S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Sun Solar System SolutionsDocument8 paginiSun Solar System SolutionsGeorge PapÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- F A (where F is the force applied and A is the cross-sectional area of the δl l l Fl A ΔlDocument3 paginiF A (where F is the force applied and A is the cross-sectional area of the δl l l Fl A ΔlGeorge PapÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- ResultsDocument6 paginiResultsGeorge PapÎncă nu există evaluări
- Radiative Transfer in Astrophysics Theory, Numerical Methods and ApplicationsDocument4 paginiRadiative Transfer in Astrophysics Theory, Numerical Methods and ApplicationsGeorge PapÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Bangladesh Astronomy Olympiad, 2013 (National Round)Document6 paginiBangladesh Astronomy Olympiad, 2013 (National Round)Science Olympiad Blog80% (5)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Universal Marine: Welcome To Our One Stop Marine ServicesDocument8 paginiUniversal Marine: Welcome To Our One Stop Marine Serviceshoangtruongson1111Încă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- 3d Mug Tutorial in 3d MaxDocument5 pagini3d Mug Tutorial in 3d MaxCalvin TejaÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Analisis Dan Perbandingan Jaringan Wifi Dengan Frekuensi 2.4 GHZ Dan 5 GHZ Dengan Metode QosDocument19 paginiAnalisis Dan Perbandingan Jaringan Wifi Dengan Frekuensi 2.4 GHZ Dan 5 GHZ Dengan Metode QosNoltujuh Nollapan (Congyang)Încă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Octopus 900 Instructions For UseDocument18 paginiOctopus 900 Instructions For UseAli FadhilÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Invidis Yearbook 2019Document51 paginiInvidis Yearbook 2019Luis SanchezÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Presentation The New Condominium Rules 9 1 2018 PDFDocument35 paginiPresentation The New Condominium Rules 9 1 2018 PDFYe AungÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Juniper M5 M10 DatasheetDocument6 paginiJuniper M5 M10 DatasheetMohammed Ali ZainÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- County Project Name Cycle Project Address Proj City Proj Zip Applicant/Owner Name HDGP $ Home $ FHTF $ Lihtc9 $ Help $ Oahtc $ Ghap $ HPF $ Lihtc4 $Document60 paginiCounty Project Name Cycle Project Address Proj City Proj Zip Applicant/Owner Name HDGP $ Home $ FHTF $ Lihtc9 $ Help $ Oahtc $ Ghap $ HPF $ Lihtc4 $Mamello PortiaÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Shareholder Agreement 06Document19 paginiShareholder Agreement 06Josmar TelloÎncă nu există evaluări
- Motion To DismissDocument24 paginiMotion To DismisssandyemerÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- 6398 14990 1 PBDocument8 pagini6398 14990 1 PBKent Ky GillaÎncă nu există evaluări
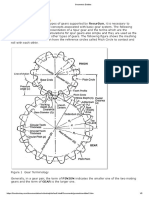
- Geometric Entities: Basic Gear TerminologyDocument5 paginiGeometric Entities: Basic Gear TerminologyMatija RepincÎncă nu există evaluări
- HANA Heroes 1 - EWM Lessons Learned (V2)Document40 paginiHANA Heroes 1 - EWM Lessons Learned (V2)Larissa MaiaÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Performance Ratio Analysis Based On Energy Production For Large-Scale Solar PlantDocument22 paginiPerformance Ratio Analysis Based On Energy Production For Large-Scale Solar PlantPrateek MalhotraÎncă nu există evaluări
- Network Administration and Mikrotik Router ConfigurationDocument17 paginiNetwork Administration and Mikrotik Router ConfigurationbiswasjoyÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Solved Suppose That The Velocity of Circulation of Money Is VDocument1 paginăSolved Suppose That The Velocity of Circulation of Money Is VM Bilal SaleemÎncă nu există evaluări
- Aermod - DRM - Course NotesDocument25 paginiAermod - DRM - Course NotesGhulamMustafaÎncă nu există evaluări
- Importance of Team Work in An OrganizationDocument10 paginiImportance of Team Work in An OrganizationMohammad Sana Ur RabÎncă nu există evaluări
- Raspberry Pi Installing Noobs OSDocument3 paginiRaspberry Pi Installing Noobs OSEXORCEÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- FranchisingDocument38 paginiFranchisingprasadmahajan26100% (1)
- Dominar 400 Spare Parts CatalogueDocument82 paginiDominar 400 Spare Parts CatalogueAkshayaÎncă nu există evaluări
- What Is SAP PS (Project Systems) ModuleDocument3 paginiWhat Is SAP PS (Project Systems) ModuleahmerÎncă nu există evaluări
- Profile Romblon IslandDocument10 paginiProfile Romblon Islandderella starsÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- FinTech RegTech and SupTech - What They Mean For Financial Supervision FINALDocument19 paginiFinTech RegTech and SupTech - What They Mean For Financial Supervision FINALirvandi syahputraÎncă nu există evaluări
- IMO Publication Catalogue List (June 2022)Document17 paginiIMO Publication Catalogue List (June 2022)Seinn NuÎncă nu există evaluări
- Vehicle Detection and Identification Using YOLO in Image ProcessingDocument6 paginiVehicle Detection and Identification Using YOLO in Image ProcessingIJRASETPublicationsÎncă nu există evaluări
- Shell Omala s2 GX 320 TdsDocument2 paginiShell Omala s2 GX 320 TdsOnie Hammamz OylÎncă nu există evaluări
- Title To The ProjectDocument14 paginiTitle To The ProjectJatinChadhaÎncă nu există evaluări
- LIC - Jeevan Labh - Brochure - 9 Inch X 8 Inch - EngDocument13 paginiLIC - Jeevan Labh - Brochure - 9 Inch X 8 Inch - Engnakka_rajeevÎncă nu există evaluări
- CH7Document34 paginiCH7Abdul AzizÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)