S-ar putea să vă placă și
- Graphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")De la EverandGraphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Evaluare: 4 din 5 stele4/5 (2)
- Control Matlab Commands ListDocument4 paginiControl Matlab Commands ListM.VekateshkumarÎncă nu există evaluări
- Nonlinear Control Feedback Linearization Sliding Mode ControlDe la EverandNonlinear Control Feedback Linearization Sliding Mode ControlÎncă nu există evaluări
- Acker Place Bode Margin c2dm: Command DescriptionDocument2 paginiAcker Place Bode Margin c2dm: Command DescriptiondawadhaliÎncă nu există evaluări
- Commonly Used Matlab Commands: Command DescriptionDocument3 paginiCommonly Used Matlab Commands: Command DescriptionKaran KeherÎncă nu există evaluări
- MATLAB CommandDocument3 paginiMATLAB CommandVineeth Krishna VenuÎncă nu există evaluări
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"De la EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Evaluare: 2.5 din 5 stele2.5/5 (2)
- Simulink Basics TutorialDocument48 paginiSimulink Basics Tutorialyun haeÎncă nu există evaluări
- Statistical Data Cleaning with Applications in RDe la EverandStatistical Data Cleaning with Applications in RÎncă nu există evaluări
- Control System Lab Manual (Kec-652)Document29 paginiControl System Lab Manual (Kec-652)VIKASH YADAVÎncă nu există evaluări
- Analog Automation and Digital Feedback Control TechniquesDe la EverandAnalog Automation and Digital Feedback Control TechniquesÎncă nu există evaluări
- Using Matlab: Page 1 of 3 Spring Semester 2012Document3 paginiUsing Matlab: Page 1 of 3 Spring Semester 2012Alexand MelialaÎncă nu există evaluări
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningDe la EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningÎncă nu există evaluări
- Continuous & Discreate Control SystemsDocument71 paginiContinuous & Discreate Control Systemssatishdanu5955Încă nu există evaluări
- Common Matlab Commands and FunctionsDocument5 paginiCommon Matlab Commands and FunctionsrosieÎncă nu există evaluări
- Control System Design of LTI Systems Using MATLABDocument77 paginiControl System Design of LTI Systems Using MATLABChawalit WutiananchaiÎncă nu există evaluări
- NI Tutorial 6463 enDocument6 paginiNI Tutorial 6463 enAmaury BarronÎncă nu există evaluări
- ENGR 058 (Control Theory) Final: 1) Define The SystemDocument24 paginiENGR 058 (Control Theory) Final: 1) Define The SystemBizzleJohnÎncă nu există evaluări
- MATLAB Aided Control System Design Conventional ControlDocument16 paginiMATLAB Aided Control System Design Conventional Controldavid_29Încă nu există evaluări
- Digital Control TutorialDocument27 paginiDigital Control TutorialNatalia BonillaÎncă nu există evaluări
- Department of Electrical and Electronics Engineering Matlab Theory and Practice (ELEC 403) Module V, Assignment 5Document6 paginiDepartment of Electrical and Electronics Engineering Matlab Theory and Practice (ELEC 403) Module V, Assignment 5BABAJIÎncă nu există evaluări
- RTSXcmdrefDocument86 paginiRTSXcmdrefAntonio AlbieroÎncă nu există evaluări
- Digital Control TutorialDocument12 paginiDigital Control TutorialDan AnghelÎncă nu există evaluări
- Activity01 (1) CarreonDocument14 paginiActivity01 (1) CarreonHaja Kiev Erenz CarreonÎncă nu există evaluări
- Expt 4 First Order SystemDocument4 paginiExpt 4 First Order SystemAngelo Legarda De CastroÎncă nu există evaluări
- Lab 3 - Introduction To MATLAB: G(S) S (S + 1) (S + 2)Document3 paginiLab 3 - Introduction To MATLAB: G(S) S (S + 1) (S + 2)saharÎncă nu există evaluări
- Manual - Control System LabDocument20 paginiManual - Control System LabRanjan mishraÎncă nu există evaluări
- Program CC Command ListDocument12 paginiProgram CC Command ListGabriel BarbachanoÎncă nu există evaluări
- Matlab Laboratory (ELEC-323) Session III: Second-Order Systems 1. OverviewDocument4 paginiMatlab Laboratory (ELEC-323) Session III: Second-Order Systems 1. Overviewfancy_maskÎncă nu există evaluări
- Linear Programming With MATLABDocument51 paginiLinear Programming With MATLABTangerine DianeÎncă nu există evaluări
- Control Tutorials For MATLAB and Simulink - Index - MATLAB Commands ListDocument4 paginiControl Tutorials For MATLAB and Simulink - Index - MATLAB Commands ListYasir AlameenÎncă nu există evaluări
- MatlabTutorial Lec1Document40 paginiMatlabTutorial Lec1kamrulahsan06Încă nu există evaluări
- Eee 336 L8Document12 paginiEee 336 L8Rezwan ZakariaÎncă nu există evaluări
- Matlab TutorialDocument90 paginiMatlab Tutorialroghani50% (2)
- CS Exp 8Document7 paginiCS Exp 8Anirudh MittalÎncă nu există evaluări
- Ident Ref PDFDocument1.592 paginiIdent Ref PDFTHuy Dv100% (1)
- Introduction Ao MatlabDocument52 paginiIntroduction Ao MatlabMiquéias Do Prado GuimarãesÎncă nu există evaluări
- Control Systems Lab Manual in Sci LabDocument28 paginiControl Systems Lab Manual in Sci LabJames Matthew WongÎncă nu există evaluări
- Activity 02Document17 paginiActivity 02Rolando CruzÎncă nu există evaluări
- Matlab CommandsDocument4 paginiMatlab CommandsArmando BaronÎncă nu există evaluări
- Lab 2Document13 paginiLab 2ahmedÎncă nu există evaluări
- Matlab CommandsDocument15 paginiMatlab Commandsamila883Încă nu există evaluări
- Control Systems Design ToolsDocument9 paginiControl Systems Design ToolsTeguh SantosoÎncă nu există evaluări
- CONTROL SYSTEM Lab ManualDocument17 paginiCONTROL SYSTEM Lab ManualMahavir ChavdaÎncă nu există evaluări
- Matlab Intro11.12.08 SinaDocument26 paginiMatlab Intro11.12.08 SinaBernard KendaÎncă nu există evaluări
- MATLAB Animation IIDocument8 paginiMATLAB Animation IIa_minisoft2005Încă nu există evaluări
- Matlab PDFDocument75 paginiMatlab PDFDHRUV UPADHAYAÎncă nu există evaluări
- Inverted Pendulum State-Space Methods For Controller DesignDocument16 paginiInverted Pendulum State-Space Methods For Controller DesignReyes_nÎncă nu există evaluări
- Fakultas Teknik Universitas Negeri Yogyakarta Digital Control SystemDocument9 paginiFakultas Teknik Universitas Negeri Yogyakarta Digital Control SystemErmin HamidovicÎncă nu există evaluări
- Matlab Presentation 1 PDFDocument27 paginiMatlab Presentation 1 PDFtarun7787Încă nu există evaluări
- Ansys CommandDocument4 paginiAnsys CommandSathyamoorthy VenkateshÎncă nu există evaluări
- Introduccion Matlab EmilyDocument99 paginiIntroduccion Matlab EmilyGeorgina Violet RamirezÎncă nu există evaluări
- Gnum Poly ( (3 5) ) Gden Poly ( (-1 - 2) ) Hnum (1) HdenDocument8 paginiGnum Poly ( (3 5) ) Gden Poly ( (-1 - 2) ) Hnum (1) HdenJoshua AbadÎncă nu există evaluări
- Clase Diseño Por Medio Del LGR Usando MatlabDocument42 paginiClase Diseño Por Medio Del LGR Usando MatlabJesus Tapia GallardoÎncă nu există evaluări
- Experiment 2Document16 paginiExperiment 2roxetteÎncă nu există evaluări
- Comm. Sys Lab: SPRING 2013Document85 paginiComm. Sys Lab: SPRING 2013ahmad035Încă nu există evaluări
- MatlabDocument103 paginiMatlabAncaa_pÎncă nu există evaluări
- Matlab Simulink For Control082pDocument39 paginiMatlab Simulink For Control082pWills TtaccaÎncă nu există evaluări
- Implementing A DSB-SC AM Modulator in SimulinkDocument16 paginiImplementing A DSB-SC AM Modulator in Simulinkkhanjamil12Încă nu există evaluări
- EPIRB - Emergency Position Indicating Radio Beacon WorkingDocument3 paginiEPIRB - Emergency Position Indicating Radio Beacon Workingkhanjamil12Încă nu există evaluări
- TRILOGI 5.3 PLC Ladder Diagram Programmer and Simulator A TutorialDocument24 paginiTRILOGI 5.3 PLC Ladder Diagram Programmer and Simulator A Tutorialgopir28Încă nu există evaluări
- AIS (Automatic Identification System) WorkingDocument8 paginiAIS (Automatic Identification System) Workingkhanjamil1250% (2)
- College of Electrical and Mechanical Engineering, NUSTDocument18 paginiCollege of Electrical and Mechanical Engineering, NUSTkhanjamil12Încă nu există evaluări
- Itrilogi RefDocument154 paginiItrilogi RefG.s. VishwanthÎncă nu există evaluări
- CH 140203085002 Phpapp02Document58 paginiCH 140203085002 Phpapp02Adrian ReyesÎncă nu există evaluări
- Lecture Notes For Digital ElectronicsDocument43 paginiLecture Notes For Digital ElectronicsShruti GuptaÎncă nu există evaluări
- Electronic FormulasDocument2 paginiElectronic FormulasSudeesh SubramanianÎncă nu există evaluări
- Diodes NotesDocument27 paginiDiodes Noteskhanjamil12Încă nu există evaluări
- FET Basics 1Document63 paginiFET Basics 1khanjamil12100% (1)
- Lab05 Flip FlopsDocument8 paginiLab05 Flip Flopskhanjamil12Încă nu există evaluări
- Antenna Theory Notes For GateDocument0 paginiAntenna Theory Notes For Gateshrikant_rocks81% (16)
- Lecture Notes For Digital ElectronicsDocument43 paginiLecture Notes For Digital ElectronicsShruti GuptaÎncă nu există evaluări
- Instrumentation Training Tutorial Part1Document6 paginiInstrumentation Training Tutorial Part1Gary8100% (1)
- Shot Term Training Programme On Industrial InstrumentationDocument42 paginiShot Term Training Programme On Industrial Instrumentationkhanjamil1267% (3)
- Diodes NotesDocument27 paginiDiodes Noteskhanjamil12Încă nu există evaluări
- Simple Touch SwitchDocument2 paginiSimple Touch SwitchRahil ShahÎncă nu există evaluări
- APPLICATION GUIDE - PID FunctionDocument43 paginiAPPLICATION GUIDE - PID FunctioniedmondÎncă nu există evaluări
- Transistor Thyristor NotesDocument26 paginiTransistor Thyristor Noteskhanjamil12Încă nu există evaluări
- Boiler Basics PDFDocument5 paginiBoiler Basics PDFEng Waleed MouhammedÎncă nu există evaluări
- Electrical Circuit TheoremsDocument5 paginiElectrical Circuit Theoremshitesh bhoiÎncă nu există evaluări
- Olive BusinessDocument363 paginiOlive Businesskhanjamil12Încă nu există evaluări
- 0 1 2 3 4 5 6 Simatic Hmi: ManualDocument120 pagini0 1 2 3 4 5 6 Simatic Hmi: Manualyukaokto2Încă nu există evaluări
- Ratio ControllerDocument4 paginiRatio ControllersegunoyesÎncă nu există evaluări
- LecDocument5 paginiLeckhanjamil12Încă nu există evaluări
- Wattage of Home AppliancesDocument3 paginiWattage of Home Applianceskhanjamil12Încă nu există evaluări
- Google Gender Pay LawsuitDocument31 paginiGoogle Gender Pay LawsuitUSA TODAYÎncă nu există evaluări
- Atulya Beharwal: Class - 7 ADocument15 paginiAtulya Beharwal: Class - 7 AAtul Beharwal100% (1)
- High Precision Ball Berings GMNDocument72 paginiHigh Precision Ball Berings GMNSilvio Busdraghi AmorosoÎncă nu există evaluări
- Octagonal Blender PDFDocument4 paginiOctagonal Blender PDFMohsinShaikhÎncă nu există evaluări
- Stator Earth Fault in 200MW Generator-A Case StudyDocument5 paginiStator Earth Fault in 200MW Generator-A Case StudylrpatraÎncă nu există evaluări
- Cs6212 Programming and Data Structures Laboratory I Laboratory ManualDocument28 paginiCs6212 Programming and Data Structures Laboratory I Laboratory Manualprasath_676303Încă nu există evaluări
- TEST REPORT After Earth ImprovementDocument3 paginiTEST REPORT After Earth ImprovementShami Mudunkotuwa78% (9)
- Geographic Information System of Public Complaint Testing Based On Mobile WebDocument2 paginiGeographic Information System of Public Complaint Testing Based On Mobile WebArya HardinataÎncă nu există evaluări
- UNNPX206R3Document4 paginiUNNPX206R3David OlayaÎncă nu există evaluări
- TemperaturaDocument2 paginiTemperaturakamalÎncă nu există evaluări
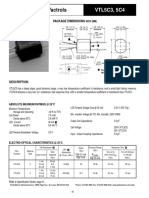
- Low Cost Axial Vactrols: VTL5C3, 5C4Document2 paginiLow Cost Axial Vactrols: VTL5C3, 5C4sillyÎncă nu există evaluări
- Cs Acrovyn CatalogueDocument83 paginiCs Acrovyn CatalogueBoboc AndreiÎncă nu există evaluări
- Aluminium Aluminum 6070 Alloy (UNS A96070)Document2 paginiAluminium Aluminum 6070 Alloy (UNS A96070)HARIPRASATH PÎncă nu există evaluări
- Voltage DetectorsDocument4 paginiVoltage DetectorsKarthik SriramakavachamÎncă nu există evaluări
- 5 Process SynchronizaionDocument58 pagini5 Process SynchronizaionLokesh SainiÎncă nu există evaluări
- Gapura Company Profile - 17mar17Document43 paginiGapura Company Profile - 17mar17als izmiÎncă nu există evaluări
- JSA Basket TransferDocument3 paginiJSA Basket TransferCristina Rican100% (1)
- AC 43.13-1B Section 5 Penetrant InspectionDocument8 paginiAC 43.13-1B Section 5 Penetrant Inspection320338100% (1)
- Akpark: Cover Sheet - ElectricalDocument10 paginiAkpark: Cover Sheet - ElectricalEngr M.Arshad KhalidÎncă nu există evaluări
- 03 Vetotouch Europa - Group 170821Document2 pagini03 Vetotouch Europa - Group 170821HalaÎncă nu există evaluări
- Instructions For Repairing AlternatorDocument3 paginiInstructions For Repairing AlternatordamoccaÎncă nu există evaluări
- 2022 FuturaSun 150m 500W SILK Premium en UnlockedDocument2 pagini2022 FuturaSun 150m 500W SILK Premium en UnlockedEVERY GHSÎncă nu există evaluări
- I20 Key Features Technical Specifications: DimensionsDocument4 paginiI20 Key Features Technical Specifications: Dimensionsvaibhavsaini88Încă nu există evaluări
- EAC PowerPoint Template 2019Document5 paginiEAC PowerPoint Template 2019LeeÎncă nu există evaluări
- Bicmos InvertersDocument10 paginiBicmos InvertersLily SharmaÎncă nu există evaluări
- Fund PoroDocument97 paginiFund PoroAgustín Ramos LópezÎncă nu există evaluări
- Kata LogDocument48 paginiKata LogsofiakeramikÎncă nu există evaluări
- Fletcher Expanding Tables 2013 v7Document59 paginiFletcher Expanding Tables 2013 v7Silviu Prise100% (1)
- Design CalculationDocument13 paginiDesign CalculationSunil KumarÎncă nu există evaluări
- Unit 1 Vehicle Components - BackDocument20 paginiUnit 1 Vehicle Components - BackCarlos CabreraÎncă nu există evaluări
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveDe la EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveÎncă nu există evaluări
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessDe la EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessÎncă nu există evaluări
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDe la EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindÎncă nu există evaluări
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldDe la EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldEvaluare: 4.5 din 5 stele4.5/5 (55)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepDe la EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepEvaluare: 4.5 din 5 stele4.5/5 (19)
- Generative AI: The Insights You Need from Harvard Business ReviewDe la EverandGenerative AI: The Insights You Need from Harvard Business ReviewEvaluare: 4.5 din 5 stele4.5/5 (2)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesDe la EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesEvaluare: 4.5 din 5 stele4.5/5 (13)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldDe la EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldEvaluare: 4.5 din 5 stele4.5/5 (107)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.De la EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Evaluare: 4 din 5 stele4/5 (15)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)De la EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Evaluare: 4 din 5 stele4/5 (1)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewDe la EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewEvaluare: 4.5 din 5 stele4.5/5 (104)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceDe la EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceEvaluare: 4 din 5 stele4/5 (2)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziDe la Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziÎncă nu există evaluări
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideDe la EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideEvaluare: 5 din 5 stele5/5 (1)
- Artificial Intelligence: A Guide for Thinking HumansDe la EverandArtificial Intelligence: A Guide for Thinking HumansEvaluare: 4.5 din 5 stele4.5/5 (30)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)De la EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)Încă nu există evaluări
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkDe la EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkEvaluare: 4 din 5 stele4/5 (7)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeDe la EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeEvaluare: 4.5 din 5 stele4.5/5 (69)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceDe la EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceEvaluare: 4.5 din 5 stele4.5/5 (38)
- The Digital Mind: How Science is Redefining HumanityDe la EverandThe Digital Mind: How Science is Redefining HumanityEvaluare: 4.5 din 5 stele4.5/5 (2)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsDe la EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsÎncă nu există evaluări