S-ar putea să vă placă și
- Angular-Velocity Control Approach ForDocument7 paginiAngular-Velocity Control Approach Forrkp17Încă nu există evaluări
- Agonist-Antagonist Active Knee Prosthesis - A Preliminary Study in Level-Ground WalkingDocument13 paginiAgonist-Antagonist Active Knee Prosthesis - A Preliminary Study in Level-Ground Walkingrkp17Încă nu există evaluări
- An Electromechanical Swing-Phase-ControlledDocument8 paginiAn Electromechanical Swing-Phase-Controlledrkp17Încă nu există evaluări
- Impacts of Microprocessor-Controlled Versus Non-microprocessor-Controlled Prosthetic Knee Joints Among Transfemoral AmputeesDocument9 paginiImpacts of Microprocessor-Controlled Versus Non-microprocessor-Controlled Prosthetic Knee Joints Among Transfemoral Amputeesrkp17Încă nu există evaluări
- Semiactive Virtual Control of A Hydraulic Prosthetic KneeDocument8 paginiSemiactive Virtual Control of A Hydraulic Prosthetic Kneerkp17Încă nu există evaluări
- Benefits of The Genium Microprocessor Controlled Prosthetic KneeDocument13 paginiBenefits of The Genium Microprocessor Controlled Prosthetic Kneerkp17Încă nu există evaluări
- Intelligent Knee Prostheses A Systematic Review of Control StrategiesDocument19 paginiIntelligent Knee Prostheses A Systematic Review of Control Strategiesrkp17Încă nu există evaluări
- Fluid Power & Tribology Section Refuelling Technology Division Bhabha Atomic Research Centre Trombay, Mumbai - 85Document28 paginiFluid Power & Tribology Section Refuelling Technology Division Bhabha Atomic Research Centre Trombay, Mumbai - 85rkp17Încă nu există evaluări
- Essential Oil Reed Diffuser RecipeDocument3 paginiEssential Oil Reed Diffuser Reciperkp17Încă nu există evaluări
- Moving-Load Dynamic Problems A Tutorial (With A Brief Overview)Document22 paginiMoving-Load Dynamic Problems A Tutorial (With A Brief Overview)rkp17Încă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- FBW Manual-Jan 2012-Revised and Corrected CS2Document68 paginiFBW Manual-Jan 2012-Revised and Corrected CS2Dinesh CandassamyÎncă nu există evaluări
- Modulation and Frequency Synthesis X Digital Wireless RadioDocument233 paginiModulation and Frequency Synthesis X Digital Wireless Radiolcnblzr3877Încă nu există evaluări
- Salem Telephone CompanyDocument4 paginiSalem Telephone Company202211021 imtnagÎncă nu există evaluări
- List of People in Playboy 1953Document57 paginiList of People in Playboy 1953Paulo Prado De Medeiros100% (1)
- Crawler Base DX500/DX600/DX680/ DX700/DX780/DX800: Original InstructionsDocument46 paginiCrawler Base DX500/DX600/DX680/ DX700/DX780/DX800: Original InstructionsdefiunikasungtiÎncă nu există evaluări
- Quantum Hopfield NetworksDocument83 paginiQuantum Hopfield NetworksSiddharth SharmaÎncă nu există evaluări
- Concrete For Water StructureDocument22 paginiConcrete For Water StructureIntan MadiaaÎncă nu există evaluări
- Sun Nuclear 3D SCANNERDocument7 paginiSun Nuclear 3D SCANNERFranco OrlandoÎncă nu există evaluări
- ABB Price Book 524Document1 paginăABB Price Book 524EliasÎncă nu există evaluări
- Paul Milgran - A Taxonomy of Mixed Reality Visual DisplaysDocument11 paginiPaul Milgran - A Taxonomy of Mixed Reality Visual DisplaysPresencaVirtual100% (1)
- PHP IntroductionDocument113 paginiPHP Introductionds0909@gmailÎncă nu există evaluări
- Vice President Enrollment Management in Oklahoma City OK Resume David CurranDocument2 paginiVice President Enrollment Management in Oklahoma City OK Resume David CurranDavidCurranÎncă nu există evaluări
- Digital Documentation Class 10 NotesDocument8 paginiDigital Documentation Class 10 NotesRuby Khatoon86% (7)
- Careem STRATEGIC MANAGEMENT FINAL TERM REPORTDocument40 paginiCareem STRATEGIC MANAGEMENT FINAL TERM REPORTFahim QaiserÎncă nu există evaluări
- Final Project Report GMS BtechDocument68 paginiFinal Project Report GMS Btech02Musaib Ul FayazÎncă nu există evaluări
- Rehabilitation and Retrofitting of Structurs Question PapersDocument4 paginiRehabilitation and Retrofitting of Structurs Question PapersYaswanthGorantlaÎncă nu există evaluări
- Pilot'S Operating Handbook: Robinson Helicopter CoDocument200 paginiPilot'S Operating Handbook: Robinson Helicopter CoJoseph BensonÎncă nu există evaluări
- KV Tripple Eccentric Butterfly Valve-LinDocument12 paginiKV Tripple Eccentric Butterfly Valve-LinWelma JohnsonÎncă nu există evaluări
- Automatic Stair Climbing Wheelchair: Professional Trends in Industrial and Systems Engineering (PTISE)Document7 paginiAutomatic Stair Climbing Wheelchair: Professional Trends in Industrial and Systems Engineering (PTISE)Abdelrahman MahmoudÎncă nu există evaluări
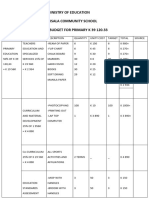
- Ministry of Education Musala SCHDocument5 paginiMinistry of Education Musala SCHlaonimosesÎncă nu există evaluări
- A Winning Formula: Debrief For The Asda Case (Chapter 14, Shaping Implementation Strategies) The Asda CaseDocument6 paginiA Winning Formula: Debrief For The Asda Case (Chapter 14, Shaping Implementation Strategies) The Asda CaseSpend ThriftÎncă nu există evaluări
- Tindara Addabbo, Edoardo Ales, Ylenia Curzi, Tommaso Fabbri, Olga Rymkevich, Iacopo Senatori - Performance Appraisal in Modern Employment Relations_ An Interdisciplinary Approach-Springer Internationa.pdfDocument278 paginiTindara Addabbo, Edoardo Ales, Ylenia Curzi, Tommaso Fabbri, Olga Rymkevich, Iacopo Senatori - Performance Appraisal in Modern Employment Relations_ An Interdisciplinary Approach-Springer Internationa.pdfMario ChristopherÎncă nu există evaluări
- UCAT SJT Cheat SheetDocument3 paginiUCAT SJT Cheat Sheetmatthewgao78Încă nu există evaluări
- Numerical Transformer Differential RelayDocument2 paginiNumerical Transformer Differential RelayTariq Mohammed OmarÎncă nu există evaluări
- Amazon Case StudyDocument22 paginiAmazon Case StudySaad Memon50% (6)
- Milestone 9 For WebsiteDocument17 paginiMilestone 9 For Websiteapi-238992918Încă nu există evaluări
- PPB 3193 Operation Management - Group 10Document11 paginiPPB 3193 Operation Management - Group 10树荫世界Încă nu există evaluări
- CBC Building Wiring Installation NC IIDocument72 paginiCBC Building Wiring Installation NC IIFaysbuk KotoÎncă nu există evaluări
- Gravity Based Foundations For Offshore Wind FarmsDocument121 paginiGravity Based Foundations For Offshore Wind FarmsBent1988Încă nu există evaluări
- Lec # 26 NustDocument18 paginiLec # 26 NustFor CheggÎncă nu există evaluări