S-ar putea să vă placă și
- Esercitazione Controlli Automatici N°3Document13 paginiEsercitazione Controlli Automatici N°3Alessandro PilloniÎncă nu există evaluări
- Risposta in FrequenzazaDocument3 paginiRisposta in FrequenzazaStefano BozzaÎncă nu există evaluări
- Esercitazioni Nettuno - Parte 1Document70 paginiEsercitazioni Nettuno - Parte 1Alessandra IzzoÎncă nu există evaluări
- Amplificatore Di Bassa Frequenza A BJTDocument11 paginiAmplificatore Di Bassa Frequenza A BJTCenci SimoneÎncă nu există evaluări
- Esercizi Svolti Diagramma Di BodeDocument10 paginiEsercizi Svolti Diagramma Di BodecalailÎncă nu există evaluări
- Prova Di Laboratorio 3Document10 paginiProva Di Laboratorio 3Lorenzo Maria MASELLIÎncă nu există evaluări
- Progetto Di Controlli AutomaticiDocument13 paginiProgetto Di Controlli AutomaticiLuca NanniÎncă nu există evaluări
- TentativiDocument7 paginiTentativiNoemi SkizzataÎncă nu există evaluări
- Esercizi Ec2 Sedra SmithDocument51 paginiEsercizi Ec2 Sedra SmithLudovica AcciaiÎncă nu există evaluări
- Cap 5 - Oscillatori e MultivibratoriDocument38 paginiCap 5 - Oscillatori e MultivibratoriStefano Della PennaÎncă nu există evaluări
- BJT Base ComuneDocument7 paginiBJT Base ComunePaolo RossiÎncă nu există evaluări
- Amplificatori Operazionali 1Document11 paginiAmplificatori Operazionali 1Stefano PaoliÎncă nu există evaluări
- Esercizi DiversitàDocument26 paginiEsercizi DiversitàYehya HamdanÎncă nu există evaluări
- Riassunto ElettronicaDocument29 paginiRiassunto ElettronicaGiacomo Del PratoÎncă nu există evaluări
- 4.amplificatori A TransistorsDocument18 pagini4.amplificatori A TransistorsSaverio MazzaÎncă nu există evaluări
- 2011 Elettronica SoluzioneDocument3 pagini2011 Elettronica SoluzioneAntonioÎncă nu există evaluări
- Bianchini Bode myDAQDocument14 paginiBianchini Bode myDAQIsacco BianchiniÎncă nu există evaluări
- Tesina Elettronica MicroondeDocument11 paginiTesina Elettronica MicroondeAndrea MencaroniÎncă nu există evaluări
- BJT Collettore ComuneDocument8 paginiBJT Collettore ComunePaolo RossiÎncă nu există evaluări
- Formulario Di Comunicazioni ElettricheDocument25 paginiFormulario Di Comunicazioni ElettricheGiuseppe MoreseÎncă nu există evaluări
- Diagrammi Di BodeDocument30 paginiDiagrammi Di BodeElisabetta BrunoÎncă nu există evaluări
- OperazionaliDocument12 paginiOperazionaliMarco FunaroÎncă nu există evaluări
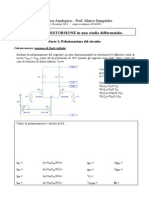
- Elettronica AnalogicaDocument22 paginiElettronica AnalogicaLuigi ReveruzziÎncă nu există evaluări
- Formulario ControlliDocument6 paginiFormulario Controllicommon2909Încă nu există evaluări
- Filtri CON RLDocument8 paginiFiltri CON RLFilippo CastelliÎncă nu există evaluări
- Relazione OscillatoreDocument9 paginiRelazione OscillatoreMattia TreppiediÎncă nu există evaluări
- RDL 1 - 2 - Rilievo Della Curva Di Risposta in Frequenza Di Un Filtro C-RPassa AltoDocument15 paginiRDL 1 - 2 - Rilievo Della Curva Di Risposta in Frequenza Di Un Filtro C-RPassa Altoleonardo contiÎncă nu există evaluări
- Elettronica Di PotenzaDocument67 paginiElettronica Di PotenzaLara MunforteÎncă nu există evaluări
- Filtri AttiviDocument13 paginiFiltri Attivialeman87Încă nu există evaluări
- BootstrapDocument5 paginiBootstrapPaolo RossiÎncă nu există evaluări
- Filtri Rev002Document14 paginiFiltri Rev002Mariangela CostabileÎncă nu există evaluări
- 2 - Sistemi Elettronici A Radio-Frequenza (PLL 2 ORDINE) - 8 PDFDocument8 pagini2 - Sistemi Elettronici A Radio-Frequenza (PLL 2 ORDINE) - 8 PDFsascia_1775Încă nu există evaluări
- Esercitazione Di Controlli Automatici 1 - N°7Document23 paginiEsercitazione Di Controlli Automatici 1 - N°7Alessandro PilloniÎncă nu există evaluări
- Analisi Vettoriale - Gradiente, Divergenza, RotoreDocument15 paginiAnalisi Vettoriale - Gradiente, Divergenza, RotorejumapamoÎncă nu există evaluări
- Esperienza Sull'integratore RealeDocument4 paginiEsperienza Sull'integratore RealearturoÎncă nu există evaluări
- Progetto AutomaticaDocument6 paginiProgetto AutomaticaCiccio GattoÎncă nu există evaluări
- PLL e Fine Tuning CircuitDocument42 paginiPLL e Fine Tuning Circuitmanuel_papaÎncă nu există evaluări
- Lezione 14-15Document12 paginiLezione 14-15Simone La BellaÎncă nu există evaluări
- Laboratorio Elettronica Analogica Marco SampietroDocument9 paginiLaboratorio Elettronica Analogica Marco Sampietroyoghi07Încă nu există evaluări
- Tempi Di Propagazione Di Una Porta LogicaDocument5 paginiTempi Di Propagazione Di Una Porta LogicaAndrea PierdominiciÎncă nu există evaluări
- Derivatori e IntegratoriDocument4 paginiDerivatori e IntegratoriOrtensia Del LagoÎncă nu există evaluări
- Formulario + Tavole PDFDocument25 paginiFormulario + Tavole PDFMarco MirabellaÎncă nu există evaluări
- Reattori A Mescolamento Imperfetto - Analisi RTDDocument8 paginiReattori A Mescolamento Imperfetto - Analisi RTDEnrico MezzariÎncă nu există evaluări
- Esercizi Di Progetto Di ElettronicaDocument20 paginiEsercizi Di Progetto Di ElettronicaGiovanni ViciconteÎncă nu există evaluări
- Quantizzazione AudioDocument21 paginiQuantizzazione AudioAlexÎncă nu există evaluări
- Misura Di Angoli e Teodolite - 2Document20 paginiMisura Di Angoli e Teodolite - 2ArmandoCastelluccioÎncă nu există evaluări
- Esercizi SvoltiDocument20 paginiEsercizi Svoltipeter_rungaldienÎncă nu există evaluări
- 01-Filtri RLC e RisonanzaDocument31 pagini01-Filtri RLC e RisonanzaFilippo CastelliÎncă nu există evaluări
- 03 - Filtri PassiviDocument10 pagini03 - Filtri Passivim_i_Încă nu există evaluări
- Esercitazione 1 - DiodiDocument13 paginiEsercitazione 1 - DiodiYoussef AboullaitÎncă nu există evaluări
- Dispense LabCF 2014 Ridotto 0Document239 paginiDispense LabCF 2014 Ridotto 0DeejayLupinÎncă nu există evaluări
- DISPENSE Di Controlli Automatici - G. MarroDocument40 paginiDISPENSE Di Controlli Automatici - G. MarroDomenico Rafti100% (1)
- Tesina Micro e Nano4Document36 paginiTesina Micro e Nano4Michele PaolettiÎncă nu există evaluări
- Raddrizzatori A DiodiDocument45 paginiRaddrizzatori A DiodiCristian BandilaÎncă nu există evaluări
- Esercizi Proposti Su Acquisizione DatiDocument43 paginiEsercizi Proposti Su Acquisizione Daticlapaeri100% (1)
- 05 - Dinamica - Esempio Di Oscillatore Semplice Smorzato e FDL PDFDocument15 pagini05 - Dinamica - Esempio Di Oscillatore Semplice Smorzato e FDL PDFrolohe15207Încă nu există evaluări
- 2013 53 UeDocument42 pagini2013 53 UeDamiano ZitoÎncă nu există evaluări
- Datasheet M60SH86-Txx PDFDocument2 paginiDatasheet M60SH86-Txx PDFDamiano ZitoÎncă nu există evaluări
- CMC Marine 062FM20 PDFDocument3 paginiCMC Marine 062FM20 PDFDamiano ZitoÎncă nu există evaluări
- L'Opera Di ParisDocument41 paginiL'Opera Di ParisDamiano ZitoÎncă nu există evaluări
- Obbligo Di ProgettoDocument24 paginiObbligo Di ProgettoDamiano ZitoÎncă nu există evaluări
- Stepper Motor How It WorksDocument8 paginiStepper Motor How It WorksDamiano ZitoÎncă nu există evaluări
- Cassette Quadri Di AutomazioneDocument6 paginiCassette Quadri Di AutomazioneDamiano ZitoÎncă nu există evaluări
- Valutazione Economica Degli InvestimentiDocument3 paginiValutazione Economica Degli InvestimentiDamiano ZitoÎncă nu există evaluări
- Influencer Politici Secondo FinderDocument101 paginiInfluencer Politici Secondo FinderDamiano ZitoÎncă nu există evaluări
- Strumenti e Nuove Esigenze Per Il Ripristino Del Servizio Del Sistema Elettrico Dopo Black-OutDocument78 paginiStrumenti e Nuove Esigenze Per Il Ripristino Del Servizio Del Sistema Elettrico Dopo Black-OutDamiano ZitoÎncă nu există evaluări
- ABB - Generalità Sui Sistemi Navali e Sulle Installazioni Di BordoDocument52 paginiABB - Generalità Sui Sistemi Navali e Sulle Installazioni Di BordoDamiano ZitoÎncă nu există evaluări
- Azionamenti ElettriciDocument137 paginiAzionamenti ElettriciDamiano ZitoÎncă nu există evaluări
- Protezioni Delle Linee Elettriche AT e AATDocument8 paginiProtezioni Delle Linee Elettriche AT e AATDamiano ZitoÎncă nu există evaluări
- Proprietà dell'SF6Document10 paginiProprietà dell'SF6Damiano Zito100% (1)
- Tesar - Trasformatori Di Potenza (Power Transformers)Document16 paginiTesar - Trasformatori Di Potenza (Power Transformers)Damiano ZitoÎncă nu există evaluări
- ABB - DomusTechDocument122 paginiABB - DomusTechDamiano ZitoÎncă nu există evaluări
- Manual DigistarDocument104 paginiManual DigistarAntonio Marcos CarvalhoÎncă nu există evaluări
- Storia Della Letteratura ItalianaDocument70 paginiStoria Della Letteratura ItalianamarytaÎncă nu există evaluări
- Antonio Carraro Serie SM Tigre Tigrone Supertigre Tropical Tigrecar Unicar Unitrans Maki Parts CatalogueDocument268 paginiAntonio Carraro Serie SM Tigre Tigrone Supertigre Tropical Tigrecar Unicar Unitrans Maki Parts Cataloguefrancisco javier mora verdugo100% (1)
- 5 Segnalazioni AeroportualiDocument90 pagini5 Segnalazioni AeroportualiGaetano CirignottaÎncă nu există evaluări
- Parte StoricaDocument2 paginiParte StoricaArianna EsseÎncă nu există evaluări
- Stima Della Resistenza Del Calcestruzzo Mediante Prova Di EstrazioneDocument57 paginiStima Della Resistenza Del Calcestruzzo Mediante Prova Di EstrazioneDavide TrapaniÎncă nu există evaluări
- La Sfida Della CupolaDocument36 paginiLa Sfida Della CupolaGiulia CesareoÎncă nu există evaluări
- Laboratorio Di Tec - Musicali - IndiceDocument4 paginiLaboratorio Di Tec - Musicali - IndiceSarah Dorsey0% (1)