S-ar putea să vă placă și
- Triaxial Test Systems enDocument10 paginiTriaxial Test Systems enDetjan JuniorÎncă nu există evaluări
- 50 Circuits With IC 555Document86 pagini50 Circuits With IC 555Anonymous 9VcxlFErfÎncă nu există evaluări
- ISO 9001:2015 Questions Answered: Suppliers CertificationDocument3 paginiISO 9001:2015 Questions Answered: Suppliers CertificationCentauri Business Group Inc.100% (1)
- Edsa PaladinDocument87 paginiEdsa PaladinIulian PârjoleanuÎncă nu există evaluări
- TransformerDocument115 paginiTransformerAnonymous 9VcxlFErfÎncă nu există evaluări
- 8J Summary SheetDocument2 pagini8J Summary Sheet박찬우Încă nu există evaluări
- Coastal DefenceDocument112 paginiCoastal DefenceMorvin BudhanÎncă nu există evaluări
- SYS600 - Programming Language SCIL PDFDocument394 paginiSYS600 - Programming Language SCIL PDFAnonymous 9VcxlFErfÎncă nu există evaluări
- A Guide To Digital Fault Recording Event AnalysisDocument17 paginiA Guide To Digital Fault Recording Event Analysismisener323100% (1)
- RTOS NewDocument83 paginiRTOS New110059Încă nu există evaluări
- Sys600 Opc ServerDocument52 paginiSys600 Opc ServerAnonymous 9VcxlFErfÎncă nu există evaluări
- SF6 Novec 4710Document4 paginiSF6 Novec 4710Fidya Eka PrahestiÎncă nu există evaluări
- Distance Relay Principle: Suppose Relay Is Designed To Operate WhenDocument40 paginiDistance Relay Principle: Suppose Relay Is Designed To Operate WhenAnonymous 9VcxlFErfÎncă nu există evaluări
- J.M. Hurst Cyclic AnalysisDocument45 paginiJ.M. Hurst Cyclic AnalysisChristian Robinson80% (10)
- Ism CodeDocument9 paginiIsm CodePraneel KurhadeÎncă nu există evaluări
- Implementation of Scada in Gas PipelineDocument14 paginiImplementation of Scada in Gas PipelinenwabukingzÎncă nu există evaluări
- 6484 FutureTime JP 20110131 WebDocument8 pagini6484 FutureTime JP 20110131 WebShawn GonzalesÎncă nu există evaluări
- Failsafe Architecture UFSBIDocument7 paginiFailsafe Architecture UFSBIAkhilesh YadavÎncă nu există evaluări
- Bose Control Sep 2003Document3 paginiBose Control Sep 2003LoveforYou OnlyÎncă nu există evaluări
- Homework Real TimeDocument9 paginiHomework Real Timeahmed.gammam1999Încă nu există evaluări
- Thesis Condition MonitoringDocument9 paginiThesis Condition Monitoringraquellivingstonakron100% (2)
- Do Utilities Still Need Stand Alone Disturbance Recorders?Document7 paginiDo Utilities Still Need Stand Alone Disturbance Recorders?Akhtar CoolÎncă nu există evaluări
- SAD Unit 4 Real Time Systems1Document20 paginiSAD Unit 4 Real Time Systems1onesnoneÎncă nu există evaluări
- RTOS - Real Time Operating SystemsDocument36 paginiRTOS - Real Time Operating Systemsrs0728Încă nu există evaluări
- Jumping Into Industry 4.0 With Predictive Maintenance SolutionsDocument26 paginiJumping Into Industry 4.0 With Predictive Maintenance SolutionsNantha Kumara PeriasamyÎncă nu există evaluări
- Power Monitoring Applications For Smart Network OperationsDocument13 paginiPower Monitoring Applications For Smart Network OperationsKhajaBurhanÎncă nu există evaluări
- Afcat GK Questions 2018Document52 paginiAfcat GK Questions 2018pappuÎncă nu există evaluări
- Real Time Operating SystemsDocument12 paginiReal Time Operating SystemsSubrahmanyam PadalaÎncă nu există evaluări
- Real-Time Systems: June 2012Document81 paginiReal-Time Systems: June 2012Kusuma P ChandrashekharÎncă nu există evaluări
- Electrical Engineering and Computer Science DepartmentDocument13 paginiElectrical Engineering and Computer Science Departmenteecs.northwestern.eduÎncă nu există evaluări
- Submersible Pumps DEBS 2015 PaperDocument7 paginiSubmersible Pumps DEBS 2015 PaperAnonymous yjLUF9gDTSÎncă nu există evaluări
- Louis RRLDocument3 paginiLouis RRLLouis Miguel AsisÎncă nu există evaluări
- CIGRE 2010: 21, Rue D'artois, F-75008 PARISDocument8 paginiCIGRE 2010: 21, Rue D'artois, F-75008 PARISkponramÎncă nu există evaluări
- Tut 3938Document4 paginiTut 3938vinod kapateÎncă nu există evaluări
- Elk 2111 123Document17 paginiElk 2111 123SAHBI MARROUCHIÎncă nu există evaluări
- Ultrasonic Navigation For Blind With Audio Interface DocumentationDocument55 paginiUltrasonic Navigation For Blind With Audio Interface DocumentationGoutham Raj Mode60% (5)
- Documents - Tips Ultrasonic Navigation For Blind With Audio Interface DocumentationDocument83 paginiDocuments - Tips Ultrasonic Navigation For Blind With Audio Interface DocumentationVishal ChristopherÎncă nu există evaluări
- TemplateDocument14 paginiTemplateEdwardÎncă nu există evaluări
- Freris Et Al. - 2011 - Fundamental Limits On Synchronizing Clocks Over Networks Allelopathic Effect of Cleavers (Galium Aparine) On GermDocument14 paginiFreris Et Al. - 2011 - Fundamental Limits On Synchronizing Clocks Over Networks Allelopathic Effect of Cleavers (Galium Aparine) On Germ张奔Încă nu există evaluări
- Luis A. Montestruque, P. J. Antsaklis 2002 MODEL-BASED NETWORKED CONTROL SYSTEMS StabilityDocument58 paginiLuis A. Montestruque, P. J. Antsaklis 2002 MODEL-BASED NETWORKED CONTROL SYSTEMS StabilityFelix GamarraÎncă nu există evaluări
- 1.4 Characteristics of Real-Time Systems: Section 1.7Document3 pagini1.4 Characteristics of Real-Time Systems: Section 1.7inderbeerÎncă nu există evaluări
- Anomaly Detection Time Series Final PDFDocument12 paginiAnomaly Detection Time Series Final PDFgong688665Încă nu există evaluări
- Ieee 1588Document5 paginiIeee 1588raghavendran raghuÎncă nu există evaluări
- Ca CH-1Document8 paginiCa CH-1Mulugeta AlewaÎncă nu există evaluări
- AFAS ProposalDocument10 paginiAFAS ProposalEyasu YemataÎncă nu există evaluări
- Classification of Real-Time SystemsDocument31 paginiClassification of Real-Time SystemsquÎncă nu există evaluări
- RealTime EthernetDocument20 paginiRealTime Ethernetgsvijay57Încă nu există evaluări
- Real Time System AssignmentDocument24 paginiReal Time System AssignmentChandia PandaÎncă nu există evaluări
- Timeweaver: A Tool For Hybrid Worst-Case Execution Time AnalysisDocument11 paginiTimeweaver: A Tool For Hybrid Worst-Case Execution Time AnalysisNico PopÎncă nu există evaluări
- 98 e Aci 136Document7 pagini98 e Aci 136Mohamad AlimadadiÎncă nu există evaluări
- A Simple Event-Based PID Controller: Årzén, Karl-ErikDocument7 paginiA Simple Event-Based PID Controller: Årzén, Karl-ErikedroalÎncă nu există evaluări
- Computer Notes - Real-Time Operating Systems and Micro KernelsDocument15 paginiComputer Notes - Real-Time Operating Systems and Micro KernelsecomputernotesÎncă nu există evaluări
- An On-Time Power-Aware Scheduling Scheme For Medical Sensor SoC-Based WBAN Systems - Sensors-13-00375-V2Document9 paginiAn On-Time Power-Aware Scheduling Scheme For Medical Sensor SoC-Based WBAN Systems - Sensors-13-00375-V2Generation GenerationÎncă nu există evaluări
- Chapter-1: Real-Time Scheduling With Security Enhancement For Packet Switched NetworksDocument65 paginiChapter-1: Real-Time Scheduling With Security Enhancement For Packet Switched NetworksIsmail TaralÎncă nu există evaluări
- Psoc Notes PDFDocument61 paginiPsoc Notes PDFanon_613151744100% (1)
- Annual Reviews in Control: Dominique Sauter, Mohamed Amine Sid, Samir Aberkane, Didier MaquinDocument12 paginiAnnual Reviews in Control: Dominique Sauter, Mohamed Amine Sid, Samir Aberkane, Didier MaquinsidamineÎncă nu există evaluări
- Smart DevicesDocument16 paginiSmart DevicesmanojchandrasekharanÎncă nu există evaluări
- Lect 3 PDFDocument16 paginiLect 3 PDFFikaduÎncă nu există evaluări
- Fault Tolerance in Wireless Sensor NetworksDocument8 paginiFault Tolerance in Wireless Sensor Networksdgk84_idÎncă nu există evaluări
- Time SynchronisationDocument36 paginiTime SynchronisationChilamkurti Siva Sankara RaoÎncă nu există evaluări
- Real Time Operating Systems: F.M. ConduratDocument4 paginiReal Time Operating Systems: F.M. ConduratFlorin ConduratÎncă nu există evaluări
- Data LoggerDocument5 paginiData LoggerBudhrani ViCkyÎncă nu există evaluări
- Neural Wireless Sensor Networks: Frank Oldewurtel and Petri M Ah OnenDocument8 paginiNeural Wireless Sensor Networks: Frank Oldewurtel and Petri M Ah Onenmeet123chanaÎncă nu există evaluări
- Sysnchronization Between Distributed System SpringerDocument8 paginiSysnchronization Between Distributed System Springertimeop273Încă nu există evaluări
- Literature ReviewDocument6 paginiLiterature Reviewlalith vamsiÎncă nu există evaluări
- R - T S A W S N: EAL IME Cheduling Lgorithms For Ireless Ensor EtworkDocument8 paginiR - T S A W S N: EAL IME Cheduling Lgorithms For Ireless Ensor EtworkMir Aftab AliÎncă nu există evaluări
- Design and Implementation of Low Power WSNDocument5 paginiDesign and Implementation of Low Power WSNAdil MubashirÎncă nu există evaluări
- Ijcet: International Journal of Computer Engineering & Technology (Ijcet)Document9 paginiIjcet: International Journal of Computer Engineering & Technology (Ijcet)IAEME PublicationÎncă nu există evaluări
- PHD Research ProposalDocument9 paginiPHD Research ProposalAbdessamed BenlahbibÎncă nu există evaluări
- Khamis 2013Document8 paginiKhamis 2013Tung MaiÎncă nu există evaluări
- Reducing Outage Durations Through Improved Protection and Autorestoration in Distribution Substations. WG-K3 MembersDocument23 paginiReducing Outage Durations Through Improved Protection and Autorestoration in Distribution Substations. WG-K3 Membersbkalatus1Încă nu există evaluări
- Overcurrent Relay Advances for Modern Electricity NetworksDe la EverandOvercurrent Relay Advances for Modern Electricity NetworksÎncă nu există evaluări
- Relay Test KitDocument33 paginiRelay Test KitAnonymous 9VcxlFErfÎncă nu există evaluări
- Ferrit Rod Antenna Bandfilter Pre-Amplifier Impedance Match Pre-Amplifier LC-filter Gain-Controlled Amplifier Detector & Filter Modulation DetectorDocument5 paginiFerrit Rod Antenna Bandfilter Pre-Amplifier Impedance Match Pre-Amplifier LC-filter Gain-Controlled Amplifier Detector & Filter Modulation DetectorAnonymous 9VcxlFErfÎncă nu există evaluări
- Line Differential Relay 7SD52Document17 paginiLine Differential Relay 7SD52Anonymous 9VcxlFErfÎncă nu există evaluări
- Fuseless Capacitor Bank Protection2Document7 paginiFuseless Capacitor Bank Protection2Anonymous 9VcxlFErfÎncă nu există evaluări
- F - 4008 Rbi Oocyte Somatic Cell Interactions and Ovulation Rate Effects On OocyteDocument8 paginiF - 4008 Rbi Oocyte Somatic Cell Interactions and Ovulation Rate Effects On OocyteAnonymous 9VcxlFErfÎncă nu există evaluări
- (Elearnica - Ir) - On Site Dynamic Testing of The Power Swing Blocking Element in PDFDocument7 pagini(Elearnica - Ir) - On Site Dynamic Testing of The Power Swing Blocking Element in PDFAnonymous 9VcxlFErfÎncă nu există evaluări
- (Elearnica - Ir) - Ground Distance Relay Compensation Based On Fault Resistance CADocument6 pagini(Elearnica - Ir) - Ground Distance Relay Compensation Based On Fault Resistance CAAnonymous 9VcxlFErfÎncă nu există evaluări
- Opc PDFDocument20 paginiOpc PDFnirajÎncă nu există evaluări
- ENOVIA V6 Product PortfolioDocument32 paginiENOVIA V6 Product PortfolioARUN PATILÎncă nu există evaluări
- Tutorial - 05 - Excavation Settle 3DDocument13 paginiTutorial - 05 - Excavation Settle 3DAlejandro Camargo SanabriaÎncă nu există evaluări
- Parallel Port Programming (PART 1) With CDocument13 paginiParallel Port Programming (PART 1) With ChertzoliÎncă nu există evaluări
- 4 and 6 Pole MotorDocument6 pagini4 and 6 Pole Motorarajamani78100% (1)
- Bio-Sensors and Bio-Devices: Spring 2020Document22 paginiBio-Sensors and Bio-Devices: Spring 2020barristertoto99 chanÎncă nu există evaluări
- Component Modeling - HDocument5 paginiComponent Modeling - HVasu IyerÎncă nu există evaluări
- Psychrometric Chart - Us and Si UnitsDocument1 paginăPsychrometric Chart - Us and Si UnitsRaden_Rici_Abi_1914Încă nu există evaluări
- IRF350Document7 paginiIRF350sanniviÎncă nu există evaluări
- " " Reach: Ordering InformationDocument8 pagini" " Reach: Ordering InformationTrong TranÎncă nu există evaluări
- Manual PC Soundcard Scope 1.4.5Document17 paginiManual PC Soundcard Scope 1.4.5NatashaKillerÎncă nu există evaluări
- Section 05120 Structural Steel Part 1Document43 paginiSection 05120 Structural Steel Part 1jacksondcplÎncă nu există evaluări
- An 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Document4 paginiAn 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Aura Milena Martinez ChavarroÎncă nu există evaluări
- Lecure Two. ReactorsDocument56 paginiLecure Two. ReactorsSophia WambuiÎncă nu există evaluări
- PBLauncherDocument50 paginiPBLauncherborreveroÎncă nu există evaluări
- Dynamic Cone Penetrometers: In-Situ CBR in 10 Minutes With Dual-Mass DcpsDocument2 paginiDynamic Cone Penetrometers: In-Situ CBR in 10 Minutes With Dual-Mass Dcpsd'Hell CaesarÎncă nu există evaluări
- Pioneer XDP - 30R ManualDocument213 paginiPioneer XDP - 30R Manualmugurel_stanescuÎncă nu există evaluări
- MJ4502 High-Power PNP Silicon TransistorDocument4 paginiMJ4502 High-Power PNP Silicon Transistorjoao victorÎncă nu există evaluări
- Aeroshell Fluid 41 PdsDocument2 paginiAeroshell Fluid 41 Pdsja.moreno930Încă nu există evaluări
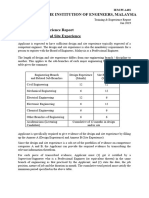
- IEM PI A401 - ANNEXE - Design & Site ExperienceDocument5 paginiIEM PI A401 - ANNEXE - Design & Site ExperienceapiplajengilaÎncă nu există evaluări
- 20 Site SummaryDocument2 pagini20 Site SummaryMuzammil WepukuluÎncă nu există evaluări
- Mech 3-Module 1Document41 paginiMech 3-Module 1melkisidick angloanÎncă nu există evaluări
- HARGA REFERENSI B2S PapuaDocument6 paginiHARGA REFERENSI B2S PapuaAbiyoga AdhityaÎncă nu există evaluări