S-ar putea să vă placă și
- Chemical Reaction Engineering. LevenspielDocument15 paginiChemical Reaction Engineering. LevenspielcespinaÎncă nu există evaluări
- Matyka SimpleDocument13 paginiMatyka SimpleEtsu KooÎncă nu există evaluări
- SolvingtheincompressibleNavierStokesequations PDFDocument16 paginiSolvingtheincompressibleNavierStokesequations PDFTUBA YAQOOBÎncă nu există evaluări
- A Compact and Fast Matlab Code Solving The Incompressible Navier-Stokes Equations On Rectangular Domains Mit18086 Navierstokes.mDocument16 paginiA Compact and Fast Matlab Code Solving The Incompressible Navier-Stokes Equations On Rectangular Domains Mit18086 Navierstokes.mhlkatkÎncă nu există evaluări
- Parameterizing The Curve of The IntersectionDocument2 paginiParameterizing The Curve of The Intersectionlzyabc597Încă nu există evaluări
- Project Navier StokesDocument26 paginiProject Navier StokesYves GarnardÎncă nu există evaluări
- Matheiu Function DocumentationDocument23 paginiMatheiu Function DocumentationSabitabrata BanerjeeÎncă nu există evaluări
- 630 Rec Part2 Sol PDFDocument9 pagini630 Rec Part2 Sol PDFboggled429Încă nu există evaluări
- (83645067) Cristian EcuaDocument13 pagini(83645067) Cristian EcuaJohan Habid Orozco AraujoÎncă nu există evaluări
- Applied Mathematics and Computation: Yun Yan, Frederick Ira Moxley III, Weizhong DaiDocument19 paginiApplied Mathematics and Computation: Yun Yan, Frederick Ira Moxley III, Weizhong DailunejleÎncă nu există evaluări
- Chapter 5. Methods for Elliptic Equations: ρ ∂ + ⋅∇ = −∇ + + ∇ ∂ rrr r rDocument10 paginiChapter 5. Methods for Elliptic Equations: ρ ∂ + ⋅∇ = −∇ + + ∇ ∂ rrr r rteknikpembakaran2013Încă nu există evaluări
- MEC 236 - Computer Applications 3Document224 paginiMEC 236 - Computer Applications 3Wafaa AimanÎncă nu există evaluări
- Solving Poisson's Equation by Finite DifferencesDocument6 paginiSolving Poisson's Equation by Finite DifferencesEugene LiÎncă nu există evaluări
- Correction Equation of The SIMPLE Algorithm: Removal of Temporal and Under-Relaxation Terms From The PressureDocument18 paginiCorrection Equation of The SIMPLE Algorithm: Removal of Temporal and Under-Relaxation Terms From The PressurehlkatkÎncă nu există evaluări
- D 001 DownloadDocument14 paginiD 001 DownloadAnkit ShrivastavaÎncă nu există evaluări
- A Finite Volume Method For GNSQDocument19 paginiA Finite Volume Method For GNSQRajesh YernagulaÎncă nu există evaluări
- Numerical Simulation of Flow Around A Circular Cylinder at Moderate Reynolds NumbersDocument15 paginiNumerical Simulation of Flow Around A Circular Cylinder at Moderate Reynolds NumbersJohnnyÎncă nu există evaluări
- FEM For NTDocument19 paginiFEM For NTJapanPatelÎncă nu există evaluări
- Numerical Simulation For The Solution of Nonlinear Jaulent-Miodek Coupled Equations Using Quartic B-SplineDocument18 paginiNumerical Simulation For The Solution of Nonlinear Jaulent-Miodek Coupled Equations Using Quartic B-SplineWaleed AdelÎncă nu există evaluări
- Final ProjectDocument4 paginiFinal ProjectChacho BacoaÎncă nu există evaluări
- AME 301: Differential Equations, Vibrations and Controls: Notes On Finite-Difference Methods ForDocument19 paginiAME 301: Differential Equations, Vibrations and Controls: Notes On Finite-Difference Methods ForMukhlizar IsmailÎncă nu există evaluări
- The Functional Variable Method To Some Complex Nonlinear Evolution EquationsDocument5 paginiThe Functional Variable Method To Some Complex Nonlinear Evolution EquationsSEP-PublisherÎncă nu există evaluări
- Lecture 2: Continuation of EquilibriaDocument10 paginiLecture 2: Continuation of Equilibria周沛恩Încă nu există evaluări
- Couette Flow Analytical and Numerical SolutionDocument4 paginiCouette Flow Analytical and Numerical SolutionRasikh Tariq100% (1)
- A Finite Element Approach To Burgers' Equation: J. Caldwell and P. WanlessDocument5 paginiA Finite Element Approach To Burgers' Equation: J. Caldwell and P. WanlesschrissbansÎncă nu există evaluări
- Numerical Simulation of The Navier Stoke EquationDocument18 paginiNumerical Simulation of The Navier Stoke EquationLitan Kumar SahaÎncă nu există evaluări
- X X (U) y y (U) Z Z (U) (1) : Chapter 2 Curves, Str. 30-33Document3 paginiX X (U) y y (U) Z Z (U) (1) : Chapter 2 Curves, Str. 30-33Emir MandjukaÎncă nu există evaluări
- 32 5 Hypblc PdeDocument12 pagini32 5 Hypblc PdeEbookcrazeÎncă nu există evaluări
- SGN 2206 Lecture New 4Document25 paginiSGN 2206 Lecture New 4sitaram_1Încă nu există evaluări
- Assignment 5Document6 paginiAssignment 5Maths loveÎncă nu există evaluări
- Exact Solutions of Nonlinear (2 + 1) - Dimension Nonlinear Dispersive Long Wave and Coupled Boiti-Leon-Pempinelli Equations by Using The Modified Simple Equation MethodDocument7 paginiExact Solutions of Nonlinear (2 + 1) - Dimension Nonlinear Dispersive Long Wave and Coupled Boiti-Leon-Pempinelli Equations by Using The Modified Simple Equation MethodTI Journals PublishingÎncă nu există evaluări
- Haydl - 1971 - Analysis of Beam-Columns by Initial Parameter MethodDocument7 paginiHaydl - 1971 - Analysis of Beam-Columns by Initial Parameter MethodNguyen Tuan TrungÎncă nu există evaluări
- Chap 1Document20 paginiChap 1torinomgÎncă nu există evaluări
- CatenaryDocument8 paginiCatenaryMary MarasiganÎncă nu există evaluări
- Advanced Engineering MathematicsDocument21 paginiAdvanced Engineering MathematicsSilambarasan VeluchamyÎncă nu există evaluări
- New Explicit Solitary Wave Solutions For (2 Boussinesq Equation and (3Document7 paginiNew Explicit Solitary Wave Solutions For (2 Boussinesq Equation and (3amed leonesÎncă nu există evaluări
- Stabilizability of Two-Dimensional Navier-Stokes Equations With Help of A Boundary Feedback ControlDocument43 paginiStabilizability of Two-Dimensional Navier-Stokes Equations With Help of A Boundary Feedback ControlgetsweetÎncă nu există evaluări
- Exact Solutions For The Modified KDV and The Generalized KDV Equations Via Exp-Function MethodDocument21 paginiExact Solutions For The Modified KDV and The Generalized KDV Equations Via Exp-Function MethodAnonymous 9U8UN35CalÎncă nu există evaluări
- Convergence of A High-Order Compact Finite Difference Scheme For A Nonlinear Black-Scholes EquationDocument16 paginiConvergence of A High-Order Compact Finite Difference Scheme For A Nonlinear Black-Scholes EquationMSP ppnÎncă nu există evaluări
- Viscous Fluid FlowDocument48 paginiViscous Fluid FlowTrym Erik Nielsen100% (1)
- Experiment No. 3: Solution of Power Flow Problem Using GaussDocument6 paginiExperiment No. 3: Solution of Power Flow Problem Using GaussMuhammad SameerÎncă nu există evaluări
- Solutions For Homework 1 MA510: Vector Calculus: Yuliang Wang January 21, 2015Document5 paginiSolutions For Homework 1 MA510: Vector Calculus: Yuliang Wang January 21, 2015ffppxxzzÎncă nu există evaluări
- Hula HoopDocument10 paginiHula HoopThipok Ben Rak-amnouykitÎncă nu există evaluări
- M Ethode Des El Ements FinisDocument18 paginiM Ethode Des El Ements FinisAbdellahFreemanÎncă nu există evaluări
- v2 PDFDocument20 paginiv2 PDFHamid MojiryÎncă nu există evaluări
- Jeffrey M Wooldridge Solutions Manual and Supplementary Materials For Econometric Analysis of Cross Section and Panel Data 2003Document135 paginiJeffrey M Wooldridge Solutions Manual and Supplementary Materials For Econometric Analysis of Cross Section and Panel Data 2003vanyta020194% (17)
- Linear Algebra CH 1 and 2 NotesDocument25 paginiLinear Algebra CH 1 and 2 NoteskidarchuÎncă nu există evaluări
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsDe la EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsÎncă nu există evaluări
- Difference Equations in Normed Spaces: Stability and OscillationsDe la EverandDifference Equations in Normed Spaces: Stability and OscillationsÎncă nu există evaluări
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesDe la EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- Tables of Weber Functions: Mathematical Tables, Vol. 1De la EverandTables of Weber Functions: Mathematical Tables, Vol. 1Încă nu există evaluări
- Constructed Layered Systems: Measurements and AnalysisDe la EverandConstructed Layered Systems: Measurements and AnalysisÎncă nu există evaluări
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)De la EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)Încă nu există evaluări
- Elementary Differential Equations with Linear AlgebraDe la EverandElementary Differential Equations with Linear AlgebraÎncă nu există evaluări
- Real Analysis and Probability: Solutions to ProblemsDe la EverandReal Analysis and Probability: Solutions to ProblemsÎncă nu există evaluări
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27De la EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Încă nu există evaluări
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)De la EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Încă nu există evaluări
- Ch3 Work and EnergyDocument25 paginiCh3 Work and EnergyahmadskhanÎncă nu există evaluări
- CH 3 3502Document9 paginiCH 3 3502ahmadskhanÎncă nu există evaluări
- Center of Mass3Document2 paginiCenter of Mass3ahmadskhanÎncă nu există evaluări
- Career Fair Prep GuideDocument18 paginiCareer Fair Prep GuideahmadskhanÎncă nu există evaluări
- Campus Parking Map 2014 0Document1 paginăCampus Parking Map 2014 0ahmadskhanÎncă nu există evaluări
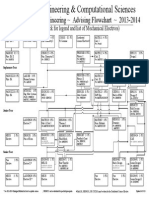
- B.S. Mechanical Engineering Advising Flowchart 2013-2014Document2 paginiB.S. Mechanical Engineering Advising Flowchart 2013-2014ahmadskhanÎncă nu există evaluări
- FAO Symposium OnDocument42 paginiFAO Symposium OnDhaval AcharyaÎncă nu există evaluări
- H S S X S S HDocument4 paginiH S S X S S HahmadskhanÎncă nu există evaluări
- Dynamics HW Cover SheetDocument1 paginăDynamics HW Cover SheetahmadskhanÎncă nu există evaluări
- Improvement in Commercial Scale Dry Mill Corn Ethanol Production Using Controlled Flow Cavitation and Cellulose HydrolysisDocument14 paginiImprovement in Commercial Scale Dry Mill Corn Ethanol Production Using Controlled Flow Cavitation and Cellulose HydrolysisahmadskhanÎncă nu există evaluări
- Chemical Composition and Nutritional Quality of Wheat Grain: Zuzana Šramková, Edita Gregová, Ernest ŠturdíkDocument24 paginiChemical Composition and Nutritional Quality of Wheat Grain: Zuzana Šramková, Edita Gregová, Ernest Šturdíkdsandos2001Încă nu există evaluări
- Aerodynamics Pressure CoefficientsDocument3 paginiAerodynamics Pressure CoefficientsPraketa SaxenaÎncă nu există evaluări
- 20130511233558467Document3 pagini20130511233558467ahmadskhanÎncă nu există evaluări
- 5103 Syl Lab Us 2009Document3 pagini5103 Syl Lab Us 2009ahmadskhanÎncă nu există evaluări
- Uncertainty ExamplesDocument3 paginiUncertainty ExamplesahmadskhanÎncă nu există evaluări
- Growth Marketing Final PresentationDocument17 paginiGrowth Marketing Final PresentationAmna AhmedÎncă nu există evaluări
- Unit 2 - Internet EmailDocument56 paginiUnit 2 - Internet EmailNkoshiEpaphrasShoopalaÎncă nu există evaluări
- Atm Error CodesDocument4 paginiAtm Error CodesamarÎncă nu există evaluări
- DELEM Install GBDocument81 paginiDELEM Install GBSylwester C.Încă nu există evaluări
- AmicoDocument2 paginiAmicoivukÎncă nu există evaluări
- Google Earth Scavenger HuntDocument5 paginiGoogle Earth Scavenger HuntBreanne DulaÎncă nu există evaluări
- Advanced High-Capacity Synchronization Solution: Your BenefitsDocument6 paginiAdvanced High-Capacity Synchronization Solution: Your BenefitsTuan MAÎncă nu există evaluări
- History of Power IsoDocument5 paginiHistory of Power IsoFahad Bin ImtiazÎncă nu există evaluări
- Steps To Replace Spare Parts of KX5600Document5 paginiSteps To Replace Spare Parts of KX5600Freire Jose FranciscoÎncă nu există evaluări
- Data SheetDocument23 paginiData Sheetmichaelliu123456Încă nu există evaluări
- Pass Leader DumpsDocument30 paginiPass Leader DumpsHyder BasetÎncă nu există evaluări
- Binding Source For DataGridView From Linq To SQL QueryDocument4 paginiBinding Source For DataGridView From Linq To SQL QueryPhuong LeÎncă nu există evaluări
- 5G Smart Port Whitepaper enDocument27 pagini5G Smart Port Whitepaper enWan Zulkifli Wan Idris100% (1)
- ControlMaestro 2010Document2 paginiControlMaestro 2010lettolimaÎncă nu există evaluări
- Amesim English s01Document20 paginiAmesim English s01Chetan P BhatÎncă nu există evaluări
- Service Manual DVD ZoranDocument40 paginiService Manual DVD Zoranvutruong175% (4)
- A Generation To End Genocide A Communications Strategy For Reaching MillennialsDocument64 paginiA Generation To End Genocide A Communications Strategy For Reaching MillennialsMadeleine KimbleÎncă nu există evaluări
- Dbms Unit 2 AssignmentDocument2 paginiDbms Unit 2 Assignmentshivansh srivastavaÎncă nu există evaluări
- Architectural Design Case Studies: Useful Online ResourcesDocument3 paginiArchitectural Design Case Studies: Useful Online Resourcesnysidlibrary100% (1)
- Two Scoops of Django 3.x by Daniel Audrey Feldroy (251-400)Document150 paginiTwo Scoops of Django 3.x by Daniel Audrey Feldroy (251-400)Prusa SeoÎncă nu există evaluări
- Stack Overview: Stack ADT Basic Operations of Stack Implementations of Stacks UsingDocument29 paginiStack Overview: Stack ADT Basic Operations of Stack Implementations of Stacks UsingFarooq ShadÎncă nu există evaluări
- Design Systems Formatted PDFDocument66 paginiDesign Systems Formatted PDFOleksiy OsiychukÎncă nu există evaluări
- 2006 - Pew Future of The Internet 2Document9 pagini2006 - Pew Future of The Internet 2_sdpÎncă nu există evaluări
- COMM 614 Ethical Issues in CommunicationsDocument10 paginiCOMM 614 Ethical Issues in CommunicationsLiz Horgan100% (1)
- How To Use Epals To Find A Collaborative Partner ClassroomDocument90 paginiHow To Use Epals To Find A Collaborative Partner ClassroomRita OatesÎncă nu există evaluări
- Sub QueriesDocument16 paginiSub QueriesakshayÎncă nu există evaluări
- HRS Funding Opportunities BulletinSeptember222017Document24 paginiHRS Funding Opportunities BulletinSeptember222017SyedÎncă nu există evaluări
- Romana T-3805-EDocument19 paginiRomana T-3805-EjorgeÎncă nu există evaluări
- General: Transport Format, Transport Format Combination (Set) TS 25.302Document5 paginiGeneral: Transport Format, Transport Format Combination (Set) TS 25.302Sowmya JayanandaÎncă nu există evaluări
- Project 1914198Document30 paginiProject 1914198abhishek malhotraÎncă nu există evaluări