S-ar putea să vă placă și
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2De la EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Încă nu există evaluări
- Les Nombres PremiersDocument12 paginiLes Nombres PremiersKarl MalongaÎncă nu există evaluări
- Exercices d'intégrales de lignes, de surfaces et de volumesDe la EverandExercices d'intégrales de lignes, de surfaces et de volumesÎncă nu există evaluări
- Mécanique Du Solide-1 PDFDocument58 paginiMécanique Du Solide-1 PDFArsène KekpenaÎncă nu există evaluări
- Correction de La Série N°3 de MPM - 2020-2021Document9 paginiCorrection de La Série N°3 de MPM - 2020-2021MounirÎncă nu există evaluări
- Cours de PPMDocument148 paginiCours de PPMKevin Tshimanga100% (2)
- 94 Justesse Fidélité PDFDocument66 pagini94 Justesse Fidélité PDFAhmed HamadaÎncă nu există evaluări
- Resolution Par Methode Norton Millman Kennely 14Document7 paginiResolution Par Methode Norton Millman Kennely 14chabane_148549100% (1)
- POLY LA3T2 Mecanique MateriauxDocument165 paginiPOLY LA3T2 Mecanique MateriauxmicipsaÎncă nu există evaluări
- Exercices Corriges Sur Les Equations DifferentiellesDocument3 paginiExercices Corriges Sur Les Equations DifferentiellesOussama Zn100% (2)
- Exercices Corrigés de L'optique GéométriqueDocument23 paginiExercices Corrigés de L'optique GéométriqueETUSUP92% (12)
- Cours D'analyse de Structures Par La Methode Des Elements FinisDocument58 paginiCours D'analyse de Structures Par La Methode Des Elements FinisJosué Fangu100% (1)
- TD - 3optique OptiqueDocument2 paginiTD - 3optique OptiqueKhalid Zeg100% (1)
- TD1-Enoncé - Stat - S5 20-21Document2 paginiTD1-Enoncé - Stat - S5 20-21Mohamed FoudalÎncă nu există evaluări
- Examens Optique S2 My EnsamDocument19 paginiExamens Optique S2 My EnsamNourhane BDÎncă nu există evaluări
- Pouvoir Pensee - Annie BesantDocument84 paginiPouvoir Pensee - Annie BesantA100% (1)
- Propagation D'ondes Exo CorrDocument13 paginiPropagation D'ondes Exo CorrDja Dja100% (1)
- Solution TD 1 MADocument7 paginiSolution TD 1 MAAmi NeÎncă nu există evaluări
- Theoreme Moment CinetiqueDocument7 paginiTheoreme Moment Cinetiquedido_fzÎncă nu există evaluări
- Examen 2012 CorrigeDocument3 paginiExamen 2012 CorrigeIssam Mob0% (1)
- Série 3aDocument3 paginiSérie 3aOmar SeddasÎncă nu există evaluări
- SERIE 4 Changement RéférentielDocument3 paginiSERIE 4 Changement RéférentielOussama parkour. Red100% (1)
- Corrigé Interrogation2aPhys3 PDFDocument1 paginăCorrigé Interrogation2aPhys3 PDFkahouadjiÎncă nu există evaluări
- Serie2 CorrectionDocument8 paginiSerie2 CorrectionNayoÎncă nu există evaluări
- TD1 2014Document4 paginiTD1 2014Anas HasniÎncă nu există evaluări
- Exercices Sur Les Milieux DielectriquesDocument5 paginiExercices Sur Les Milieux DielectriquesSahsah Abdeslam100% (1)
- TD 2 Torseurs PDFDocument2 paginiTD 2 Torseurs PDFYoussef DahaniÎncă nu există evaluări
- ExercicesDocument3 paginiExercicesheyasmineÎncă nu există evaluări
- I2 ExercicesDocument3 paginiI2 ExercicesVictor B.100% (1)
- TD Em8Document2 paginiTD Em8abdorabih22Încă nu există evaluări
- EXERCICE 30.7-: Optique OndulatoireDocument2 paginiEXERCICE 30.7-: Optique Ondulatoirefrançois dupontÎncă nu există evaluări
- Resume Optique SMP s4 PDFDocument18 paginiResume Optique SMP s4 PDFazzamÎncă nu există evaluări
- Le Double Puits Quantique Asym Etrique: V (X) LG LD V0Document8 paginiLe Double Puits Quantique Asym Etrique: V (X) LG LD V0Ayoub RochdyÎncă nu există evaluări
- Rattrapage ST-sem3 - 2008-2009Document5 paginiRattrapage ST-sem3 - 2008-2009Rou MàissàÎncă nu există evaluări
- Corr Exam 2 Optique s2Document4 paginiCorr Exam 2 Optique s2Junior KoffiÎncă nu există evaluări
- TP5 Anneaux de NewtonDocument7 paginiTP5 Anneaux de NewtonbaheddinassimaÎncă nu există evaluări
- TP Ondes Et VibrationsDocument8 paginiTP Ondes Et VibrationsNo1 Ad3Încă nu există evaluări
- TD 1 MagDocument2 paginiTD 1 MagAbir BlÎncă nu există evaluări
- Examen FinalDocument1 paginăExamen FinalsidiÎncă nu există evaluări
- Cours RD RR Francais AnnabaDocument42 paginiCours RD RR Francais AnnabaDaoud El CaidÎncă nu există evaluări
- Exos Corrigé El JadidaDocument11 paginiExos Corrigé El JadidaYoussef Taoufiki0% (1)
- Cinétique Et Dynamique: Série N°2Document2 paginiCinétique Et Dynamique: Série N°2KaitoblackÎncă nu există evaluări
- Ecriture Du Torseur Cinematique PDFDocument15 paginiEcriture Du Torseur Cinematique PDFapi34Încă nu există evaluări
- Serie 3 SolutionDocument5 paginiSerie 3 SolutionKevin CapoÎncă nu există evaluări
- Complément TD N°2Document11 paginiComplément TD N°2AhmedMerbahÎncă nu există evaluări
- QCMDocument41 paginiQCMImAd67% (3)
- Formulaire Relatif Aus OpérateursDocument2 paginiFormulaire Relatif Aus OpérateursYahya ElamraniÎncă nu există evaluări
- TD Electricite3 P2013 Nafidi-SMP4Document16 paginiTD Electricite3 P2013 Nafidi-SMP4Samira KaÎncă nu există evaluări
- 12 Cours - Géométrie Des MassesDocument14 pagini12 Cours - Géométrie Des Massesatamed32100% (1)
- Pendule de Torsion Cours 1Document2 paginiPendule de Torsion Cours 1Hafsa HafsaÎncă nu există evaluări
- Poly6 TD MQ s5Document32 paginiPoly6 TD MQ s5BadrEddinÎncă nu există evaluări
- MVT Force Centrale - ExosDocument6 paginiMVT Force Centrale - Exosabderrahim najim100% (1)
- TD2 - Meca1 - Sigma - 2021 - CopieDocument3 paginiTD2 - Meca1 - Sigma - 2021 - Copieblandinette momoÎncă nu există evaluări
- MECARAT - TD 4 - Série 4Document2 paginiMECARAT - TD 4 - Série 4Saiid Riadh50% (2)
- TD2 2020 2021Document3 paginiTD2 2020 2021nouraÎncă nu există evaluări
- Examen de Remplacement 2016Document3 paginiExamen de Remplacement 2016ahmed ahmedÎncă nu există evaluări
- Corrigé Examen Blanc MQDocument7 paginiCorrigé Examen Blanc MQSaid Boustta0% (1)
- Géométrie Des MassesDocument13 paginiGéométrie Des MassesHi Quel Bou AzizÎncă nu există evaluări
- TP Mise en Évidence Et Propriétés de L'auto-InductionDocument5 paginiTP Mise en Évidence Et Propriétés de L'auto-Inductionferdaows laboudiÎncă nu există evaluări
- TD Electrostatique Série 2Document1 paginăTD Electrostatique Série 2Kamaria Abdoulkarim100% (1)
- Mecanique Quantique TDDocument8 paginiMecanique Quantique TDZakari YaeÎncă nu există evaluări
- Ravaux Irigés De: Exercice 1Document5 paginiRavaux Irigés De: Exercice 1Nejib Rahmouni100% (1)
- Recc81vision nc2b07Document5 paginiRecc81vision nc2b07dragokalÎncă nu există evaluări
- Electrostatique ElectrocinetiqueDocument95 paginiElectrostatique Electrocinetiqueabdelhakim100% (1)
- 4 - Problemes Corrigés D'electrotechniquelDocument10 pagini4 - Problemes Corrigés D'electrotechniquelblbmalekÎncă nu există evaluări
- FGGDocument24 paginiFGGAhmed HamadaÎncă nu există evaluări
- Partie MarketingDocument3 paginiPartie MarketingAhmed HamadaÎncă nu există evaluări
- Bepcg2018 PDFDocument1 paginăBepcg2018 PDFAhmed HamadaÎncă nu există evaluări
- Bepcg2013 PDFDocument1 paginăBepcg2013 PDFAhmed HamadaÎncă nu există evaluări
- PESAGEDocument2 paginiPESAGEAhmed HamadaÎncă nu există evaluări
- Symbolique Des CouleursDocument24 paginiSymbolique Des CouleursAhmed HamadaÎncă nu există evaluări
- Conseils Bac 1 ADocument1 paginăConseils Bac 1 AAhmed HamadaÎncă nu există evaluări
- Loiuniforme EXOSCORRIGESDocument8 paginiLoiuniforme EXOSCORRIGESAhmed HamadaÎncă nu există evaluări
- Couche Limite - AutosimilaritéDocument55 paginiCouche Limite - Autosimilaritéc1190222-1Încă nu există evaluări
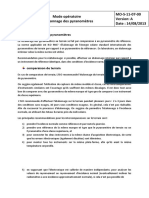
- Recalibrage Des PyranomètresDocument2 paginiRecalibrage Des PyranomètresAhmed HamadaÎncă nu există evaluări
- 2 ElectromécaniqueDocument6 pagini2 ElectromécaniqueJaksMaksÎncă nu există evaluări
- TH CLDocument30 paginiTH CLAhmed HamadaÎncă nu există evaluări
- Page de Garde FINALE AHMED PDFDocument1 paginăPage de Garde FINALE AHMED PDFAhmed HamadaÎncă nu există evaluări
- BAC Technique Tunisie 2015 Corrections de La Session Principale 1Document51 paginiBAC Technique Tunisie 2015 Corrections de La Session Principale 1Ahmed HamadaÎncă nu există evaluări
- Copie - Copie PDFDocument51 paginiCopie - Copie PDFAhmed HamadaÎncă nu există evaluări
- GGGJJDocument6 paginiGGGJJAhmed HamadaÎncă nu există evaluări
- 61 ThermomètresDocument7 pagini61 ThermomètresstumpmedÎncă nu există evaluări
- Copie - Copie PDFDocument51 paginiCopie - Copie PDFAhmed HamadaÎncă nu există evaluări
- 118 Desenfant Evaluation Aptitude Comparaisons InterlaboratoiresDocument4 pagini118 Desenfant Evaluation Aptitude Comparaisons InterlaboratoiresAhmed HamadaÎncă nu există evaluări
- Copie - Copie PDFDocument51 paginiCopie - Copie PDFAhmed HamadaÎncă nu există evaluări
- 83 Schema PDFDocument1 pagină83 Schema PDFAhmed HamadaÎncă nu există evaluări
- 2-1785 Portée D'accréditation Avenant 1 Du 14-06-2 - Copie - CopieDocument7 pagini2-1785 Portée D'accréditation Avenant 1 Du 14-06-2 - Copie - CopieAhmed HamadaÎncă nu există evaluări
- 6 GumDocument44 pagini6 GumFawzi RahmouniÎncă nu există evaluări
- 05 Burnel 70Document12 pagini05 Burnel 70Ahmed HamadaÎncă nu există evaluări
- Devoir 3 Question 1 Calcule de L'humiditeDocument6 paginiDevoir 3 Question 1 Calcule de L'humiditeAhmed HamadaÎncă nu există evaluări
- Devoir Q1 Et Devoir 2Document4 paginiDevoir Q1 Et Devoir 2Ahmed HamadaÎncă nu există evaluări
- Devoir 1 Caractérisation D'un BainDocument8 paginiDevoir 1 Caractérisation D'un BainAhmed HamadaÎncă nu există evaluări
- ProbatdDocument33 paginiProbatdensimagÎncă nu există evaluări
- Mémoire de Fin D'Études: Département de Génie Civil Et HydrauliqueDocument122 paginiMémoire de Fin D'Études: Département de Génie Civil Et HydrauliqueCabrel FankamÎncă nu există evaluări
- A5 Isolement Acoustique PDFDocument4 paginiA5 Isolement Acoustique PDFYounes OumaimounÎncă nu există evaluări
- Guide BBC EffilogisDocument11 paginiGuide BBC EffilogisFranche-Comté100% (2)
- Despre Suflare F BunDocument56 paginiDespre Suflare F BunChivuAlexandruÎncă nu există evaluări
- TP InterpolationDocument2 paginiTP InterpolationRéda BerradaÎncă nu există evaluări
- Cahier de Charges de Travaux de BetonnageDocument101 paginiCahier de Charges de Travaux de BetonnageMargaretÎncă nu există evaluări
- Serie D'exercices Corrigés - Math - Suites Réelles 1 - 4ème Math (2009-2010)Document4 paginiSerie D'exercices Corrigés - Math - Suites Réelles 1 - 4ème Math (2009-2010)GastØn El GassÎncă nu există evaluări
- 04 Composition Des Vitesses Et AccélérationsDocument8 pagini04 Composition Des Vitesses Et AccélérationsNitos IncoÎncă nu există evaluări
- Comparaison Des Normes Euro Code 8Document23 paginiComparaison Des Normes Euro Code 8Kara Mella50% (2)
- Cristallographie Géométrique SMC S4 2021Document30 paginiCristallographie Géométrique SMC S4 2021Said ElkhouÎncă nu există evaluări
- Transformation Ponctuelle Histogram MeDocument42 paginiTransformation Ponctuelle Histogram MeVhdl FpgaÎncă nu există evaluări
- (PDF) Exercices - Topologie Des Espaces Vectoriels Normés - Corrigé - Othmane Rais - AcademiaDocument9 pagini(PDF) Exercices - Topologie Des Espaces Vectoriels Normés - Corrigé - Othmane Rais - AcademiaNambinintsoa NomenjanaharyÎncă nu există evaluări
- PfesaidrachibiDocument99 paginiPfesaidrachibiSCORP LIOÎncă nu există evaluări
- Comportement Générique Des OndesDocument3 paginiComportement Générique Des Ondesla physique selon le programme FrançaisÎncă nu există evaluări
- ApplicationsDocument14 paginiApplicationsAyoub HmimssaÎncă nu există evaluări
- Validation PV ELITE 2014Document14 paginiValidation PV ELITE 2014Sebastien SchlesserÎncă nu există evaluări
- Écoulement Réactif en Milieu Poreux PDFDocument229 paginiÉcoulement Réactif en Milieu Poreux PDFait hssainÎncă nu există evaluări
- 2 m1 Me s2 Pcsc2 Structure MisDocument33 pagini2 m1 Me s2 Pcsc2 Structure Misrano bousselaouiÎncă nu există evaluări
- ELG2736 Chapitre 1 VariablesDocument184 paginiELG2736 Chapitre 1 VariablesGedeon KayaÎncă nu există evaluări
- Convertisseur BoostDocument9 paginiConvertisseur BoostNaas DjeddaouiÎncă nu există evaluări
- Daniel Alibert - Cours Et Exercices Corrigés - Volume 4Document140 paginiDaniel Alibert - Cours Et Exercices Corrigés - Volume 4walantaÎncă nu există evaluări
- Corrige Exos StatsDocument4 paginiCorrige Exos StatsOliver TwisteÎncă nu există evaluări