S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- hw1 SolutionfluidsDocument3 paginihw1 SolutionfluidsJaime NunezÎncă nu există evaluări
- New Doc 1 PDFDocument4 paginiNew Doc 1 PDFJaime NunezÎncă nu există evaluări
- List of Equations: Equation 1: ResistanceDocument3 paginiList of Equations: Equation 1: ResistanceJaime NunezÎncă nu există evaluări
- Sample HW Report - Spring 2015Document6 paginiSample HW Report - Spring 2015Jaime NunezÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Available at VTU HUB (Android App) : Atme College of Engineering, MysuruDocument32 paginiAvailable at VTU HUB (Android App) : Atme College of Engineering, MysuruRahul Singh PariharÎncă nu există evaluări
- Norma Iso 5630-Parte 3Document12 paginiNorma Iso 5630-Parte 3Nestor Mejia LondoñoÎncă nu există evaluări
- Global Demography: SubtitleDocument32 paginiGlobal Demography: SubtitleEneb De OcampoÎncă nu există evaluări
- CarringtonDocument29 paginiCarringtonTaryn Lee AverittÎncă nu există evaluări
- Driving Collaboration Efqm ModelDocument41 paginiDriving Collaboration Efqm ModelViviane EspositoÎncă nu există evaluări
- The Origins of Genome Complexity: Science December 2003Document6 paginiThe Origins of Genome Complexity: Science December 2003Ramadhan AkmalÎncă nu există evaluări
- MDKA Q3 2023 Activities Report VFFDocument21 paginiMDKA Q3 2023 Activities Report VFFAlvin NiscalÎncă nu există evaluări
- Adorna Tm201 01 Worksheet 1 - ArgDocument2 paginiAdorna Tm201 01 Worksheet 1 - ArgJhay CeeÎncă nu există evaluări
- Cyanobacteria LabDocument6 paginiCyanobacteria LabsenorgustoÎncă nu există evaluări
- Fractions and Ratios Lesson PlanDocument2 paginiFractions and Ratios Lesson Planapi-711296752Încă nu există evaluări
- Scary Story EssayDocument8 paginiScary Story Essayymmrexwhd100% (2)
- Question Paper Code:: (10 2 20 Marks)Document3 paginiQuestion Paper Code:: (10 2 20 Marks)methilaÎncă nu există evaluări
- Coc Sanitary PlumbingDocument1 paginăCoc Sanitary Plumbingrolando dionisioÎncă nu există evaluări
- 01 Plant Design and Economics IntroductionDocument32 pagini01 Plant Design and Economics Introductionهادی طاهریÎncă nu există evaluări
- Learning Activity Sheet 2 Principles of Radio Broadcasting: Background Information For LearnersDocument3 paginiLearning Activity Sheet 2 Principles of Radio Broadcasting: Background Information For LearnersYuta's HousewifeÎncă nu există evaluări
- Project 2020 1 IT02 KA229 079474Document3 paginiProject 2020 1 IT02 KA229 079474RECAİ TAŞÎncă nu există evaluări
- Micro-Climate ReportDocument10 paginiMicro-Climate Reportaadya agrawalÎncă nu există evaluări
- Net Zero Strategy BeisDocument368 paginiNet Zero Strategy Beis蔡孟軒Încă nu există evaluări
- Intllbe Calondi) R For DSSBB Elani - Durlnfl Yai (MZZDocument4 paginiIntllbe Calondi) R For DSSBB Elani - Durlnfl Yai (MZZanirudh yadavÎncă nu există evaluări
- At Oxyrhynchus: Mary BeardDocument36 paginiAt Oxyrhynchus: Mary BeardsalisoftÎncă nu există evaluări
- Biaxial Bending of Steel Angle Section PDFDocument3 paginiBiaxial Bending of Steel Angle Section PDFImam NakhrowiÎncă nu există evaluări
- UK BIM Alliance, BSI & CDBB Launch UK BIM FrameworkDocument2 paginiUK BIM Alliance, BSI & CDBB Launch UK BIM FrameworkInuyashahanÎncă nu există evaluări
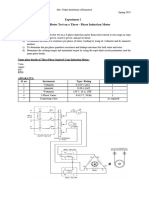
- Exp-2 - Blocked-Rotor Test On A Three-Phase IMDocument3 paginiExp-2 - Blocked-Rotor Test On A Three-Phase IMMudit BhatiaÎncă nu există evaluări
- The Impact of Brands On Consumer PurchasDocument6 paginiThe Impact of Brands On Consumer PurchasKovai MTÎncă nu există evaluări
- American Accounting AssociationDocument13 paginiAmerican Accounting AssociationRahmat Pasaribu OfficialÎncă nu există evaluări
- Preservation of Indigenous Culture of Bataan Through An Ayta Magbukon School of Living Tradition (SLT) ProgramDocument11 paginiPreservation of Indigenous Culture of Bataan Through An Ayta Magbukon School of Living Tradition (SLT) ProgramEuniz ReyesÎncă nu există evaluări
- Introduction To PhonologyDocument8 paginiIntroduction To PhonologyJunjet FamorcanÎncă nu există evaluări
- Legaledge Test Series: Mock Common Law Admission Test 2024 Mock Clat - 03Document40 paginiLegaledge Test Series: Mock Common Law Admission Test 2024 Mock Clat - 03Ashutosh MalviyaÎncă nu există evaluări
- Determinant and OtherDocument9 paginiDeterminant and Otherpema karmoÎncă nu există evaluări
- Faculty of Engineering Technology Civil Engineering Department Soil LaboratoryDocument11 paginiFaculty of Engineering Technology Civil Engineering Department Soil LaboratoryAnas Abu-shawishÎncă nu există evaluări