S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- D6NDocument47 paginiD6NRodrigo Ricardo Véliz Meza100% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Software Architecture Document TemplateDocument13 paginiSoftware Architecture Document TemplateJaruhi ウェイ100% (2)
- Ecommerce WebsiteDocument14 paginiEcommerce WebsiteVipin Kumar100% (1)
- A320 NEO Abbreviations LEAP-1ADocument5 paginiA320 NEO Abbreviations LEAP-1AwenjukwaxÎncă nu există evaluări
- Warehouse ProjectDocument21 paginiWarehouse Projectpakshaheen75% (4)
- Probation Period ReportDocument17 paginiProbation Period ReportMiranti Puspitasari0% (1)
- Deep Learning in ManufacturingDocument6 paginiDeep Learning in ManufacturingEditor IjasreÎncă nu există evaluări
- Instructions SC EX365 2021 2bDocument4 paginiInstructions SC EX365 2021 2bChandilÎncă nu există evaluări
- Sense Furnishings Beyond Touch - HDPO - 23-24 - 54Document2 paginiSense Furnishings Beyond Touch - HDPO - 23-24 - 54Shivam DadhichÎncă nu există evaluări
- Ethics in Software Engineering PDFDocument2 paginiEthics in Software Engineering PDFJessicaÎncă nu există evaluări
- An Unequal Split Dual Three-Phase PMSM With Extended Torque-Speed Characteristics For Automotive ApplicationDocument13 paginiAn Unequal Split Dual Three-Phase PMSM With Extended Torque-Speed Characteristics For Automotive ApplicationShovan DeyÎncă nu există evaluări
- Base CodeDocument118 paginiBase CodePatrick de Wit100% (1)
- P ID Diagram Basics Symbols 1Document12 paginiP ID Diagram Basics Symbols 1Aung Netflix100% (1)
- Li-B17E7 User ManualDocument1 paginăLi-B17E7 User ManualKatia KorndorferÎncă nu există evaluări
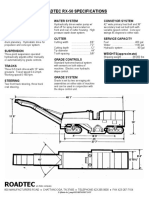
- RX 50 SpecDocument1 paginăRX 50 SpecFelipe HernándezÎncă nu există evaluări
- Manish SeminarDocument13 paginiManish SeminarIshu RajÎncă nu există evaluări
- ConfiguracionDocument32 paginiConfiguracionangelmauriciormzÎncă nu există evaluări
- Presentation On Core JavaDocument16 paginiPresentation On Core Javaprince himanshu0% (1)
- Daikin Magnitude Chiller - LeafletDocument8 paginiDaikin Magnitude Chiller - LeafletOmair FarooqÎncă nu există evaluări
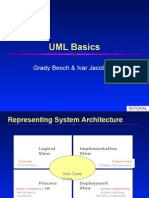
- UML Basics: Grady Booch & Ivar JacobsonDocument101 paginiUML Basics: Grady Booch & Ivar Jacobsongunasekaran.subramani3879100% (1)
- Chapter One: Introduction & Review of Principles of Object OrientationDocument50 paginiChapter One: Introduction & Review of Principles of Object OrientationhenokÎncă nu există evaluări
- Brochure South DL202Document2 paginiBrochure South DL202jimmyÎncă nu există evaluări
- SapDocument8 paginiSapviveksinghchdÎncă nu există evaluări
- Controlling Rail Potential of DC Supplied Rail Traction Systems PDFDocument10 paginiControlling Rail Potential of DC Supplied Rail Traction Systems PDFysperdanaÎncă nu există evaluări
- D75KXDocument28 paginiD75KXDiego Duran MolinaÎncă nu există evaluări
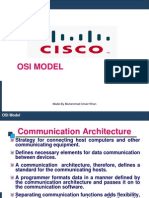
- OSI ModelDocument18 paginiOSI ModelruletriplexÎncă nu există evaluări
- Outokumpu Stainless Steel For Automotive IndustryDocument20 paginiOutokumpu Stainless Steel For Automotive IndustrychristopherÎncă nu există evaluări
- Application of JIT in Toyota in IndiaDocument2 paginiApplication of JIT in Toyota in IndiaAru BhartiÎncă nu există evaluări