S-ar putea să vă placă și
- High Performance Computing and the Discrete Element Model: Opportunity and ChallengeDe la EverandHigh Performance Computing and the Discrete Element Model: Opportunity and ChallengeÎncă nu există evaluări
- 05 GallegoDocument8 pagini05 GallegoHENRY ALEJANDRO MAYORGA ARIASÎncă nu există evaluări
- Profile Front MinimizationDocument12 paginiProfile Front MinimizationvttrlcÎncă nu există evaluări
- Fast Greedy Algorithms in Mapreduce and Streaming: Ax OverDocument10 paginiFast Greedy Algorithms in Mapreduce and Streaming: Ax OverPeter DavidÎncă nu există evaluări
- The Bandwidths of A Matrix. A Survey of AlgorithmsDocument41 paginiThe Bandwidths of A Matrix. A Survey of AlgorithmsmartrantÎncă nu există evaluări
- Formulating and Solving Routing Problems On Quantum ComputersDocument17 paginiFormulating and Solving Routing Problems On Quantum Computersmuhammed jamaal jallowÎncă nu există evaluări
- Solving Difficult Multicommodity Problems With A Specialized Interior-Point AlgorithmDocument14 paginiSolving Difficult Multicommodity Problems With A Specialized Interior-Point AlgorithmnarendraÎncă nu există evaluări
- Ganian 22 ADocument28 paginiGanian 22 AEdwardÎncă nu există evaluări
- Steepest Descent Algorithms For Optimization Under Unitary Matrix Constraint PDFDocument14 paginiSteepest Descent Algorithms For Optimization Under Unitary Matrix Constraint PDFAMISHI VIJAY VIJAYÎncă nu există evaluări
- Emerick-Reynolds2013 Article InvestigationOfTheSamplingPerfDocument26 paginiEmerick-Reynolds2013 Article InvestigationOfTheSamplingPerfAref 12345Încă nu există evaluări
- 2019 - A QUBO Model For The Traveling Salesman Problem With Time Windows - Papalitsas Et AlDocument21 pagini2019 - A QUBO Model For The Traveling Salesman Problem With Time Windows - Papalitsas Et AlKipper EyderoeÎncă nu există evaluări
- Improved Approximation Algorithms For Maximum Cut and Satisability Problems Using Semidenite ProgrammingDocument27 paginiImproved Approximation Algorithms For Maximum Cut and Satisability Problems Using Semidenite ProgrammingAnant ChhajwaniÎncă nu există evaluări
- Research Article: Degree-Constrained K-Minimum Spanning Tree ProblemDocument25 paginiResearch Article: Degree-Constrained K-Minimum Spanning Tree ProblemJack HamiltonÎncă nu există evaluări
- Generalized Cannon's Algorithm For Parallel Matrix MultiplicationDocument8 paginiGeneralized Cannon's Algorithm For Parallel Matrix MultiplicationkmaraliÎncă nu există evaluări
- Piecewise Linear Approximation of Generators Cost FunctionsDocument5 paginiPiecewise Linear Approximation of Generators Cost FunctionsCoji MazingerÎncă nu există evaluări
- 85432b45 - Polomski Baron Optimal Power FDocument15 pagini85432b45 - Polomski Baron Optimal Power FnegritilloomarÎncă nu există evaluări
- Measure and Conquer: A Simple O(20.288 n ) Independent Set AlgorithmDocument8 paginiMeasure and Conquer: A Simple O(20.288 n ) Independent Set AlgorithmMadeline CurryÎncă nu există evaluări
- Jeppesen Faster Multi-Object Segmentation Using Parallel Quadratic Pseudo-Boolean Optimization ICCV 2021 PaperDocument10 paginiJeppesen Faster Multi-Object Segmentation Using Parallel Quadratic Pseudo-Boolean Optimization ICCV 2021 PaperNan ZhangÎncă nu există evaluări
- Bhatia CCuantuMM Cycle-Consistent Quantum-Hybrid Matching of Multiple Shapes CVPR 2023 PaperDocument10 paginiBhatia CCuantuMM Cycle-Consistent Quantum-Hybrid Matching of Multiple Shapes CVPR 2023 PaperS Divakar BhatÎncă nu există evaluări
- Locally Linear Support Vector Machines: ( 1, 1) The Task Is To Estimate The Label yDocument8 paginiLocally Linear Support Vector Machines: ( 1, 1) The Task Is To Estimate The Label yEZ112Încă nu există evaluări
- 2019 Spectral and Energy Efficiency of Hybrid Precoding For MmWave Massive MIMO With Low-Resolution ADCs-DACsDocument9 pagini2019 Spectral and Energy Efficiency of Hybrid Precoding For MmWave Massive MIMO With Low-Resolution ADCs-DACssowÎncă nu există evaluări
- Parameterized Complexity of Geometric Problems: Panos Giannopoulos, Christian Knauer and Sue WhitesidesDocument14 paginiParameterized Complexity of Geometric Problems: Panos Giannopoulos, Christian Knauer and Sue WhitesidesarindamsinharayÎncă nu există evaluări
- 10.optimal Transmission p.71-76 17july2010Document6 pagini10.optimal Transmission p.71-76 17july2010huamanahuiÎncă nu există evaluări
- Adams 2000Document18 paginiAdams 2000Danilo AlexandreÎncă nu există evaluări
- Robust Algorithms For Online Convex Problems Via Primal-DualDocument22 paginiRobust Algorithms For Online Convex Problems Via Primal-DualcavemolinaroÎncă nu există evaluări
- K Dim DCDocument16 paginiK Dim DCKedar KatabathulaÎncă nu există evaluări
- An Efficient Deflation Technique For The Communication-Avoiding Conjugate Gradient MethodDocument17 paginiAn Efficient Deflation Technique For The Communication-Avoiding Conjugate Gradient MethodSana JameelÎncă nu există evaluări
- ADA SolBank FinalDocument80 paginiADA SolBank Finalganashreep2003Încă nu există evaluări
- Multigrid methods for isogeometric discretizationDocument13 paginiMultigrid methods for isogeometric discretizationtomar_skÎncă nu există evaluări
- Congestion Management Using Genetic Algorithm in DDocument6 paginiCongestion Management Using Genetic Algorithm in DmuqthiarÎncă nu există evaluări
- Rate Optimization For Multiuser MIMO Systems With Linear ProcessingDocument11 paginiRate Optimization For Multiuser MIMO Systems With Linear ProcessingTươi Những Chàng TraiÎncă nu există evaluări
- Matching Is As Easy As Matrix Inversion: Ketan Mulmuley 'Document10 paginiMatching Is As Easy As Matrix Inversion: Ketan Mulmuley 'skbÎncă nu există evaluări
- pp105 128Document24 paginipp105 128Luis FuentesÎncă nu există evaluări
- Ain Shams Engineering Journal: Amr M. Ibrahim, Rania A. SwiefDocument12 paginiAin Shams Engineering Journal: Amr M. Ibrahim, Rania A. SwiefKaiba SetoÎncă nu există evaluări
- QAB B IEEETrans SMCDocument11 paginiQAB B IEEETrans SMCDucky93Încă nu există evaluări
- Danial Marx Param Compl ApproxDocument19 paginiDanial Marx Param Compl ApproxJiong GuoÎncă nu există evaluări
- On-Line Resource Management With Application To Routing and SchedulingDocument28 paginiOn-Line Resource Management With Application To Routing and SchedulingpostscriptÎncă nu există evaluări
- LIPIcs ESA 2018 1Document14 paginiLIPIcs ESA 2018 1Ibrahim MlaouhiÎncă nu există evaluări
- Spectral Methods Meet EM A Provably Optimal Algorithm For CrowdsourcingDocument9 paginiSpectral Methods Meet EM A Provably Optimal Algorithm For Crowdsourcingmorteza hosseiniÎncă nu există evaluări
- Understanding Gigabit Switches with MethodologyDocument4 paginiUnderstanding Gigabit Switches with MethodologyLarchÎncă nu există evaluări
- Adaptive Relative Bundle AdjustmentDocument8 paginiAdaptive Relative Bundle AdjustmentIan MedeirosÎncă nu există evaluări
- Designing Broad-Band Patch Antennas Using The Sequential Quadratic Programming MethodDocument4 paginiDesigning Broad-Band Patch Antennas Using The Sequential Quadratic Programming MethodNageswara Rao ChallaÎncă nu există evaluări
- Kaveh 2009Document12 paginiKaveh 2009KOHOLE WENCESLASÎncă nu există evaluări
- Ohm's Law Simulation for Random MediaDocument2 paginiOhm's Law Simulation for Random MediaShashank GangradeÎncă nu există evaluări
- Robust Optimization With Simulated AnnealingDocument13 paginiRobust Optimization With Simulated Annealingjihanemanar72Încă nu există evaluări
- Weighted Subspace Fitting For Two-Dimension DOA Estimation in Massive MIMO SystemsDocument8 paginiWeighted Subspace Fitting For Two-Dimension DOA Estimation in Massive MIMO SystemsJavier MelendrezÎncă nu există evaluări
- Bumblebee: Secure Two-Party Inference Framework For Large TransformersDocument18 paginiBumblebee: Secure Two-Party Inference Framework For Large TransformersaaaÎncă nu există evaluări
- The Yield-Line Method For Concrete Slabs: Automated at LastDocument11 paginiThe Yield-Line Method For Concrete Slabs: Automated at LastMudassar KhanÎncă nu există evaluări
- Abido InderscienceDocument15 paginiAbido IndersciencerameshsmeÎncă nu există evaluări
- Linear ProgrammingDocument8 paginiLinear ProgrammingTsaone FoxÎncă nu există evaluări
- Topology Optimization For Dynamic Scaling Application Using A Gradient-Based Optimization ApproachDocument10 paginiTopology Optimization For Dynamic Scaling Application Using A Gradient-Based Optimization ApproachKalyude DiógenesÎncă nu există evaluări
- Isogeometric Analysis of Shear Bands PDFDocument19 paginiIsogeometric Analysis of Shear Bands PDFficuniÎncă nu există evaluări
- Clustering categorical data using a mutual information based algorithmDocument11 paginiClustering categorical data using a mutual information based algorithmmikypetroviciÎncă nu există evaluări
- Parallel String Matching Algorithms : ElecteDocument28 paginiParallel String Matching Algorithms : ElecteHassan Abed AliÎncă nu există evaluări
- Aco 2022Document18 paginiAco 2022riad bouaitaÎncă nu există evaluări
- Combinatorial Approximation Algorithms For Generalized Flow ProblemsDocument35 paginiCombinatorial Approximation Algorithms For Generalized Flow ProblemsParamasivam VeerappanÎncă nu există evaluări
- Scheduling and Resource Allocation in OFDMA Wireless SystemsDocument39 paginiScheduling and Resource Allocation in OFDMA Wireless SystemsJulita CicconeÎncă nu există evaluări
- Adaptive Graph Regularized Low–Rank Matrix Factorization for Robust ClusteringDocument13 paginiAdaptive Graph Regularized Low–Rank Matrix Factorization for Robust ClusteringablaoublasÎncă nu există evaluări
- Cross-Layer Design of Wireless Multihop Backhaul Networks With Multiantenna BeamformingDocument11 paginiCross-Layer Design of Wireless Multihop Backhaul Networks With Multiantenna Beamforming이영희Încă nu există evaluări
- A Comparative Study of Energy Minimization Methods For Markov Random FieldsDocument14 paginiA Comparative Study of Energy Minimization Methods For Markov Random Fieldsmeomuop2508Încă nu există evaluări
- EdcDocument25 paginiEdcpostscriptÎncă nu există evaluări
- PatentsDocument9 paginiPatentspostscript100% (1)
- ?vfvcdtyvz - F - XV - Z - Uvcdtyczwev - Cvzyvuvdd73: Cva'Ce?'"%Document14 pagini?vfvcdtyvz - F - XV - Z - Uvcdtyczwev - Cvzyvuvdd73: Cva'Ce?'"%postscriptÎncă nu există evaluări
- Wenke Discex00Document15 paginiWenke Discex00postscriptÎncă nu există evaluări
- PRPR 0118Document6 paginiPRPR 0118postscriptÎncă nu există evaluări
- Scalable, Tax Evasion-Free Anonymous InvestingDocument8 paginiScalable, Tax Evasion-Free Anonymous InvestingpostscriptÎncă nu există evaluări
- 20 AmortDocument7 pagini20 AmortpostscriptÎncă nu există evaluări
- It2 Fact SheetDocument2 paginiIt2 Fact SheetpostscriptÎncă nu există evaluări
- Is Lumpy Investment Relevant For The Business Cycle?Document31 paginiIs Lumpy Investment Relevant For The Business Cycle?postscriptÎncă nu există evaluări
- Chip To Kapton Bonding Procedur1Document4 paginiChip To Kapton Bonding Procedur1postscriptÎncă nu există evaluări
- Approximating Prices of Bonds With Log - Normal Interest RateDocument17 paginiApproximating Prices of Bonds With Log - Normal Interest RatepostscriptÎncă nu există evaluări
- TestsecDocument5 paginiTestsecpostscriptÎncă nu există evaluări
- Solution To Mock Midterm 2: 1 Allais-Baumol-Tobin ModelDocument4 paginiSolution To Mock Midterm 2: 1 Allais-Baumol-Tobin ModelpostscriptÎncă nu există evaluări
- C M S 2004 International Press Vol. 2, No. 1, Pp. 137-144: Omm. Ath. CIDocument8 paginiC M S 2004 International Press Vol. 2, No. 1, Pp. 137-144: Omm. Ath. CIpostscriptÎncă nu există evaluări
- Improving Dense Packings of Equal Disks in A Square: N N M M N NDocument9 paginiImproving Dense Packings of Equal Disks in A Square: N N M M N NpostscriptÎncă nu există evaluări
- Lec 6Document6 paginiLec 6postscriptÎncă nu există evaluări
- PaperDocument4 paginiPaperpostscriptÎncă nu există evaluări
- Srikant SlidesDocument27 paginiSrikant SlidespostscriptÎncă nu există evaluări
- Hagjoy 10 CMPDocument31 paginiHagjoy 10 CMPpostscriptÎncă nu există evaluări
- SnackenDocument9 paginiSnackenpostscriptÎncă nu există evaluări
- LM 02Document12 paginiLM 02postscriptÎncă nu există evaluări
- HagjoycombesDocument12 paginiHagjoycombespostscriptÎncă nu există evaluări
- CVDocument12 paginiCVpostscriptÎncă nu există evaluări
- Encouraging Cooperative Solution of Mathematics ProblemsDocument9 paginiEncouraging Cooperative Solution of Mathematics ProblemspostscriptÎncă nu există evaluări
- Corporate Hedging: What, Why and How?Document48 paginiCorporate Hedging: What, Why and How?postscriptÎncă nu există evaluări
- ZengerDocument38 paginiZengerpostscriptÎncă nu există evaluări
- NM Ad'S Statement of Disclosure: Mrose - Iesg@dbc - Mtview.ca - UsDocument13 paginiNM Ad'S Statement of Disclosure: Mrose - Iesg@dbc - Mtview.ca - UspostscriptÎncă nu există evaluări
- Net NeutralityDocument19 paginiNet Neutralitypostscript100% (1)
- BrnoDocument35 paginiBrnopostscriptÎncă nu există evaluări
- Gaining Confidence in Mathematics: Instructional Technology For GirlsDocument8 paginiGaining Confidence in Mathematics: Instructional Technology For GirlspostscriptÎncă nu există evaluări
- Haramaya University: College of Business and EconomicsDocument48 paginiHaramaya University: College of Business and EconomicsYG DEÎncă nu există evaluări
- Artificial Neural Networks - Short AnswersDocument5 paginiArtificial Neural Networks - Short AnswersMmk ReddyÎncă nu există evaluări
- 15.053 - Optimization Methods in Management Science (Spring 2007) Problem Set 7Document11 pagini15.053 - Optimization Methods in Management Science (Spring 2007) Problem Set 7Ehsan SpencerÎncă nu există evaluări
- DSC NptelDocument6 paginiDSC NptelAli KamilÎncă nu există evaluări
- Lecture HW 04 RootsDocument12 paginiLecture HW 04 RootssmashthecommienwoÎncă nu există evaluări
- Matlab Code For Truss Problem, Generalised ProgramDocument2 paginiMatlab Code For Truss Problem, Generalised ProgramShivdayal Patel80% (5)
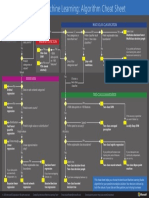
- Microsoft Machine Learning Algorithm Cheat Sheet v2 PDFDocument1 paginăMicrosoft Machine Learning Algorithm Cheat Sheet v2 PDFamitag007100% (1)
- Mesh Free GRLIUDocument42 paginiMesh Free GRLIUSandeepÎncă nu există evaluări
- Allsolvers Using GAMSDocument614 paginiAllsolvers Using GAMSAishatu Musa AbbaÎncă nu există evaluări
- Lecture 10.1Document6 paginiLecture 10.1Quazi Hasnat IrfanÎncă nu există evaluări
- DIPLABMANUALDocument11 paginiDIPLABMANUALKapil KumarÎncă nu există evaluări
- MOCSA: A Multi-Objective Crow Search Algorithm For Multi-Objective OptimizationDocument6 paginiMOCSA: A Multi-Objective Crow Search Algorithm For Multi-Objective OptimizationHamed FarzinÎncă nu există evaluări
- Bessel Filter Crossover and Its Relation To OthersDocument8 paginiBessel Filter Crossover and Its Relation To OthersSt ChristianÎncă nu există evaluări
- Complete Damath 4Document13 paginiComplete Damath 4Mario M. Ramon89% (9)
- PR - Exam - WS21 - 22 SolDocument19 paginiPR - Exam - WS21 - 22 SolJohn FilixÎncă nu există evaluări
- The Reaper Cock Os Ef F Ect S Summaryguide: Supplem Ent T O Reaper User GuideDocument58 paginiThe Reaper Cock Os Ef F Ect S Summaryguide: Supplem Ent T O Reaper User GuidelinuspaulÎncă nu există evaluări
- Network Learning (Training)Document29 paginiNetwork Learning (Training)Luca GuglielmiÎncă nu există evaluări
- Binary CodesDocument13 paginiBinary CodesLarisa WahlangÎncă nu există evaluări
- ELEC3104 Summer 2009-2010Document9 paginiELEC3104 Summer 2009-2010pappuloguÎncă nu există evaluări
- Image Stitching Based On Corner DetectionDocument4 paginiImage Stitching Based On Corner DetectionEditor IJRITCCÎncă nu există evaluări
- DIP3E Chapter03 ArtDocument64 paginiDIP3E Chapter03 ArtThippeswamy KhÎncă nu există evaluări
- Nishant PythonDocument8 paginiNishant PythongrindmotherfckrÎncă nu există evaluări
- Insertion SortDocument16 paginiInsertion SortSandra JacobÎncă nu există evaluări
- InTech-Hilbert Transform and ApplicationsDocument11 paginiInTech-Hilbert Transform and ApplicationsDody Pratama GintingÎncă nu există evaluări
- Transportation Problem 1Document9 paginiTransportation Problem 1akash patilÎncă nu există evaluări
- Decision Tree Entropy GiniDocument5 paginiDecision Tree Entropy GiniSudheer RedusÎncă nu există evaluări
- Optimum Coordination of Overcurrent Relays in Distribution System Using Genetic AlgorithmDocument6 paginiOptimum Coordination of Overcurrent Relays in Distribution System Using Genetic AlgorithmAswin Dilip KumarÎncă nu există evaluări
- AdV Math Term End ProjectDocument4 paginiAdV Math Term End ProjectravenÎncă nu există evaluări
- Maths QQDocument10 paginiMaths QQaiswarya machavaramÎncă nu există evaluări
- Top Coder All TutorialsDocument205 paginiTop Coder All TutorialsFahim SaÎncă nu există evaluări
- Nine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersDe la EverandNine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersEvaluare: 5 din 5 stele5/5 (7)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.De la EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Evaluare: 5 din 5 stele5/5 (34)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceDe la EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceÎncă nu există evaluări
- The Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!De la EverandThe Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!Evaluare: 4.5 din 5 stele4.5/5 (2)
- Clean Code: A Handbook of Agile Software CraftsmanshipDe la EverandClean Code: A Handbook of Agile Software CraftsmanshipEvaluare: 5 din 5 stele5/5 (13)
- Software Engineering at Google: Lessons Learned from Programming Over TimeDe la EverandSoftware Engineering at Google: Lessons Learned from Programming Over TimeEvaluare: 4 din 5 stele4/5 (11)
- Linux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepDe la EverandLinux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepEvaluare: 4.5 din 5 stele4.5/5 (9)
- Monitored: Business and Surveillance in a Time of Big DataDe la EverandMonitored: Business and Surveillance in a Time of Big DataEvaluare: 4 din 5 stele4/5 (1)
- Coding for Beginners and Kids Using Python: Python Basics for Beginners, High School Students and Teens Using Project Based LearningDe la EverandCoding for Beginners and Kids Using Python: Python Basics for Beginners, High School Students and Teens Using Project Based LearningEvaluare: 3 din 5 stele3/5 (1)
- Introducing Python: Modern Computing in Simple Packages, 2nd EditionDe la EverandIntroducing Python: Modern Computing in Simple Packages, 2nd EditionEvaluare: 4 din 5 stele4/5 (7)
- What Algorithms Want: Imagination in the Age of ComputingDe la EverandWhat Algorithms Want: Imagination in the Age of ComputingEvaluare: 3.5 din 5 stele3.5/5 (41)
- GROKKING ALGORITHMS: Simple and Effective Methods to Grokking Deep Learning and Machine LearningDe la EverandGROKKING ALGORITHMS: Simple and Effective Methods to Grokking Deep Learning and Machine LearningÎncă nu există evaluări
- Generative Art: A practical guide using ProcessingDe la EverandGenerative Art: A practical guide using ProcessingEvaluare: 4 din 5 stele4/5 (4)
- Agile Metrics in Action: How to measure and improve team performanceDe la EverandAgile Metrics in Action: How to measure and improve team performanceÎncă nu există evaluări
- Python Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)De la EverandPython Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)Evaluare: 5 din 5 stele5/5 (1)
- Python Programming : How to Code Python Fast In Just 24 Hours With 7 Simple StepsDe la EverandPython Programming : How to Code Python Fast In Just 24 Hours With 7 Simple StepsEvaluare: 3.5 din 5 stele3.5/5 (54)
- Python for Data Analysis: A Beginners Guide to Master the Fundamentals of Data Science and Data Analysis by Using Pandas, Numpy and IpythonDe la EverandPython for Data Analysis: A Beginners Guide to Master the Fundamentals of Data Science and Data Analysis by Using Pandas, Numpy and IpythonÎncă nu există evaluări
- Elden Ring Analysis & Review: Understand the Depth of Philosophical GameplayDe la EverandElden Ring Analysis & Review: Understand the Depth of Philosophical GameplayÎncă nu există evaluări
- Unit Testing Principles, Practices, and PatternsDe la EverandUnit Testing Principles, Practices, and PatternsEvaluare: 4 din 5 stele4/5 (3)