S-ar putea să vă placă și
- Módulo 6 Poka YokeDocument48 paginiMódulo 6 Poka YokemscarreraÎncă nu există evaluări
- Metodo JidokaDocument4 paginiMetodo Jidokajohn jairoÎncă nu există evaluări
- Mapeo de JidokaDocument3 paginiMapeo de JidokaRené Rdz ZúñigaÎncă nu există evaluări
- Jidoka y Justo a TiempoDocument5 paginiJidoka y Justo a TiempoYtalo MaldonadoÎncă nu există evaluări
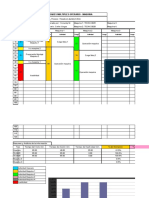
- Plantilla Diagrama Hombre - MaquinaDocument20 paginiPlantilla Diagrama Hombre - MaquinaJesus AlvaradoÎncă nu există evaluări
- JIDOKADocument3 paginiJIDOKArio007Încă nu există evaluări
- JIDOKADocument27 paginiJIDOKAValentina GomezÎncă nu există evaluări
- Programación GRAFCET puente grúa CP1ADocument3 paginiProgramación GRAFCET puente grúa CP1AJose Guadalupe ZavalaÎncă nu există evaluări
- Trabajo Semana 6 - Ingeniería de MétodosDocument8 paginiTrabajo Semana 6 - Ingeniería de MétodosJair Flores ChangÎncă nu există evaluări
- Diagrama Hombre-MaquinaDocument13 paginiDiagrama Hombre-MaquinaLeo ZunigaÎncă nu există evaluări
- Diagrama Hombre MaquinaDocument7 paginiDiagrama Hombre MaquinaAllanStevenÎncă nu există evaluări
- JIDOKADocument3 paginiJIDOKANelly BlackÎncă nu există evaluări
- Practica 3Document8 paginiPractica 3MARCO ANTONIO HERNANDEZ FUENTESÎncă nu există evaluări
- Instrucciones Aplicacion Machine TendingDocument6 paginiInstrucciones Aplicacion Machine TendingArkhraimÎncă nu există evaluări
- Expo CalidaddDocument2 paginiExpo CalidaddJessica TéllezÎncă nu există evaluări
- Jidoka - Manufactura ModernaDocument14 paginiJidoka - Manufactura ModernaJeffÎncă nu există evaluări
- Exposicion ManufacturaDocument3 paginiExposicion ManufacturaErnis GomezÎncă nu există evaluări
- Introducción Al Torno CNC Dyna 3300-B Del CIM.Document17 paginiIntroducción Al Torno CNC Dyna 3300-B Del CIM.Karen N. Fortanelly100% (1)
- Taller Diagrama Hombre MaquinaDocument1 paginăTaller Diagrama Hombre MaquinaNELSON CRUZÎncă nu există evaluări
- Programación de Un GRAFCETDocument12 paginiProgramación de Un GRAFCETJose Vicente Ruiz PeñaÎncă nu există evaluări
- Practica 1 FresadoraDocument5 paginiPractica 1 FresadoraSamantha CepedaÎncă nu există evaluări
- Informe Practica en Rectificadora Mi NeivaDocument9 paginiInforme Practica en Rectificadora Mi Neivajesus eduardo polaniaÎncă nu există evaluări
- JidokaDocument5 paginiJidokanorman arielÎncă nu există evaluări
- Automatas InformeDocument12 paginiAutomatas InformeWilber Pari ReyesÎncă nu există evaluări
- EJERCICIO PROPUESTO 5 Diagrama de Actividades MultiplesDocument10 paginiEJERCICIO PROPUESTO 5 Diagrama de Actividades MultiplesJohn R Paredes BautistaÎncă nu există evaluări
- Damon ExcelDocument8 paginiDamon ExcelSergio VillarteÎncă nu există evaluări
- Diagrama Hombre - MáquinaDocument23 paginiDiagrama Hombre - MáquinaLydia Cantillo Prada0% (1)
- Manual de Operaciones - Lab. 1Document20 paginiManual de Operaciones - Lab. 1jhonelÎncă nu există evaluări
- JIDOKADocument2 paginiJIDOKAjuan carlos vera peñaÎncă nu există evaluări
- Diagrama Hombre-Maquina ProblemasDocument2 paginiDiagrama Hombre-Maquina Problemasjohnny franklin torres ordinolaÎncă nu există evaluări
- Manual de ProgramacionDocument120 paginiManual de ProgramacionDanny Gomez100% (1)
- Torno CNCDocument56 paginiTorno CNCCARLOS ALFREDO FRANCIS CABRERAÎncă nu există evaluări
- Prt6 Automatismos - Uso de Guía Gemma LogoDocument4 paginiPrt6 Automatismos - Uso de Guía Gemma LogopaKoSTeÎncă nu există evaluări
- Manual ABBDocument30 paginiManual ABBOscar PolicarpoÎncă nu există evaluări
- Práctica 14. Máquina Mezcladora Con LogoDocument1 paginăPráctica 14. Máquina Mezcladora Con LogoRoberto Sanchez landeteÎncă nu există evaluări
- Apuntes C N CDocument43 paginiApuntes C N CJuan Gerardo Jalpa VillanuevaÎncă nu există evaluări
- Control de 3 motores secuencia FIFODocument21 paginiControl de 3 motores secuencia FIFORonald Cano CaladÎncă nu există evaluări
- Partes Centro de Maquinado CNC Dynamyte3300Document8 paginiPartes Centro de Maquinado CNC Dynamyte3300cesar eduardo0% (1)
- PRACTICASDocument19 paginiPRACTICASAntonio AlcalaÎncă nu există evaluări
- Tarea de EstudioDocument3 paginiTarea de EstudioCecilia GomezÎncă nu există evaluări
- Practica 1 FresadoraDocument6 paginiPractica 1 FresadoraPablo Cuauhtemoc Meza RodriguezÎncă nu există evaluări
- Ejercicio Estudio de Tiempos-3 (Reparado)Document2 paginiEjercicio Estudio de Tiempos-3 (Reparado)Maria PlazaÎncă nu există evaluări
- Partes Del Torno Dyna 3300Document5 paginiPartes Del Torno Dyna 3300Jess Jonguitud100% (1)
- Jidoka y AndonDocument10 paginiJidoka y AndonDavimendovares100% (1)
- Diagrama flujo trabajo operario máquinasDocument3 paginiDiagrama flujo trabajo operario máquinasAntonioÎncă nu există evaluări
- Actividad 6 Equipo 22Document6 paginiActividad 6 Equipo 22LuisArredondo100% (1)
- Actividad 1 Diagrama de FlujoDocument8 paginiActividad 1 Diagrama de Flujojesus herreraÎncă nu există evaluări
- Smed También en El Control NuméricoDocument3 paginiSmed También en El Control NuméricoEDMUNDO CERVANTESÎncă nu există evaluări
- Curso Básico Torno CNC Leadwell - Ingeniero David Rozo TorresDocument42 paginiCurso Básico Torno CNC Leadwell - Ingeniero David Rozo TorresRubén Chávez GonzálezÎncă nu există evaluări
- Gestión Hombre - MáquinaDocument5 paginiGestión Hombre - MáquinaJorge LuisÎncă nu există evaluări
- Guía rápida torno Doosan Fanuc 21/18iDocument35 paginiGuía rápida torno Doosan Fanuc 21/18iGianiMauricioQuinteroBautista100% (1)
- Taller Diagramas - Hombre - MáquinaDocument1 paginăTaller Diagramas - Hombre - MáquinaYulieth Natalia Acosta MorenoÎncă nu există evaluări
- Un Problema de SeguridadDocument2 paginiUn Problema de SeguridadGAEL JONAS ZOLOTOWÎncă nu există evaluări
- Ejercicios Diagrama Hombre Maquina 2017-3Document5 paginiEjercicios Diagrama Hombre Maquina 2017-3Gino Quincho MartinezÎncă nu există evaluări
- Programa en MicroWIN para Las Condiciones de La Banda TransportadoraDocument14 paginiPrograma en MicroWIN para Las Condiciones de La Banda TransportadoraDirce BaltazarÎncă nu există evaluări
- Cálculo de costes en procesos de mecanizado por arranque de viruta. fmeh0109De la EverandCálculo de costes en procesos de mecanizado por arranque de viruta. fmeh0109Încă nu există evaluări
- Diagnosis de averías y mantenimiento correctivo de sistemas de automatización industrial. ELEM0311De la EverandDiagnosis de averías y mantenimiento correctivo de sistemas de automatización industrial. ELEM0311Evaluare: 5 din 5 stele5/5 (1)
- Preparación y regulación de los sistemas de alimentación en máquinas de impresión offset. ARGI0109De la EverandPreparación y regulación de los sistemas de alimentación en máquinas de impresión offset. ARGI0109Încă nu există evaluări
- Mantenimiento de los dispositivos eléctricos de habitáculo y cofre motor. TMVG0209De la EverandMantenimiento de los dispositivos eléctricos de habitáculo y cofre motor. TMVG0209Evaluare: 5 din 5 stele5/5 (2)
- Preparación de máquinas de corte, ensamblado y acabado. TCPF0209De la EverandPreparación de máquinas de corte, ensamblado y acabado. TCPF0209Evaluare: 5 din 5 stele5/5 (1)
- VALORIANI. Hornos Profesionales. Vesuvio Serie IGLOO. Tecnología Al Servicio Del GustoDocument14 paginiVALORIANI. Hornos Profesionales. Vesuvio Serie IGLOO. Tecnología Al Servicio Del GustomscarreraÎncă nu există evaluări
- A - Digital Booklet - ESDocument13 paginiA - Digital Booklet - ESmscarreraÎncă nu există evaluări
- VALORIANI. Hornos Profesionales. Vesuvio Serie IGLOO. Tecnología Al Servicio Del GustoDocument14 paginiVALORIANI. Hornos Profesionales. Vesuvio Serie IGLOO. Tecnología Al Servicio Del GustomscarreraÎncă nu există evaluări
- Tarjeta SA3 2Document1 paginăTarjeta SA3 2mscarreraÎncă nu există evaluări
- Las Migraciones Italo Rioplatenses PDFDocument310 paginiLas Migraciones Italo Rioplatenses PDFSanja Mihajlovik-KostadinovskaÎncă nu există evaluări
- VALORIANI. Hornos Profesionales. Vesuvio Serie IGLOO. Tecnología Al Servicio Del GustoDocument14 paginiVALORIANI. Hornos Profesionales. Vesuvio Serie IGLOO. Tecnología Al Servicio Del GustomscarreraÎncă nu există evaluări
- Suelas FeboDocument74 paginiSuelas FebomscarreraÎncă nu există evaluări
- 2010.11 Abc PDFDocument1 pagină2010.11 Abc PDFmscarreraÎncă nu există evaluări
- Recibo - LinkedInDocument1 paginăRecibo - LinkedInmscarreraÎncă nu există evaluări
- FEDEXDocument9 paginiFEDEXmscarreraÎncă nu există evaluări
- Al Erg Enos 20122016Document1 paginăAl Erg Enos 20122016mscarreraÎncă nu există evaluări
- Tarjeta SA3Document1 paginăTarjeta SA3mscarreraÎncă nu există evaluări
- Malvinas 1982 UnlockedDocument158 paginiMalvinas 1982 UnlockedGuadalupe IglesiasÎncă nu există evaluări
- 2010.11 AbcDocument1 pagină2010.11 AbcmscarreraÎncă nu există evaluări
- Fagor 6H 185 AX OvenDocument1 paginăFagor 6H 185 AX OvenmscarreraÎncă nu există evaluări
- 2 El Territorio Del Equipo SlidesDocument1 pagină2 El Territorio Del Equipo SlidesmscarreraÎncă nu există evaluări
- Fagor 6H 185 AX Oven PDFDocument58 paginiFagor 6H 185 AX Oven PDFmscarreraÎncă nu există evaluări
- Tarjeta SA3 2Document1 paginăTarjeta SA3 2mscarreraÎncă nu există evaluări
- Red Tag PDFDocument1 paginăRed Tag PDFmscarreraÎncă nu există evaluări
- Oc Lomas ZamoraDocument60 paginiOc Lomas ZamoramscarreraÎncă nu există evaluări
- 3 La Documentación Visual PlantillasDocument1 pagină3 La Documentación Visual PlantillasmscarreraÎncă nu există evaluări
- Tarjeta 5S PDFDocument1 paginăTarjeta 5S PDFmscarreraÎncă nu există evaluări
- Frid 11 Jor NadasDocument28 paginiFrid 11 Jor NadasmscarreraÎncă nu există evaluări
- 3 La Documentación Visual Diagrama de FlechasDocument1 pagină3 La Documentación Visual Diagrama de FlechasmscarreraÎncă nu există evaluări
- Business Intelligence TPMDocument4 paginiBusiness Intelligence TPMmscarreraÎncă nu există evaluări
- Por Qué Es Importante La Contabilidad LeanDocument1 paginăPor Qué Es Importante La Contabilidad LeanmscarreraÎncă nu există evaluări
- PP 416Document13 paginiPP 416mscarreraÎncă nu există evaluări
- Telefónica 1261Document1 paginăTelefónica 1261mscarreraÎncă nu există evaluări
- Gráfico de Las Operaciones Estándar PDFDocument2 paginiGráfico de Las Operaciones Estándar PDFmscarreraÎncă nu există evaluări
- CL10. Valencia AlexanderDocument3 paginiCL10. Valencia AlexanderAlexander ValenciaÎncă nu există evaluări
- PID5624469 ExoesqueletoDocument7 paginiPID5624469 ExoesqueletoMarcelo Moya CajasÎncă nu există evaluări
- Como Equivocarse Menos en TerapiaDocument69 paginiComo Equivocarse Menos en TerapiaJavier GallosoÎncă nu există evaluări
- Catalogo Sunmed 2Document75 paginiCatalogo Sunmed 2Yanira RosasÎncă nu există evaluări
- TP 1 - Imagen Fotografica - 2022Document3 paginiTP 1 - Imagen Fotografica - 2022Mateo BarrenaÎncă nu există evaluări
- Evolución normas cableadoDocument7 paginiEvolución normas cableadon1caÎncă nu există evaluări
- Metadatos 1 TraducidoDocument21 paginiMetadatos 1 TraducidoOskr KrvajalÎncă nu există evaluări
- Ingeniería de Confiabilidad FinalDocument244 paginiIngeniería de Confiabilidad FinalJOHAN SEBASTIAN CUBILLOS HERNANDEZ100% (3)
- Lecturas Sistemas de Información Ene Entidades Digitales.Document87 paginiLecturas Sistemas de Información Ene Entidades Digitales.Piero MendozaÎncă nu există evaluări
- Amplificadores de Pequeña Señal FETDocument10 paginiAmplificadores de Pequeña Señal FETIsrael Ordoñez0% (1)
- 03 - Redes de ComputadorasDocument14 pagini03 - Redes de ComputadorasMixi SeguraÎncă nu există evaluări
- Planeador Preescolar Segundo PeriodoDocument6 paginiPlaneador Preescolar Segundo PeriodoLIKALELÎncă nu există evaluări
- Qué Es Una Plataforma LMSDocument9 paginiQué Es Una Plataforma LMSYQ SaenzÎncă nu există evaluări
- Metodologia de Incendios Por ChuviecoDocument9 paginiMetodologia de Incendios Por ChuviecoFrehiman CorzoÎncă nu există evaluări
- Ejercicios JavaDocument7 paginiEjercicios JavaMarisol Poma HuamanÎncă nu există evaluări
- Ejercicio #11 ColumnasDocument3 paginiEjercicio #11 ColumnasLuis SisÎncă nu există evaluări
- Seriacion Mapa Curricular LCC 2009 - A PDFDocument3 paginiSeriacion Mapa Curricular LCC 2009 - A PDFeduardogzzÎncă nu există evaluări
- Taller de Tecnología G4Document5 paginiTaller de Tecnología G4Carito Moreno GarcíaÎncă nu există evaluări
- Material de Reforzamiento U7Document2 paginiMaterial de Reforzamiento U7Rocío milagros Paucar contrerasÎncă nu există evaluări
- Análisis y Diseño Sísmico de Un Edificio Residencial en Sistema Aporticado Basados en La NSR-10 1511305229-1Document80 paginiAnálisis y Diseño Sísmico de Un Edificio Residencial en Sistema Aporticado Basados en La NSR-10 1511305229-1Neverjacinto Marquez RueneÎncă nu există evaluări
- Precauciones de seguridad TVDocument19 paginiPrecauciones de seguridad TVDiego DddÎncă nu există evaluări
- Programa Educando en Familia Isaac ChiribogaDocument3 paginiPrograma Educando en Familia Isaac ChiribogaNelly Rovalino TovarÎncă nu există evaluări
- Simulación de rectificador monofásico de onda completa con carga RLDocument3 paginiSimulación de rectificador monofásico de onda completa con carga RLFabian ValenciaÎncă nu există evaluări
- Derecho Informatico Material II - MaevDocument4 paginiDerecho Informatico Material II - MaevAlexis ArgüelloÎncă nu există evaluări
- Directorio IndustrialDocument24 paginiDirectorio IndustrialLuis Gustavo Tique De La CruzÎncă nu există evaluări
- Sistema de Pagos Tikrel Colombia SasDocument2 paginiSistema de Pagos Tikrel Colombia SasMAYERLINE CARDONA MARTINEZÎncă nu există evaluări
- Silabo MFIDocument3 paginiSilabo MFIJennifer Yates100% (1)
- Multivibradores Biestables (FLIP-FLOPSDocument3 paginiMultivibradores Biestables (FLIP-FLOPSLeobardo Genaro Roque NájeraÎncă nu există evaluări
- IAA - Informática aplicada a la administraciónDocument17 paginiIAA - Informática aplicada a la administraciónArturo Edition RomeroÎncă nu există evaluări
- Co 02Document3 paginiCo 02Fabián Alexander FreireÎncă nu există evaluări