S-ar putea să vă placă și
- Powerflex 70 Quick Start GuideDocument18 paginiPowerflex 70 Quick Start GuideMichael AlexanderÎncă nu există evaluări
- Idcgroupsliteraturedocumentsqs520 Qs001 en e PDFDocument38 paginiIdcgroupsliteraturedocumentsqs520 Qs001 en e PDFCody KeiferÎncă nu există evaluări
- 520-qs001 - En-E Configuracion Basica PDFDocument38 pagini520-qs001 - En-E Configuracion Basica PDFluis.chuquimiaÎncă nu există evaluări
- Powerflex 523Document36 paginiPowerflex 523Navish Kumar SinghÎncă nu există evaluări
- 22a Um001e en eDocument108 pagini22a Um001e en eNelson ContrerasÎncă nu există evaluări
- ACS550 User ManualDocument320 paginiACS550 User Manualsolutionbriigh1Încă nu există evaluări
- Power FlexDocument36 paginiPower FlexamiguitoÎncă nu există evaluări
- Kbic ManualDocument28 paginiKbic ManualArturo TerrazasÎncă nu există evaluări
- En Acs550 01 Um H A4-1Document326 paginiEn Acs550 01 Um H A4-1Thanh HaiÎncă nu există evaluări
- VFD AbbDocument326 paginiVFD AbbHilmer Irving Marcha HuancaÎncă nu există evaluări
- 520 qs001 - en eDocument36 pagini520 qs001 - en errebollarÎncă nu există evaluări
- Canon Imagerunner Advance Ir c5051 Ir c5045 Ir c5035 Ir c5030 Service Manual DownloadDocument22 paginiCanon Imagerunner Advance Ir c5051 Ir c5045 Ir c5035 Ir c5030 Service Manual Downloadbellobeva100% (1)
- Yaskawa Varispeed f7 Manual PDFDocument246 paginiYaskawa Varispeed f7 Manual PDFjose garciaÎncă nu există evaluări
- Parker SSD Drives 650 Series Quick Start GuideDocument2 paginiParker SSD Drives 650 Series Quick Start Guideeng_karamazabÎncă nu există evaluări
- F7 Drive User Manual: Model: CIMR-F7U Document Number: TM.F7.01Document255 paginiF7 Drive User Manual: Model: CIMR-F7U Document Number: TM.F7.01negrinÎncă nu există evaluări
- 3aua00000145616 RevbDocument316 pagini3aua00000145616 Revbtamtour7Încă nu există evaluări
- ABB ACS800 11 Regenerative InverterDocument146 paginiABB ACS800 11 Regenerative InverterGabo RamirezÎncă nu există evaluări
- Quick Start PF70Document18 paginiQuick Start PF70selvan_rsk761Încă nu există evaluări
- 22c Qs001 - en P Power Flex 400Document28 pagini22c Qs001 - en P Power Flex 400dicicaÎncă nu există evaluări
- Bulletin 1333 3/4-20 HP (.55-15 KW) Adjustable Frequency AC DriveDocument138 paginiBulletin 1333 3/4-20 HP (.55-15 KW) Adjustable Frequency AC Driveuser1Încă nu există evaluări
- F7 Drive User Manual: Model: CIMR-F7U Document Number: TM.F7.01Document254 paginiF7 Drive User Manual: Model: CIMR-F7U Document Number: TM.F7.01Andrea VarasÎncă nu există evaluări
- Adjustable Frequency AC Drive: FRN 1.xxDocument114 paginiAdjustable Frequency AC Drive: FRN 1.xxslavaphilÎncă nu există evaluări
- Allen Bradley Pf4m User ManualDocument116 paginiAllen Bradley Pf4m User ManualEmrah ünalÎncă nu există evaluări
- Drive Guard Safe-Off Option For PowerFlex 40P-70 AC DrivesDocument144 paginiDrive Guard Safe-Off Option For PowerFlex 40P-70 AC DrivesGanesh DeyÎncă nu există evaluări
- DCS800ServiceManual RevADocument96 paginiDCS800ServiceManual RevAElinplastÎncă nu există evaluări
- Manual Variador Allen Bradley 161Document50 paginiManual Variador Allen Bradley 161Cosmin BlagaÎncă nu există evaluări
- Hardware Manual ACS800-04 Drive Modules (0.55 To 200 KW) ACS800-U4 Drive Modules (0.75 To 200 HP)Document164 paginiHardware Manual ACS800-04 Drive Modules (0.55 To 200 KW) ACS800-U4 Drive Modules (0.75 To 200 HP)andreiandrei573Încă nu există evaluări
- F7 Prog IngDocument202 paginiF7 Prog IngpiabÎncă nu există evaluări
- Manual 4MDocument118 paginiManual 4MJoão Manoel Bruna GarciaÎncă nu există evaluări
- FX3S InstallationManual Hardware JY997D48301 ADocument4 paginiFX3S InstallationManual Hardware JY997D48301 AMárcio FernandesÎncă nu există evaluări
- VF1Document138 paginiVF1Tomás Andrés Madrid RosalesÎncă nu există evaluări
- ATV312 ProfibusDP CommsManualDocument37 paginiATV312 ProfibusDP CommsManualeirisarriÎncă nu există evaluări
- Armstrong IVS-102 High Power Operating Instructions MG.12.P1.02Document185 paginiArmstrong IVS-102 High Power Operating Instructions MG.12.P1.02sas999333Încă nu există evaluări
- Fan Uc Manuals 1793Document93 paginiFan Uc Manuals 1793Erik Hernandez100% (1)
- Hardware Manual ACS800-01 Drives (0.55 To 200 KW) ACS800-U1 Drives (0.75 To 200 HP)Document174 paginiHardware Manual ACS800-01 Drives (0.55 To 200 KW) ACS800-U1 Drives (0.75 To 200 HP)virgil guimanÎncă nu există evaluări
- 7000 At002 - en PDocument22 pagini7000 At002 - en PPrashant HirdekarÎncă nu există evaluări
- 94 79 IVS102 HighPower OperatingInstructions MG12P202Document182 pagini94 79 IVS102 HighPower OperatingInstructions MG12P202evilrich172772Încă nu există evaluări
- Power Flex 400Document218 paginiPower Flex 400Marco Souza100% (1)
- Invertek Drives Optidrive E2 ManualDocument29 paginiInvertek Drives Optidrive E2 Manualben_hamidÎncă nu există evaluări
- Drivecon XT Series Instruction ManualDocument120 paginiDrivecon XT Series Instruction ManualHochimidÎncă nu există evaluări
- Diagnostico SLC 500Document28 paginiDiagnostico SLC 500James Howlett HudsonÎncă nu există evaluări
- ABB DCS800 Drives Hardware Manual Rev EDocument128 paginiABB DCS800 Drives Hardware Manual Rev Ejvcoral321Încă nu există evaluări
- 1785 qs006 - en PDocument36 pagini1785 qs006 - en PVictor Hugo Alcocer CabraÎncă nu există evaluări
- 3ADW000193R0601 DCS800 Firmware Manual e FDocument466 pagini3ADW000193R0601 DCS800 Firmware Manual e Fdat_nguyen_2100% (1)
- 94 886 - IVS 102 - Operating - Instructions - MG 12 E2 02 PDFDocument164 pagini94 886 - IVS 102 - Operating - Instructions - MG 12 E2 02 PDFBianca L. FoliacoÎncă nu există evaluări
- Enhanced PLC-5 Programmable Controllers: Purpose of This DocumentDocument24 paginiEnhanced PLC-5 Programmable Controllers: Purpose of This Documenthunter73Încă nu există evaluări
- MANUAL For Inverter 3.5 KW LNCDocument78 paginiMANUAL For Inverter 3.5 KW LNCEduardo Gonzalez OleaÎncă nu există evaluări
- Power FlexDocument54 paginiPower FlexPatrick RodriguesÎncă nu există evaluări
- 530 Speed Controllers 1202 enDocument34 pagini530 Speed Controllers 1202 enfnrjbÎncă nu există evaluări
- Instructions For Cutler-Hammer LDB, LD, HLD, HLDB, LDC, LW, HLW, LWC, CLD, CHLD, CLDC Circuit Breakers and L-Frame Series C SwitchesDocument12 paginiInstructions For Cutler-Hammer LDB, LD, HLD, HLDB, LDC, LW, HLW, LWC, CLD, CHLD, CLDC Circuit Breakers and L-Frame Series C Switchespayolin77Încă nu există evaluări
- PowerFlex 7000 Medium Voltage AC DriveDocument350 paginiPowerFlex 7000 Medium Voltage AC Drivesalmo83:18Încă nu există evaluări
- Ws5 9eDocument48 paginiWs5 9ekrukinÎncă nu există evaluări
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusDe la EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusÎncă nu există evaluări
- Offshore Electrical Engineering ManualDe la EverandOffshore Electrical Engineering ManualEvaluare: 4 din 5 stele4/5 (9)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- AHaH Computing-From Metastable Switches To Attractors To Machine LearningDocument29 paginiAHaH Computing-From Metastable Switches To Attractors To Machine LearningCaelumBlimpÎncă nu există evaluări
- Conjugation TablesDocument1 paginăConjugation TablesCaelumBlimpÎncă nu există evaluări
- SQL CheatsheetDocument1 paginăSQL CheatsheetDana RotenbergÎncă nu există evaluări
- nRF24L01P Product Specification 1 0Document78 pagininRF24L01P Product Specification 1 0CaelumBlimpÎncă nu există evaluări
- A National Strategic NarrativeDocument15 paginiA National Strategic NarrativejfhuberÎncă nu există evaluări
- Cooling Water TreatmentDocument4 paginiCooling Water Treatmentbutchoy28Încă nu există evaluări
- 410e Repair ExampleDocument6 pagini410e Repair ExampleYurii Chinov71% (7)
- Electronic Patient Record Use During Ward Rounds: A Qualitative Study of Interaction Between Medical StaffDocument8 paginiElectronic Patient Record Use During Ward Rounds: A Qualitative Study of Interaction Between Medical StaffpsikubÎncă nu există evaluări
- Wind Load AnalysisDocument4 paginiWind Load AnalysisNiraj ShindeÎncă nu există evaluări
- Architectural Component Sheets for Lima 2019 Venue DesignDocument18 paginiArchitectural Component Sheets for Lima 2019 Venue DesignjgiraolewisÎncă nu există evaluări
- GDFGDFDocument12 paginiGDFGDFAissa FaikÎncă nu există evaluări
- Iso 13485 Medical Devices 2016 PDFDocument12 paginiIso 13485 Medical Devices 2016 PDFDito PriyambodoÎncă nu există evaluări
- OpenBoard AM335xDocument2 paginiOpenBoard AM335xvedanttaÎncă nu există evaluări
- Desalination Plant Feed Water ArrangementsDocument11 paginiDesalination Plant Feed Water ArrangementsSooraj Surendran SugathaÎncă nu există evaluări
- ANSI E1.50-1 2017 Entertainment Technology - Requirements For The Structural Support of Temporary LED, Video & Display SystemsDocument19 paginiANSI E1.50-1 2017 Entertainment Technology - Requirements For The Structural Support of Temporary LED, Video & Display SystemsGabriel neagaÎncă nu există evaluări
- 02 CNC Lab Manual NIT APDocument3 pagini02 CNC Lab Manual NIT APDevesh RehanÎncă nu există evaluări
- A1 - QA.L.01 List of Instrument & Test Equipments-NEW 01Document1.129 paginiA1 - QA.L.01 List of Instrument & Test Equipments-NEW 01JKP OperationÎncă nu există evaluări
- Combined Autoclave and Water Purification System Using Solar EnergyDocument3 paginiCombined Autoclave and Water Purification System Using Solar EnergyIJIRSTÎncă nu există evaluări
- Panduit Electrical CatalogDocument1.040 paginiPanduit Electrical CatalognumnummoÎncă nu există evaluări
- RICOH Streamline NX Guia de UsuarioDocument107 paginiRICOH Streamline NX Guia de UsuarioMaria Elena AvilaÎncă nu există evaluări
- FAGUS6 - Materials and Analysis ParametersDocument15 paginiFAGUS6 - Materials and Analysis ParametersRamon GutierrezÎncă nu există evaluări
- Operation and Maintenance Manual: COD.: MUM0129 REV. 01Document28 paginiOperation and Maintenance Manual: COD.: MUM0129 REV. 01Laura Camila ManriqueÎncă nu există evaluări
- Tone Totke Aur Upay Pitradosh UpayDocument156 paginiTone Totke Aur Upay Pitradosh Upayajay bhatnagarÎncă nu există evaluări
- The Essential Entrelec - Cat - enDocument76 paginiThe Essential Entrelec - Cat - engeekboxcaruaruÎncă nu există evaluări
- Introduction To Computing ReviewerDocument2 paginiIntroduction To Computing ReviewerKyle AbiogÎncă nu există evaluări
- Metco®73F-NS-1 (-2) 10-058 PDFDocument7 paginiMetco®73F-NS-1 (-2) 10-058 PDF張政雄Încă nu există evaluări
- John Deere Parts CatalogueDocument47 paginiJohn Deere Parts CatalogueAdam Ioan100% (2)
- FAMILY TIES Lesson 9 Writing 2Document2 paginiFAMILY TIES Lesson 9 Writing 2Atikah AmaranÎncă nu există evaluări
- Microsoft Dynamics ERP By: Nora Al-MadiDocument15 paginiMicrosoft Dynamics ERP By: Nora Al-Madivijay_sr2009Încă nu există evaluări
- 12V 8AH Deep Cycle Battery SpecsDocument2 pagini12V 8AH Deep Cycle Battery SpecsAdrianHomescuÎncă nu există evaluări
- Kinematics and Dynamics of Machines MECE 3270-Course OutlineDocument10 paginiKinematics and Dynamics of Machines MECE 3270-Course OutlineCody WaltonÎncă nu există evaluări
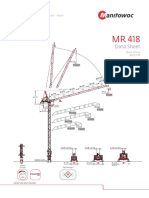
- MR418-FEM-Top Slewing Tower Cranes Imperial PDFDocument8 paginiMR418-FEM-Top Slewing Tower Cranes Imperial PDFCompass equipmentÎncă nu există evaluări
- Success and Failure Factors of BPRDocument29 paginiSuccess and Failure Factors of BPRMohammad Hamid MahmoodÎncă nu există evaluări
- Computer Awareness For IBPS - SBI - RRB PO & Clerks - Edu GeeksDocument3 paginiComputer Awareness For IBPS - SBI - RRB PO & Clerks - Edu GeeksVivek SharmaÎncă nu există evaluări
- Pronest 2019: Cad/Cam Nesting SoftwareDocument4 paginiPronest 2019: Cad/Cam Nesting SoftwareMani BMK GÎncă nu există evaluări