S-ar putea să vă placă și
- Ideal Money and Asymptotically Ideal MoneyDocument8 paginiIdeal Money and Asymptotically Ideal MoneySteven EdwardsÎncă nu există evaluări
- Financial Action Task Force On Money Laundering: Annual Report 1996-1997Document91 paginiFinancial Action Task Force On Money Laundering: Annual Report 1996-1997jejudoÎncă nu există evaluări
- Working Paper: Electronic Money by Barbara A. GoodDocument72 paginiWorking Paper: Electronic Money by Barbara A. GoodjejudoÎncă nu există evaluări
- W 22533Document65 paginiW 22533jejudoÎncă nu există evaluări
- Money: Everyday EconomicsDocument20 paginiMoney: Everyday Economicshello1 youÎncă nu există evaluări
- Money ManagementDocument39 paginiMoney ManagementLouie F. Ramirez IIÎncă nu există evaluări
- OECD - Future of MoneyDocument171 paginiOECD - Future of Money이영래Încă nu există evaluări
- PHYS 1100 DC Circuits SolutionsDocument14 paginiPHYS 1100 DC Circuits SolutionsYihun TsegayeÎncă nu există evaluări
- SVE14A37CXHDocument2 paginiSVE14A37CXHjejudoÎncă nu există evaluări
- Ug 12Document232 paginiUg 12Luis RodriguezÎncă nu există evaluări
- Electric, Electrical, or ElectronicDocument3 paginiElectric, Electrical, or ElectronicjejudoÎncă nu există evaluări
- Faculty Moodle ManualDocument48 paginiFaculty Moodle Manualdiamond5000Încă nu există evaluări
- RM 12Document1.098 paginiRM 12Luis Rodriguez100% (1)
- Prevalence of Selfie Addiction Among Junior College StudentsDocument4 paginiPrevalence of Selfie Addiction Among Junior College StudentsjejudoÎncă nu există evaluări
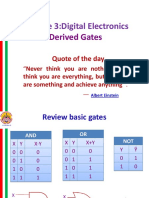
- Module 3:digital Electronics: Derived GatesDocument21 paginiModule 3:digital Electronics: Derived GatesjejudoÎncă nu există evaluări
- Enhancements On The Hyperplane Arrangements in Mixed Integer TechniquesDocument6 paginiEnhancements On The Hyperplane Arrangements in Mixed Integer TechniquesjejudoÎncă nu există evaluări
- Enhancements On The Hyperplanes Arrangements in Mixed-Integer Programming TechniquesDocument24 paginiEnhancements On The Hyperplanes Arrangements in Mixed-Integer Programming TechniquesjejudoÎncă nu există evaluări
- On The Hyperplanes Arrangements in Mixed-Integer TechniquesDocument6 paginiOn The Hyperplanes Arrangements in Mixed-Integer TechniquesjejudoÎncă nu există evaluări
- Predictive Control For Tight Group Formation of Multi-Agent SystemsDocument6 paginiPredictive Control For Tight Group Formation of Multi-Agent SystemsjejudoÎncă nu există evaluări
- Sonar-Based Mobile Robot Navigation Through Supervised Learning On A Neural NetDocument20 paginiSonar-Based Mobile Robot Navigation Through Supervised Learning On A Neural NetjejudoÎncă nu există evaluări
- A Sonar Approach To Obstacle Detection For A Vision-Based Autonomous WheelchairDocument15 paginiA Sonar Approach To Obstacle Detection For A Vision-Based Autonomous WheelchairjejudoÎncă nu există evaluări
- Path Following With Collision Avoidance and Velocity Constraints For Multi-Agent SystemsDocument6 paginiPath Following With Collision Avoidance and Velocity Constraints For Multi-Agent SystemsjejudoÎncă nu există evaluări
- Following A Wall by An Autonomous Mobile Robot With A Sonar-RingDocument8 paginiFollowing A Wall by An Autonomous Mobile Robot With A Sonar-RingjejudoÎncă nu există evaluări
- Mux CD4052Document14 paginiMux CD4052neonavÎncă nu există evaluări
- Matlab Tutorial1Document9 paginiMatlab Tutorial1Asterix100% (6)
- Self-Localization Using Sporadic FeaturesDocument9 paginiSelf-Localization Using Sporadic FeaturesjejudoÎncă nu există evaluări
- Software PID Control of An Inverted Pendulum Using The PIC16F684Document14 paginiSoftware PID Control of An Inverted Pendulum Using The PIC16F684Antony Charles TejadaÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Self Incompatibility: Dr. L.K.GangwarDocument38 paginiSelf Incompatibility: Dr. L.K.GangwarSiddhant Singh100% (1)
- JSTLDocument4 paginiJSTLSanjeeb PradhanÎncă nu există evaluări
- Presentation 1Document15 paginiPresentation 1Ashish SharmaÎncă nu există evaluări
- 11 Rabino v. Cruz 222 SCRA 493Document4 pagini11 Rabino v. Cruz 222 SCRA 493Joshua Janine LugtuÎncă nu există evaluări
- Detailed Lesson Plan in English I. ObjectivesDocument3 paginiDetailed Lesson Plan in English I. ObjectivesJenefer Tunares100% (1)
- The Intentionality of Sensation A Grammatical Feature GEM Anscombe PDFDocument21 paginiThe Intentionality of Sensation A Grammatical Feature GEM Anscombe PDFLorenz49Încă nu există evaluări
- Minimalism of InformationDocument125 paginiMinimalism of InformationRastko VukovicÎncă nu există evaluări
- In Defense of Imam BarbahariDocument12 paginiIn Defense of Imam Barbahariiliaswa33Încă nu există evaluări
- 2008-12-16Document32 pagini2008-12-16CoolerAdsÎncă nu există evaluări
- SCK MagazinDocument27 paginiSCK Magazinadmin_sckriensÎncă nu există evaluări
- Radical Disciple 1Document4 paginiRadical Disciple 1Milton LucasÎncă nu există evaluări
- Examples in C++Document39 paginiExamples in C++ZhvannÎncă nu există evaluări
- Edward Taylor S PoemsDocument6 paginiEdward Taylor S PoemsGodofwarÎncă nu există evaluări
- National Social Protection Strategy GhanaDocument95 paginiNational Social Protection Strategy GhanaSisiraPinnawalaÎncă nu există evaluări
- Hormones MTFDocument19 paginiHormones MTFKarla Dreams71% (7)
- 21st Century Managerial and Leadership SkillsDocument19 pagini21st Century Managerial and Leadership SkillsRichardRaqueno80% (5)
- Week 1Document3 paginiWeek 1Markdel John EspinoÎncă nu există evaluări
- Ucsp Module 6 W:B Answer SheetDocument5 paginiUcsp Module 6 W:B Answer SheetAl Cheeno Anonuevo100% (1)
- Dallas Baptist University Writing Center: Narrative EssayDocument3 paginiDallas Baptist University Writing Center: Narrative EssayumagandhiÎncă nu există evaluări
- OODBSDocument29 paginiOODBSMinh Tu TranÎncă nu există evaluări
- IEM Notes Unit-2Document2 paginiIEM Notes Unit-2Ashish YadavÎncă nu există evaluări
- Visual Development Milestones and Visual Acuity Assessment in ChildrenDocument2 paginiVisual Development Milestones and Visual Acuity Assessment in ChildrenNikhil Maha DevanÎncă nu există evaluări
- Junto, Brian Cesar S.Document1 paginăJunto, Brian Cesar S.Brian Cesar JuntoÎncă nu există evaluări
- State MottosDocument3 paginiState MottosFrancisco MedinaÎncă nu există evaluări
- I Semester Financial Accounting - Bpz1A: Theory 15 Problems 60Document28 paginiI Semester Financial Accounting - Bpz1A: Theory 15 Problems 60Blaze MysticÎncă nu există evaluări
- Omer Farooq ResumeDocument3 paginiOmer Farooq ResumemykdesignerÎncă nu există evaluări
- MIS ProjectDocument12 paginiMIS ProjectDuc Anh67% (3)
- Six SigmaDocument80 paginiSix Sigmaarifmukhtar100% (2)
- Introductory Lesson MburghDocument2 paginiIntroductory Lesson Mburghapi-315866938Încă nu există evaluări
- SU05Document114 paginiSU05saopaulo100% (1)