S-ar putea să vă placă și
- 1006TG2 YB35013 Parts ManualDocument189 pagini1006TG2 YB35013 Parts ManualSathya Narayana70% (10)
- Schwing SP 500 EnglishDocument222 paginiSchwing SP 500 EnglishManuel Andres Manrique Lopez92% (12)
- WorksheetDocument3 paginiWorksheetdanielÎncă nu există evaluări
- HW #3 Book ProblemsDocument5 paginiHW #3 Book Problemsjackalscream910% (1)
- Assignment 2Document2 paginiAssignment 2ni60Încă nu există evaluări
- 2D Axisymmetric Threaded Connection: © 2011 ANSYS, Inc. July 12, 2013 1Document16 pagini2D Axisymmetric Threaded Connection: © 2011 ANSYS, Inc. July 12, 2013 1minhnguyenvonhatÎncă nu există evaluări
- Inverse Kinematics PUMA 762 SimulatorDocument1 paginăInverse Kinematics PUMA 762 SimulatorMuhammad ZulfiqarÎncă nu există evaluări
- Applications of Variational Inequalities in Stochastic ControlDe la EverandApplications of Variational Inequalities in Stochastic ControlEvaluare: 2 din 5 stele2/5 (1)
- BRH 625 Sandvi̇k BreakerDocument87 paginiBRH 625 Sandvi̇k BreakerSerkanAl100% (1)
- PDFDocument44 paginiPDFRebecca Hartman75% (4)
- Experiment No.03: Mathematical Modeling of Physical System: ObjectiveDocument5 paginiExperiment No.03: Mathematical Modeling of Physical System: ObjectiveSao SavathÎncă nu există evaluări
- Ps 3Document3 paginiPs 3Yusuf Sahin0% (1)
- Classical 093Document33 paginiClassical 093Julian David Henao EscobarÎncă nu există evaluări
- Dynamixel GuideDocument7 paginiDynamixel GuidemsdoharÎncă nu există evaluări
- Kinematic Analysis of 5 Dof Lynx ArmDocument6 paginiKinematic Analysis of 5 Dof Lynx ArmsathyaÎncă nu există evaluări
- Mech3030 T3 2019Document28 paginiMech3030 T3 2019女孩們拆電腦Încă nu există evaluări
- Mechanism DesignDocument30 paginiMechanism DesignBivas Panigrahi0% (1)
- Design and Fabrication of A GripperDocument8 paginiDesign and Fabrication of A Gripperengr_faheemÎncă nu există evaluări
- Ambuj Gupta : I. D. No. 46671 ObjectiveDocument1 paginăAmbuj Gupta : I. D. No. 46671 ObjectiveAmbujÎncă nu există evaluări
- Manipulator KinematicsDocument24 paginiManipulator KinematicsQueron Williams100% (2)
- Chapter 3Document58 paginiChapter 3ketemaÎncă nu există evaluări
- JacobianDocument3 paginiJacobianAtse Dida Eyes0% (1)
- Designing A Neuro PD With Gravity Compensation For Six Legged RobotDocument8 paginiDesigning A Neuro PD With Gravity Compensation For Six Legged RobotVishwanath KetkarÎncă nu există evaluări
- DH ParametersDocument18 paginiDH ParameterswasifazimÎncă nu există evaluări
- Tutorial Scilab Xcos Modelica Part3 0Document19 paginiTutorial Scilab Xcos Modelica Part3 0Idul Azharul HoqueÎncă nu există evaluări
- Solution 2Document5 paginiSolution 2Paulina MarquezÎncă nu există evaluări
- ME427 LEC11 Forward KinameticsDocument15 paginiME427 LEC11 Forward KinameticsSohaib IrfanÎncă nu există evaluări
- Typical World Coordinates Are: Pos X-Axis Right Pos Y-Axis Back Pos Z-Axis UpDocument2 paginiTypical World Coordinates Are: Pos X-Axis Right Pos Y-Axis Back Pos Z-Axis UpSabrinadeFeraÎncă nu există evaluări
- Lec8 Inverse KinematicsDocument32 paginiLec8 Inverse KinematicsbalkyderÎncă nu există evaluări
- Mechanism Final ProjectDocument14 paginiMechanism Final Projectsundari_murali100% (2)
- Inverse Kinematics PPT (Pak Toni)Document14 paginiInverse Kinematics PPT (Pak Toni)herawanadifÎncă nu există evaluări
- Course Name: Mechanism and Robot Kinematics Assignment-3Document13 paginiCourse Name: Mechanism and Robot Kinematics Assignment-3shrimanÎncă nu există evaluări
- Direct KinematicsDocument66 paginiDirect KinematicsMateen Qadri100% (2)
- DESIGN OF MACHINERY - Problem 4-18gDocument2 paginiDESIGN OF MACHINERY - Problem 4-18gGiordano VieiraÎncă nu există evaluări
- Chapter 11: Dynamic Force AnalysisDocument34 paginiChapter 11: Dynamic Force AnalysisSurenderan LoganÎncă nu există evaluări
- D-H Problems PDFDocument9 paginiD-H Problems PDFkrupachariÎncă nu există evaluări
- Assignment 2Document5 paginiAssignment 2aiao90Încă nu există evaluări
- Paper171 I.banuDocument6 paginiPaper171 I.banuIoan-Viorel BanuÎncă nu există evaluări
- Chapter 6 1Document26 paginiChapter 6 1Nyein Aye MyatÎncă nu există evaluări
- r05320305 Design of Machine Members IIDocument11 paginir05320305 Design of Machine Members IISrinivasa Rao G100% (4)
- Numerical Control and Industrial Robotics: Review QuestionsDocument9 paginiNumerical Control and Industrial Robotics: Review QuestionsDavid GonzalezÎncă nu există evaluări
- Position Control of Pick and Place Robotic ArmDocument5 paginiPosition Control of Pick and Place Robotic Armavinashs2410_41108610% (1)
- Basu-Fem Notes Me623Document210 paginiBasu-Fem Notes Me623Subhradeep ChatterjeeÎncă nu există evaluări
- Dynamic Mobile Robot Paper 1Document6 paginiDynamic Mobile Robot Paper 1pgamasterÎncă nu există evaluări
- Sheet 8Document1 paginăSheet 8fuÎncă nu există evaluări
- ROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliDocument10 paginiROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliMahendra Babu Mekala100% (2)
- Robotics: Dynamic Model of ManipulatorsDocument20 paginiRobotics: Dynamic Model of ManipulatorsbalkyderÎncă nu există evaluări
- Jacobian and Static ForceDocument35 paginiJacobian and Static ForcesivaeeinfoÎncă nu există evaluări
- A Review of Models and Structures For Wheeled Mobile Robots - Four Case StudiesDocument6 paginiA Review of Models and Structures For Wheeled Mobile Robots - Four Case StudiesThanh NguyenÎncă nu există evaluări
- 1406 Advanced Kinematics and Dynamics of MachineryDocument13 pagini1406 Advanced Kinematics and Dynamics of MachineryChiranjeev JainÎncă nu există evaluări
- Mechatronics (2015) Unit IIDocument38 paginiMechatronics (2015) Unit IIkishan100% (1)
- Multibody System Simulation With SimmechanicsDocument24 paginiMultibody System Simulation With SimmechanicsSonny Jason AÎncă nu există evaluări
- Lab 3Document7 paginiLab 3jisteeleÎncă nu există evaluări
- Design & Fabrication of Soft Robotic Gripper For Handling Fragile ObjectsDocument42 paginiDesign & Fabrication of Soft Robotic Gripper For Handling Fragile Objectssaisrini98Încă nu există evaluări
- Jacobian: Dr. Shady A. MagedDocument44 paginiJacobian: Dr. Shady A. MagedpeterwalidÎncă nu există evaluări
- J OperatorDocument6 paginiJ OperatorManikandan SundararajÎncă nu există evaluări
- Denavit Hartenberg ConventionDocument17 paginiDenavit Hartenberg Conventionshobri49Încă nu există evaluări
- Gyroscope: Gyre' Is A Greek Word, Meaning Circular Motion' and Gyration Means The WhirlingDocument53 paginiGyroscope: Gyre' Is A Greek Word, Meaning Circular Motion' and Gyration Means The WhirlingDeva ChÎncă nu există evaluări
- Mechanical Vibrations QuestionDocument1 paginăMechanical Vibrations QuestionFadi W MoussaÎncă nu există evaluări
- Robotics - Mumbai Univ - Sem 8 ElexDocument8 paginiRobotics - Mumbai Univ - Sem 8 Elex111ashwin0% (1)
- Ps 1Document3 paginiPs 1rhusseinpos4765Încă nu există evaluări
- Control System Assignment 1Document4 paginiControl System Assignment 1atharvaÎncă nu există evaluări
- 1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorDocument5 pagini1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorRajalakshmi TVÎncă nu există evaluări
- CALIBRATIONDocument5 paginiCALIBRATIONOlga Joy Labajo GerastaÎncă nu există evaluări
- ADI - User Manual 1Document333 paginiADI - User Manual 1Olga Joy Labajo GerastaÎncă nu există evaluări
- To ToaDocument4 paginiTo ToaOlga Joy Labajo GerastaÎncă nu există evaluări
- WIPL-D Pro: What Is New in v12.0?: 1. Extended - Extreme LimitsDocument8 paginiWIPL-D Pro: What Is New in v12.0?: 1. Extended - Extreme LimitsOlga Joy Labajo GerastaÎncă nu există evaluări
- WIPL-D Validates Babinet PDFDocument3 paginiWIPL-D Validates Babinet PDFOlga Joy Labajo GerastaÎncă nu există evaluări
- 10 1 1 198 5804 PDFDocument9 pagini10 1 1 198 5804 PDFOlga Joy Labajo GerastaÎncă nu există evaluări
- Poprzen NemanjaDocument6 paginiPoprzen NemanjaOlga Joy Labajo GerastaÎncă nu există evaluări
- Metering Installation Requirements: Table of Contents - Section 300Document47 paginiMetering Installation Requirements: Table of Contents - Section 300Olga Joy Labajo GerastaÎncă nu există evaluări
- Control Panel With Time Switch For Indoor/Outdoor Use: DangerDocument4 paginiControl Panel With Time Switch For Indoor/Outdoor Use: DangerOlga Joy Labajo GerastaÎncă nu există evaluări
- Metering Installation Requirements: Table of Contents - Section 300Document47 paginiMetering Installation Requirements: Table of Contents - Section 300Olga Joy Labajo GerastaÎncă nu există evaluări
- Thiru ProjDocument37 paginiThiru ProjOlga Joy Labajo GerastaÎncă nu există evaluări
- Engine Manual of WeichaiDocument121 paginiEngine Manual of Weichaizein zee100% (9)
- Repair Manual ZF 63 Iv - ZF 80 Iv - ZF 80-1 Iv - ZF 85 IV Code 310.01.0009hDocument110 paginiRepair Manual ZF 63 Iv - ZF 80 Iv - ZF 80-1 Iv - ZF 85 IV Code 310.01.0009hEdwin Enrique OsorioÎncă nu există evaluări
- Compressed Air MonitoringDocument4 paginiCompressed Air MonitoringRonak JoshiÎncă nu există evaluări
- Facts at Your Fingertips-201104-Hopper Inserts For Improved Solids FlowDocument1 paginăFacts at Your Fingertips-201104-Hopper Inserts For Improved Solids Flowonizuka-t2263Încă nu există evaluări
- Manual Msi3 A4 en ScreenDocument8 paginiManual Msi3 A4 en ScreenVladÎncă nu există evaluări
- Flat Wakaf Mek Zainab P1Document1 paginăFlat Wakaf Mek Zainab P1Nur NaziraÎncă nu există evaluări
- Alumax - SpaceframeDocument4 paginiAlumax - SpaceframePrasenjit AdhikaryÎncă nu există evaluări
- MIDAS ChecklistDocument27 paginiMIDAS ChecklistBhagirath JoshiÎncă nu există evaluări
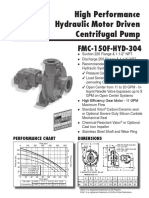
- FMC-150F-HYD-304 - 04-13 Bomba AceDocument2 paginiFMC-150F-HYD-304 - 04-13 Bomba AceEmerson GomesÎncă nu există evaluări
- Fabrication of Turbocharger For Two Wheeler: Ahir Nischal A, Sofia Ali A, Darshan S Shah, Sneh R PrajapatiDocument8 paginiFabrication of Turbocharger For Two Wheeler: Ahir Nischal A, Sofia Ali A, Darshan S Shah, Sneh R PrajapatiDeepak sutarÎncă nu există evaluări
- Mission Centrifugal PumpsDocument60 paginiMission Centrifugal PumpsWell Site Ranger100% (2)
- Chapter - 7 Part I STDDocument75 paginiChapter - 7 Part I STDBelkacem Achour100% (1)
- F885-84 (2011) Standard Specification for Envelope Dimensions for Bronze Globe Valves NPS 1ظ - - 4 to 2Document3 paginiF885-84 (2011) Standard Specification for Envelope Dimensions for Bronze Globe Valves NPS 1ظ - - 4 to 2islamakthamÎncă nu există evaluări
- 2p36907 SwivelDocument42 pagini2p36907 SwivelIFI ARGENTINA S.A.Încă nu există evaluări
- Manufacturing Processes Ch.4 (10 and 11) CastingDocument143 paginiManufacturing Processes Ch.4 (10 and 11) Castingashoku24007Încă nu există evaluări
- Simulation and Analysis of Ballistic Impact UsingDocument8 paginiSimulation and Analysis of Ballistic Impact UsingSaeid VarmazyariÎncă nu există evaluări
- PARKER TGK/THK MotorDocument36 paginiPARKER TGK/THK MotorgugiÎncă nu există evaluări
- Angular GripperDocument12 paginiAngular GripperAman RajÎncă nu există evaluări
- Aggregate Crushing Value Test For AggregateDocument2 paginiAggregate Crushing Value Test For AggregateQuality JamÎncă nu există evaluări
- Experiment No.1 ObjectiveDocument4 paginiExperiment No.1 ObjectivealiÎncă nu există evaluări
- Tech Spec For Centrifugal PumpDocument5 paginiTech Spec For Centrifugal PumpRoby Mirza100% (1)
- Liquid Limit Arugolanu 1Document3 paginiLiquid Limit Arugolanu 1Durga Rama Swamy KalvakolanuÎncă nu există evaluări
- D399 AttachmentDocument50 paginiD399 AttachmentNOUR ZAINÎncă nu există evaluări
- Chapter 5 - Exhaust SystemsDocument26 paginiChapter 5 - Exhaust SystemsVin KenÎncă nu există evaluări
- AFL PED CertificateDocument4 paginiAFL PED CertificateretrogradesÎncă nu există evaluări
- Santilli 1994Document12 paginiSantilli 1994aminardakaniÎncă nu există evaluări