S-ar putea să vă placă și
- Devoir de Synthèse N°1 - Génie Électrique Four de Traitement - Bac Technique (2015-2016) MR Abdallah RaouafiDocument4 paginiDevoir de Synthèse N°1 - Génie Électrique Four de Traitement - Bac Technique (2015-2016) MR Abdallah RaouafiFethi BenmassoudeÎncă nu există evaluări
- Serie MCCDocument7 paginiSerie MCCrzougarzougaÎncă nu există evaluări
- Devoir de Synthèse N°3 - Génie Électrique Système Cadreuse Automatique - Bac Technique (2010-2011) MR Raouafi Abdallah PDFDocument4 paginiDevoir de Synthèse N°3 - Génie Électrique Système Cadreuse Automatique - Bac Technique (2010-2011) MR Raouafi Abdallah PDFFedi Berjeb0% (1)
- Corrige Technique 2014Document95 paginiCorrige Technique 2014Mohamed100% (1)
- Devoir de Synthèse N°1 - Génie Électrique - Bac Technique (2011-2012) MR Raouafi AbdallahDocument4 paginiDevoir de Synthèse N°1 - Génie Électrique - Bac Technique (2011-2012) MR Raouafi AbdallahFethi BenmassoudeÎncă nu există evaluări
- DC14ST2008 Enonce Corrige PDFDocument8 paginiDC14ST2008 Enonce Corrige PDFnermin brahmiÎncă nu există evaluări
- Serie1 Combinatoire 2022 2023Document13 paginiSerie1 Combinatoire 2022 2023Fares BouzidiÎncă nu există evaluări
- Devoir de Contrôle N°1 - Génie Électrique - Bac Technique (2010-2011) MR Abdallah Raouafi PDFDocument4 paginiDevoir de Contrôle N°1 - Génie Électrique - Bac Technique (2010-2011) MR Abdallah Raouafi PDFWassim Ben Mechlia0% (1)
- 03 Exercice n03 SujetDocument4 pagini03 Exercice n03 SujetMohamed aziz ben sassiÎncă nu există evaluări
- Série N - 6 Ali 2015 FinaleDocument14 paginiSérie N - 6 Ali 2015 FinaleHichem HamdiÎncă nu există evaluări
- Microcontroleur 4tech 2016 2017suiteDocument11 paginiMicrocontroleur 4tech 2016 2017suitebasmaÎncă nu există evaluări
- Devoir de Synthèse N°2 - Ligne Automatisee de Production de Pains - Bac Technique (2019-2020) MR Ben Aouicha MohamedDocument10 paginiDevoir de Synthèse N°2 - Ligne Automatisee de Production de Pains - Bac Technique (2019-2020) MR Ben Aouicha MohamedKhalil BkekriÎncă nu există evaluări
- Activites Microcontroleur 16f84aDocument8 paginiActivites Microcontroleur 16f84aHichem HamdiÎncă nu există evaluări
- Application 3 Moto Compresseur D Air A Piston PDFDocument10 paginiApplication 3 Moto Compresseur D Air A Piston PDFHajar NhailaÎncă nu există evaluări
- Devoir À RendreDocument2 paginiDevoir À RendreElias AzoumÎncă nu există evaluări
- Devoir 3 Si 2 Bac STM Tri de CaisseDocument11 paginiDevoir 3 Si 2 Bac STM Tri de CaisseHajar Ben GaraâÎncă nu există evaluări
- TD Mat Gui 5.1 Tsi1 Tsi2Document5 paginiTD Mat Gui 5.1 Tsi1 Tsi2Adrien LupinÎncă nu există evaluări
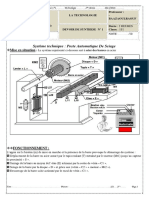
- Devoir de Synthèse N°1 - Génie Électrique Système de Triage Automatique - 3ème Technique (2011-2012) MR Abdallah RaouafiDocument4 paginiDevoir de Synthèse N°1 - Génie Électrique Système de Triage Automatique - 3ème Technique (2011-2012) MR Abdallah Raouafiibrahim abdelaliÎncă nu există evaluări
- Devoir de Synthèse N°1 - Génie Électrique Tri de Boitiers - Bac Technique (2014-2015) MR YagoubiDocument8 paginiDevoir de Synthèse N°1 - Génie Électrique Tri de Boitiers - Bac Technique (2014-2015) MR YagoubiFethi BenmassoudeÎncă nu există evaluări
- Application Des PreactionneursDocument6 paginiApplication Des Preactionneursdxsszsz100% (1)
- A22-Opérations D'arithmétique Binaire - v19 - 2Document6 paginiA22-Opérations D'arithmétique Binaire - v19 - 2Rafik Ben AmorÎncă nu există evaluări
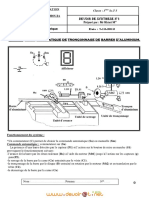
- Devoir de Synthèse N°1 - Technologie - 3ème Technique (2010-2011) MR Abdallah RaouafiDocument4 paginiDevoir de Synthèse N°1 - Technologie - 3ème Technique (2010-2011) MR Abdallah RaouafiOthman TmarÎncă nu există evaluări
- TP 1 RegistreDocument4 paginiTP 1 Registrellahn64Încă nu există evaluări
- Épreuve de Synthèse D'automatique 2002-2003Document7 paginiÉpreuve de Synthèse D'automatique 2002-2003Nourallah AouinaÎncă nu există evaluări
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document5 paginiDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Piere EbrahimÎncă nu există evaluări
- Génie Électrique Compteur Sunchrone 2012 2013 (Aiissa)Document13 paginiGénie Électrique Compteur Sunchrone 2012 2013 (Aiissa)nicegtoÎncă nu există evaluări
- Partie Genie Electrique: Nom: ... Prénom: . . N°: . . 4STDocument4 paginiPartie Genie Electrique: Nom: ... Prénom: . . N°: . . 4STHakim SaidiÎncă nu există evaluări
- Ex 3 2steDocument4 paginiEx 3 2steHicham MarzouqÎncă nu există evaluări
- Devoir de Synthèse N°1 2012 2013 (Dhahri Salah)Document6 paginiDevoir de Synthèse N°1 2012 2013 (Dhahri Salah)Youssef CherniÎncă nu există evaluări
- DPDocument5 paginiDPLASSOUEDÎncă nu există evaluări
- Machine de Debitage de CeinturesDocument14 paginiMachine de Debitage de CeinturesGuiliass100% (1)
- Devoir de Controle N°3: - Génie ÉlectriqueDocument4 paginiDevoir de Controle N°3: - Génie ÉlectriqueQuincaillerie Ben MansourÎncă nu există evaluări
- 1-Circuit Intégré: 74XX83:: Document Constructeur Des Circuits Intégrés Utilisés Dans Carte de CommandeDocument3 pagini1-Circuit Intégré: 74XX83:: Document Constructeur Des Circuits Intégrés Utilisés Dans Carte de CommandeHakim SaidiÎncă nu există evaluări
- 2 MCC 1 PDFDocument10 pagini2 MCC 1 PDFمفتاح الدينÎncă nu există evaluări
- Datasheet 74162-74163Document4 paginiDatasheet 74162-74163Azer HammamiÎncă nu există evaluări
- Auto - 1 - 2023 OkDocument8 paginiAuto - 1 - 2023 OkfjosephfabriceÎncă nu există evaluări
- dcn1 2020 3t2 Pince CorrectionDocument4 paginidcn1 2020 3t2 Pince CorrectionGuiliassÎncă nu există evaluări
- DS1 2021-DTDocument6 paginiDS1 2021-DTramziÎncă nu există evaluări
- Etude de Systeme Electrique - BTS Blanc N°1 - Misp - 2022 - 2023Document13 paginiEtude de Systeme Electrique - BTS Blanc N°1 - Misp - 2022 - 2023Abi ClémentÎncă nu există evaluări
- Série D'exercices N°10 - Génie Électrique - Microcontrôleurs - Bac Technique (2015-2016) MR Raouafi AbdallahDocument8 paginiSérie D'exercices N°10 - Génie Électrique - Microcontrôleurs - Bac Technique (2015-2016) MR Raouafi AbdallahZak MtcmÎncă nu există evaluări
- Devoir de Contrôle N°1 Génie Mécanique Machine de Production Du Cafe Chaud 2018 2019 (Dhifaoui Abdelwaheb)Document6 paginiDevoir de Contrôle N°1 Génie Mécanique Machine de Production Du Cafe Chaud 2018 2019 (Dhifaoui Abdelwaheb)كريمة نصيبÎncă nu există evaluări
- DT Sujet DS3 2023MDocument6 paginiDT Sujet DS3 2023MBouabdellaoui saif ennasrÎncă nu există evaluări
- Devoir de Controle N1Document4 paginiDevoir de Controle N1sarah09112008Încă nu există evaluări
- Devoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariDocument5 paginiDevoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariAbidi NawresÎncă nu există evaluări
- Fin de Formation - Synthése ESA 2022 (TEST3) - 1Document6 paginiFin de Formation - Synthése ESA 2022 (TEST3) - 1otmane touilÎncă nu există evaluări
- Transformtion 2021Document4 paginiTransformtion 2021Zair HafnaouiÎncă nu există evaluări
- Devoir de Synthèse N°3 2010 2011 (Ben Abdallah Marouan) PDFDocument16 paginiDevoir de Synthèse N°3 2010 2011 (Ben Abdallah Marouan) PDFmohamed1101Încă nu există evaluări
- Amcns-Devoir de Maison 2eme Tr3 CorrigerDocument16 paginiAmcns-Devoir de Maison 2eme Tr3 Corrigersaded05Încă nu există evaluări
- Seie 4 Grafcet 3emeDocument3 paginiSeie 4 Grafcet 3emeSoumeya MachtaÎncă nu există evaluări
- ATC ExercicesDocument42 paginiATC ExerciceskhamissbenzÎncă nu există evaluări
- Correction Ds1 Systeme Automatise de Marquage de BoitesDocument4 paginiCorrection Ds1 Systeme Automatise de Marquage de BoitesAlami ElÎncă nu există evaluări
- Devoir de Synthèse N°1 2015 2016 (MR Baazaoui Abderraouf)Document5 paginiDevoir de Synthèse N°1 2015 2016 (MR Baazaoui Abderraouf)Ahlem Rmida Ben HmidaÎncă nu există evaluări
- Devoir de Contrôle N°1 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFI 2 PDFDocument4 paginiDevoir de Contrôle N°1 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFI 2 PDFMayouMohAmed100% (1)
- Dossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsDocument3 paginiDossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsMortadha RabahÎncă nu există evaluări
- Manuel D'activitéDocument192 paginiManuel D'activitéfehmi001100% (1)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesDe la EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesÎncă nu există evaluări
- D Reponse Session Pricipale2014Document4 paginiD Reponse Session Pricipale2014Ghassen WedÎncă nu există evaluări
- Ds2 4017 FFDocument4 paginiDs2 4017 FFHakim SaidiÎncă nu există evaluări
- Exercice MLI+LCDDocument5 paginiExercice MLI+LCDArfaoui AymenÎncă nu există evaluări
- FD13 - Test Prérequis - Distribution-Technicien Lignes MT&BT - (5-6 - )Document4 paginiFD13 - Test Prérequis - Distribution-Technicien Lignes MT&BT - (5-6 - )bouamoud4Încă nu există evaluări
- Corrige Examen Fpga 2012 2013Document6 paginiCorrige Examen Fpga 2012 2013amidi5555913100% (2)
- Maquette Régime de NeutreDocument14 paginiMaquette Régime de NeutreHichem Hamdi50% (2)
- CTIA04 - Programmation Des Automates S7-300 - Opérations NumériquesDocument7 paginiCTIA04 - Programmation Des Automates S7-300 - Opérations Numériquesyassine123Încă nu există evaluări
- TP Commande Séquentielle D'ascenseurDocument10 paginiTP Commande Séquentielle D'ascenseurHichem HamdiÎncă nu există evaluări
- Upload - Série D'exercices N°9-MAS 3 PDFDocument5 paginiUpload - Série D'exercices N°9-MAS 3 PDFHichem HamdiÎncă nu există evaluări
- Dossier ChariotDocument38 paginiDossier ChariotHichem HamdiÎncă nu există evaluări
- TPDocument6 paginiTPHichem HamdiÎncă nu există evaluări
- Fascicule de TP FpgaDocument32 paginiFascicule de TP FpgaHichem HamdiÎncă nu există evaluări
- Initiation A LabVIEW GOPDocument23 paginiInitiation A LabVIEW GOPbobyys990Încă nu există evaluări
- BatterieDocument51 paginiBatterieHichem HamdiÎncă nu există evaluări
- Serie MATDocument6 paginiSerie MATHichem HamdiÎncă nu există evaluări
- 04 01 Fiche Efficacite Energetique VD 1Document5 pagini04 01 Fiche Efficacite Energetique VD 1Hichem HamdiÎncă nu există evaluări
- CHAPITREIIIDocument23 paginiCHAPITREIIIHichem HamdiÎncă nu există evaluări
- Electronique de Puissance L2 S2Document74 paginiElectronique de Puissance L2 S2Auzlem Faouzi100% (1)
- Neural Expert and Neuro Fuzzy - 11Document46 paginiNeural Expert and Neuro Fuzzy - 11Hichem HamdiÎncă nu există evaluări
- ChaineFonctionnelle Cours ProfDocument3 paginiChaineFonctionnelle Cours ProfHichem HamdiÎncă nu există evaluări
- Ing Asma Ben AmarDocument121 paginiIng Asma Ben AmarHichem Hamdi100% (1)
- Inj Chiter LamriDocument79 paginiInj Chiter LamriHichem HamdiÎncă nu există evaluări
- Correction Installation Photovoltaique Autonome EE2 3 2Document14 paginiCorrection Installation Photovoltaique Autonome EE2 3 2Hichem Hamdi100% (1)
- Upload - Résumé Du Cours-MCC Et Hacheur-2014-2015Document4 paginiUpload - Résumé Du Cours-MCC Et Hacheur-2014-2015Hichem Hamdi100% (3)
- La Thermique Du Batiment en 37 Fiches-OutilsDocument327 paginiLa Thermique Du Batiment en 37 Fiches-OutilsHichem Hamdi100% (3)
- m01.00 - Chambre Froide NegativeDocument71 paginim01.00 - Chambre Froide NegativeHichem HamdiÎncă nu există evaluări
- 3Document1 pagină3Hichem HamdiÎncă nu există evaluări
- Archimat 2Document68 paginiArchimat 2Hichem HamdiÎncă nu există evaluări
- Feuille TageDocument30 paginiFeuille TageHichem HamdiÎncă nu există evaluări
- Archimat 2Document68 paginiArchimat 2Hichem HamdiÎncă nu există evaluări
- 2Document6 pagini2Hichem HamdiÎncă nu există evaluări
- Exercices Etude Dune Installation Solaire PhotovoltaïqueDocument3 paginiExercices Etude Dune Installation Solaire PhotovoltaïqueHichem HamdiÎncă nu există evaluări
- TD A21 Formes Energie PDFDocument2 paginiTD A21 Formes Energie PDFHichem HamdiÎncă nu există evaluări
- Capteur Raccordement AutomateDocument5 paginiCapteur Raccordement AutomateDOUDOU-38Încă nu există evaluări
- QualitéDocument10 paginiQualitéDorra Ben SaadÎncă nu există evaluări
- CHAPITRE 3 InterfacesRadioHKoubaaDocument53 paginiCHAPITRE 3 InterfacesRadioHKoubaaameni MhamdyÎncă nu există evaluări
- Rapport Metier Et Formation YounesDocument12 paginiRapport Metier Et Formation Younesyounesrock14_927633044% (16)
- Cours ReseauxDocument189 paginiCours ReseauxMustapha ErrafyqÎncă nu există evaluări
- Cours HTMLDocument59 paginiCours HTMLEssamiÎncă nu există evaluări
- Atelier OWASPDocument2 paginiAtelier OWASPOusmane PENEÎncă nu există evaluări
- Cours Matlab FIDocument68 paginiCours Matlab FIing_taharÎncă nu există evaluări
- Cisco Discovery Module 2 v4Document5 paginiCisco Discovery Module 2 v4ALI JedidiÎncă nu există evaluări
- Altivar Process ATV900 - ATV960C35Q4X1Document5 paginiAltivar Process ATV900 - ATV960C35Q4X1Hous SamÎncă nu există evaluări
- 7-TCP Et UDP CORRIGEDocument4 pagini7-TCP Et UDP CORRIGEAmira Skander100% (1)
- 0045 Cours Reseaux Transmission Sans FilDocument32 pagini0045 Cours Reseaux Transmission Sans FilWided AhmadiÎncă nu există evaluări
- TD-TP N° 5: Exercice 1Document2 paginiTD-TP N° 5: Exercice 1ر' حيلÎncă nu există evaluări
- Elaboration D'un Programme de Distribution de GPLc. Au Niveau de L'entreprise NAFTAL de Béjaia PDFDocument86 paginiElaboration D'un Programme de Distribution de GPLc. Au Niveau de L'entreprise NAFTAL de Béjaia PDFMessaoud Medroua0% (1)
- Eléments de Base Du Langage JavaDocument10 paginiEléments de Base Du Langage JavazakiÎncă nu există evaluări
- Devoir de Contrôle N°1 2011 2012 (Sami)Document2 paginiDevoir de Contrôle N°1 2011 2012 (Sami)housseineÎncă nu există evaluări
- TP1 Mes Premiers Pas Pour Mes Programmes HTML-2018Document2 paginiTP1 Mes Premiers Pas Pour Mes Programmes HTML-2018Mohamed MahjoubÎncă nu există evaluări
- Yoruba Dictionary PDFDocument458 paginiYoruba Dictionary PDFJosé Alberto Alves Fonseca50% (2)
- Loi Alpha StableDocument13 paginiLoi Alpha StablejhdmssÎncă nu există evaluări
- 3°AS - Séq.1-Convaincre Et Persuader - (Débat D'idées) - 23-24Document24 pagini3°AS - Séq.1-Convaincre Et Persuader - (Débat D'idées) - 23-24Yacine TammaÎncă nu există evaluări
- Les CapteursDocument10 paginiLes CapteursHoussine LimounyÎncă nu există evaluări
- Polar F4Document26 paginiPolar F4Damien GribosÎncă nu există evaluări
- tp4 HbaseDocument18 paginitp4 HbaseaimeÎncă nu există evaluări
- 2 Guide Télépaiement Acompte PRofDocument13 pagini2 Guide Télépaiement Acompte PRofhakim fayçalÎncă nu există evaluări
- Devoir de Contrôle #2 - Informatique PowerPoint - 8ème (2008-2009)Document2 paginiDevoir de Contrôle #2 - Informatique PowerPoint - 8ème (2008-2009)arab teba100% (1)
- Codagemahseurv 10Document26 paginiCodagemahseurv 10nani ninouÎncă nu există evaluări
- Etude Comparative BLR LSF Ipsec VPN PDF 3Document3 paginiEtude Comparative BLR LSF Ipsec VPN PDF 3MilliardaireVi KpésséÎncă nu există evaluări
- All TPDocument125 paginiAll TPOMAR RAHALIÎncă nu există evaluări
- Chap1Notions Sur La Transmission de Donn Es H.louazene Mode de CompatibilitDocument27 paginiChap1Notions Sur La Transmission de Donn Es H.louazene Mode de CompatibilitNouzha BoukoubaÎncă nu există evaluări
- Intelligence Économique s9Document13 paginiIntelligence Économique s9Kaoutar ChaanounÎncă nu există evaluări
- Initiationtableur 5 EmeDocument1 paginăInitiationtableur 5 EmeAnonymous 1BuyZjZÎncă nu există evaluări