S-ar putea să vă placă și
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe la EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoEvaluare: 4 din 5 stele4/5 (4)
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De la EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Evaluare: 1 din 5 stele1/5 (2)
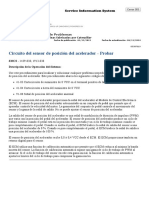
- Circuito Del Sensor de Posición Del Acelerador - Probar PDFDocument8 paginiCircuito Del Sensor de Posición Del Acelerador - Probar PDFcarlosÎncă nu există evaluări
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDe la EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoÎncă nu există evaluări
- Montaje y mantenimiento de transformadores. ELEE0109De la EverandMontaje y mantenimiento de transformadores. ELEE0109Încă nu există evaluări
- IntroducciónDocument5 paginiIntroduccióndiego prado100% (5)
- Planes API para BombasDocument95 paginiPlanes API para Bombascothor100% (2)
- Especificaciones Del Gobernador Eg2000Document4 paginiEspecificaciones Del Gobernador Eg2000David CoronadoÎncă nu există evaluări
- Práctica 7 Control de Motores Eléctricos Cme Práctica 7 (Recuperado Automáticamente)Document19 paginiPráctica 7 Control de Motores Eléctricos Cme Práctica 7 (Recuperado Automáticamente)Angélica Bahena BahenaÎncă nu există evaluări
- Practica 6 TEORIA DE CONTROLDocument11 paginiPractica 6 TEORIA DE CONTROLMiguel GuerreroÎncă nu există evaluări
- TR 1 ElectricidadDocument9 paginiTR 1 ElectricidadEvelin Yadira Meza GarciaÎncă nu există evaluări
- Lab 34 Maquinas2Document10 paginiLab 34 Maquinas2Mauricio Lop100% (1)
- Manual Magnetorques Pala Electrica 2100bl Pyh Potencia Control Sistemas Electricos PDFDocument63 paginiManual Magnetorques Pala Electrica 2100bl Pyh Potencia Control Sistemas Electricos PDFRosauroRoldanÎncă nu există evaluări
- Analisis de Riesgos Del Proyecto Saneamiento PasacanchaDocument35 paginiAnalisis de Riesgos Del Proyecto Saneamiento Pasacanchajhonhilbert0% (2)
- Regulador de Velocidad FerromodelismoDocument9 paginiRegulador de Velocidad Ferromodelismoacpmax100% (7)
- Laboratorio 34Document9 paginiLaboratorio 34Aldo Daquilema Martinez100% (1)
- Control de Motor de Pasos Con MicrocontroladorDocument3 paginiControl de Motor de Pasos Con MicrocontroladorCarlo PalacioÎncă nu există evaluări
- Circuitos Electroneumáticos Con Un Solo ActuadorDocument9 paginiCircuitos Electroneumáticos Con Un Solo ActuadorffÎncă nu există evaluări
- Instalación, Arranque e Inversión de Marcha Del Motor Asíncrono Trifásico Con ContactoresDocument12 paginiInstalación, Arranque e Inversión de Marcha Del Motor Asíncrono Trifásico Con ContactoresRenzoÎncă nu există evaluări
- Informe Puente HDocument10 paginiInforme Puente HEdy CrackmasterÎncă nu există evaluări
- Practicas de Automatismo de Logica CableadaDocument20 paginiPracticas de Automatismo de Logica CableadaVictorS100% (1)
- PRUEBA No 3 Sistema de InyeccionDocument5 paginiPRUEBA No 3 Sistema de InyeccionLuis Santiago100% (1)
- Reporte Practica de Motor A PasosDocument13 paginiReporte Practica de Motor A PasosAlvarez Tomas0% (1)
- CR 02Document7 paginiCR 02Victor Manuel Valdez del BosqueÎncă nu există evaluări
- Componentes Del Sistema de Alimentación de Aire y CombustibleDocument8 paginiComponentes Del Sistema de Alimentación de Aire y CombustibleViktor Sebastian Morales CabreraÎncă nu există evaluări
- Motor CDDocument8 paginiMotor CDAlan Ponce FÎncă nu există evaluări
- LM555 Operando en Astable y MonoestableDocument4 paginiLM555 Operando en Astable y MonoestableCamilo OtaloraÎncă nu există evaluări
- Clase 2 CEMNIDocument18 paginiClase 2 CEMNILuis MandiqueÎncă nu există evaluări
- Prac 6 ElectroDocument19 paginiPrac 6 ElectroGALVAN CRUZ DANIELÎncă nu există evaluări
- Lab 6 - TX en Saturación - Puente H.Document9 paginiLab 6 - TX en Saturación - Puente H.sebastian mantillaÎncă nu există evaluări
- Proyecto PDFDocument22 paginiProyecto PDFKelvin Pantaleon RiofrioÎncă nu există evaluări
- Arranque de Un Motor Trifasico Tipo Sci A Tension Plena, Variador de Frecuencia y Una Con PLCDocument15 paginiArranque de Un Motor Trifasico Tipo Sci A Tension Plena, Variador de Frecuencia y Una Con PLCAna FloresÎncă nu există evaluări
- Valvula de RalentiDocument8 paginiValvula de RalentiVides AyalaÎncă nu există evaluări
- Taller Rele y ContactorDocument5 paginiTaller Rele y ContactorLiliana González H.Încă nu există evaluări
- LAB. 32 Parte 2 Motor de Fase HendidaDocument5 paginiLAB. 32 Parte 2 Motor de Fase HendidaCristhiam De LeónÎncă nu există evaluări
- Reporte Final de Electrónica de PotenciaDocument14 paginiReporte Final de Electrónica de PotenciacarlosdharemÎncă nu există evaluări
- Práctica 1 Arranque de Un Motor CD A Tiempo Definido Con Dos Pasos de Aceleración Usando El PLC Simatic S7200Document6 paginiPráctica 1 Arranque de Un Motor CD A Tiempo Definido Con Dos Pasos de Aceleración Usando El PLC Simatic S7200MarcoSandovalÎncă nu există evaluări
- L9 TimerDocument10 paginiL9 TimerJorge Luis Espinoza AcunaÎncă nu există evaluări
- Examen U3Document7 paginiExamen U3Luis PonceÎncă nu există evaluări
- Lab 55 - Grupo - 3BDocument7 paginiLab 55 - Grupo - 3BIsaias ForeroÎncă nu există evaluări
- Regulador Voltaje PI Discreto DigitalDocument6 paginiRegulador Voltaje PI Discreto DigitalJosé Ignacio Quintanilla AcevedoÎncă nu există evaluări
- Mando de Un Motor Desde Tres Puntos & Control de TiempoDocument6 paginiMando de Un Motor Desde Tres Puntos & Control de TiempoMijhael FernandezÎncă nu există evaluări
- Test Multipunto (Tensión) (Picoscope)Document5 paginiTest Multipunto (Tensión) (Picoscope)TonividaÎncă nu există evaluări
- Laboratorio #9 Multivibrador - TIMER 555Document8 paginiLaboratorio #9 Multivibrador - TIMER 555Fabrizio Andrei Zevallos SalazarÎncă nu există evaluări
- Práctica No. 2 de PachecoDocument5 paginiPráctica No. 2 de PachecoJonatan MartínezÎncă nu există evaluări
- Proyecto Final Ing - ControlDocument7 paginiProyecto Final Ing - ControlBrian Díaz de LeónÎncă nu există evaluări
- Practica3 Yahir AcostaDocument10 paginiPractica3 Yahir AcostaYahir AcostaÎncă nu există evaluări
- G4.3 Sanchez Roma MaquinaDCDocument8 paginiG4.3 Sanchez Roma MaquinaDCRobert RoigÎncă nu există evaluări
- Practicas ElectrohidraulicaDocument5 paginiPracticas ElectrohidraulicaEmigdio Velasco PalaciosÎncă nu există evaluări
- Laboratorio #9 Multivibrador - TIMER 555Document8 paginiLaboratorio #9 Multivibrador - TIMER 555Fabrizio Andrei Zevallos SalazarÎncă nu există evaluări
- Examen Parcial de Controles Electricos y AutomatizacionDocument24 paginiExamen Parcial de Controles Electricos y AutomatizacionKevin SantamariaÎncă nu există evaluări
- Cen MS4Document24 paginiCen MS4lemur6666Încă nu există evaluări
- Manual de ActuadoresDocument48 paginiManual de Actuadoresdiegomonta714Încă nu există evaluări
- #2 BuenDocument17 pagini#2 BuenCarlos Carreño MuñozÎncă nu există evaluări
- Cambio Giro PLCDocument7 paginiCambio Giro PLCMiguel Perez FloresÎncă nu există evaluări
- Practica Laboratorio TacometroDocument12 paginiPractica Laboratorio Tacometroaleixo eder0% (1)
- Mmad Mmad-414 TrabajofinalDocument7 paginiMmad Mmad-414 TrabajofinalAlexanderÎncă nu există evaluări
- Control de Motor de PasoDocument4 paginiControl de Motor de PasoKevin PechoÎncă nu există evaluări
- Práctica BoostDocument5 paginiPráctica BoostVanessa MedranoÎncă nu există evaluări
- Práctica Parte 2 Motor de Fase HendidaDocument9 paginiPráctica Parte 2 Motor de Fase HendidaRoxxio Sanchez100% (1)
- Practica 1 MaquinasDocument10 paginiPractica 1 Maquinashumberguero0Încă nu există evaluări
- Prac 30 Sincronizacion Del AlternadorDocument4 paginiPrac 30 Sincronizacion Del AlternadorXavierRobalinoÎncă nu există evaluări
- Capítulo 11Document36 paginiCapítulo 11Martín ArandaÎncă nu există evaluări
- Modelos de Producción SocialDocument11 paginiModelos de Producción SocialUPTA OnlineÎncă nu există evaluări
- Trabajo Del ReciclajeDocument5 paginiTrabajo Del ReciclajeYusmey GilÎncă nu există evaluări
- Teoria Taller ElectronicaDocument5 paginiTeoria Taller ElectronicaAngel Hernandez Bravo100% (1)
- 38 Funcionamiento y Tipos de Cronometros (Modo de Compatibilidad)Document36 pagini38 Funcionamiento y Tipos de Cronometros (Modo de Compatibilidad)Diego John Gavilanes UvidiaÎncă nu există evaluări
- Unidad PRINCIPIOS DE ELECTRICIDAD Segundo Año Guia+cesfDocument17 paginiUnidad PRINCIPIOS DE ELECTRICIDAD Segundo Año Guia+cesfAbsalon DiazÎncă nu există evaluări
- Especificaciones TecnicasDocument78 paginiEspecificaciones TecnicasEmerson Adriano Coello ArangoÎncă nu există evaluări
- Peces DietasDocument10 paginiPeces DietasEdwards Milton Sullon Sullon100% (1)
- Prueba Teorica Practica SolucionesDocument43 paginiPrueba Teorica Practica SolucionesMaria Veronica Mondaca EspinozaÎncă nu există evaluări
- Catalogo Cogarsa PDFDocument139 paginiCatalogo Cogarsa PDFJose HernandezÎncă nu există evaluări
- Fuente de Alimentación de CC de Salida MúltipleDocument33 paginiFuente de Alimentación de CC de Salida MúltipleKike CastilloÎncă nu există evaluări
- Smart Voyager Líneas Aéreas Versión Marzo 2008 WWW - Ccd.org - Ec, Sugerencias@ccd - Org.ecDocument57 paginiSmart Voyager Líneas Aéreas Versión Marzo 2008 WWW - Ccd.org - Ec, Sugerencias@ccd - Org.ecCONSERVACION Y DESARROLLO SOSTENIBLEÎncă nu există evaluări
- Manual SAIDocument59 paginiManual SAIAnonymous oPInocXÎncă nu există evaluări
- Soldar Con Soldadura Por Arco Eléctrico Con GasDocument10 paginiSoldar Con Soldadura Por Arco Eléctrico Con GasJean carlos Patala sanchezÎncă nu există evaluări
- Autotransformadores MonofasicosDocument17 paginiAutotransformadores MonofasicosArming Bonilla HernandezÎncă nu există evaluări
- Procedimiento General Del Proyecto de Perforacion para El Campo Caigua Cai-15DDocument90 paginiProcedimiento General Del Proyecto de Perforacion para El Campo Caigua Cai-15DDICMAR VERGARA OTALORAÎncă nu există evaluări
- Review Amoladora Angular GWS 7-125Document3 paginiReview Amoladora Angular GWS 7-125Jesús CarriónÎncă nu există evaluări
- Generador - Barra InfinitaDocument3 paginiGenerador - Barra InfinitaJorge Arturo Medina GutierrezÎncă nu există evaluări
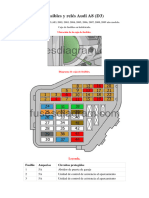
- Fusibles Reles A8Document14 paginiFusibles Reles A8Oscar CaballeroÎncă nu există evaluări
- Trabajo Final Diseño de ProyectosDocument47 paginiTrabajo Final Diseño de ProyectosNestor Cortina Viana0% (1)
- Contacostos2ae Ud PDFDocument66 paginiContacostos2ae Ud PDFAndres Estupiñan0% (1)
- Cirsa 1 36Document35 paginiCirsa 1 36David MilichÎncă nu există evaluări
- Friccion Estatica y CineticaDocument9 paginiFriccion Estatica y Cineticaale184Încă nu există evaluări
- Lou 2 Secado AvanceDocument22 paginiLou 2 Secado Avancefranz depazÎncă nu există evaluări
- CT Biposte HADocument21 paginiCT Biposte HAmiguel reynagaÎncă nu există evaluări
- Biomasa y Bioproductos PPT Prodero-1Document14 paginiBiomasa y Bioproductos PPT Prodero-1EcoformanAlbertoÎncă nu există evaluări
- Colores de Tuberias HospitalDocument2 paginiColores de Tuberias HospitalRogelio Martinez100% (1)
- Tema6 Circuitos de Polarizaci N Del BJTDocument0 paginiTema6 Circuitos de Polarizaci N Del BJTWant90XÎncă nu există evaluări