S-ar putea să vă placă și
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsDe la EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsÎncă nu există evaluări
- Advanced Gas Metal Arc Welding ProcDocument20 paginiAdvanced Gas Metal Arc Welding ProcjavadmohammadiÎncă nu există evaluări
- MRT-10-2 Arc Welding Principle and SSWDocument27 paginiMRT-10-2 Arc Welding Principle and SSW1026Aniket TankÎncă nu există evaluări
- Cigweld-Deposited Rates PDFDocument7 paginiCigweld-Deposited Rates PDFNam_HitechÎncă nu există evaluări
- Gmaw Thumb RuleDocument68 paginiGmaw Thumb Rule0502raviÎncă nu există evaluări
- Welding Low Alloy SteelsDocument14 paginiWelding Low Alloy SteelsNanda Al Alif100% (1)
- Product Reference Manual - Section 8 - Arc Equipment & ProcessesDocument33 paginiProduct Reference Manual - Section 8 - Arc Equipment & Processesnishant361Încă nu există evaluări
- Pipe WeldingDocument6 paginiPipe Weldingyohanes_pamungkas_2Încă nu există evaluări
- Group 8, Welding AssignmentDocument11 paginiGroup 8, Welding AssignmentKavish ChandraÎncă nu există evaluări
- GMAWDocument42 paginiGMAWMuhammed SulfeekÎncă nu există evaluări
- Gmaw PDFDocument34 paginiGmaw PDFGnanasekaran MÎncă nu există evaluări
- Mixing Time Jet MixerDocument9 paginiMixing Time Jet MixerLTE002Încă nu există evaluări
- MIG Welding ProcessDocument12 paginiMIG Welding ProcessHimanshu RaoÎncă nu există evaluări
- Chapter9 GMAW FCAW WeldingDocument17 paginiChapter9 GMAW FCAW Weldingrusf123Încă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesÎncă nu există evaluări
- GMAW FundamentalsDocument18 paginiGMAW FundamentalsYusup MulyanaÎncă nu există evaluări
- Gmaw & Fcaw-MsmeDocument73 paginiGmaw & Fcaw-MsmemilindÎncă nu există evaluări
- Lab Report On Robotic WeldingDocument8 paginiLab Report On Robotic WeldingSanatan ChoudhuryÎncă nu există evaluări
- Gas Metal Arc Welding (GMAW)Document6 paginiGas Metal Arc Welding (GMAW)AimanRahim100% (2)
- Development of An Automatic Arc Welding System Using Smaw ProcessDocument7 paginiDevelopment of An Automatic Arc Welding System Using Smaw ProcessapoiÎncă nu există evaluări
- A Study On Effect of Various Process Variables in Gas Metal Arc WeldingDocument8 paginiA Study On Effect of Various Process Variables in Gas Metal Arc WeldingAnonymous lPvvgiQjRÎncă nu există evaluări
- Modeling of MIG MAG Welding With Experimental Validation - 2010 - Applied MathemDocument17 paginiModeling of MIG MAG Welding With Experimental Validation - 2010 - Applied MathemPaulÎncă nu există evaluări
- Welding ProcessesDocument12 paginiWelding ProcessesMadhurimaMitraÎncă nu există evaluări
- GMAW 2007 Welding JournalDocument33 paginiGMAW 2007 Welding JournaledyÎncă nu există evaluări
- (Gmaw) Gas Metal Arc Welding (Mig - Mag)Document11 pagini(Gmaw) Gas Metal Arc Welding (Mig - Mag)buttuverma18102Încă nu există evaluări
- Effect of Welding Current On Metal Transfer in GMAW: Archives of Materials Science and EngineeringDocument8 paginiEffect of Welding Current On Metal Transfer in GMAW: Archives of Materials Science and EngineeringRajaganapathy GanaÎncă nu există evaluări
- GMAWDocument7 paginiGMAWmostafaÎncă nu există evaluări
- New Microsoft Word DocumentDocument6 paginiNew Microsoft Word DocumentSanket KareÎncă nu există evaluări
- Constant Current vs. Constant Voltage Output - Lincoln ElectricDocument5 paginiConstant Current vs. Constant Voltage Output - Lincoln ElectricgobiÎncă nu există evaluări
- Course: Advanced Manufacturing Processes Module No. 4: Advanced Welding ProcessesDocument10 paginiCourse: Advanced Manufacturing Processes Module No. 4: Advanced Welding Processesjanakiram2010Încă nu există evaluări
- Metal Inert Gas WeldingDocument4 paginiMetal Inert Gas WeldingINfo WTCSÎncă nu există evaluări
- Q II Module 5 GR 12 Week5Document23 paginiQ II Module 5 GR 12 Week5WilmerÎncă nu există evaluări
- WWW - Kobelco.co - JP English Welding Events Files 2011GMAWDocument33 paginiWWW - Kobelco.co - JP English Welding Events Files 2011GMAWMaulana Mufti MuhammadÎncă nu există evaluări
- Construction of A Short Circuit Frequency Map To Define Gmaw-S Parameters During Wpss DevelopmentDocument9 paginiConstruction of A Short Circuit Frequency Map To Define Gmaw-S Parameters During Wpss DevelopmentWilliam torresÎncă nu există evaluări
- Mag Welding - Sudura PerfectaDocument39 paginiMag Welding - Sudura PerfectaUrszuj CsabaÎncă nu există evaluări
- T 34Document14 paginiT 34kaliappan45490Încă nu există evaluări
- 1.8.1 - MIG - MAG WeldingDocument88 pagini1.8.1 - MIG - MAG WeldingReza DhonyÎncă nu există evaluări
- 77 (Migmag) - Metal TransferDocument1 pagină77 (Migmag) - Metal Transferjose alberto gamiñoÎncă nu există evaluări
- Gtaw and Gmaw Equipment and Supplies: 7.2 Arc Welding Power Sources For GTAWDocument19 paginiGtaw and Gmaw Equipment and Supplies: 7.2 Arc Welding Power Sources For GTAWNachiket MujumdarÎncă nu există evaluări
- 3.4 Arc Length: The Distance From The Tip of The WeldingDocument7 pagini3.4 Arc Length: The Distance From The Tip of The WeldingMohammed IlliasuddinÎncă nu există evaluări
- Design of Resistance Spot Welding System Using Integral Switching Cycle Control TechniqueDocument6 paginiDesign of Resistance Spot Welding System Using Integral Switching Cycle Control TechniqueRahul SharmaÎncă nu există evaluări
- Gas Metal Arc Welding - PulseDocument68 paginiGas Metal Arc Welding - Pulsegreatsteel100% (1)
- Ilhar Ul Hassan PDFDocument8 paginiIlhar Ul Hassan PDFsanchita_abrol1483Încă nu există evaluări
- How To Mig WeldDocument26 paginiHow To Mig WeldErick HoganÎncă nu există evaluări
- Modeling and Intelligent Control of A Robotic Gas Metal Arc Welding SystemDocument19 paginiModeling and Intelligent Control of A Robotic Gas Metal Arc Welding SystemKabil RajÎncă nu există evaluări
- And Welding in Manufacturing: TIG MIGDocument27 paginiAnd Welding in Manufacturing: TIG MIGHope ThemÎncă nu există evaluări
- Metrode Duplex Welding EWDDocument7 paginiMetrode Duplex Welding EWDClaudia MmsÎncă nu există evaluări
- Experimental Investigation On The Effects of ProceDocument17 paginiExperimental Investigation On The Effects of ProceHussain AlsaadyÎncă nu există evaluări
- New Sensor LessDocument10 paginiNew Sensor LessAbhishek AgarwalÎncă nu există evaluări
- 2015l - Influência de Procedimentos e Modos de Transferência Na Soldagem Mag Na Redução de Deformações em Painéis de Estrutura MarítimaDocument10 pagini2015l - Influência de Procedimentos e Modos de Transferência Na Soldagem Mag Na Redução de Deformações em Painéis de Estrutura MarítimaIgor Alexsander Barbosa MagnoÎncă nu există evaluări
- Essential Factor in GMAWDocument33 paginiEssential Factor in GMAWlara_rajkumar667Încă nu există evaluări
- Advancements in Pulse Gas Metal Arc WeldingDocument8 paginiAdvancements in Pulse Gas Metal Arc Weldingabraham silva hernandezÎncă nu există evaluări
- Article - Innovation in The MIG-MAG Process - Productivity Analysis and Fume EmissionsDocument10 paginiArticle - Innovation in The MIG-MAG Process - Productivity Analysis and Fume EmissionsRania TrimechÎncă nu există evaluări
- 2015 Kobelco GmawDocument33 pagini2015 Kobelco GmawAhmed HashimÎncă nu există evaluări
- Welding Procedure & Welder Qualification: Pak-Arab Refinery LimitedDocument70 paginiWelding Procedure & Welder Qualification: Pak-Arab Refinery LimitedRizwan BangashÎncă nu există evaluări
- Amm 813-814 456Document7 paginiAmm 813-814 456Pandian PitchipooÎncă nu există evaluări
- Tapchanger Dual Assessment Raka Levi31102011 PDFDocument12 paginiTapchanger Dual Assessment Raka Levi31102011 PDFYuri OmonteÎncă nu există evaluări
- 1.1 Introduction To GmawDocument43 pagini1.1 Introduction To GmawNaveenprakashÎncă nu există evaluări
- How to prepare Welding Procedures for Oil & Gas PipelinesDe la EverandHow to prepare Welding Procedures for Oil & Gas PipelinesEvaluare: 5 din 5 stele5/5 (1)
- Power Systems-On-Chip: Practical Aspects of DesignDe la EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardÎncă nu există evaluări
- CH340G USB To UART Interface DatasheetDocument2 paginiCH340G USB To UART Interface DatasheetDavid MoodyÎncă nu există evaluări
- CH340G USB To UART Interface DatasheetDocument3 paginiCH340G USB To UART Interface DatasheetDavid MoodyÎncă nu există evaluări
- ch340g Part 3Document3 paginich340g Part 3David MoodyÎncă nu există evaluări
- stm32f407vg Part3Document7 paginistm32f407vg Part3David MoodyÎncă nu există evaluări
- stm32f407vg Part2Document15 paginistm32f407vg Part2David MoodyÎncă nu există evaluări
- stm32f407vg Part1Document30 paginistm32f407vg Part1David MoodyÎncă nu există evaluări
- APT150GN60JDQ4 Typical Performance CurvesDocument9 paginiAPT150GN60JDQ4 Typical Performance CurvesDavid MoodyÎncă nu există evaluări
- Create Triton RMP MapsDocument7 paginiCreate Triton RMP MapsDavid MoodyÎncă nu există evaluări
- IAR Workbench SettingsDocument26 paginiIAR Workbench SettingsDavid Moody100% (1)
- lsd815 65 XX PFDocument9 paginilsd815 65 XX PFDavid MoodyÎncă nu există evaluări
- Bulletin Self-Clinching NutsDocument12 paginiBulletin Self-Clinching NutsDavid MoodyÎncă nu există evaluări
- An Introduction To Numerical Methods For The Solutions of Partial Differential EquationsDocument12 paginiAn Introduction To Numerical Methods For The Solutions of Partial Differential EquationseiroÎncă nu există evaluări
- Charlotte Perriand - From Photography To Design - de La Photographie Au DesignDocument3 paginiCharlotte Perriand - From Photography To Design - de La Photographie Au DesignCamille BinzÎncă nu există evaluări
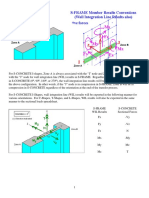
- Wall Integration Conventions S-CONCRETE R11 S-FRAMEDocument3 paginiWall Integration Conventions S-CONCRETE R11 S-FRAMESyed RaziuddinÎncă nu există evaluări
- B Splines 04 PDFDocument16 paginiB Splines 04 PDFShawn PetersenÎncă nu există evaluări
- Atoms Molecules and IonsDocument78 paginiAtoms Molecules and IonszulqarnainkhaliqÎncă nu există evaluări
- 8.6C PosttestDocument2 pagini8.6C PosttestYohanes RatnodiyantoÎncă nu există evaluări
- TSL250R, TSL251R, TSL252R: Light-to-Voltage Optical SensorsDocument21 paginiTSL250R, TSL251R, TSL252R: Light-to-Voltage Optical Sensorsthevincenzo@gmail.comÎncă nu există evaluări
- Altitude Correction FactorsDocument6 paginiAltitude Correction Factorscarlos.calderonÎncă nu există evaluări
- Failure Analysis of Malin LandslideDocument16 paginiFailure Analysis of Malin LandslideAnonymous GnfGTwÎncă nu există evaluări
- Shear Waves 2Document14 paginiShear Waves 2GEOMAHESHÎncă nu există evaluări
- Experiment No. 1Document12 paginiExperiment No. 1KennethÎncă nu există evaluări
- Basf Masterseal 912 Tds PDFDocument2 paginiBasf Masterseal 912 Tds PDFDhananjay ShindeÎncă nu există evaluări
- ME 41 SyllabusDocument1 paginăME 41 SyllabusElisha TanÎncă nu există evaluări
- Lab Report 1Document26 paginiLab Report 1ParvinÎncă nu există evaluări
- Lesson Plan Science Level 7Document58 paginiLesson Plan Science Level 7aries triwidajati100% (4)
- Light and Shadow Quiz NameDocument4 paginiLight and Shadow Quiz Nameapi-490528795100% (1)
- CV AkhyarDocument31 paginiCV AkhyarNaveed UR RehmanÎncă nu există evaluări
- Thomson BSA Grease BrochureDocument1 paginăThomson BSA Grease BrochureElectromateÎncă nu există evaluări
- Chapter 7 - Quantization Noise in DSPDocument31 paginiChapter 7 - Quantization Noise in DSPSarah KumakoÎncă nu există evaluări
- Maxwell-Boltzmann DistributionDocument8 paginiMaxwell-Boltzmann DistributionlamyantingÎncă nu există evaluări
- SeasonswebquestDocument2 paginiSeasonswebquestapi-264590160Încă nu există evaluări
- PhysicsDocument396 paginiPhysicsGreeny34Încă nu există evaluări
- Acomodacion y VergenciasDocument1 paginăAcomodacion y VergenciasJeferson Alexander Pabon RodriguezÎncă nu există evaluări
- 1 B 960 ADocument3 pagini1 B 960 AECEOCETÎncă nu există evaluări
- Buffer SelectionDocument3 paginiBuffer SelectionSandeep KumarÎncă nu există evaluări
- Soil Test SidipurDocument22 paginiSoil Test SidipurRajib MaharjanÎncă nu există evaluări
- Rotational Motion Paper-2Document2 paginiRotational Motion Paper-2rkjha708Încă nu există evaluări
- Large Eddy Simulation of Channel Flow Using Wall FunctionsDocument46 paginiLarge Eddy Simulation of Channel Flow Using Wall FunctionsKian ChuanÎncă nu există evaluări
- DEFUZZDocument43 paginiDEFUZZsunilkumareceÎncă nu există evaluări