
- Mantenimiento Motores RotativosDocument7 paginiMantenimiento Motores RotativosRicardo CondeÎncă nu există evaluări
- Guia-Motores MonofasicosDocument35 paginiGuia-Motores Monofasicosp_guzmanrlÎncă nu există evaluări
- Electricidad - Electricitat - Megado de Un Motor de Jaula de Ardilla y Medida Continuidad BobinasDocument9 paginiElectricidad - Electricitat - Megado de Un Motor de Jaula de Ardilla y Medida Continuidad BobinasAnonymous FqWJo7Încă nu există evaluări
- Falla de Motores 1Document8 paginiFalla de Motores 1salcedopozasÎncă nu există evaluări
- Pruebas Al Generador ElectricoDocument13 paginiPruebas Al Generador ElectricoJbhÎncă nu există evaluări
- Carta de PresentacionDocument9 paginiCarta de Presentacionvictor miguelÎncă nu există evaluări
- Pruebas Estáticas y Diagnóstico Del EstadoDocument3 paginiPruebas Estáticas y Diagnóstico Del EstadomuahdibÎncă nu există evaluări
- Motor Trifasico InformeDocument12 paginiMotor Trifasico InformeKatherin PinzonÎncă nu există evaluări
- Mediciones de Motor de ArranqueDocument21 paginiMediciones de Motor de Arranquehary diegues50% (2)
- Clasificacion, Pruebas y FallasDocument5 paginiClasificacion, Pruebas y FallasGustavo Gomez PozosÎncă nu există evaluări
- Rebobinado de Motores Monofásicos de Corriente AlternaDocument9 paginiRebobinado de Motores Monofásicos de Corriente AlternaGerardo GuzmanÎncă nu există evaluări
- Práctica AlternadorDocument22 paginiPráctica Alternadormhmd2009Încă nu există evaluări
- El Motor de Inducción Trifásico Rotor DevanadoDocument14 paginiEl Motor de Inducción Trifásico Rotor DevanadoRicky Mclaughlin100% (19)
- Motor Trifasico 10 HP MarcaDocument6 paginiMotor Trifasico 10 HP MarcaMijail TellezÎncă nu există evaluări
- Motor de Rotor DevanadoDocument8 paginiMotor de Rotor DevanadoOscar FloresÎncă nu există evaluări
- Unidad 2 Motores de CA y CDDocument84 paginiUnidad 2 Motores de CA y CDAldo FernándezÎncă nu există evaluări
- Eepq3 Generador SincronicoDocument37 paginiEepq3 Generador SincronicoHenry LiraÎncă nu există evaluări
- Electricidad 1Document9 paginiElectricidad 1yulis del carmen oviedo caicedoÎncă nu există evaluări
- 5diagnóstico Eléctrico de MotoresDocument6 pagini5diagnóstico Eléctrico de MotoresEdwin rodriguezÎncă nu există evaluări
- Alternador Pruebas y Mantenimiento PDFDocument10 paginiAlternador Pruebas y Mantenimiento PDFRamon pujolsÎncă nu există evaluări
- Alternador Pruebas y Mantenimiento PDFDocument10 paginiAlternador Pruebas y Mantenimiento PDFBlack KaiÎncă nu există evaluări
- SG402 PDFDocument28 paginiSG402 PDFnavegante20002003Încă nu există evaluări
- Plástico Dentro Del Plástico Pondrás La Estampa de La Imagen) Entonces La Cajetilla de CigarrilloDocument2 paginiPlástico Dentro Del Plástico Pondrás La Estampa de La Imagen) Entonces La Cajetilla de Cigarrillonavegante20002003Încă nu există evaluări
- SG402 PDFDocument28 paginiSG402 PDFnavegante20002003Încă nu există evaluări
- Runas 22-1-32Document32 paginiRunas 22-1-32navegante20002003100% (1)
- Colección de Tiradas Clásicas de Tarot PDFDocument8 paginiColección de Tiradas Clásicas de Tarot PDFAlexanderÎncă nu există evaluări
- FT Doppio SG 402 020817 PDFDocument2 paginiFT Doppio SG 402 020817 PDFnavegante20002003Încă nu există evaluări
- Proyecto MetatronDocument57 paginiProyecto MetatronZuleimaÎncă nu există evaluări
- SG402 PDFDocument28 paginiSG402 PDFnavegante20002003Încă nu există evaluări
- FT Doppio SG 402 020817Document2 paginiFT Doppio SG 402 020817navegante20002003Încă nu există evaluări
- Comic MAntoniaDocument22 paginiComic MAntoniaartefeministaÎncă nu există evaluări
- FT Doppio SG 402 020817 PDFDocument2 paginiFT Doppio SG 402 020817 PDFnavegante20002003Încă nu există evaluări
- Por La Senda de Lucifer - Editorial de La Casa de TharsisDocument181 paginiPor La Senda de Lucifer - Editorial de La Casa de TharsisPablo Adolfo Santa Cruz de la Vega95% (37)
- FT Doppio SG 402 020817 PDFDocument2 paginiFT Doppio SG 402 020817 PDFnavegante20002003Încă nu există evaluări
- Oraculo Lenormand Cartas y Tiradas 140705123025 Phpapp02Document112 paginiOraculo Lenormand Cartas y Tiradas 140705123025 Phpapp02CarlaFerreiraÎncă nu există evaluări
- Capacitor de MarchaDocument61 paginiCapacitor de Marchanavegante2000200383% (6)
- Manual Del DivorcioDocument550 paginiManual Del DivorcioOmalimusik Tapia100% (1)
- Tiradas CombinadasDocument9 paginiTiradas Combinadasnavegante20002003Încă nu există evaluări
- Pautas de La Santa MuerteDocument3 paginiPautas de La Santa Muertenavegante20002003100% (1)
- Regardie Israel - Un Jardin de GranadasDocument165 paginiRegardie Israel - Un Jardin de GranadasCB3100% (4)
- La Biblia de Los CristalesDocument200 paginiLa Biblia de Los CristalesTatiana Trejo87% (136)
- Informacion BsicaDocument24 paginiInformacion Bsicanavegante20002003Încă nu există evaluări
- Dowling Levi - El Evangelio Acuario de Jesus El CristoDocument377 paginiDowling Levi - El Evangelio Acuario de Jesus El CristoDon Epifanio100% (1)
- Tiradas de Cartas MixtasDocument325 paginiTiradas de Cartas Mixtasnavegante20002003100% (2)
- Curso de Las Magia de Las RunasDocument71 paginiCurso de Las Magia de Las Runasnavegante2000200367% (3)
- Brujula y OrientacionDocument29 paginiBrujula y OrientacionzapatafÎncă nu există evaluări
- Enciclopedia de Los Nudos - Cristian Biosca Rolland (Redux)Document157 paginiEnciclopedia de Los Nudos - Cristian Biosca Rolland (Redux)navegante20002003100% (2)
- Tecnicadecuerdasynudos EsofaDocument178 paginiTecnicadecuerdasynudos Esofanavegante20002003Încă nu există evaluări
- Principios de Geomancia Astrologica Franz HartmannDocument180 paginiPrincipios de Geomancia Astrologica Franz Hartmanncitico100% (1)
- Enciclopedia de Los Nudos - Cristian Biosca Rolland (Redux)Document157 paginiEnciclopedia de Los Nudos - Cristian Biosca Rolland (Redux)navegante20002003100% (2)
- Curso de BrujulaDocument14 paginiCurso de Brujulabarrabas01Încă nu există evaluări
- Formatos de Un Centro de Cómputo PDFDocument27 paginiFormatos de Un Centro de Cómputo PDFSergio Abarca HernándezÎncă nu există evaluări
- Aprendiendo Matematica - Lectura y Escritura Numeros de 4 CifrasDocument10 paginiAprendiendo Matematica - Lectura y Escritura Numeros de 4 Cifrasjohn diazÎncă nu există evaluări
- PerforaciondemolicionDocument9 paginiPerforaciondemolicionJESUS ARTURO SANTIAGO GERONIMOÎncă nu există evaluări
- Katherina Toledo - UNIDAD #1Document15 paginiKatherina Toledo - UNIDAD #1Kati ToledoÎncă nu există evaluări
- Introdución Al Curso de Html5Document36 paginiIntrodución Al Curso de Html5manuelbucaroÎncă nu există evaluări
- Capacitacion Rgo Electrico BasicoDocument66 paginiCapacitacion Rgo Electrico Basicodiana villalobos100% (1)
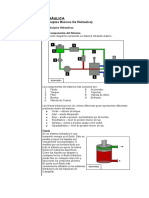
- Identificacion de Montaje HidráulicoDocument4 paginiIdentificacion de Montaje HidráulicochachincinÎncă nu există evaluări
- Roca SelloDocument37 paginiRoca SelloJuan ZhdÎncă nu există evaluări
- Practica 3. HidrocoheteDocument4 paginiPractica 3. HidrocoheteDany Garcia100% (1)
- Arte 1 PDFDocument66 paginiArte 1 PDFGermaín SuárezÎncă nu există evaluări
- ZEGEL IPAE TesisDocument21 paginiZEGEL IPAE TesisJorge Abogado Chafloque0% (2)
- Ficha RimulaDocument2 paginiFicha RimulaAlfredo PachecoÎncă nu există evaluări
- Práctica 8 - Motor Asincrónico Con CargaDocument8 paginiPráctica 8 - Motor Asincrónico Con CargaCamilo VelandiaÎncă nu există evaluări
- Manual Amd Construyequipos Sas 2019Document60 paginiManual Amd Construyequipos Sas 2019Milena MontañezÎncă nu există evaluări
- Ak110 SDocument29 paginiAk110 SclaretÎncă nu există evaluări
- III - Bases ExcéntricasDocument32 paginiIII - Bases ExcéntricasNicolas FernandezÎncă nu există evaluări
- 5.0 - Pasos para El Desmontaje y El Montaje de Un PCDocument1 pagină5.0 - Pasos para El Desmontaje y El Montaje de Un PCSandra Liliana BerrioÎncă nu există evaluări
- Examen Final Modulo AdministraciónDocument6 paginiExamen Final Modulo AdministraciónJhonny Almonacid GranadozÎncă nu există evaluări
- Closet CarpinteriaDocument20 paginiCloset CarpinteriaBryan Moreno Ovando0% (1)
- Lista Salud 2022Document2 paginiLista Salud 2022MarcoAntonioSTÎncă nu există evaluări
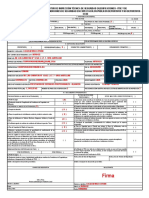
- Solicitud Itse-ModeloDocument1 paginăSolicitud Itse-ModeloJorge MartinÎncă nu există evaluări
- Practica No. 4 Dinamica de FluidosDocument5 paginiPractica No. 4 Dinamica de Fluidosbraulio tobar100% (1)
- Evaluacion 3 Gestion de Negocios Bajo Ambiente ERP (Diurno)Document3 paginiEvaluacion 3 Gestion de Negocios Bajo Ambiente ERP (Diurno)Macarena MuñozÎncă nu există evaluări
- Guia 2Document4 paginiGuia 2Cristian Jose Mejïa RicőÎncă nu există evaluări
- 2-Presupuesto ISLA IQUITOS Redes Secundarias Rev.98Document36 pagini2-Presupuesto ISLA IQUITOS Redes Secundarias Rev.98أدريانرودريجيزÎncă nu există evaluări
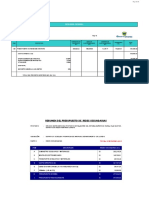
- Em-Fo-05-001 - Chancadora SecundarioDocument1 paginăEm-Fo-05-001 - Chancadora SecundarioGianella Xenia Cisneros MartinezÎncă nu există evaluări
- Trabajo de Abdon (Sistema)Document13 paginiTrabajo de Abdon (Sistema)Club-Defensor Familia-CastillonÎncă nu există evaluări
- Lic PatronDocument1 paginăLic PatronLuis DominguezÎncă nu există evaluări
- Analisis de Precios UnitariosDocument70 paginiAnalisis de Precios Unitariosjoaquin rodriguez oreÎncă nu există evaluări
- Construccion de Vereda Peatonal (156 M) - Zona de Estacionamiento ExteriorDocument2 paginiConstruccion de Vereda Peatonal (156 M) - Zona de Estacionamiento ExteriorAlexander CheroÎncă nu există evaluări
- Arizona, Utah & New Mexico: A Guide to the State & National ParksDe la EverandArizona, Utah & New Mexico: A Guide to the State & National ParksEvaluare: 4 din 5 stele4/5 (1)
- Japanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensDe la EverandJapanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensÎncă nu există evaluări
- The Bahamas a Taste of the Islands ExcerptDe la EverandThe Bahamas a Taste of the Islands ExcerptEvaluare: 4 din 5 stele4/5 (1)
- Naples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoDe la EverandNaples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoEvaluare: 5 din 5 stele5/5 (1)
- New York & New Jersey: A Guide to the State & National ParksDe la EverandNew York & New Jersey: A Guide to the State & National ParksÎncă nu există evaluări
- South Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptDe la EverandSouth Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptEvaluare: 5 din 5 stele5/5 (1)